- Устойчивость точки покоя. (Лекция 4)

Содержание
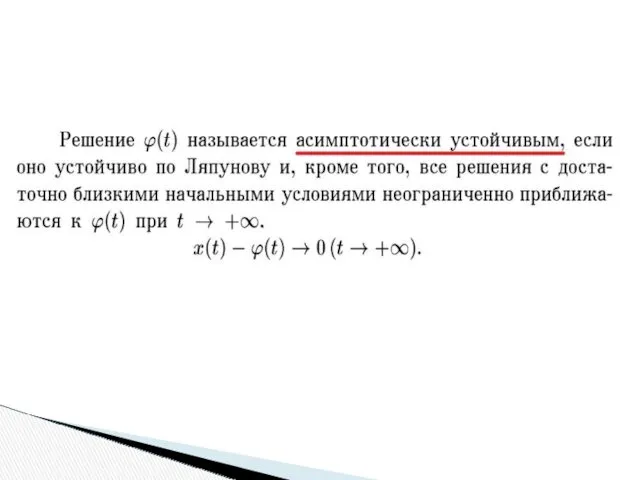
- 2. Математические определения устойчивости
- 4. Точки покоя системы
- 5. Устойчивость точки покоя
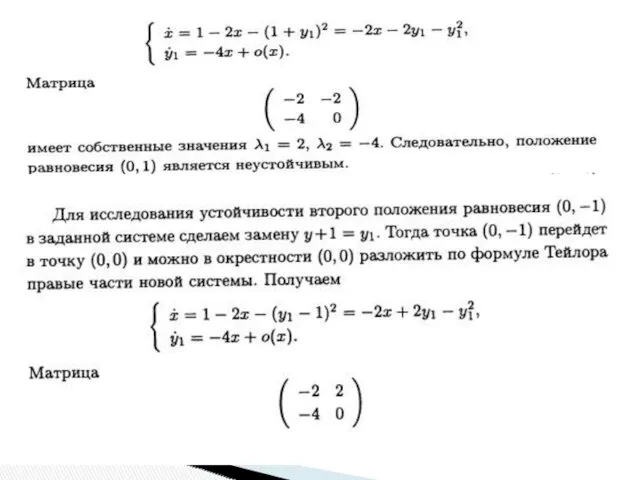
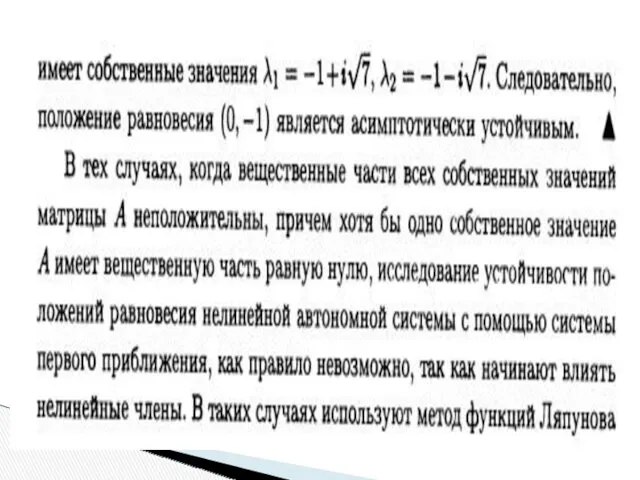
- 6. Пример расчета
- 9. Преобразование Лапласа
- 10. Свойства преобразования Лапласа
- 13. Таблица преобразований Лапласа
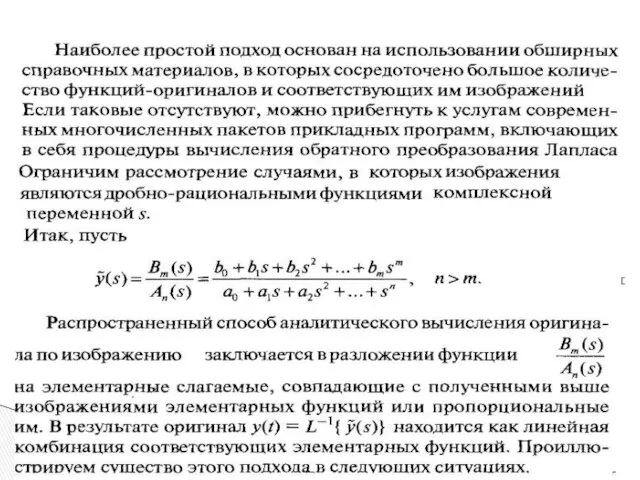
- 14. Восстановление оригиналов по изображениям
- 16. Примеры расчетов
- 17. Примеры расчетов
- 18. Использование преобразование Лапласа
- 19. Модель вход-выход an y(n)(t) + an-1 y(n-1) (t) + ... + a0 y (t) = bm
- 20. Модель вход-выход
- 21. Передаточная функция системы
- 22. Структурные соединения звеньев системы а) последовательное
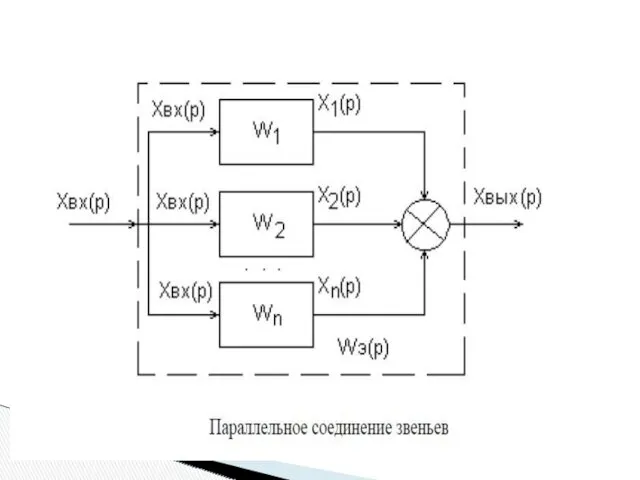
- 23. а) параллельное соединение
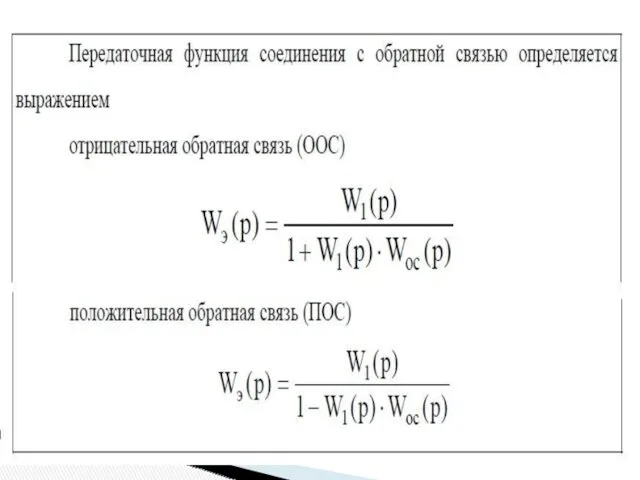
- 25. в) обратная связь
- 27. Правила структурных преобразований
- 28. Пример преобразования
- 30. Переходная функция системы
- 31. Импульсная переходная функция
- 32. Функция Хэвисайда и δ-функция
- 33. Исследование систем
- 34. Схема и типовые воздействия в САУ
- 35. Алгоритм исследование систем (САУ)
- 36. Типы основных звеньев
- 37. Частотные характеристики систем (САУ)
- 38. Представление частотных ПФ
- 39. Частотные характеристики отклика систем (САУ)
- 40. Характеристики звеньев: усилительное безинерционное звено
- 41. Апериодическое (усилительное инерционное) звено 1 порядка
- 42. Частотные характеристики
- 43. последовательное соединение двух апериодических звеньев первого порядка Апериодическое ( усилительное инерционное) звено 2 порядка
