- Непрерывно-детерминированные модели (D-схемы)

Содержание
- 2. Математическое соотношение (6) для детерминированных систем может определяться условиями где вектор-функция, непрерывная на некотором (n+1)-мерном множестве,
- 3. или и т. д. Уравнения 2-го порядка
- 4. В простейшем случае (одна выходная характеристика) дифференциальные уравнения принимают вид и т. д.
- 5. Общее уравнение D-схемы (для одного входа и одного выхода) имеет вид где х, у – функции
- 6. Схемы вида (7) – (8) отражают динамику изучаемой системы (поведение во времени) называются D-схемами (англ. dynamic).
- 7. 1. Элементарная система механической природы. Процесс свободных колебаний маятника описывается обыкновенным дифференциальным уравнением m, l –
- 8. Из уравнения можно получить оценки характеристик системы. Например, период колебаний маятника
- 9. 2. Элементарная система электрической природы. Процессы в электрическом колебательном контуре описываются обыкновенным дифференциальным уравнением L –
- 10. Из уравнения можно получить оценки характеристик системы. Например, период характеристических колебаний
- 11. Введем обозначения: Получим диф. уравнение 2-го порядка, описывающее поведение замкнутой системы: где h0, h1, h2 –
- 12. Выводы: поведение двух рассмотренных выше систем разной природы может быть исследовано на основе общей математической модели
- 13. Если изучаемая система S (маятник или контур) взаимодействует с внешней средой Е, то появляется входное воздействие
- 14. Возможные приложения (САУ) Система управления (СУ) – это совокупность взаимодействующих между собой объекта управления (управляемой системы)
- 15. УУ – управляющее устройство; ОУ – объект управления; ИМ – исполняющий механизм (усиливает и/или преобразует сигнал
- 16. Основные задачи систем управления Стабилизация системы – поддержание заданного режима работы, несмотря на действие помех. Примеры:
- 17. Выполнение программы – управление по заранее заданной программе (задающее воздействие меняется, но закон изменения известен). Примеры:
- 18. Слежение за неизвестным задающим сигналом. Задающее воздействие заранее неизвестно и определяется внешними факторами. Примеры: слежение за
- 19. В САУ управление объектом осуществляется без непосредственного участия человека автоматическими устройствами на основе запрограммированных алгоритмов управления.
- 20. СУ и любой ее элемент производят преобразование входного сигнала x(t) в выходной сигнал y(t). С математической
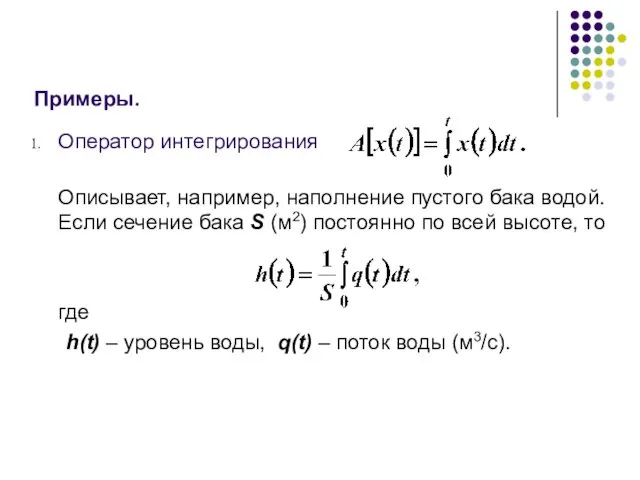
- 21. Примеры. Оператор интегрирования Описывает, например, наполнение пустого бака водой. Если сечение бака S (м2) постоянно по
- 22. Оператор дифференцирования Применяется в электротехнике: i – ток (в амперах), и – разность потенциалов (в вольтах)
- 23. Звено – это математическая модель системы или любой ее подсистемы, определяемой некоторым оператором. В частности, звено
- 24. По виду операторов, которыми описывается СУ, системы подразделяют на линейные (все звенья описываются линейными операторами); нелинейные
- 25. После линеаризации непрерывная СУ с одним входом х и одним выходом у может быть описана уравнением
- 26. Введем обозначение для операции дифференцирования: Равенство по определению p – оператор дифференцирования
- 27. Тогда уравнение (10) может быть записано в операторной форме:
- 28. Обозначим Тогда уравнение СУ запишется в виде: (11') Уравнения (10), (11), (11') описывают модель «вход-выход» (связывают
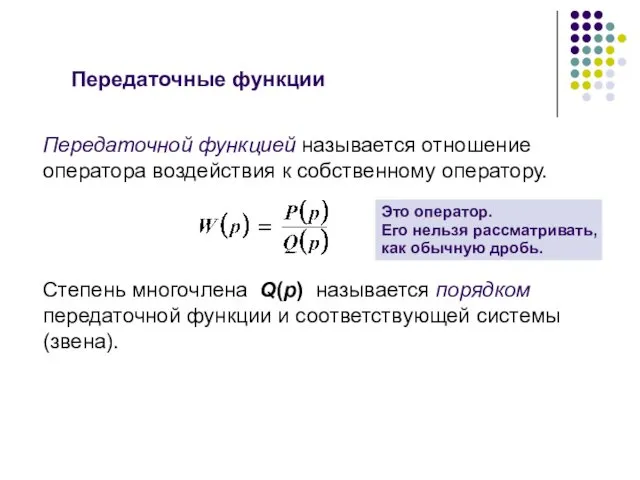
- 29. Передаточные функции Передаточной функцией называется отношение оператора воздействия к собственному оператору. Степень многочлена Q(p) называется порядком
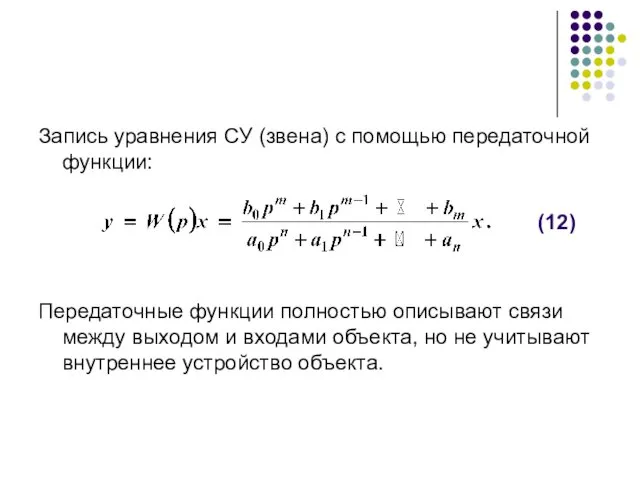
- 30. Запись уравнения СУ (звена) с помощью передаточной функции: Передаточные функции полностью описывают связи между выходом и
- 31. Пример. Пусть звено СУ описывается дифференциальным уравнением Уравнение в операторной форме: Передаточная функция равна уравнение звена
- 32. Принцип суперпозиции Для линейных СУ: реакция системы на несколько одновременно действующих воздействий равна сумме реакций на
- 33. Переходная функция Один из методов построения и исследования моделей «вход-выход» – определение реакции СУ (звена) на
- 34. Переходной функцией СУ (звена) называется функция, описывающая реакцию системы на единичное ступенчатое воздействие при нулевых начальных
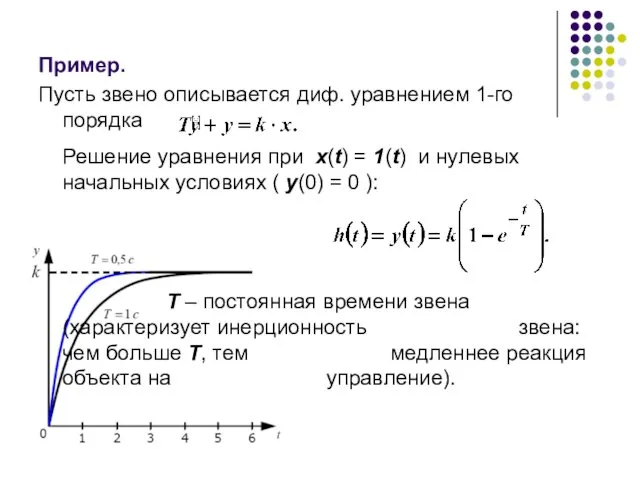
- 35. Пример. Пусть звено описывается диф. уравнением 1-го порядка Решение уравнения при х(t) = 1(t) и нулевых
- 36. Структурные схемы Структурной схемой СУ называется графическое представление ее математической модели в виде соединений звеньев, представляемых
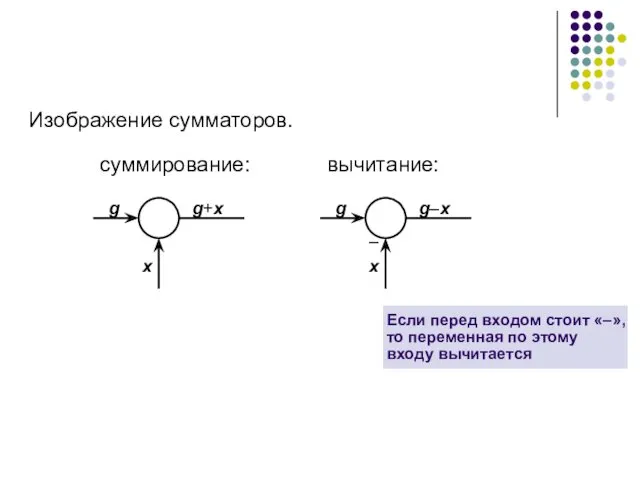
- 37. Изображение сумматоров. суммирование: вычитание: Если перед входом стоит «–», то переменная по этому входу вычитается
- 38. Последовательное соединение звеньев Так называется соединение, при котором выходная переменная предшествующего звена является входной переменной последующего
- 39. Параллельное соединение звеньев Так называется соединение, при котором на входы всех звеньев подается одно и то
- 40. Обратное соединение (звено, охваченное обратной связью) Так называется соединение двух звеньев, при котором выход звена прямой
- 41. Если Wос = 1, то обратное соединение изображается так:
- 42. Передаточная функция при обратном соединении равна где Wк(р) = Wп(р)Wос(р)WΣ(р), Передаточная функция контура
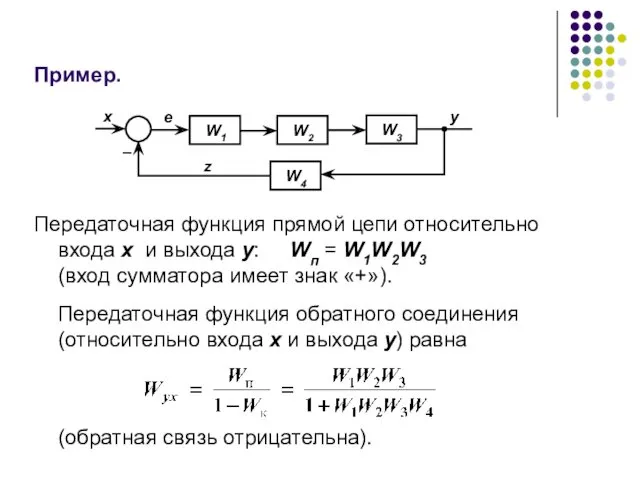
- 43. Пример. Передаточная функция прямой цепи относительно входа x и выхода y: Wп = W1W2W3 (вход сумматора
- 44. Анализ непрерывных САУ Включает исследование системы на устойчивость; исследование качества управления в переходном и установившемся режиме.
