- Механизм, автомат, робот

Содержание
- 2. 1.Механизм, автомат, робот Механизм - устройство с помощью которого человек выполняет физическую работу. Автомат - устройство,
- 3. 2.Виды роботов и применение Стационарные Мобильные Применение: Промышленность Экстремальная робототехника Военная робототехника Логистика Космос Персональные роботы
- 4. 3.Схема робота
- 5. 4.Основные детали конструктора Размер модуля: 8 мм Несущие детали: балка, изогнутая балка,крестообразная ось, вал, ось со
- 6. 5.Виды крепления шарнир и жесткий узел.
- 7. 6.Рычаг первого рода Качели Ножницы Молоток
- 8. Рычаг второго рода Тачка Приподнимание предмета
- 9. Рычаг третьего рода Крышка багажника машины Подъем кузова самосвала Движения мышц рук и ног
- 10. 7. Механическая передача - механизм обеспечивающий передачу и преобразование механического движения. Зубчатая прямая
- 11. червячная
- 12. планетарная
- 13. реечная
- 14. ременная
- 15. цепная
- 16. Ведущий вал Ведомый вал
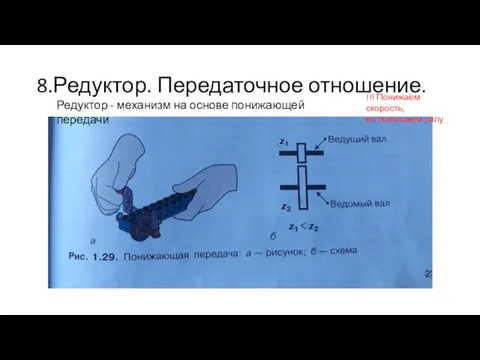
- 17. 8.Редуктор. Передаточное отношение. Редуктор - механизм на основе понижающей передачи !!! Понижаем скорость, но повышаем силу
- 18. количество зубчиков ведомой оси количество зубчиков ведущей оси i = Z2 Z1 Передаточное число =
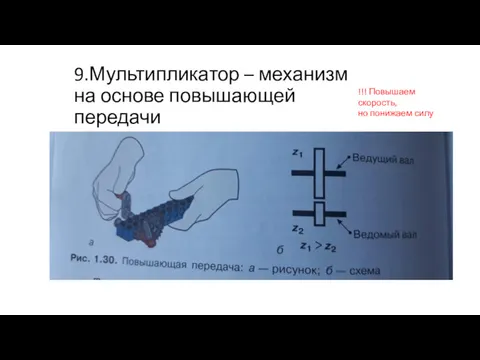
- 19. 9.Мультипликатор – механизм на основе повышающей передачи !!! Повышаем скорость, но понижаем силу
- 20. количество зубчиков ведомой оси количество зубчиков ведущей оси i = Z2 Z1 Передаточное число =
- 21. 10.Паразитная шестерня шестерня, устанавливаемая между двумя другими, для обеспечения одинакового направления их вращения. Паразитная шестерня не
- 22. 11. Ремённая передача. Шкив. Пассик. Открытая, перекрёстная. Открытая Перекрестная Шкив Пассик
- 23. 12. Фрикционная передача.
- 24. 13.Червячная передача.
- 25. 14. Соосный редуктор.
- 26. 15.Одномоторная тележка. Свой вариант приветствуется.
- 27. 16. Шагающий робот.
- 29. Скачать презентацию
1.Механизм, автомат, робот
Механизм - устройство с помощью которого человек выполняет физическую
1.Механизм, автомат, робот
Механизм - устройство с помощью которого человек выполняет физическую
2.Виды роботов и применение
Стационарные
Мобильные
Применение:
Промышленность
Экстремальная робототехника
Военная робототехника
Логистика
Космос
Персональные роботы
2.Виды роботов и применение
Стационарные
Мобильные
Применение:
Промышленность
Экстремальная робототехника
Военная робототехника
Логистика
Космос
Персональные роботы
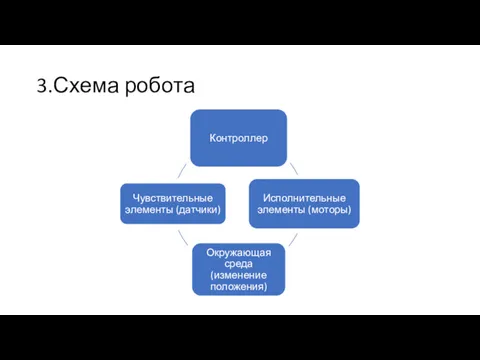
3.Схема робота
3.Схема робота
4.Основные детали конструктора
Размер модуля: 8 мм
Несущие детали: балка, изогнутая балка,крестообразная ось,
4.Основные детали конструктора
Размер модуля: 8 мм
Несущие детали: балка, изогнутая балка,крестообразная ось,
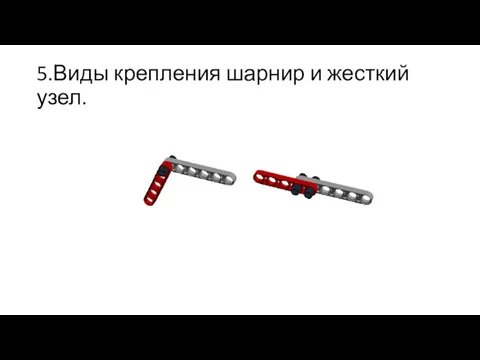
5.Виды крепления шарнир и жесткий узел.
5.Виды крепления шарнир и жесткий узел.
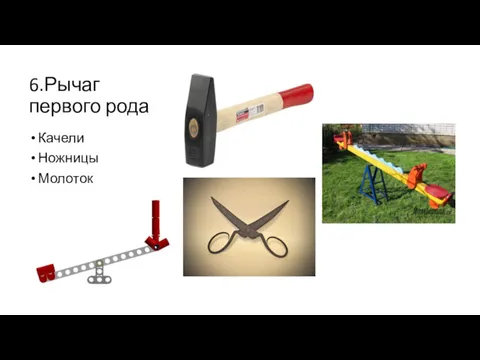
6.Рычаг первого рода
Качели
Ножницы
Молоток
6.Рычаг первого рода
Качели
Ножницы
Молоток