- 44. Колебательное звено (вариант предыдущего)
- 45. Консервативное звено при ξ = 0
- 46. Интегрирующее звено ∞
- 47. Дифференцирующее звено
- 48. Примеры использования звеньев на практике
- 49. Решение дифференциального уравнения Использование программных пакетов при расчете систем управления
- 50. LaplaceTransform[t*Sin[t],t,s] Ответ: (2 s)/(1+s^2)2 LaplaceTransform[DiracDelta[t],t,s] Ответ : 1/s LaplaceTransform[X''[t]-4*X'[t]+3*X[t],t,s]//TraditionalForm Ответ : s2 (Lt[X(t)](s))+3 (Lt[X(t)](s))-4 (s (Lt[X(t)](s))-X(0))-s
- 51. Использование преобразования Лапласа для построения передаточной функции
- 52. Нахождение передаточной функции для общей модели состояний системы
- 53. Одно уравнение x''[t]+A x'[t]+B x[t]=u[t] второго порядка эквивалентно системе из 2 уравнений первого порядка x'[t]=z[t] z'[t]=-A
- 54. Пример:получение передаточной функции из модели состояний системы
- 55. Входное воздействие l(t)-UnitStep[t] Выходная реакция- (функция Хэвисайда) переходная функция Нахождение переходной функции
- 56. Входное воздействие δ(t)-DiracDelta[t] Выходная реакция- импульсная функция Нахождение импульсной переходной функции
- 57. Входное воздействие Sin[4 t] Выходная реакция- гармонический отклик Нахождение отклика системы на гармоническое воздействие
- 58. один из способов судить об устойчивости замкнутой системы управления по АФЧХ её разомкнутого состояния. Если разомкнутая
- 60. Скачать презентацию
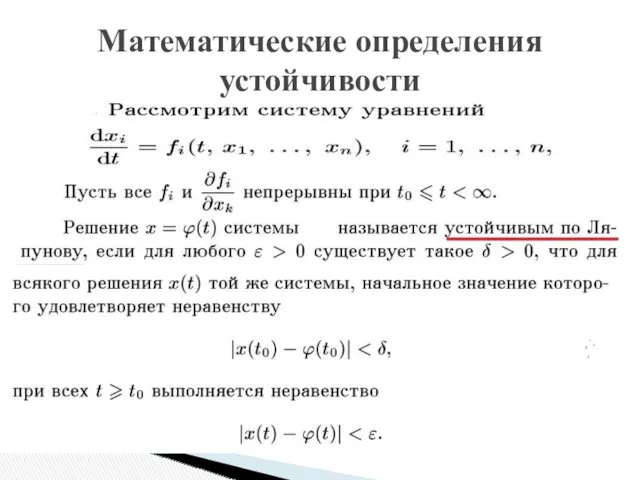
Математические определения
устойчивости
Математические определения
устойчивости
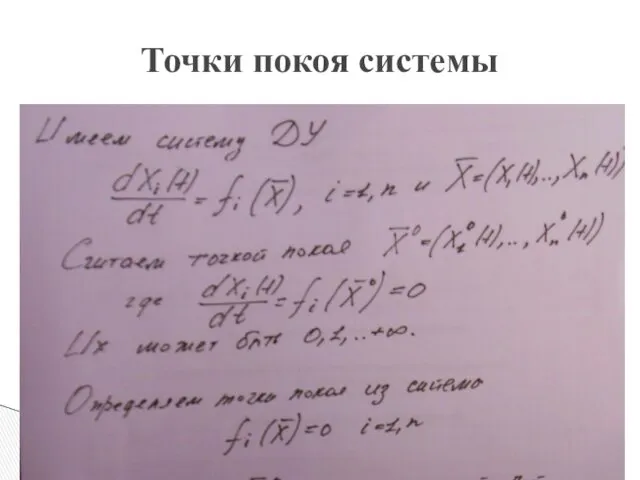