- 45. Устойчивость – одно из основных требований к САУ. Требуется: путем выбора структуры и параметров СУ обеспечивать
- 46. Если на СУ действуют два внешних воздействия: задающее воздействие x и возмущение v, то в общем
- 47. или, в операторной форме: (13′) При x ≡ 0 и v ≡ 0 – однородное дифференциальное
- 48. Назначение СУ – поддержание заданного режима, называемого невозмущенным движением. Если на систему действует возмущение, то фактическое
- 49. Невозмущенное движение называется асимптотически устойчивым, если после окончания действия возмущения возмущенное движение y(t) стремится к невозмущенному
- 50. Общее решение уравнения (13′) имеет вид y(t) = yв(t) + yс(t), где yс(t) – общее решение
- 51. При отсутствии возмущающих воздействий (v ≡ 0) yв(t) = yx(t) = yн(t). Если в начальный момент
- 52. Характеристическое уравнение СУ Характеристическое уравнение СУ, которая описывается уравнением (13), – это характеристическое уравнение дифференциального уравнения
- 53. Если λi, i = 1, 2, …, q – корни уравнения (15) кратности ki (k1 +
- 54. Необходимое условие устойчивости Для того, чтобы СУ была устойчива, необходимо, чтобы все коэффициенты ее характеристического уравнения
- 55. Алгебраические критерии устойчивости Это проверка условий, накладываемых на коэффициенты характеристического уравнения (полинома). В результате: корни характеристического
- 56. Критерий Гурвица Из коэффициентов характеристического полинома составляется определитель n-го порядка Если индекс превышает n или принимает
- 57. Главные миноры определителя (17) включая сам определитель Δn, называются определителями Гурвица.
- 58. Критерий Гурвица (Hurwitz, 1895): для того, чтобы СУ была устойчива, необходимо и достаточно, чтобы определители Гурвица,
- 59. Критерий Льенарда-Шипарда При выполнении необходимого условия устойчивости для проверки устойчивости СУ необязательно вычислять все определители Гурвица.
- 60. Пример. Исследуем устойчивость разомкнутой и замкнутой систем где Характеристический полином разомкнутой системы Q(λ) = λ3 +
- 61. Передаточная функция замкнутой системы равна характеристический полином замкнутой системы Q*(λ) = λ3 + λ2 + λ
- 62. В данном случае проще проверять условие (18). При k = 0,5 замкнутая система устойчива. При k
- 63. Определение области устойчивости При заданной структуре (состав элементов и связи между ними) СУ какие-либо параметры могут
- 64. Если существуют такие значения варьируемых параметров, при которых система устойчива (существует область устойчивости), то система называется
- 65. Пример. Определим область устойчивости замкнутой системы на плоскости параметров (k, T). Характеристический полином замкнутой системы имеет
- 66. Применим критерий Льенарда-Шипарда: С учетом необходимого условия: Эта система неравенств определяет область устойчивости.
- 67. Показатели качества СУ Под качеством системы управления понимается совокупность показателей, которые прямо или косвенно характеризуют точность
- 68. Наиболее полная характеристика качества СУ – ошибка е(t) = x(t) – y(t). Это функция времени, что
- 69. Показатели качества: в переходном режиме; в установившемся режиме. Показатели качества как характеристики свойств системы находят при
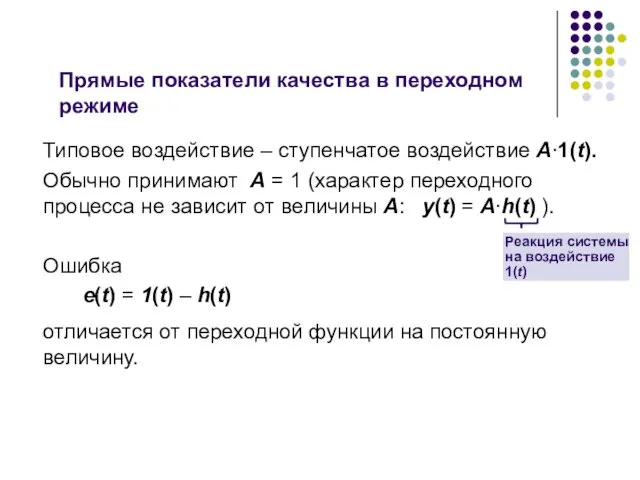
- 70. Прямые показатели качества в переходном режиме Типовое воздействие – ступенчатое воздействие А∙1(t). Обычно принимают А =
- 71. Прямые показатели качества – это показатели, которые получаются непосредственно по переходной характеристике. Наиболее часто используются: время
- 72. Время регулирования. Временем регулирования tp называется минимальное время (с момента подачи ступенчатого воздействия), по истечении которого
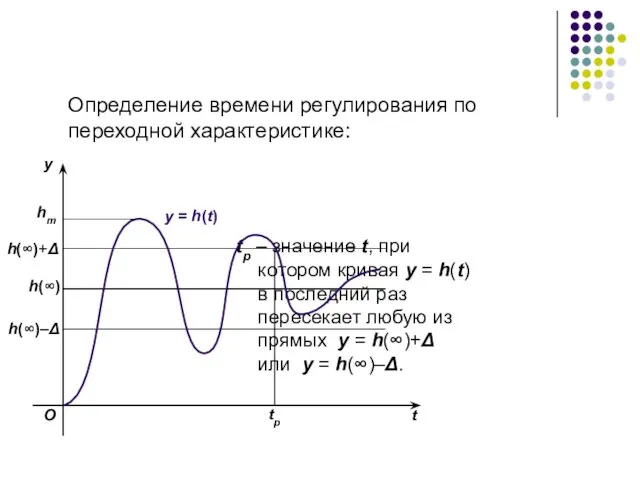
- 73. Определение времени регулирования по переходной характеристике: tp – значение t, при котором кривая y = h(t)
- 74. Перерегулирование. Перерегулирование σ определяется следующим образом: где hm – максимальное значение переходной функции. Это максимальное отклонение
- 75. Если ступенчатое воздействие подается на вход, где действует возмущение f(t) = A0∙1(t), то установившееся значение выходной
- 76. Другие прямые показатели Число колебаний за время регулирования tp. Обозначение – Nk. Можно рассматривать как прямой
- 77. Общая модель САУ В общем случае САУ описывается следующими величинами. Эндогенные переменные: – вектор входных (задающих)
- 78. Структура САУ Ошибка управления
- 79. При проектировании и эксплуатации САУ – выбор параметров системы S, которые обеспечили бы требуемую точность управления,
- 81. Скачать презентацию
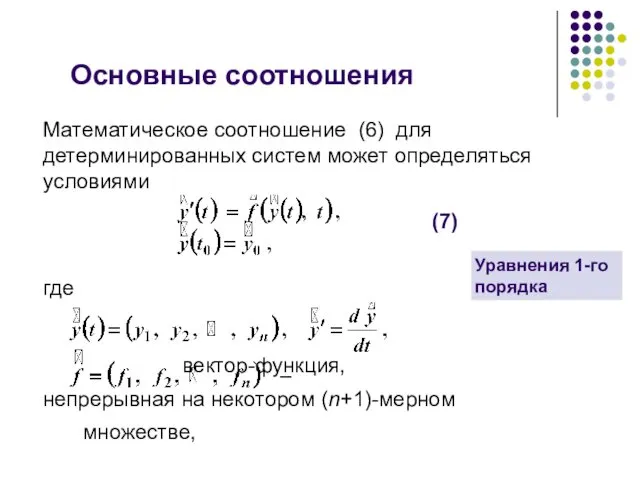
Математическое соотношение (6) для детерминированных систем может определяться условиями
где
вектор-функция, непрерывная на
Математическое соотношение (6) для детерминированных систем может определяться условиями
где
вектор-функция, непрерывная на
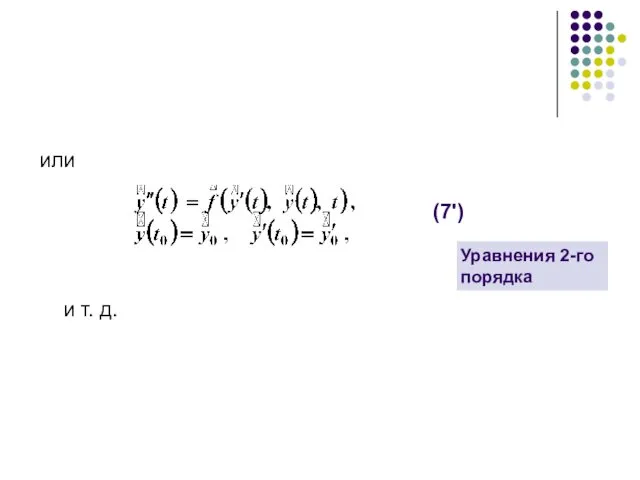
или
и т. д.
