- Область применения кулачковых механизмов

Содержание
- 2. Кулачковые механизмы применяются во многих приборах (программных, счетно-решающих, самопищущих автоматах) и машинах (станки, двигатели). В большинстве
- 3. К конструкции кулачкового механизма предъявляют ряд требований: механизм должен иметь габариты; ограниченные динамические нагрузки; максимальный коэффициент
- 4. Постоянный контакт толкателя с кулачком обеспечивается с помощью кинематического (а) или силового замыкания (б). В зависимости
- 5. Кулачковые механизмы по характеру движения могут быть плоскими (а, б) и пространственными (в), по взаимному расположению
- 6. а – толкатель с роликом; б – толкатель грибообразный; в – толкатель с острием; г, д
- 7. Законы движения ведомых звеньев Теоретически в кулачковом механизме можно осуществить самые различные законы движения ведомых звеньев,
- 8. Динамическое условие Пусть кулачок действует на толкатель с некоторой силой Fд (сила давления). Вектор силы Fд
- 9. Для уменьшения силы H необходимо уменьшать угол давления δ. Однако, с другой стороны, с уменьшением угла
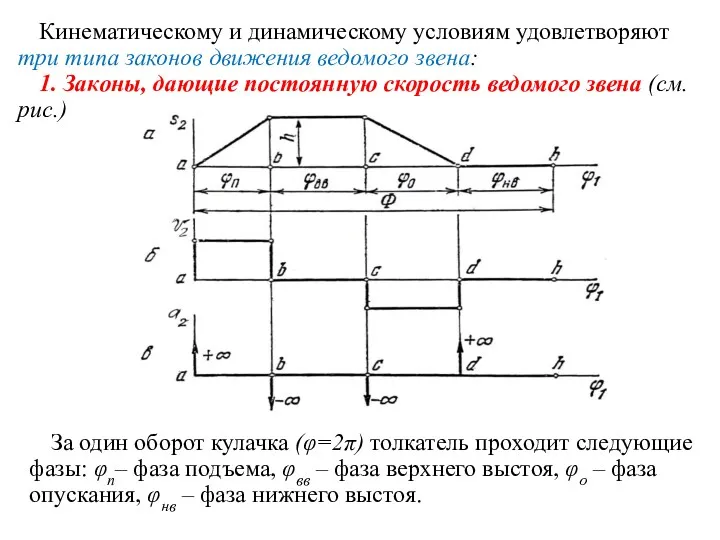
- 10. Кинематическому и динамическому условиям удовлетворяют три типа законов движения ведомого звена: 1. Законы, дающие постоянную скорость
- 11. Скорость движения толкателя на фазах подъема и опускания постоянна. Ускорения на обеих фазах равны нулю, кроме
- 12. 2. Законы, дающие постоянное ускорение ведомого звена (см.рис.) В этих законах ускорение в некоторых точках мгновенно
- 13. 3. Безударные законы В этом случае кривая ускорений не имеет точек разрыва ни первого, ни второго
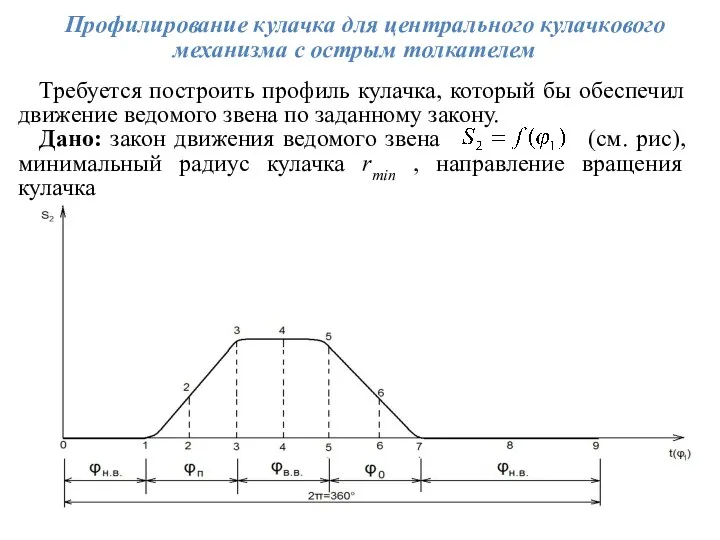
- 14. Профилирование кулачка для центрального кулачкового механизма с острым толкателем Требуется построить профиль кулачка, который бы обеспечил
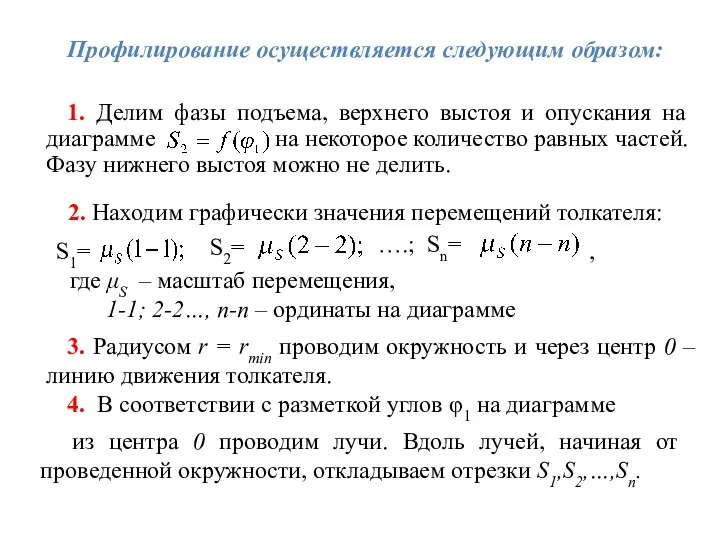
- 15. Профилирование осуществляется следующим образом: 1. Делим фазы подъема, верхнего выстоя и опускания на диаграмме на некоторое
- 16. 5. Соединяя полученные точки 1′,2′,…,n′ плавной кривой получим профиль кулачка.