Точки покоя системы
Точки покоя системы
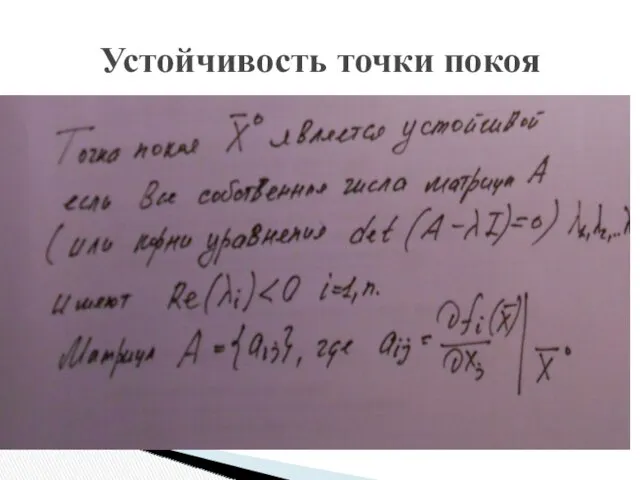
Устойчивость точки покоя
Устойчивость точки покоя
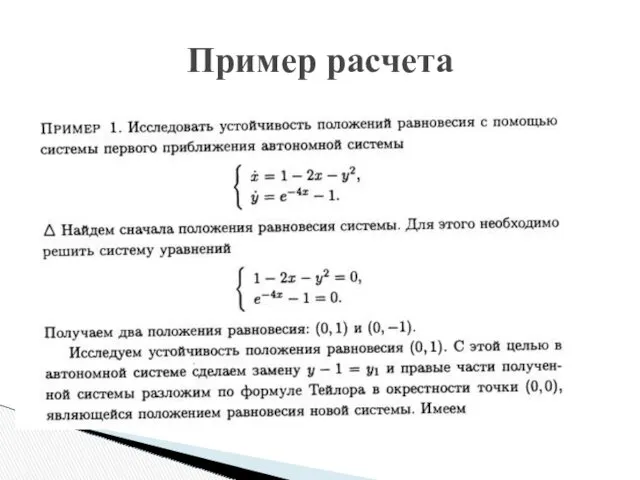
Пример расчета
Пример расчета
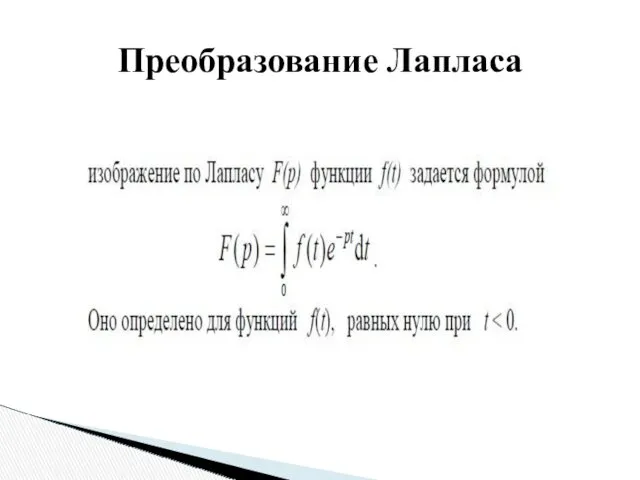
Преобразование Лапласа
Преобразование Лапласа
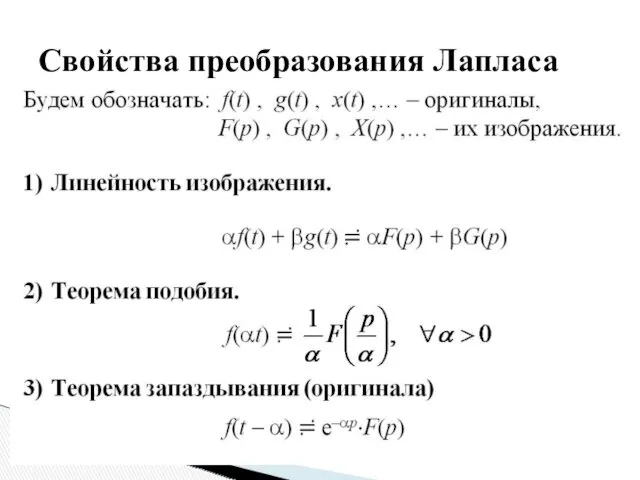
Свойства преобразования Лапласа
Свойства преобразования Лапласа
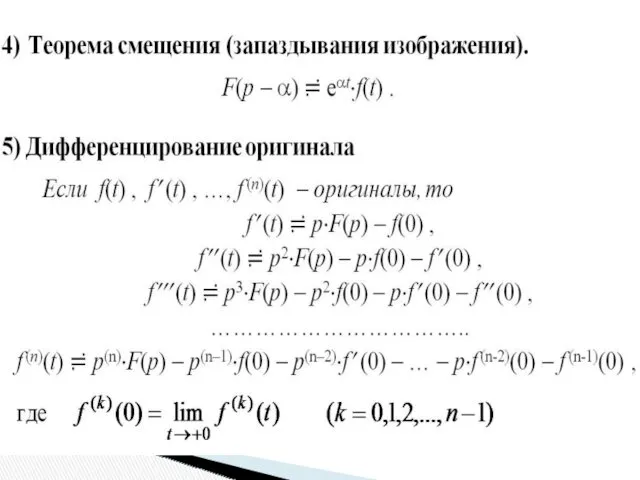
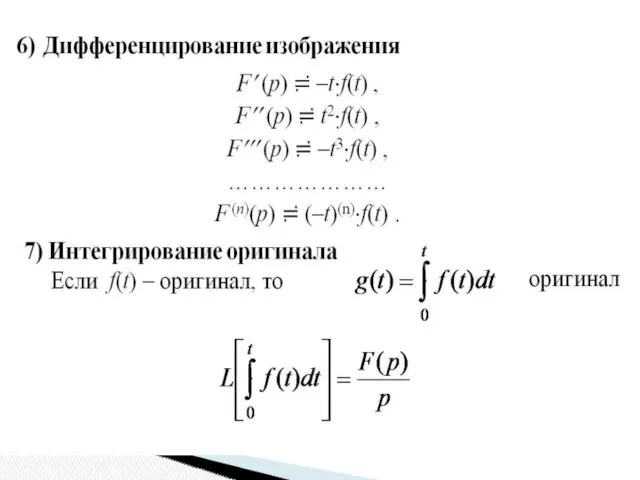
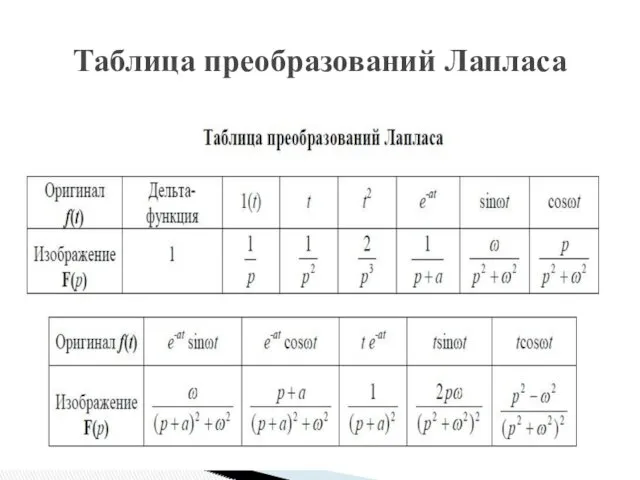
Таблица преобразований Лапласа
Таблица преобразований Лапласа
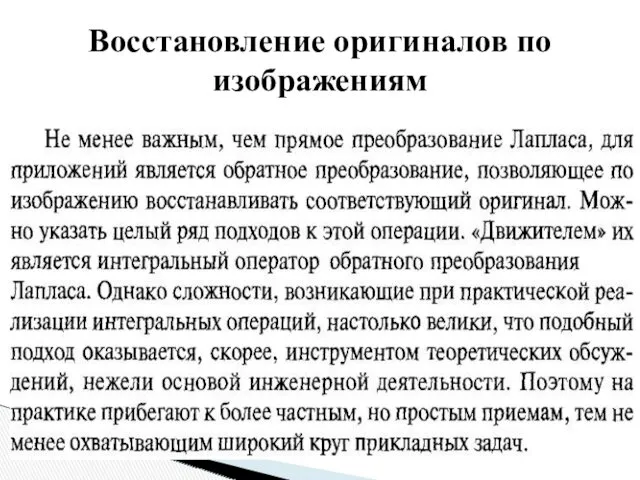
Восстановление оригиналов по
изображениям
Восстановление оригиналов по
изображениям
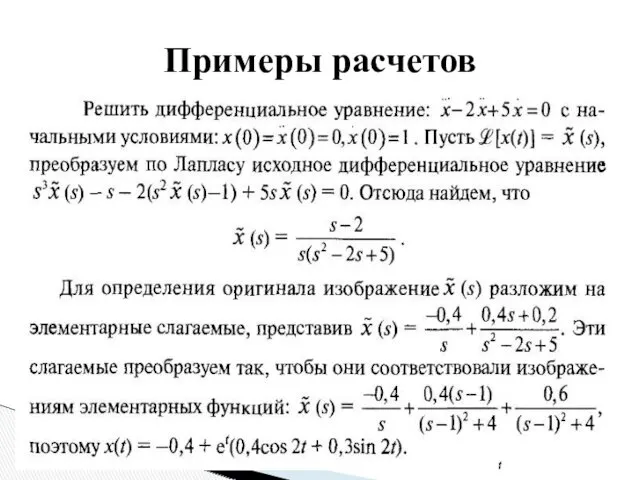
Примеры расчетов
Примеры расчетов
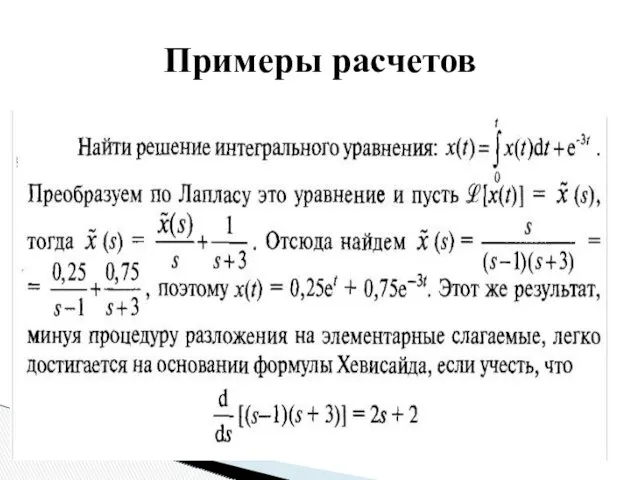
Примеры расчетов
Примеры расчетов

Использование преобразование
Лапласа
Использование преобразование
Лапласа
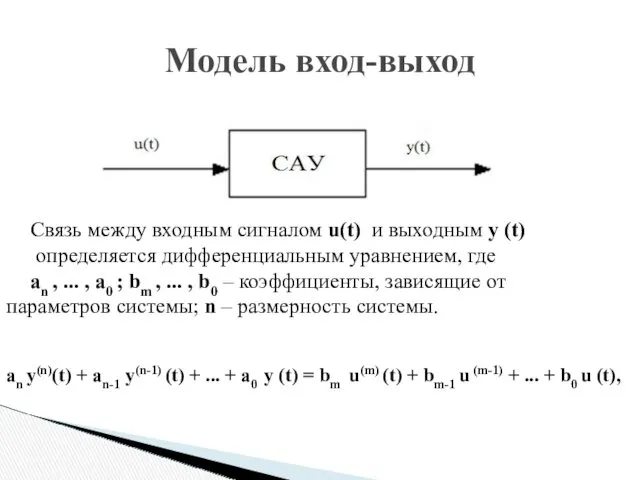
Модель вход-выход
an y(n)(t) + an-1 y(n-1) (t) + ... + a0
Модель вход-выход
an y(n)(t) + an-1 y(n-1) (t) + ... + a0
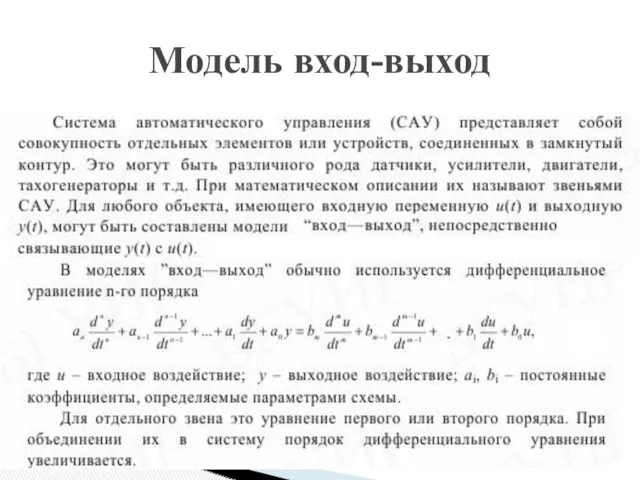
Модель вход-выход
Модель вход-выход
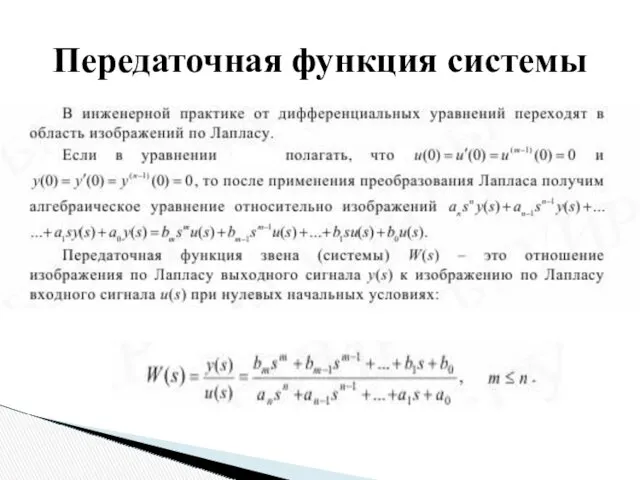
Передаточная функция системы
Передаточная функция системы
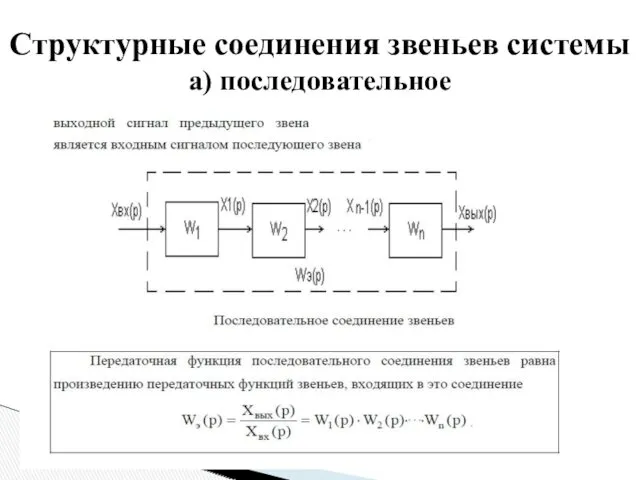
Структурные соединения звеньев системы
а) последовательное
Структурные соединения звеньев системы
а) последовательное
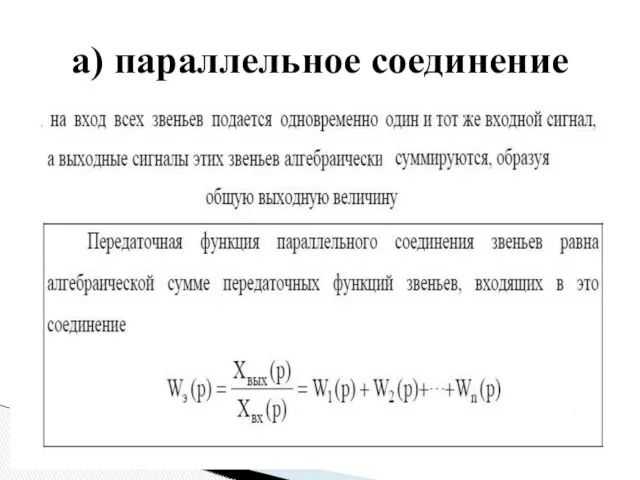
а) параллельное соединение
а) параллельное соединение
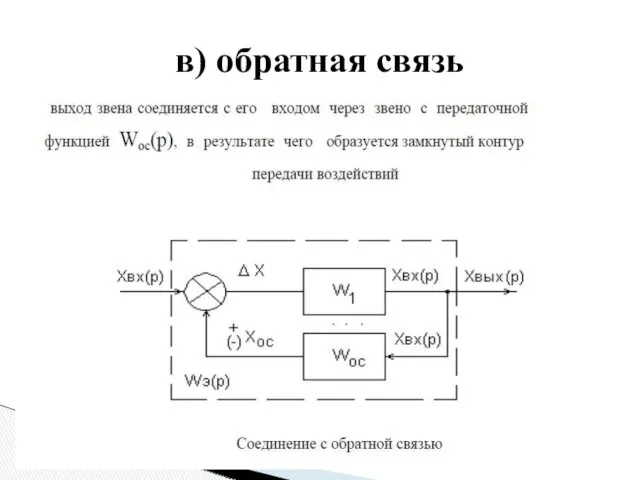
в) обратная связь
в) обратная связь
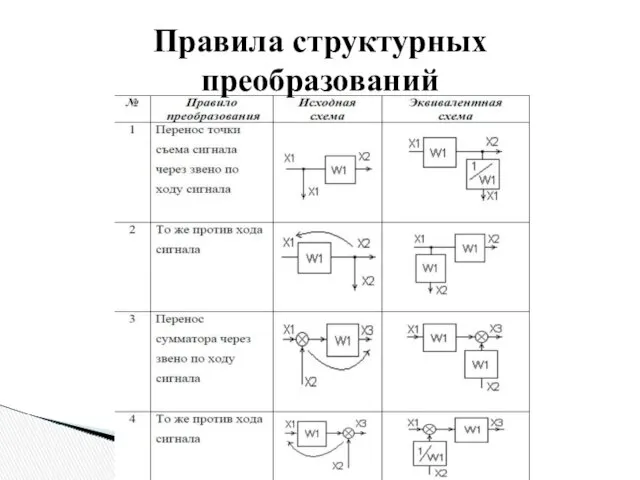