Уравнения 2-го порядка
или
и т. д.
Уравнения 2-го порядка
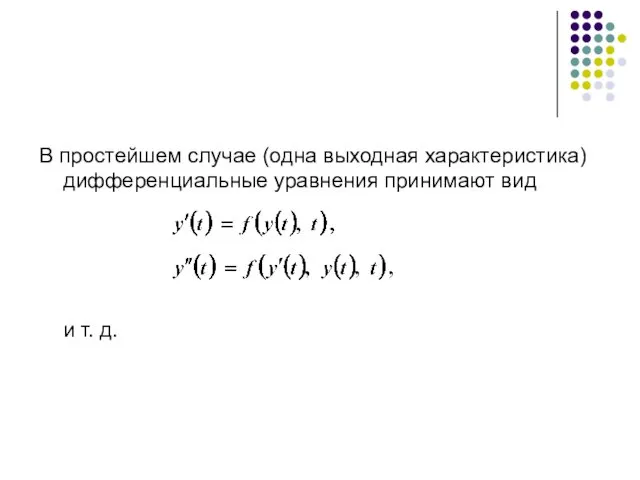
В простейшем случае (одна выходная характеристика) дифференциальные уравнения принимают вид
и т.
В простейшем случае (одна выходная характеристика) дифференциальные уравнения принимают вид
и т.
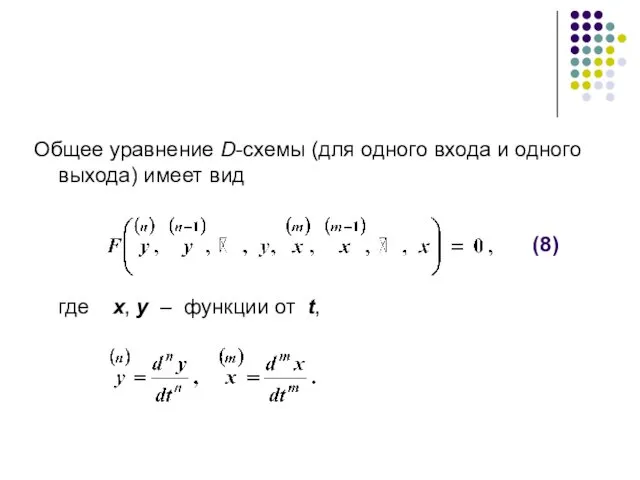
Общее уравнение D-схемы (для одного входа и одного выхода) имеет вид
где
где
Схемы вида (7) – (8) отражают динамику изучаемой системы (поведение во
Схемы вида (7) – (8) отражают динамику изучаемой системы (поведение во
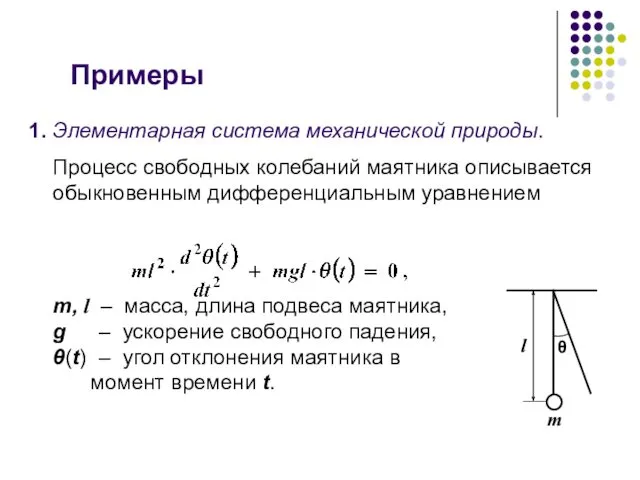
1. Элементарная система механической природы.
Процесс свободных колебаний маятника описывается обыкновенным дифференциальным
1. Элементарная система механической природы.
Процесс свободных колебаний маятника описывается обыкновенным дифференциальным
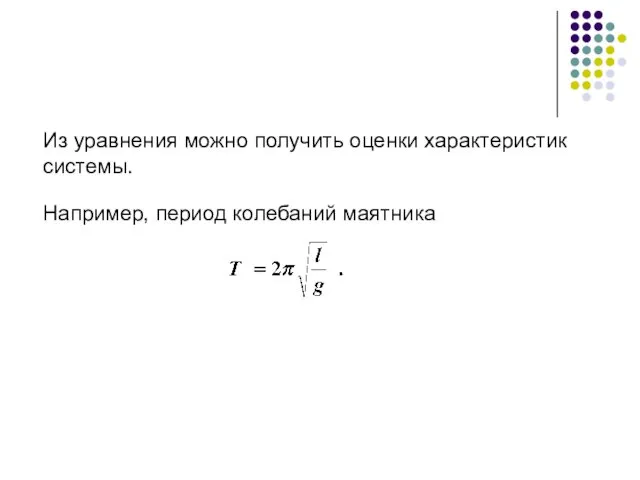
Из уравнения можно получить оценки характеристик системы.
Например, период колебаний маятника
Из уравнения можно получить оценки характеристик системы.
Например, период колебаний маятника
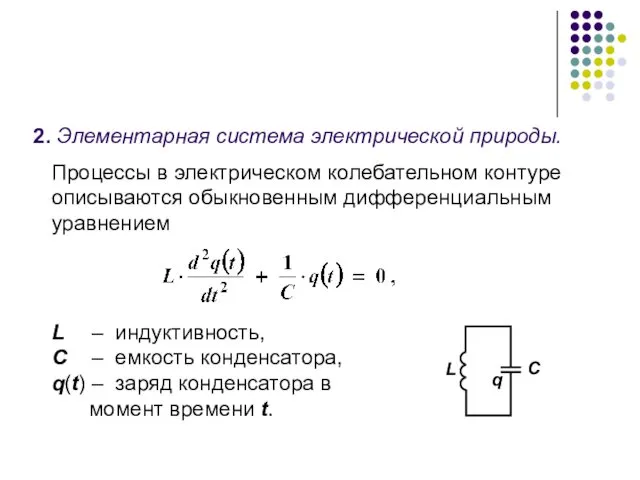
2. Элементарная система электрической природы.
Процессы в электрическом колебательном контуре описываются
2. Элементарная система электрической природы.
Процессы в электрическом колебательном контуре описываются
Из уравнения можно получить оценки характеристик системы.
Например, период характеристических колебаний
Из уравнения можно получить оценки характеристик системы.
Например, период характеристических колебаний
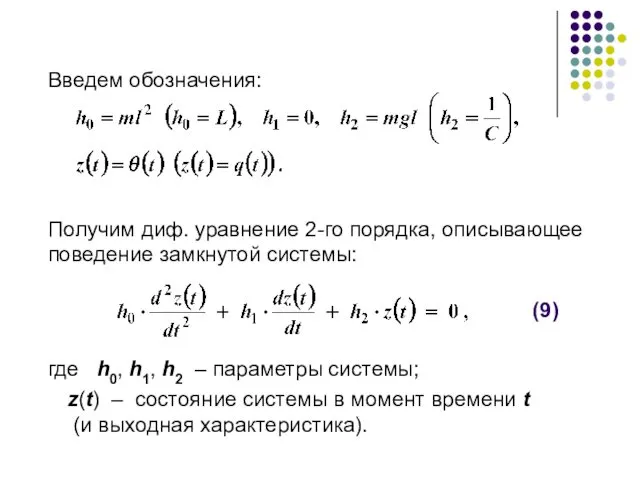
Введем обозначения:
Получим диф. уравнение 2-го порядка, описывающее поведение замкнутой системы:
где h0,
Введем обозначения:
Получим диф. уравнение 2-го порядка, описывающее поведение замкнутой системы:
где h0,
Выводы:
поведение двух рассмотренных выше систем разной природы может быть исследовано
Выводы:
поведение двух рассмотренных выше систем разной природы может быть исследовано
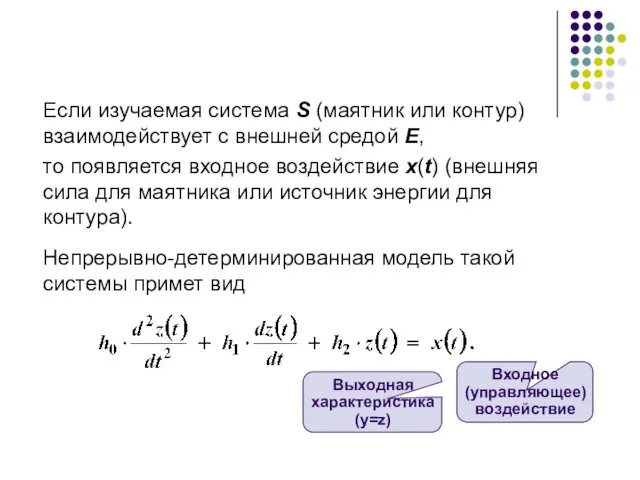
Если изучаемая система S (маятник или контур) взаимодействует с внешней средой
Если изучаемая система S (маятник или контур) взаимодействует с внешней средой
Возможные приложения (САУ)
Система управления (СУ) – это совокупность взаимодействующих между собой
Возможные приложения (САУ)
Система управления (СУ) – это совокупность взаимодействующих между собой
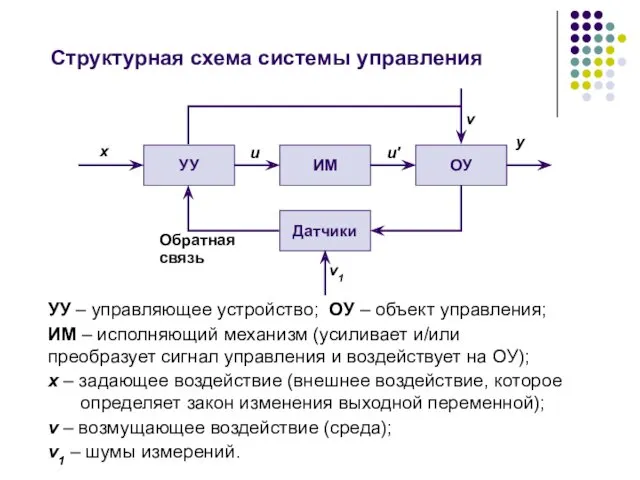
УУ – управляющее устройство; ОУ – объект управления;
ИМ – исполняющий механизм
УУ – управляющее устройство; ОУ – объект управления;
ИМ – исполняющий механизм
Основные задачи систем управления
Стабилизация системы – поддержание заданного режима работы,
Основные задачи систем управления
Стабилизация системы – поддержание заданного режима работы,
Выполнение программы – управление по заранее заданной программе (задающее воздействие
Выполнение программы – управление по заранее заданной программе (задающее воздействие
Слежение за неизвестным задающим сигналом.