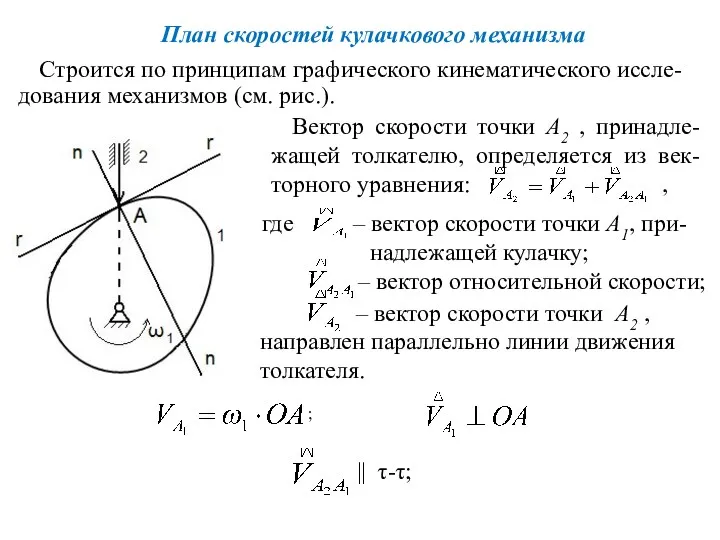
- 17. План скоростей кулачкового механизма Строится по принципам графического кинематического иссле-дования механизмов (см. рис.). где – вектор
- 18. Из полюса pV в масштабе μυ проводим вектор . Из конца этого вектора проводим направление вектора
- 19. Полученный треугольник АОВ и план скоростей pυab подобны. Следовательно: Поскольку , где Из точки А отложим
- 21. Скачать презентацию
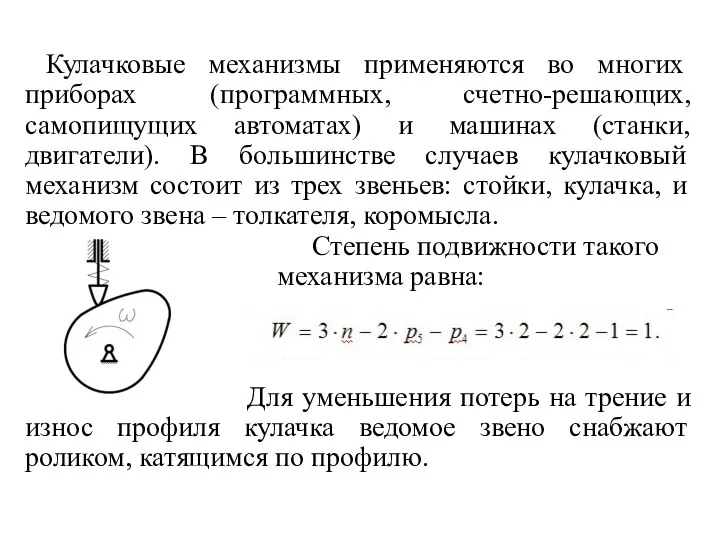
Кулачковые механизмы применяются во многих приборах (программных, счетно-решающих, самопищущих автоматах) и
Кулачковые механизмы применяются во многих приборах (программных, счетно-решающих, самопищущих автоматах) и
К конструкции кулачкового механизма предъявляют ряд требований: механизм должен иметь габариты;
К конструкции кулачкового механизма предъявляют ряд требований: механизм должен иметь габариты;
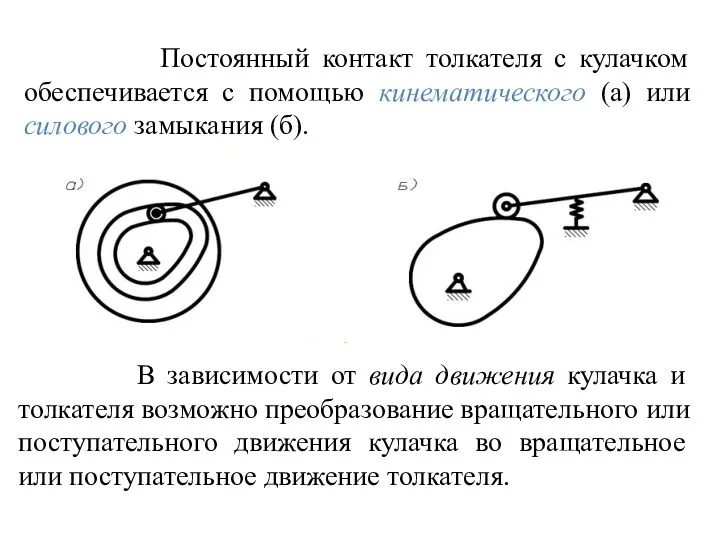
Постоянный контакт толкателя с кулачком обеспечивается с помощью кинематического (а)
Постоянный контакт толкателя с кулачком обеспечивается с помощью кинематического (а)