Правила структурных преобразований
Правила структурных преобразований

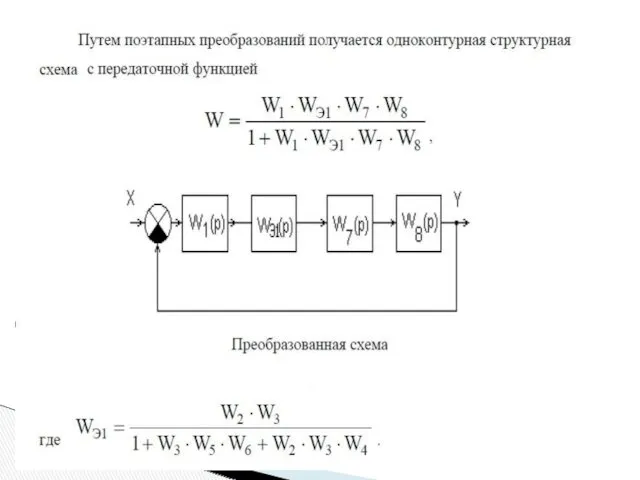
Пример преобразования
Пример преобразования

Переходная функция системы
Переходная функция системы
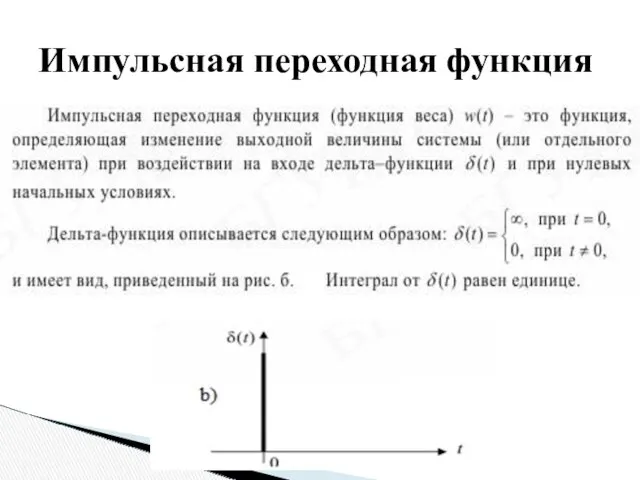
Импульсная переходная функция
Импульсная переходная функция
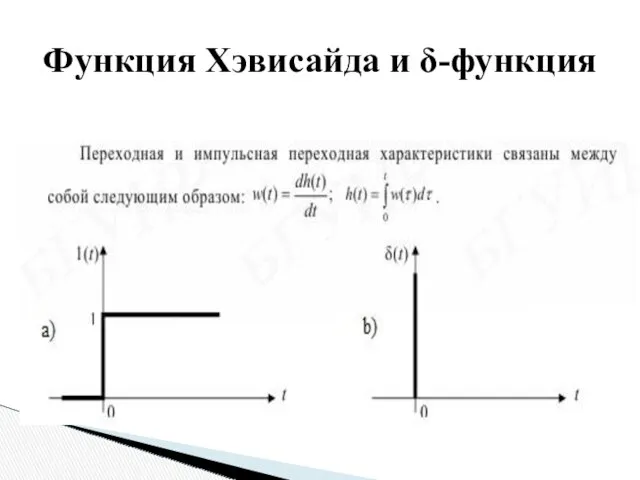
Функция Хэвисайда и δ-функция
Функция Хэвисайда и δ-функция
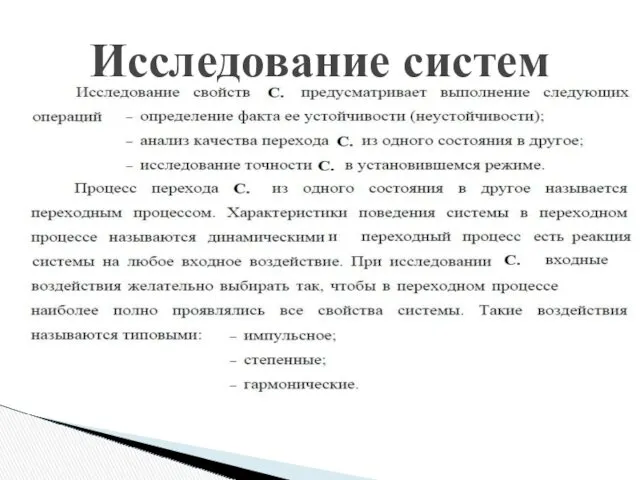
Исследование систем
Исследование систем
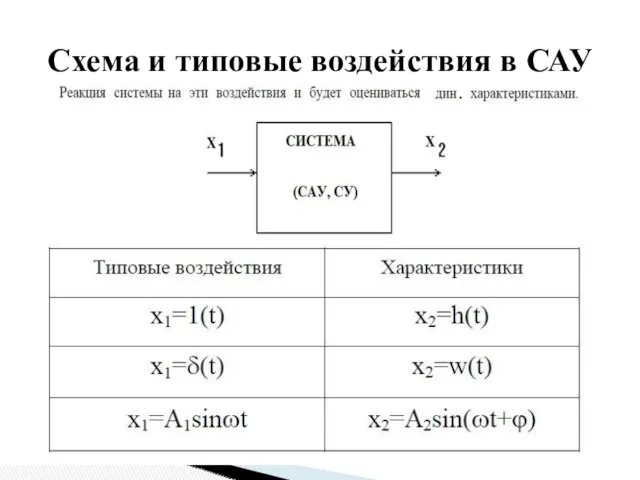
Схема и типовые воздействия в САУ
Схема и типовые воздействия в САУ

Алгоритм исследование систем (САУ)
Алгоритм исследование систем (САУ)
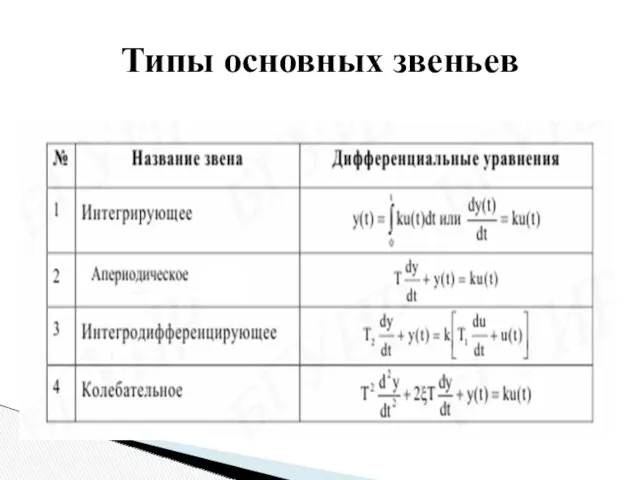
Типы основных звеньев
Типы основных звеньев
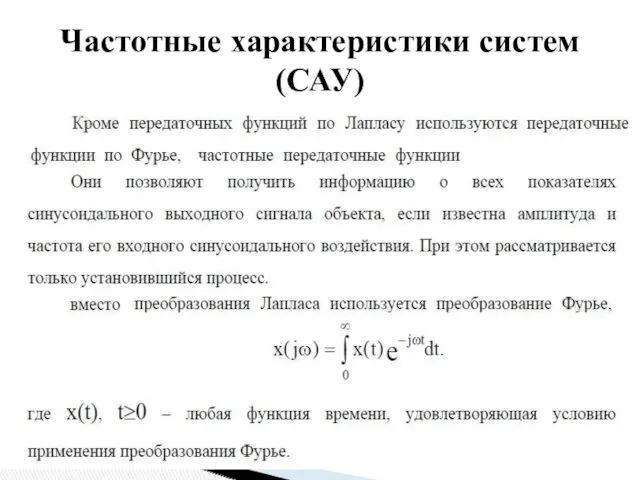
Частотные характеристики систем (САУ)
Частотные характеристики систем (САУ)
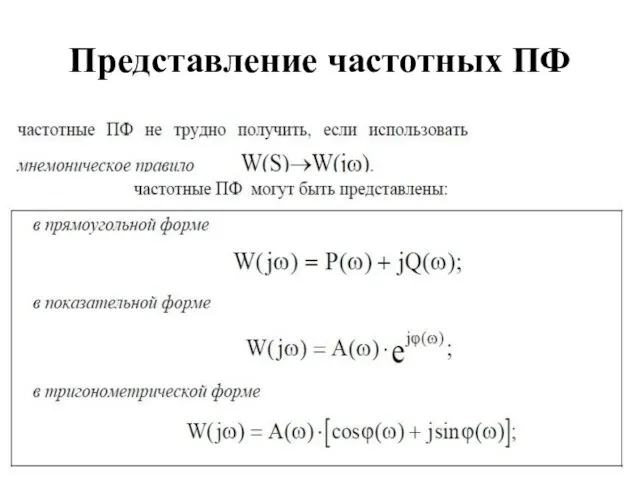
Представление частотных ПФ
Представление частотных ПФ
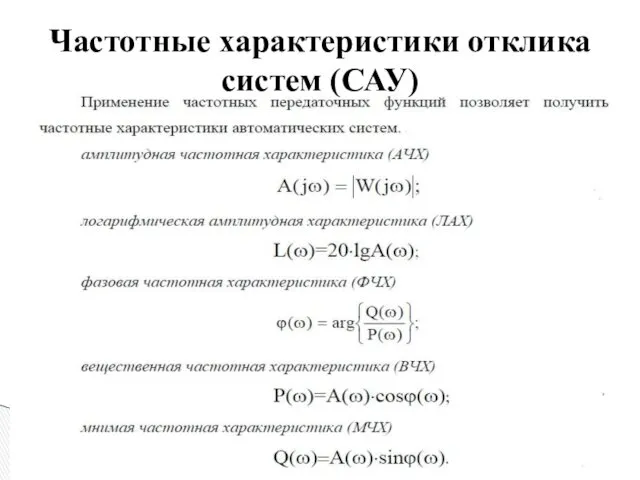
Частотные характеристики отклика систем (САУ)
Частотные характеристики отклика систем (САУ)
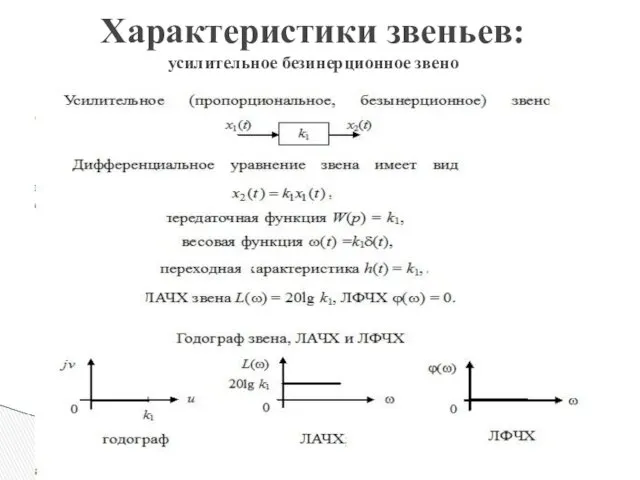
Характеристики звеньев:
усилительное безинерционное звено
Характеристики звеньев:
усилительное безинерционное звено
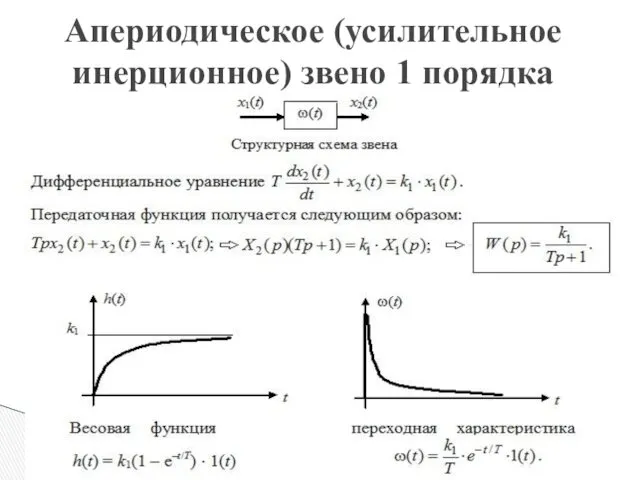
Апериодическое (усилительное инерционное) звено 1 порядка
Апериодическое (усилительное инерционное) звено 1 порядка
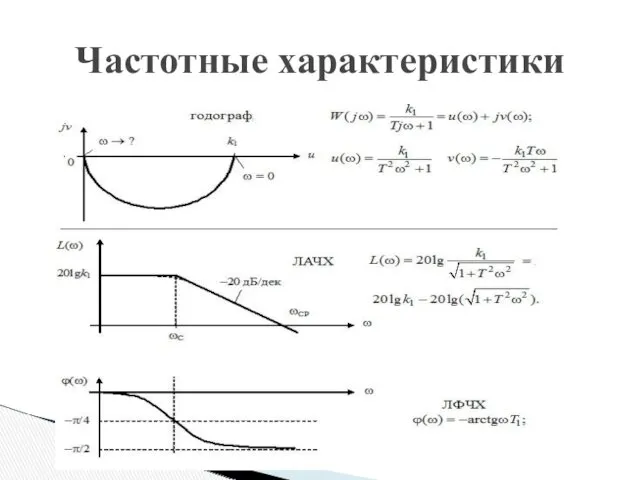
Частотные характеристики
Частотные характеристики
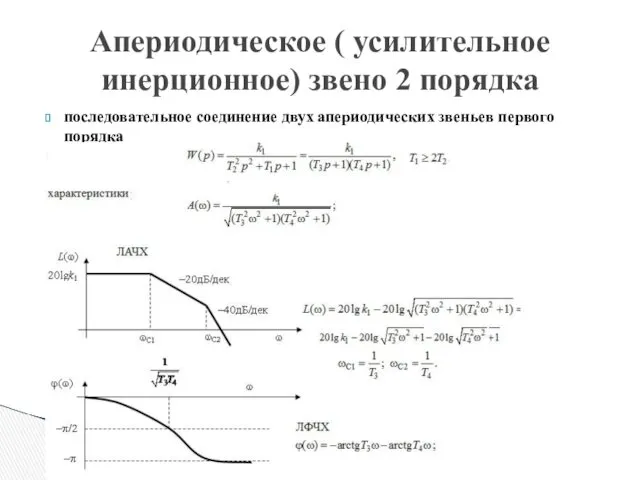
последовательное соединение двух апериодических звеньев первого порядка