Задающее воздействие заранее неизвестно и определяется
Слежение за неизвестным задающим сигналом.
Задающее воздействие заранее неизвестно и определяется
В САУ управление объектом осуществляется без непосредственного участия человека автоматическими устройствами
В САУ управление объектом осуществляется без непосредственного участия человека автоматическими устройствами
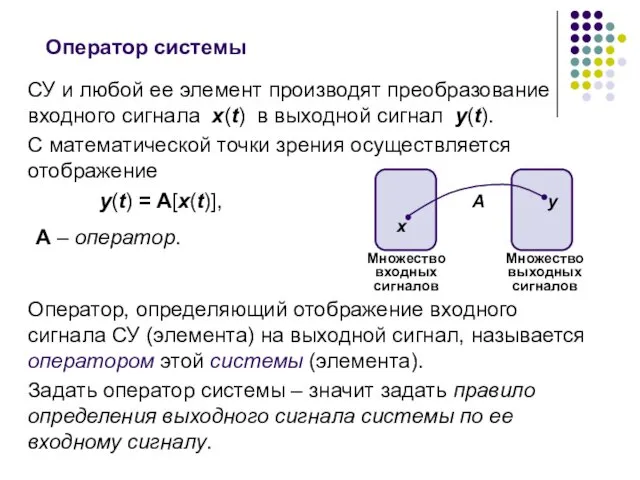
СУ и любой ее элемент производят преобразование входного сигнала x(t) в
СУ и любой ее элемент производят преобразование входного сигнала x(t) в
Примеры.
Оператор интегрирования
Описывает, например, наполнение пустого бака водой. Если сечение бака S
Примеры.
Оператор интегрирования
Описывает, например, наполнение пустого бака водой. Если сечение бака S
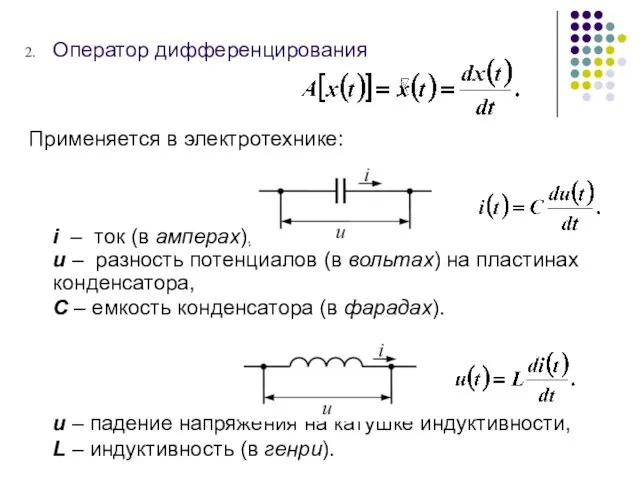
Оператор дифференцирования
Применяется в электротехнике:
i – ток (в амперах),
и – разность
Оператор дифференцирования
Применяется в электротехнике:
i – ток (в амперах),
и – разность
Звено – это математическая модель системы или любой ее подсистемы, определяемой
Звено – это математическая модель системы или любой ее подсистемы, определяемой
По виду операторов, которыми описывается СУ, системы подразделяют на
линейные (все звенья
По виду операторов, которыми описывается СУ, системы подразделяют на
линейные (все звенья
После линеаризации непрерывная СУ с одним входом х и одним выходом
После линеаризации непрерывная СУ с одним входом х и одним выходом
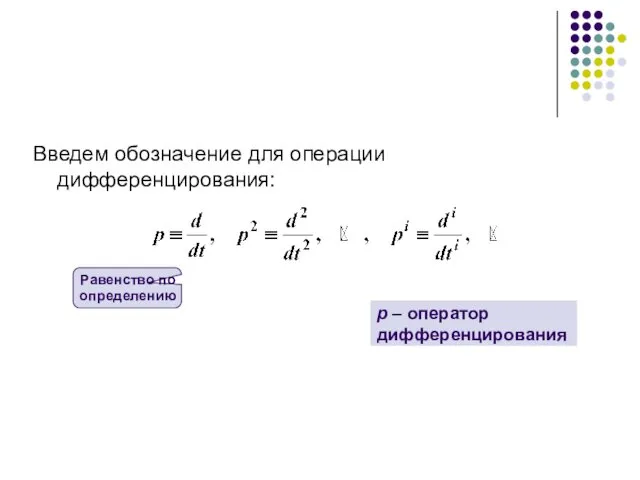
Введем обозначение для операции дифференцирования:
Равенство по определению
p – оператор
дифференцирования
Введем обозначение для операции дифференцирования:
Равенство по определению
p – оператор
дифференцирования
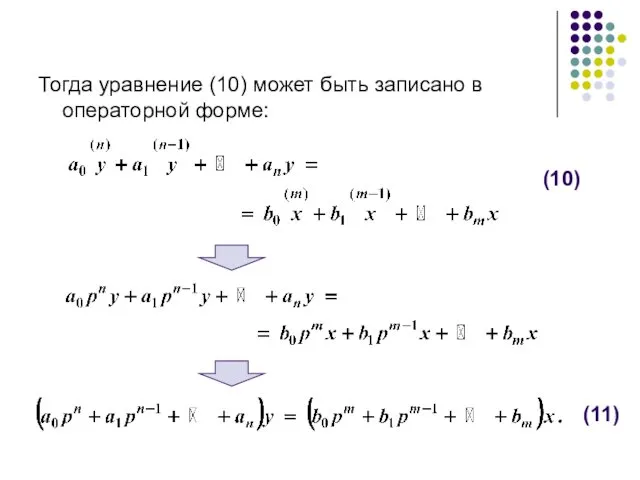
Тогда уравнение (10) может быть записано в операторной форме:
Тогда уравнение (10) может быть записано в операторной форме:
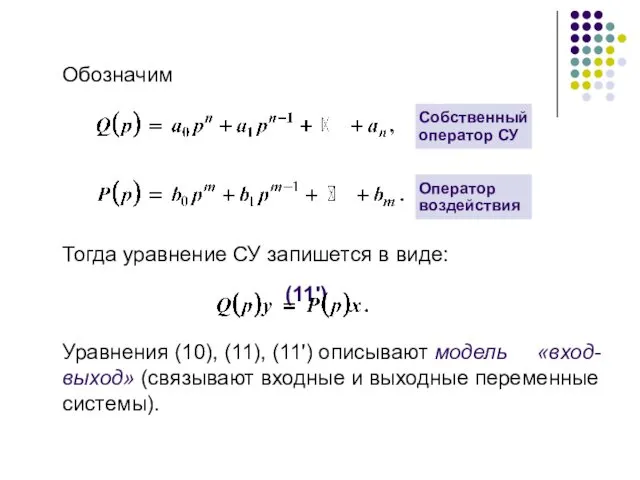
Обозначим
Тогда уравнение СУ запишется в виде:
(11')
Уравнения (10), (11), (11') описывают
Обозначим
Тогда уравнение СУ запишется в виде:
(11')
Уравнения (10), (11), (11') описывают
Передаточные функции
Передаточной функцией называется отношение оператора воздействия к собственному оператору.
Степень многочлена
Передаточные функции
Передаточной функцией называется отношение оператора воздействия к собственному оператору.
Степень многочлена
Запись уравнения СУ (звена) с помощью передаточной функции:
Передаточные функции полностью описывают
Запись уравнения СУ (звена) с помощью передаточной функции:
Передаточные функции полностью описывают
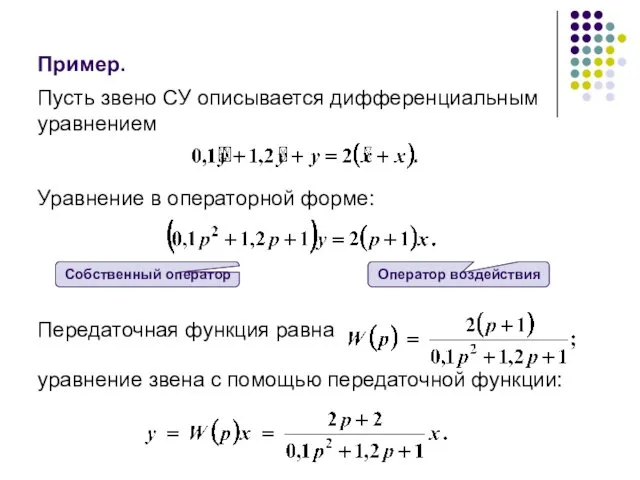
Пример.
Пусть звено СУ описывается дифференциальным уравнением
Уравнение в операторной форме:
Передаточная функция равна
уравнение
Пример.