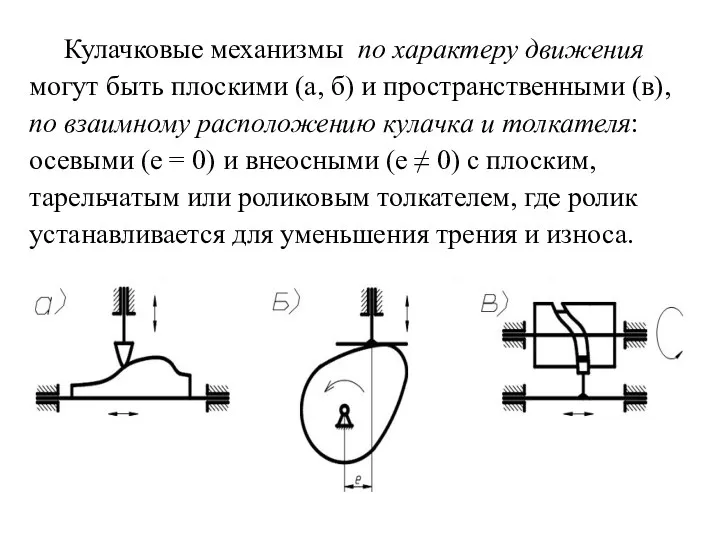
Кулачковые механизмы по характеру движения могут быть плоскими (а, б)
Кулачковые механизмы по характеру движения могут быть плоскими (а, б)
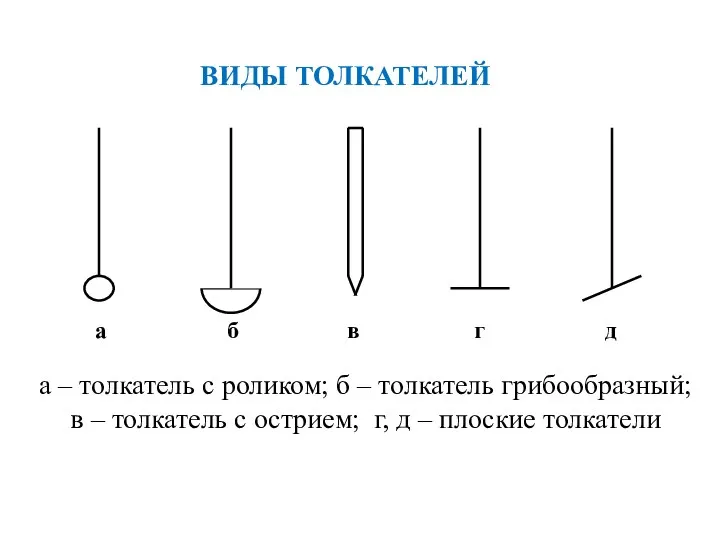
а – толкатель с роликом; б – толкатель грибообразный;
в –
а – толкатель с роликом; б – толкатель грибообразный;
в –
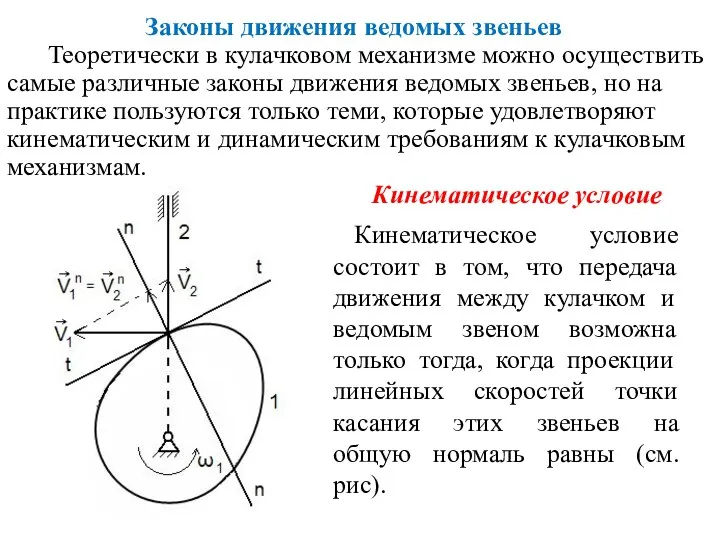
Законы движения ведомых звеньев
Теоретически в кулачковом механизме можно осуществить
Законы движения ведомых звеньев
Теоретически в кулачковом механизме можно осуществить
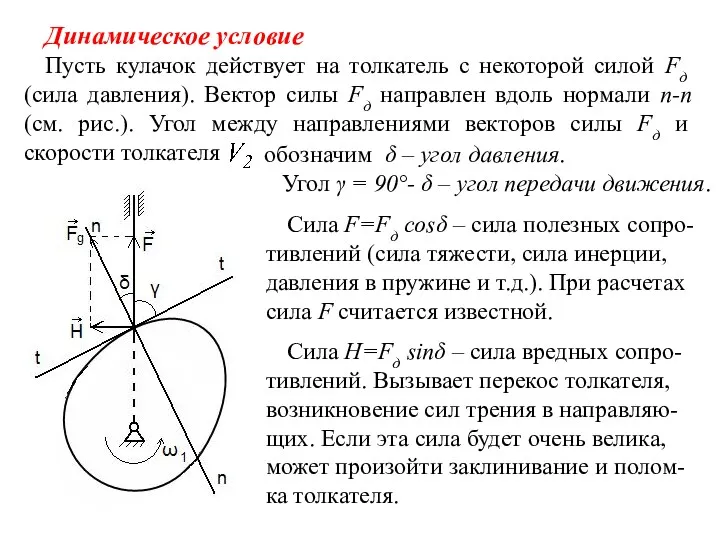
Динамическое условие
Пусть кулачок действует на толкатель с некоторой силой Fд (сила
Динамическое условие
Пусть кулачок действует на толкатель с некоторой силой Fд (сила
Для уменьшения силы H необходимо уменьшать угол давления δ. Однако, с
Для уменьшения силы H необходимо уменьшать угол давления δ. Однако, с
Кинематическому и динамическому условиям удовлетворяют три типа законов движения ведомого звена:
1.