Апериодическое ( усилительное инерционное) звено
последовательное соединение двух апериодических звеньев первого порядка
Апериодическое ( усилительное инерционное) звено
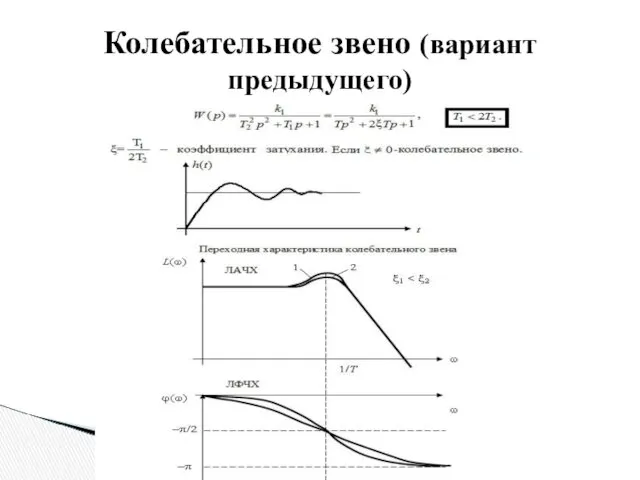
Колебательное звено (вариант предыдущего)
Колебательное звено (вариант предыдущего)
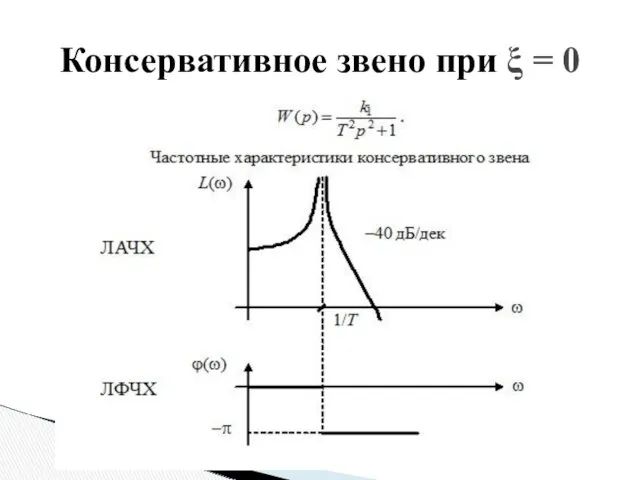
Консервативное звено при ξ = 0
Консервативное звено при ξ = 0

Интегрирующее звено
∞
Интегрирующее звено
∞
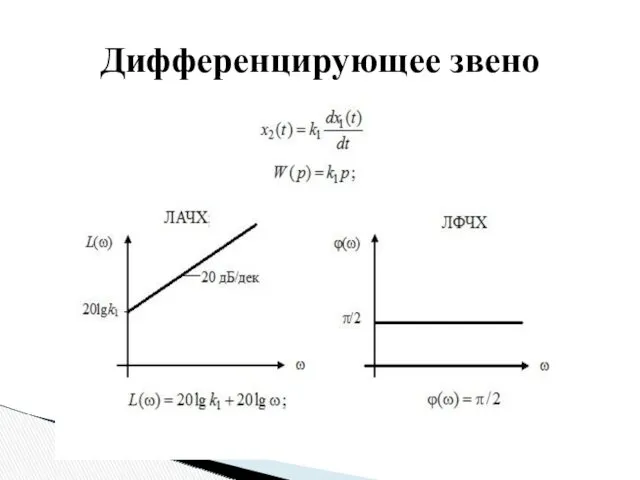
Дифференцирующее звено
Дифференцирующее звено
Примеры использования звеньев на практике
Примеры использования звеньев на практике
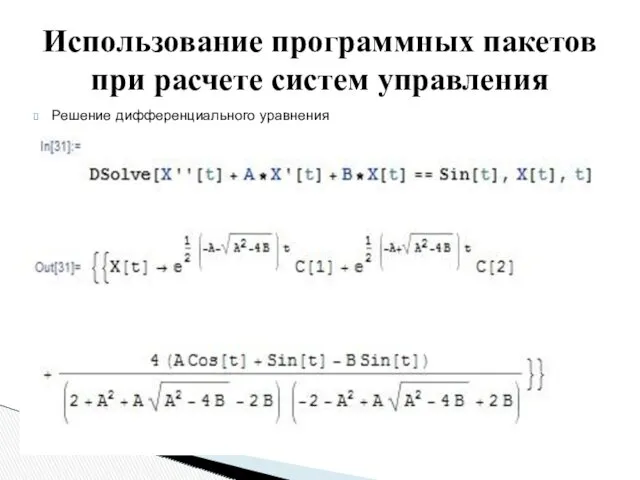
Решение дифференциального уравнения
Использование программных пакетов при расчете систем управления
Решение дифференциального уравнения
Использование программных пакетов при расчете систем управления
![LaplaceTransform[t*Sin[t],t,s] Ответ: (2 s)/(1+s^2)2 LaplaceTransform[DiracDelta[t],t,s] Ответ : 1/s LaplaceTransform[X''[t]-4*X'[t]+3*X[t],t,s]//TraditionalForm Ответ](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/108249/slide-49.jpg)
LaplaceTransform[t*Sin[t],t,s]
Ответ: (2 s)/(1+s^2)2
LaplaceTransform[DiracDelta[t],t,s]
Ответ : 1/s
LaplaceTransform[X''[t]-4*X'[t]+3*X[t],t,s]//TraditionalForm
Ответ : s2 (Lt[X(t)](s))+3
LaplaceTransform[t*Sin[t],t,s]
Ответ: (2 s)/(1+s^2)2
LaplaceTransform[DiracDelta[t],t,s]
Ответ : 1/s
LaplaceTransform[X''[t]-4*X'[t]+3*X[t],t,s]//TraditionalForm
Ответ : s2 (Lt[X(t)](s))+3
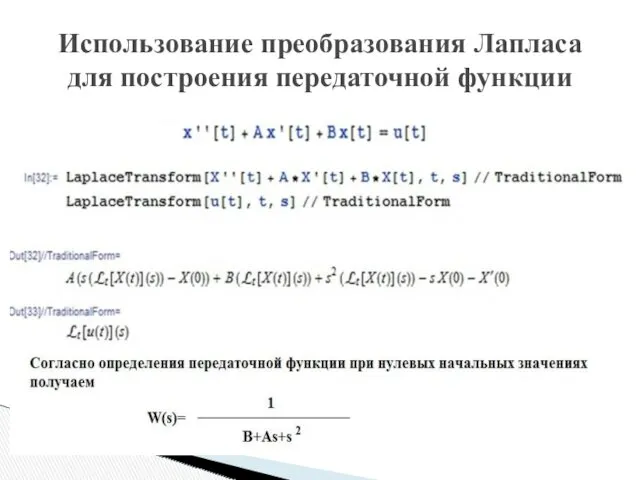
Использование преобразования Лапласа для построения передаточной функции