Пусть звено СУ описывается дифференциальным уравнением
Уравнение в операторной форме:
Передаточная функция равна
уравнение
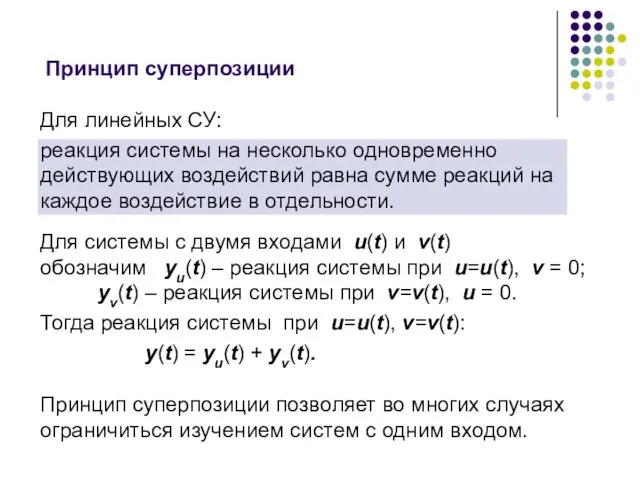
Принцип суперпозиции
Для линейных СУ:
реакция системы на несколько одновременно действующих воздействий равна
Принцип суперпозиции
Для линейных СУ:
реакция системы на несколько одновременно действующих воздействий равна
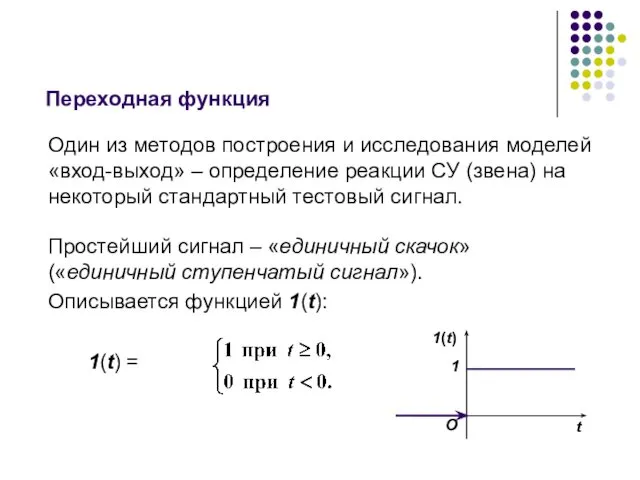
Переходная функция
Один из методов построения и исследования моделей «вход-выход» – определение
Переходная функция
Один из методов построения и исследования моделей «вход-выход» – определение
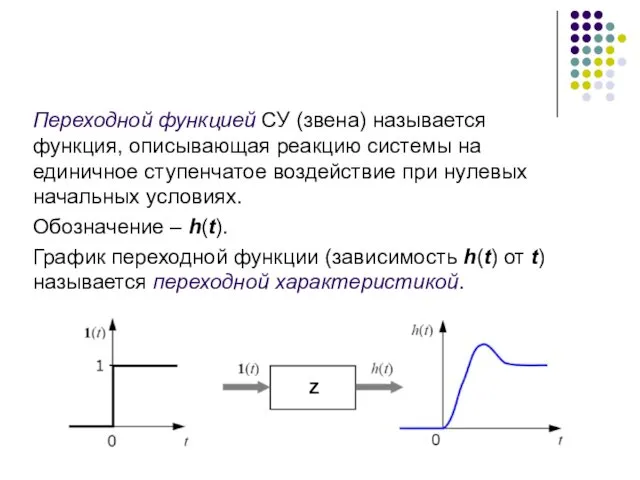
Переходной функцией СУ (звена) называется функция, описывающая реакцию системы на единичное
Переходной функцией СУ (звена) называется функция, описывающая реакцию системы на единичное
Пример.
Пусть звено описывается диф. уравнением 1-го порядка
Решение уравнения при х(t) =
Пример.
Пусть звено описывается диф. уравнением 1-го порядка
Решение уравнения при х(t) =
Структурные схемы
Структурной схемой СУ называется графическое представление ее математической модели в
Структурные схемы
Структурной схемой СУ называется графическое представление ее математической модели в
Изображение сумматоров.
суммирование: вычитание:
Если перед входом стоит «–», то переменная по
Изображение сумматоров.
суммирование: вычитание:
Если перед входом стоит «–», то переменная по
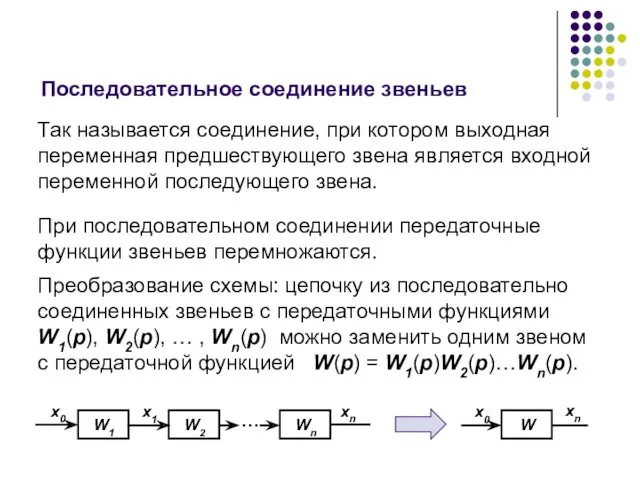
Последовательное соединение звеньев
Так называется соединение, при котором выходная переменная предшествующего звена
Последовательное соединение звеньев
Так называется соединение, при котором выходная переменная предшествующего звена
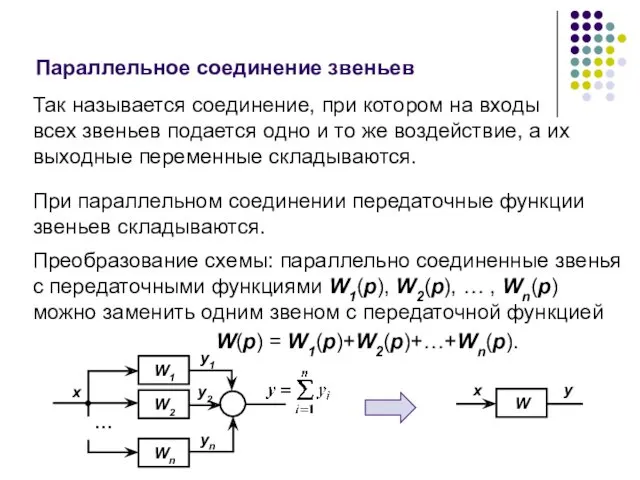
Параллельное соединение звеньев
Так называется соединение, при котором на входы всех звеньев
Параллельное соединение звеньев
Так называется соединение, при котором на входы всех звеньев
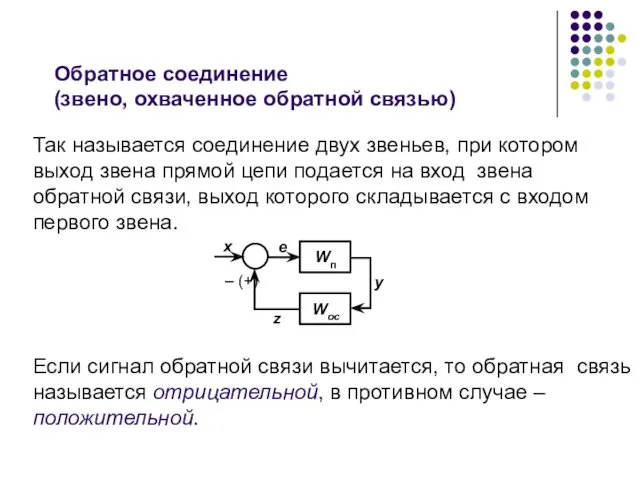
Обратное соединение
(звено, охваченное обратной связью)
Так называется соединение двух звеньев, при
Обратное соединение
(звено, охваченное обратной связью)
Так называется соединение двух звеньев, при
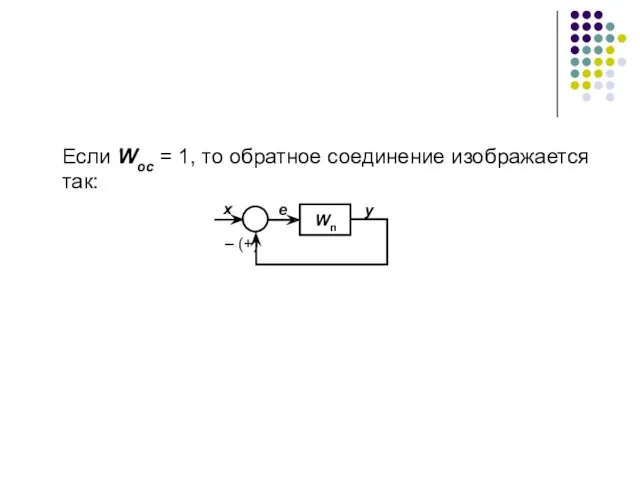
Если Wос = 1, то обратное соединение изображается так:
Если Wос = 1, то обратное соединение изображается так:
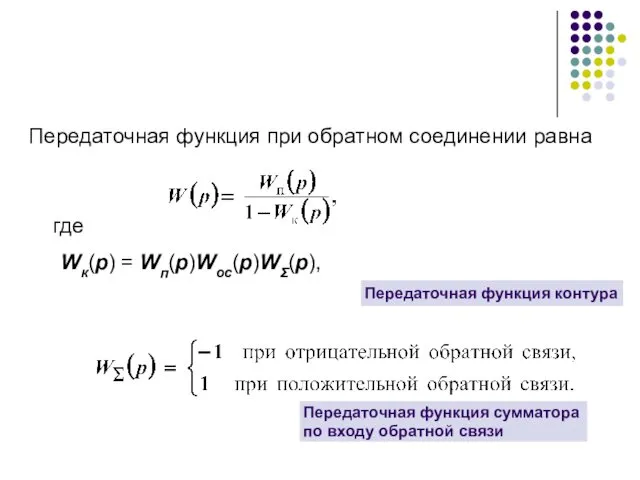
Передаточная функция при обратном соединении равна
где
Wк(р) = Wп(р)Wос(р)WΣ(р),
Передаточная функция
Передаточная функция при обратном соединении равна
где
Wк(р) = Wп(р)Wос(р)WΣ(р),
Передаточная функция
Пример.