Рычаг второго рода
Тачка
Приподнимание
предмета
Рычаг второго рода
Тачка
Приподнимание
предмета

Рычаг третьего рода
Крышка багажника машины
Подъем кузова самосвала
Движения мышц рук и ног
Рычаг третьего рода
Крышка багажника машины
Подъем кузова самосвала
Движения мышц рук и ног

7. Механическая передача - механизм обеспечивающий передачу и преобразование механического движения.
7. Механическая передача - механизм обеспечивающий передачу и преобразование механического движения.

червячная
червячная

планетарная
планетарная
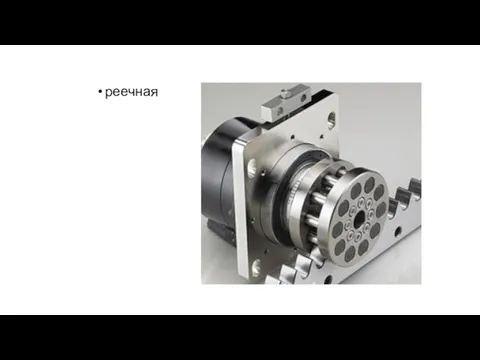
реечная
реечная
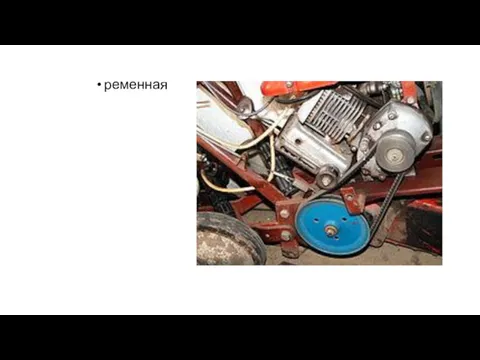
ременная
ременная
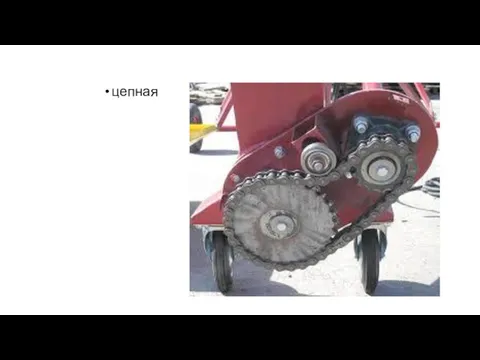
цепная
цепная
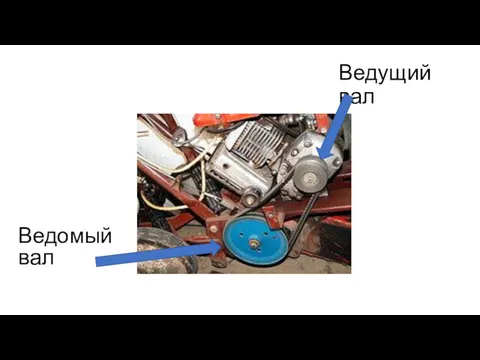
Ведущий вал
Ведомый вал
Ведущий вал
Ведомый вал
8.Редуктор. Передаточное отношение.
Редуктор - механизм на основе понижающей передачи
!!! Понижаем скорость,
но
8.Редуктор. Передаточное отношение.
Редуктор - механизм на основе понижающей передачи
!!! Понижаем скорость,
но