Использование преобразования Лапласа для построения передаточной функции
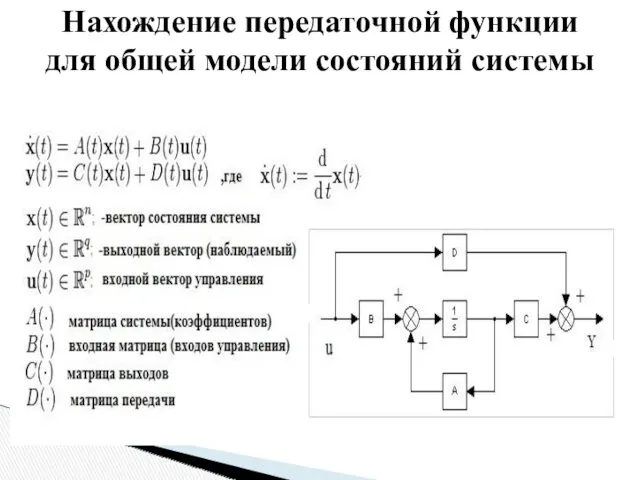
Нахождение передаточной функции для общей модели состояний системы
Нахождение передаточной функции для общей модели состояний системы
![Одно уравнение x''[t]+A x'[t]+B x[t]=u[t] второго порядка эквивалентно системе из](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/108249/slide-52.jpg)
Одно уравнение x''[t]+A x'[t]+B x[t]=u[t] второго порядка эквивалентно системе из 2
Одно уравнение x''[t]+A x'[t]+B x[t]=u[t] второго порядка эквивалентно системе из 2
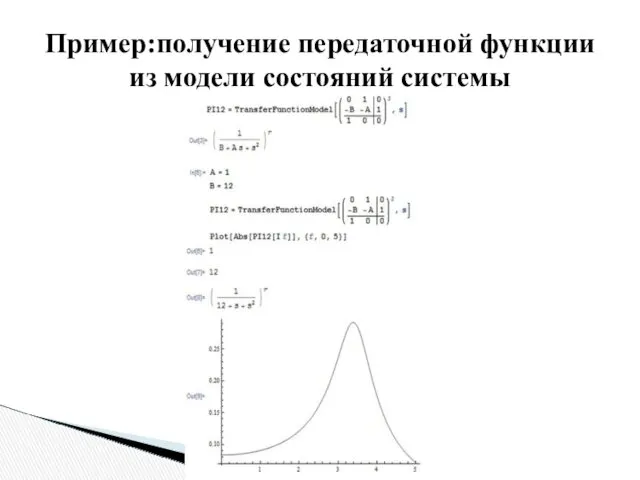
Пример:получение передаточной функции из модели состояний системы
Пример:получение передаточной функции из модели состояний системы
![Входное воздействие l(t)-UnitStep[t] Выходная реакция- (функция Хэвисайда) переходная функция Нахождение переходной функции](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/108249/slide-54.jpg)
Входное воздействие l(t)-UnitStep[t] Выходная реакция-
(функция Хэвисайда) переходная функция
Нахождение переходной функции
Входное воздействие l(t)-UnitStep[t] Выходная реакция-
(функция Хэвисайда) переходная функция
Нахождение переходной функции
![Входное воздействие δ(t)-DiracDelta[t] Выходная реакция- импульсная функция Нахождение импульсной переходной функции](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/108249/slide-55.jpg)
Входное воздействие δ(t)-DiracDelta[t] Выходная реакция-
импульсная функция
Нахождение импульсной переходной функции
Входное воздействие δ(t)-DiracDelta[t] Выходная реакция-
импульсная функция
Нахождение импульсной переходной функции