Передаточная функция прямой цепи относительно входа x и выхода y: Wп
Пример.
Передаточная функция прямой цепи относительно входа x и выхода y: Wп
Анализ непрерывных САУ
Включает
исследование системы на устойчивость;
исследование качества управления в переходном и
Анализ непрерывных САУ
Включает
исследование системы на устойчивость;
исследование качества управления в переходном и
Устойчивость – одно из основных требований к САУ.
Требуется:
путем выбора структуры и
Устойчивость – одно из основных требований к САУ.
Требуется:
путем выбора структуры и
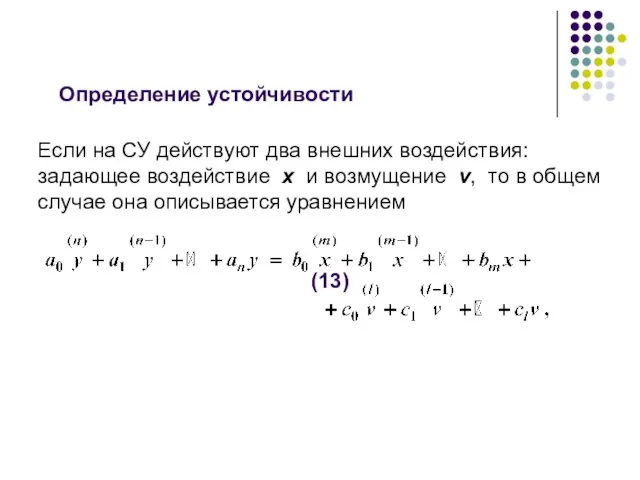
Если на СУ действуют два внешних воздействия: задающее воздействие x и
Если на СУ действуют два внешних воздействия: задающее воздействие x и
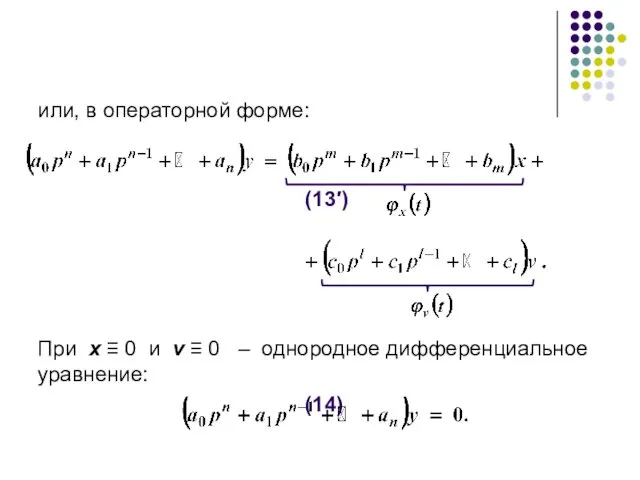
или, в операторной форме:
(13′)
При x ≡ 0 и v ≡ 0
или, в операторной форме:
(13′)
При x ≡ 0 и v ≡ 0
Назначение СУ – поддержание заданного режима, называемого невозмущенным движением.
Если на систему
Назначение СУ – поддержание заданного режима, называемого невозмущенным движением.
Если на систему
Невозмущенное движение называется асимптотически устойчивым, если после окончания действия возмущения возмущенное
Невозмущенное движение называется асимптотически устойчивым, если после окончания действия возмущения возмущенное
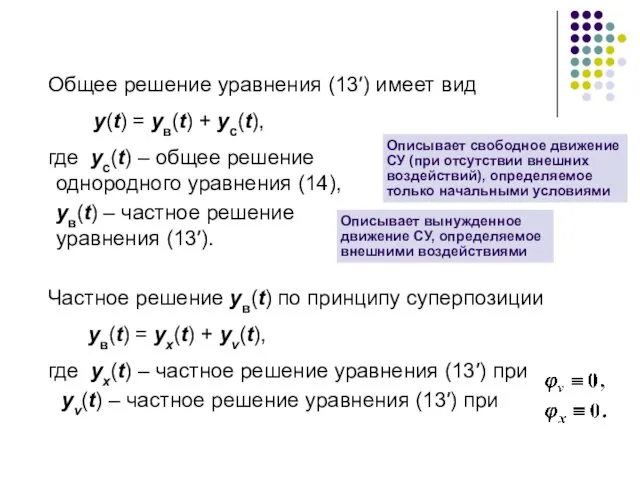
Общее решение уравнения (13′) имеет вид
y(t) = yв(t) + yс(t),
где
Общее решение уравнения (13′) имеет вид
y(t) = yв(t) + yс(t),
где
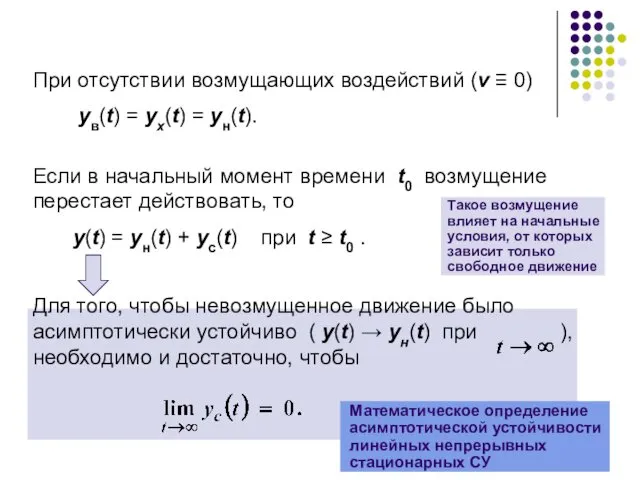
При отсутствии возмущающих воздействий (v ≡ 0)
yв(t) = yx(t) =
При отсутствии возмущающих воздействий (v ≡ 0)
yв(t) = yx(t) =
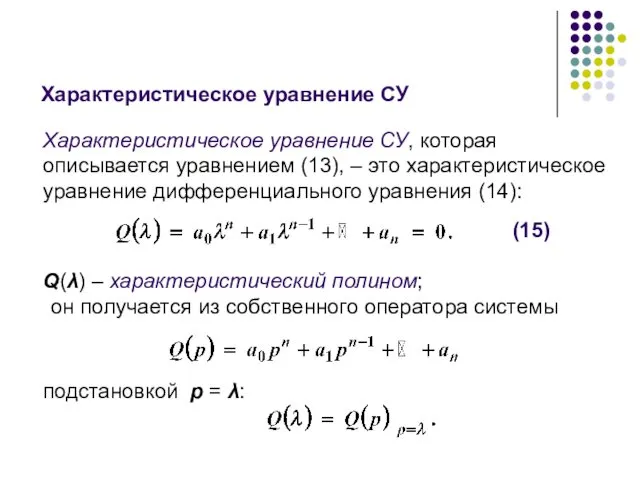
Характеристическое уравнение СУ
Характеристическое уравнение СУ, которая описывается уравнением (13), – это
Характеристическое уравнение СУ
Характеристическое уравнение СУ, которая описывается уравнением (13), – это
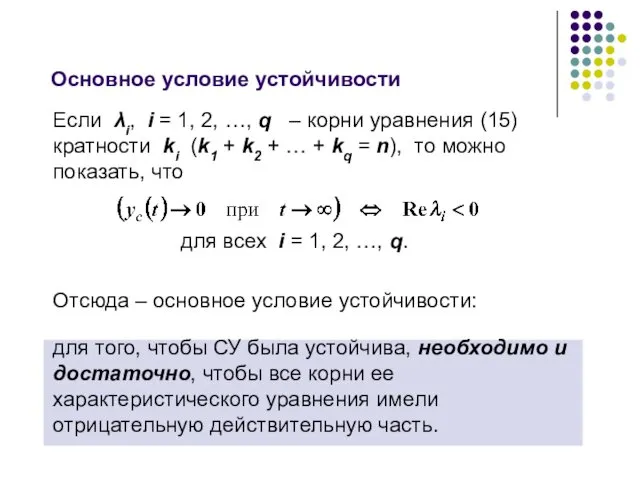
Если λi, i = 1, 2, …, q – корни уравнения
Если λi, i = 1, 2, …, q – корни уравнения
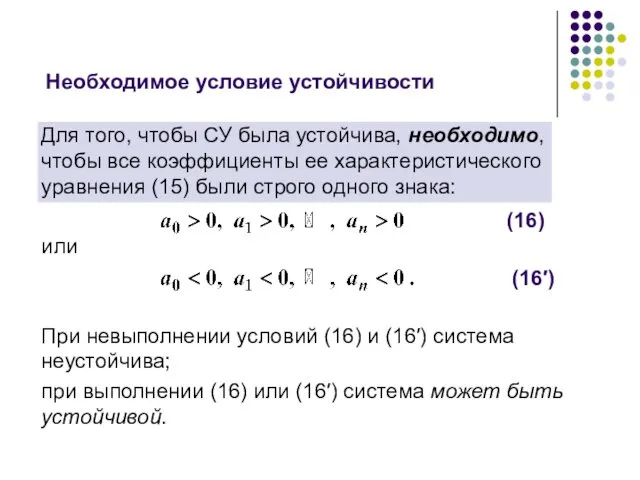
Необходимое условие устойчивости
Для того, чтобы СУ была устойчива, необходимо, чтобы все
Необходимое условие устойчивости
Для того, чтобы СУ была устойчива, необходимо, чтобы все
Алгебраические критерии устойчивости
Это проверка условий, накладываемых на коэффициенты характеристического уравнения (полинома).
В
Алгебраические критерии устойчивости
Это проверка условий, накладываемых на коэффициенты характеристического уравнения (полинома).