количество зубчиков ведомой оси
количество зубчиков ведущей оси
i =
Z2
Z1
Передаточное
количество зубчиков ведомой оси
количество зубчиков ведущей оси
i =
Z2
Z1
Передаточное
9.Мультипликатор – механизм на основе повышающей передачи
!!! Повышаем скорость,
но понижаем силу
9.Мультипликатор – механизм на основе повышающей передачи
!!! Повышаем скорость,
но понижаем силу

количество зубчиков ведомой оси
количество зубчиков ведущей оси
i =
Z2
Z1
Передаточное
количество зубчиков ведомой оси
количество зубчиков ведущей оси
i =
Z2
Z1
Передаточное

10.Паразитная шестерня
шестерня, устанавливаемая между двумя другими, для обеспечения одинакового направления их
10.Паразитная шестерня
шестерня, устанавливаемая между двумя другими, для обеспечения одинакового направления их

11. Ремённая передача. Шкив. Пассик. Открытая, перекрёстная.
Открытая
Перекрестная
Шкив
Пассик
11. Ремённая передача. Шкив. Пассик. Открытая, перекрёстная.
Открытая
Перекрестная
Шкив
Пассик

12. Фрикционная передача.
12. Фрикционная передача.
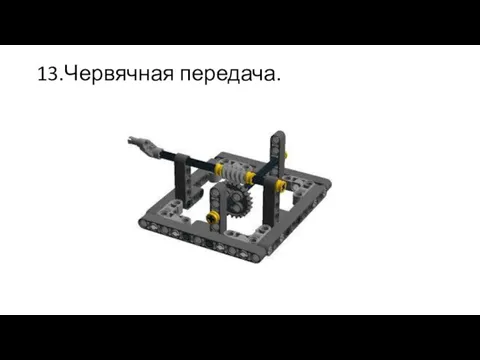
13.Червячная передача.
13.Червячная передача.
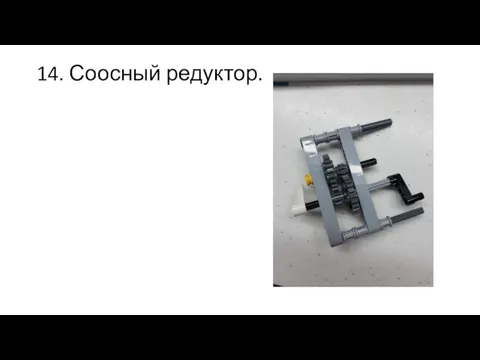
14. Соосный редуктор.
14. Соосный редуктор.