![Входное воздействие Sin[4 t] Выходная реакция- гармонический отклик Нахождение отклика системы на гармоническое воздействие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/108249/slide-56.jpg)
Входное воздействие Sin[4 t] Выходная реакция-
гармонический отклик
Нахождение отклика системы
Входное воздействие Sin[4 t] Выходная реакция-
гармонический отклик
Нахождение отклика системы
один из способов судить об устойчивости замкнутой системы управления по АФЧХ её разомкнутого состояния.
Если разомкнутая
один из способов судить об устойчивости замкнутой системы управления по АФЧХ её разомкнутого состояния.
Если разомкнутая
 Решение тригонометрических уравнений и неравенств
Решение тригонометрических уравнений и неравенств Задачи-шутки
Задачи-шутки Математика 4 класс СКОРОСТЬ
Математика 4 класс СКОРОСТЬ конспект и презентация урока по математике 3 класс Квадратный метр
конспект и презентация урока по математике 3 класс Квадратный метр Теорема о соотношениях между сторонами и углами треугольника
Теорема о соотношениях между сторонами и углами треугольника Методы представления статистических данных
Методы представления статистических данных Решение задач с величинами цена, количество, стоимость
Решение задач с величинами цена, количество, стоимость Конус. Объемная фигура
Конус. Объемная фигура Основні співвідношення між тригонометричними функціями одного аргументу
Основні співвідношення між тригонометричними функціями одного аргументу Уравнения и неравенства. Область допустимых значений
Уравнения и неравенства. Область допустимых значений Изучаем геометрические фигуры
Изучаем геометрические фигуры Веселый счет. (1 класс)