В
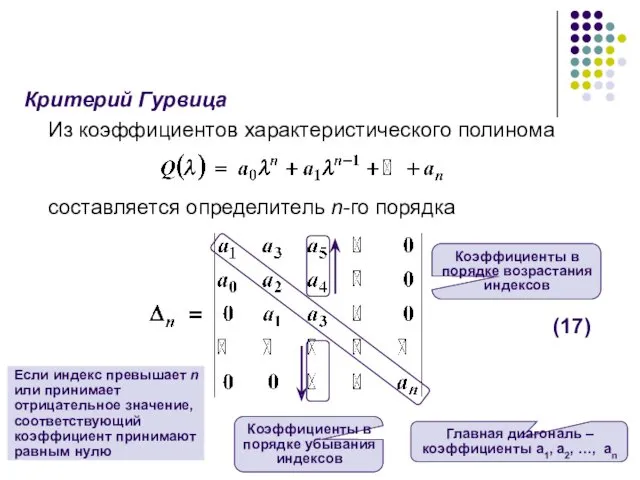
Критерий Гурвица
Из коэффициентов характеристического полинома
составляется определитель n-го порядка
Если индекс превышает n
Критерий Гурвица
Из коэффициентов характеристического полинома
составляется определитель n-го порядка
Если индекс превышает n
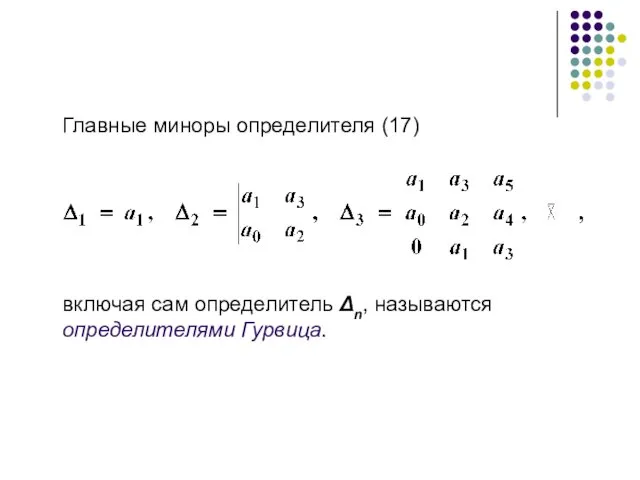
Главные миноры определителя (17)
включая сам определитель Δn, называются определителями Гурвица.
Главные миноры определителя (17)
включая сам определитель Δn, называются определителями Гурвица.
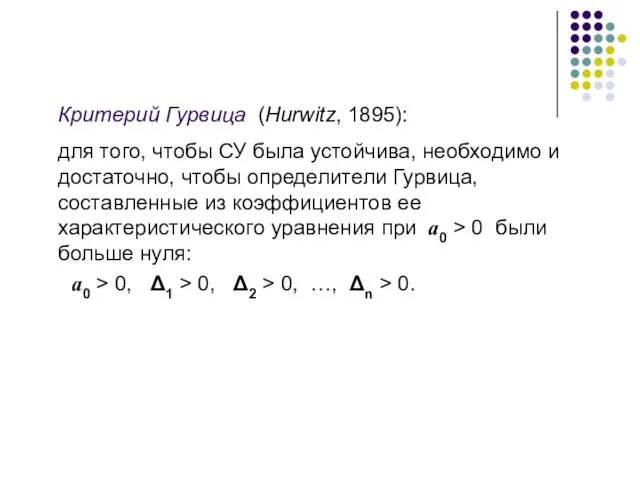
Критерий Гурвица (Hurwitz, 1895):
для того, чтобы СУ была устойчива, необходимо и
Критерий Гурвица (Hurwitz, 1895):
для того, чтобы СУ была устойчива, необходимо и
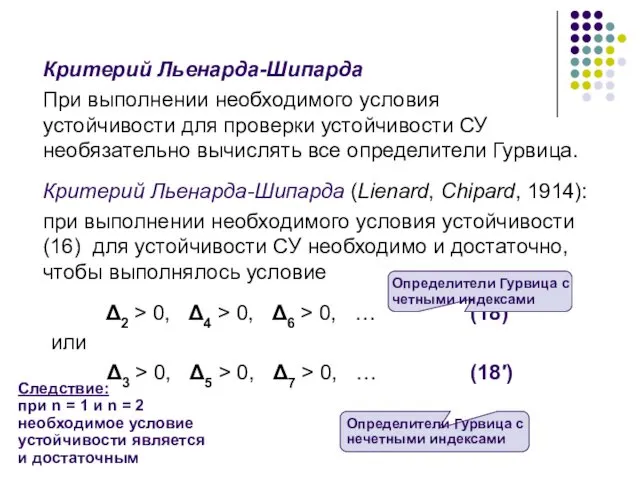
Критерий Льенарда-Шипарда
При выполнении необходимого условия
устойчивости для проверки устойчивости СУ необязательно
Критерий Льенарда-Шипарда
При выполнении необходимого условия
устойчивости для проверки устойчивости СУ необязательно
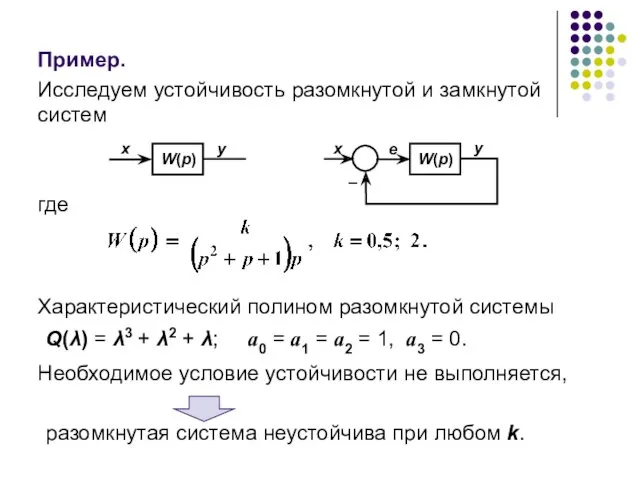
Пример.
Исследуем устойчивость разомкнутой и замкнутой систем
где
Характеристический полином разомкнутой системы
Q(λ) = λ3
Пример.
Исследуем устойчивость разомкнутой и замкнутой систем
где
Характеристический полином разомкнутой системы
Q(λ) = λ3
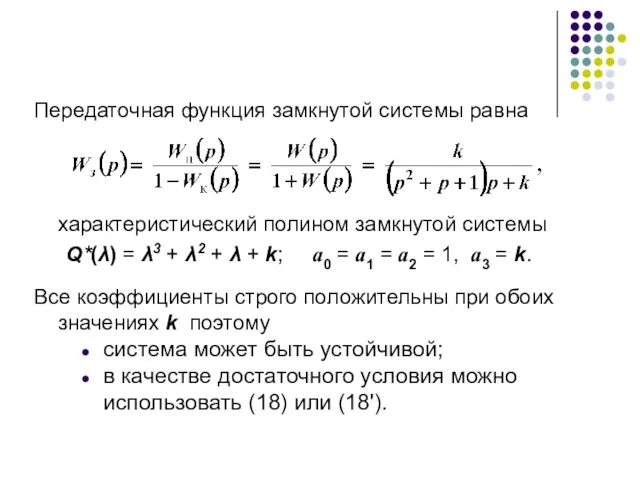
Передаточная функция замкнутой системы равна
характеристический полином замкнутой системы
Q*(λ) = λ3 +
Передаточная функция замкнутой системы равна
характеристический полином замкнутой системы
Q*(λ) = λ3 +
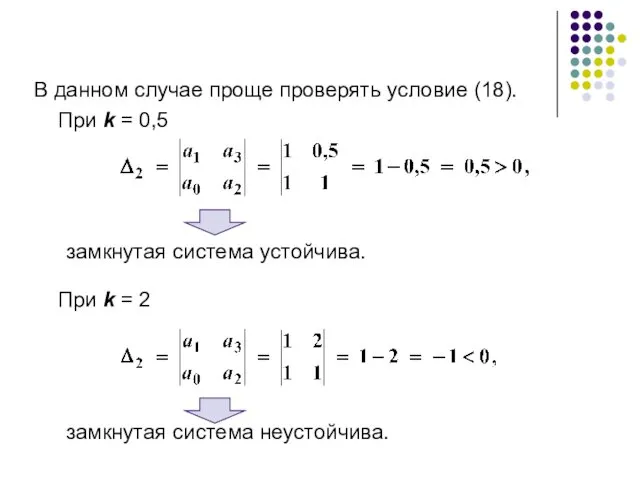
В данном случае проще проверять условие (18).
При k = 0,5
замкнутая система
В данном случае проще проверять условие (18).
При k = 0,5
замкнутая система
Определение области устойчивости
При заданной структуре (состав элементов и связи между ними)
Определение области устойчивости
При заданной структуре (состав элементов и связи между ними)
Если существуют такие значения варьируемых параметров, при которых система устойчива (существует
Если существуют такие значения варьируемых параметров, при которых система устойчива (существует
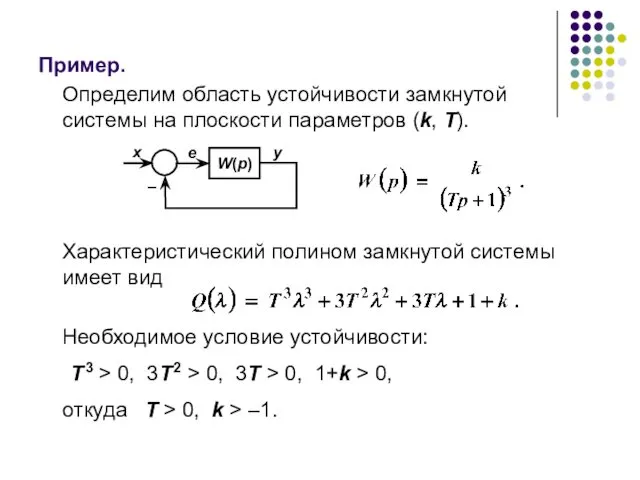
Пример.