Кинематическому и динамическому условиям удовлетворяют три типа законов движения ведомого звена:
1.
Скорость движения толкателя на фазах подъема и опускания постоянна. Ускорения на
Скорость движения толкателя на фазах подъема и опускания постоянна. Ускорения на
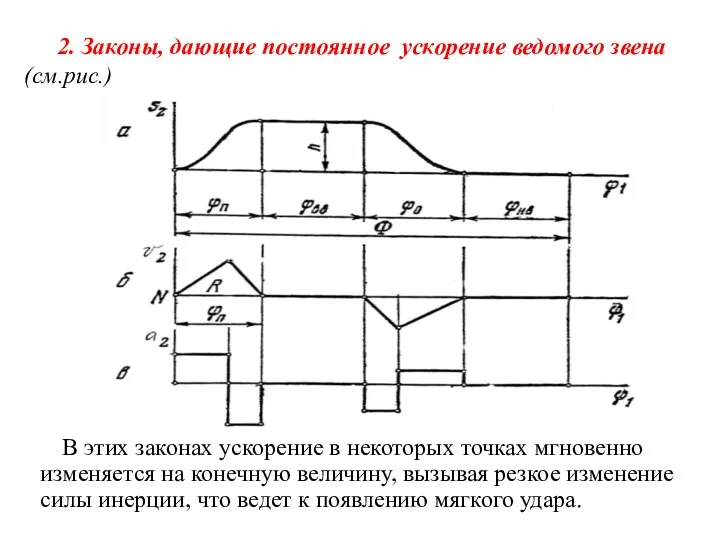
2. Законы, дающие постоянное ускорение ведомого звена (см.рис.)
В этих законах
2. Законы, дающие постоянное ускорение ведомого звена (см.рис.)
В этих законах
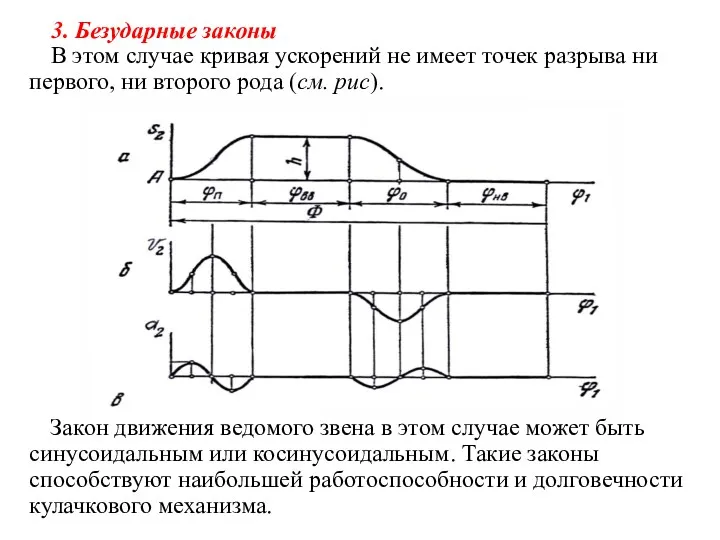
3. Безударные законы
В этом случае кривая ускорений не имеет точек разрыва
3. Безударные законы
В этом случае кривая ускорений не имеет точек разрыва
Профилирование кулачка для центрального кулачкового механизма с острым толкателем
Требуется построить профиль
Профилирование кулачка для центрального кулачкового механизма с острым толкателем
Требуется построить профиль
Профилирование осуществляется следующим образом:
1. Делим фазы подъема, верхнего выстоя и опускания
Профилирование осуществляется следующим образом:
1. Делим фазы подъема, верхнего выстоя и опускания
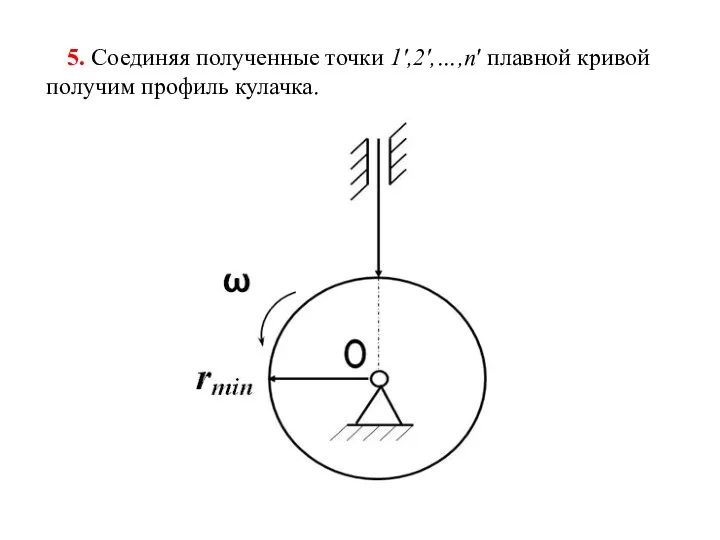
5. Соединяя полученные точки 1′,2′,…,n′ плавной кривой получим профиль кулачка.