Веселый счет. (1 класс) Параллельные прямые
Параллельные прямые Приём письменного деления многозначных чисел на однозначное число
Приём письменного деления многозначных чисел на однозначное число Методическая разработка урока математики во 2 классе на тему: Периметр. Программа Школа 2100.
Методическая разработка урока математики во 2 классе на тему: Периметр. Программа Школа 2100. Угол между векторами. Скалярное произведение векторов
Угол между векторами. Скалярное произведение векторов Алгебра логики. Основные операции алгебры логики
Алгебра логики. Основные операции алгебры логики Задачи на применение прогрессий из старых учебников по математике
Задачи на применение прогрессий из старых учебников по математике Осевая и центральная симметрия
Осевая и центральная симметрия Конспект урокаНумерация чисел от 1 до 20 1 класс Школа России
Конспект урокаНумерация чисел от 1 до 20 1 класс Школа России Измерение углов
Измерение углов Презентация младшая группа Дидиктическая игра Подбери форму Диск
Презентация младшая группа Дидиктическая игра Подбери форму Диск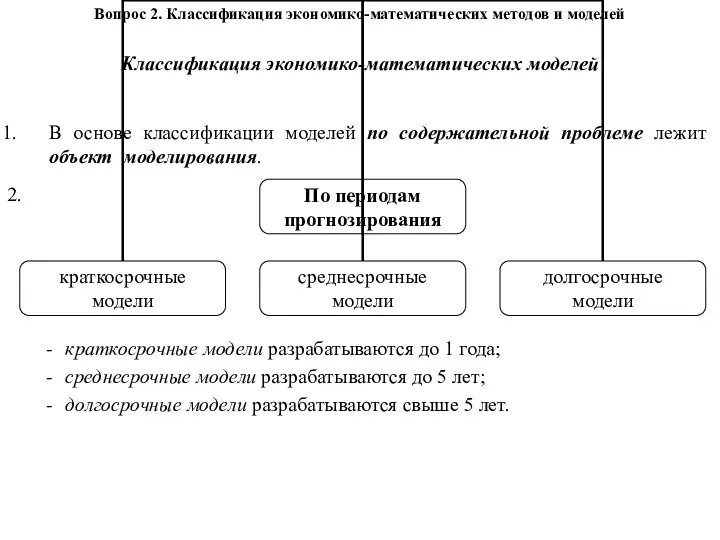 Классификация экономико-математических моделей
Классификация экономико-математических моделей Ремонт моей комнаты
Ремонт моей комнаты Магический квадрат. Соревнование среди учащихся 7a классa
Магический квадрат. Соревнование среди учащихся 7a классa Задания для повторения курса алгебры 7 класса
Задания для повторения курса алгебры 7 класса Арифметический корень n-ой степени
Арифметический корень n-ой степени Викторина Старинные русские меры - изучаем историю
Викторина Старинные русские меры - изучаем историю