15.Одномоторная тележка. Свой вариант приветствуется.
15.Одномоторная тележка. Свой вариант приветствуется.
16. Шагающий робот.
16. Шагающий робот.
 Замедление и диффузия нейтронов
Замедление и диффузия нейтронов Техническое обслуживание и ремонт неисправностей карданной передачи
Техническое обслуживание и ремонт неисправностей карданной передачи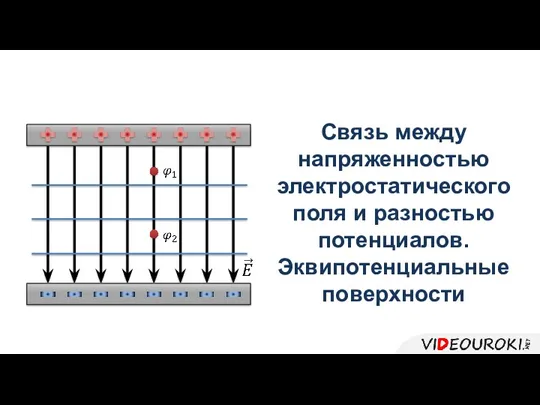 Связь между напряженностью электростатического поля и разностью потенциалов. Эквипотенциальные поверхности
Связь между напряженностью электростатического поля и разностью потенциалов. Эквипотенциальные поверхности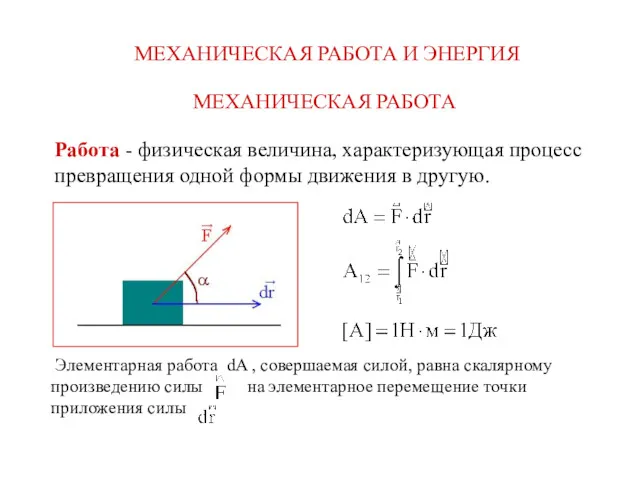 Механическая работа и энергия
Механическая работа и энергия Элементарные частицы
Элементарные частицы Презентация Метод проектов на уроках физики
Презентация Метод проектов на уроках физики Ремонт системы питания КамАЗ 4326
Ремонт системы питания КамАЗ 4326 Характеристики синхронных генераторов. Ремонт и наладка коммутационной аппаратуры. (Билет 17)
Характеристики синхронных генераторов. Ремонт и наладка коммутационной аппаратуры. (Билет 17)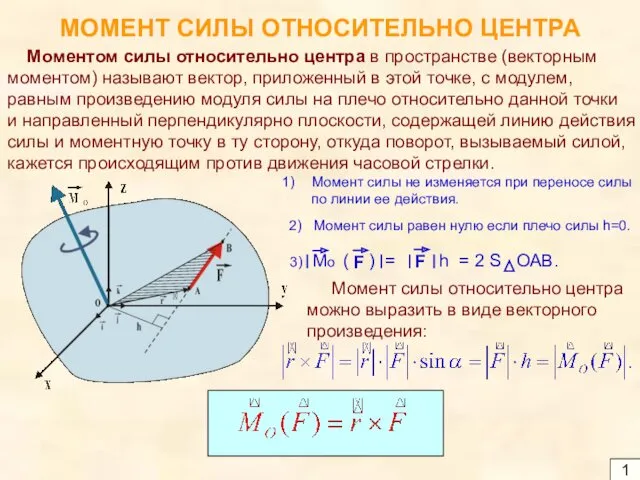 Момент силы относительно центра
Момент силы относительно центра Привод устройства сцепления автомобиля Камаз
Привод устройства сцепления автомобиля Камаз Атомный ледокол Ленин
Атомный ледокол Ленин Жүйке талшығымен қозу өткізу заңдары. Парабиоз. Синапстардың физиологиялық қасиеттері
Жүйке талшығымен қозу өткізу заңдары. Парабиоз. Синапстардың физиологиялық қасиеттері Презентация по теме-Атмосферное давление Доказательство существования атмосферного давления
Презентация по теме-Атмосферное давление Доказательство существования атмосферного давления Презентация коллоквиума Стат
Презентация коллоквиума Стат источники света
источники света Соответствие микроклимата учебных кабинетов санитарным правилам и нормам
Соответствие микроклимата учебных кабинетов санитарным правилам и нормам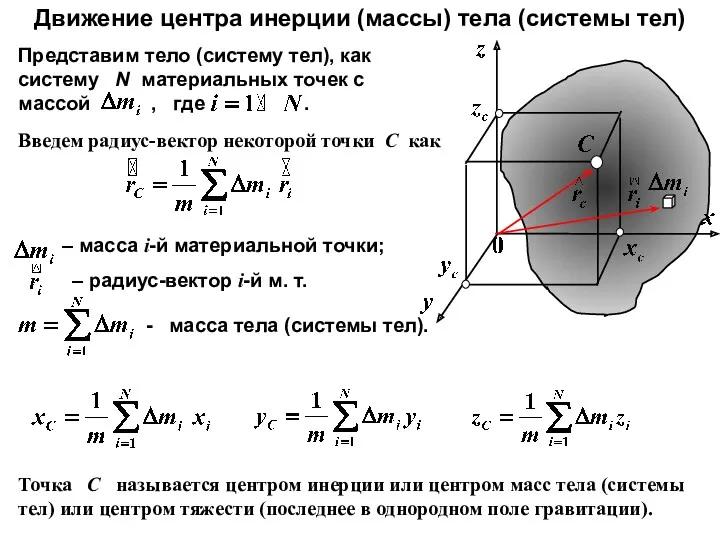 Динамика вращательного движения
Динамика вращательного движения Электрический ток
Электрический ток Атомная физика. Строение атома
Атомная физика. Строение атома Надпровідність. Перспективи та застосування. Надпровідники. Лампа, діод, транзистор. Електричний струм у металах
Надпровідність. Перспективи та застосування. Надпровідники. Лампа, діод, транзистор. Електричний струм у металах Люминесцентный анализ
Люминесцентный анализ Презентация по физике Шаровая молния
Презентация по физике Шаровая молния Основы термодинамики. (Лекция 4)
Основы термодинамики. (Лекция 4) Плотность. Масса. Объем
Плотность. Масса. Объем работа и энергия
работа и энергия Детали машин (часть 1)
Детали машин (часть 1) Производство электрической энергии
Производство электрической энергии Взаимодействие тоннелей глубокого заложения с грунтовым массивом. (Лекция 7)
Взаимодействие тоннелей глубокого заложения с грунтовым массивом. (Лекция 7)