Определим область устойчивости замкнутой системы на плоскости параметров (k, T).
Характеристический полином
Пример.
Определим область устойчивости замкнутой системы на плоскости параметров (k, T).
Характеристический полином
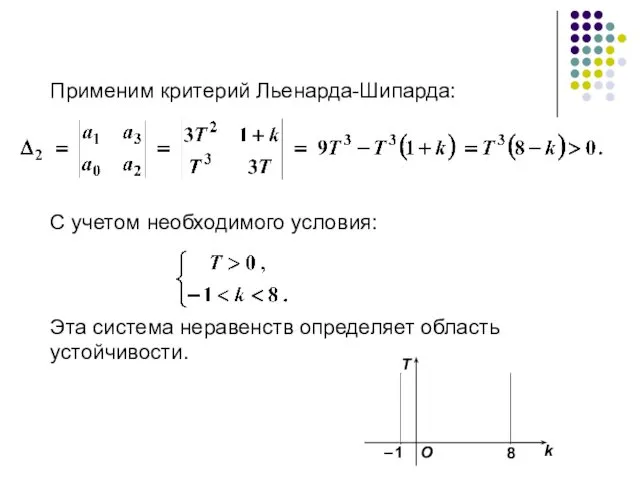
Применим критерий Льенарда-Шипарда:
С учетом необходимого условия:
Эта система неравенств определяет область
Применим критерий Льенарда-Шипарда:
С учетом необходимого условия:
Эта система неравенств определяет область
Показатели качества СУ
Под качеством системы управления понимается совокупность показателей, которые прямо
Показатели качества СУ
Под качеством системы управления понимается совокупность показателей, которые прямо
Наиболее полная характеристика качества СУ – ошибка
е(t) = x(t) –
Наиболее полная характеристика качества СУ – ошибка
е(t) = x(t) –
Показатели качества:
в переходном режиме;
в установившемся режиме.
Показатели качества как характеристики свойств системы
Показатели качества:
в переходном режиме;
в установившемся режиме.
Показатели качества как характеристики свойств системы
Прямые показатели качества в переходном режиме
Типовое воздействие – ступенчатое воздействие А∙1(t).
Обычно
Прямые показатели качества в переходном режиме
Типовое воздействие – ступенчатое воздействие А∙1(t).
Обычно
Прямые показатели качества – это показатели, которые получаются непосредственно по переходной
Прямые показатели качества – это показатели, которые получаются непосредственно по переходной
Время регулирования.
Временем регулирования tp называется минимальное время (с момента подачи ступенчатого
Время регулирования.
Временем регулирования tp называется минимальное время (с момента подачи ступенчатого
Определение времени регулирования по переходной характеристике:
tp – значение t, при
котором
Определение времени регулирования по переходной характеристике:
tp – значение t, при
котором
Перерегулирование.
Перерегулирование σ определяется следующим образом:
где hm – максимальное значение переходной функции.
Это
Перерегулирование.
Перерегулирование σ определяется следующим образом:
где hm – максимальное значение переходной функции.
Это
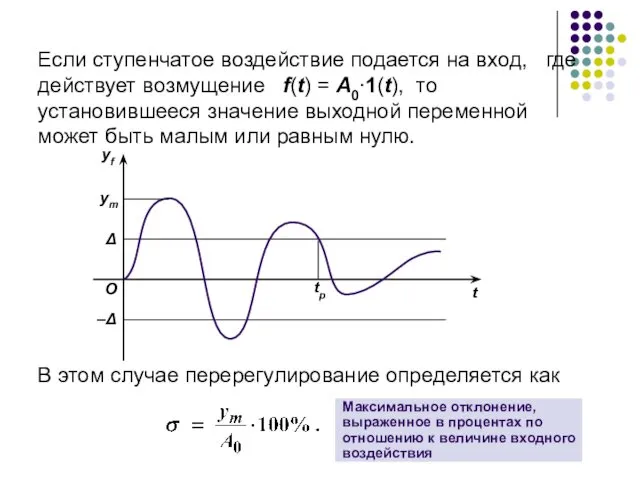
Если ступенчатое воздействие подается на вход, где действует возмущение f(t) =
Если ступенчатое воздействие подается на вход, где действует возмущение f(t) =
Другие прямые показатели
Число колебаний за время регулирования tp.
Обозначение – Nk.
Можно рассматривать
Другие прямые показатели
Число колебаний за время регулирования tp.
Обозначение – Nk.
Можно рассматривать
Общая модель САУ
В общем случае САУ описывается следующими величинами.
Эндогенные переменные:
– вектор
Общая модель САУ
В общем случае САУ описывается следующими величинами.
Эндогенные переменные:
– вектор
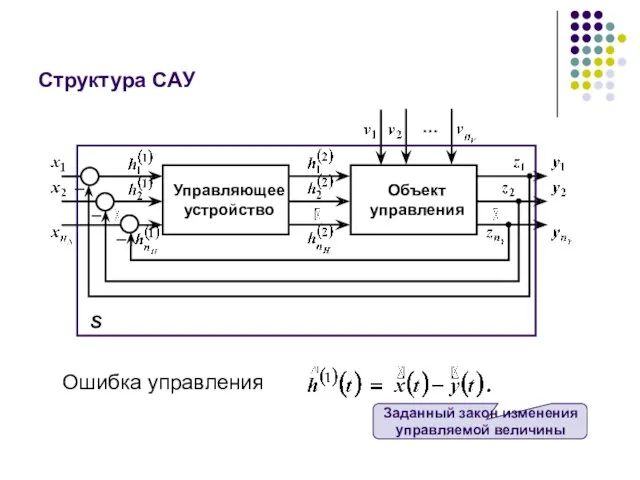
Структура САУ
Ошибка управления
Структура САУ
Ошибка управления
При проектировании и эксплуатации САУ –
выбор параметров системы S, которые
При проектировании и эксплуатации САУ –
выбор параметров системы S, которые
 Cәләтле балаларны үстерү
Cәләтле балаларны үстерү Организация участка по ремонту и настройке топливной аппаратуры дизельных двигателей
Организация участка по ремонту и настройке топливной аппаратуры дизельных двигателей Физическая викторина 7-8 классы.
Физическая викторина 7-8 классы. Основні уявлення про силу, момент сили
Основні уявлення про силу, момент сили Физические основы магнитного метода контроля
Физические основы магнитного метода контроля Электротехническое материаловедение
Электротехническое материаловедение Электромагнитные колебания и волны. Разбор задач ЕГЭ
Электромагнитные колебания и волны. Разбор задач ЕГЭ Улаштування та технічне обслуговування гальм з гідроприводом. Влаштування та ТО гальм з пневмоприводом (8)
Улаштування та технічне обслуговування гальм з гідроприводом. Влаштування та ТО гальм з пневмоприводом (8) Физическая игра Счастливый случай. 8 класс
Физическая игра Счастливый случай. 8 класс Виды электрических схем и их компонентов
Виды электрических схем и их компонентов конспект урока по теме Мир элементарных частиц
конспект урока по теме Мир элементарных частиц Испарение и конденсация
Испарение и конденсация Тема: Взаємодія тіл. Виштовхувальна сила. Закон Архімеда
Тема: Взаємодія тіл. Виштовхувальна сила. Закон Архімеда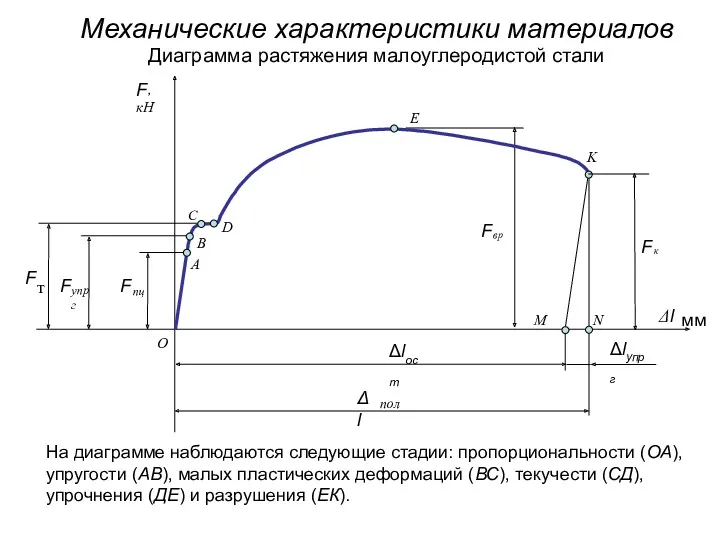 Механические характеристики материалов
Механические характеристики материалов Экспериментальное исследование явления поляризации света
Экспериментальное исследование явления поляризации света Основное уравнение молекулярно-кинетической теории
Основное уравнение молекулярно-кинетической теории Зависимость ускорения свободного падения от длины нити маятника
Зависимость ускорения свободного падения от длины нити маятника Износостойкие материалы
Износостойкие материалы Проводниковые материалы
Проводниковые материалы 20230930_sila_treniya
20230930_sila_treniya Сила трения. Трение в природе и технике. 9 класс
Сила трения. Трение в природе и технике. 9 класс Көч – җисемнәрнең үзара тәэсир итешү үлчәме ул
Көч – җисемнәрнең үзара тәэсир итешү үлчәме ул Грузозахватные устройства и приспособления
Грузозахватные устройства и приспособления Инфракрасное излучение
Инфракрасное излучение O’zbekiston Respublikasi Oliy va o’rta maxsus ta’lim vazirligi
O’zbekiston Respublikasi Oliy va o’rta maxsus ta’lim vazirligi Ядерные реакии
Ядерные реакии Тепловые явления. 8 класс
Тепловые явления. 8 класс Проект дільниці механічної обробки пуансонотримача
Проект дільниці механічної обробки пуансонотримача