5. Соединяя полученные точки 1′,2′,…,n′ плавной кривой получим профиль кулачка.
План скоростей кулачкового механизма
Строится по принципам графического кинематического иссле-дования механизмов (см.
План скоростей кулачкового механизма
Строится по принципам графического кинематического иссле-дования механизмов (см.
Из полюса pV в масштабе μυ проводим вектор . Из
Из полюса pV в масштабе μυ проводим вектор . Из
Полученный треугольник АОВ и план скоростей pυab подобны. Следовательно:
Поскольку
, где
Полученный треугольник АОВ и план скоростей pυab подобны. Следовательно:
Поскольку
, где
 Явление самоиндукции. Энергия магнитного поля
Явление самоиндукции. Энергия магнитного поля Бета-лучи. Измерение удельного заряда методом парабол. Зависимость массы от скорости. АФ1.3
Бета-лучи. Измерение удельного заряда методом парабол. Зависимость массы от скорости. АФ1.3 Законы механики Ньютона
Законы механики Ньютона Презентация, урок изучения нового материала Закон Всемирного тяготения.
Презентация, урок изучения нового материала Закон Всемирного тяготения. Температура
Температура Работа и Мощность
Работа и Мощность Дефектация деталей и ремонт типовых сборочных единиц ДСМ
Дефектация деталей и ремонт типовых сборочных единиц ДСМ Ғажайып ұяшықтар
Ғажайып ұяшықтар В мире звуков
В мире звуков Физико-технические основы электроэнергетики
Физико-технические основы электроэнергетики Пространственная система сил. (Тема 1.5)
Пространственная система сил. (Тема 1.5) Тест для 7 класса Взаимодействие тел. Масса тел
Тест для 7 класса Взаимодействие тел. Масса тел Реактивное движение. Потенциальная и кинетическая энергия. Закон сохранения энергии
Реактивное движение. Потенциальная и кинетическая энергия. Закон сохранения энергии Измерение времени. (2 класс)
Измерение времени. (2 класс) Биологическое действие радиации. Закон радиоактивного распада
Биологическое действие радиации. Закон радиоактивного распада Теоретическое и прикладное материаловедение. (Лекция 7)
Теоретическое и прикладное материаловедение. (Лекция 7) Создание анимации Кипение
Создание анимации Кипение Урок-игра по физике Звёздный час
Урок-игра по физике Звёздный час Микроскопия одиночных молекул
Микроскопия одиночных молекул Магнитное поле. Магнитная индукция
Магнитное поле. Магнитная индукция Взаимодействие токов. Магнитное поле
Взаимодействие токов. Магнитное поле Влияние радиоактивных излучений на живые организмы
Влияние радиоактивных излучений на живые организмы Изготовление дисков
Изготовление дисков Вечный двигатель
Вечный двигатель Водяной пар
Водяной пар Из истории радиоэлектроники
Из истории радиоэлектроники Магнітне поле
Магнітне поле Зануление
Зануление