- Описание линейных непрерывных САР. (Тема 1)

Содержание
- 2. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Понятие оператора Оператор дифференцирования Выходная функция Результатом использования оператора Tp есть то,
- 3. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Понятие оператора Оператор интегрирования Выходная функция – символ (оператор) интегрирования T –
- 4. Для того чтобы изучить свойства сложной физической системы и научиться управлять ей, необходимо получить ее математическую
- 5. Дифференциальные уравнения, описывающие динамику физической системы, получаются на основании фундаментальных физических законов. Этот метод в равной
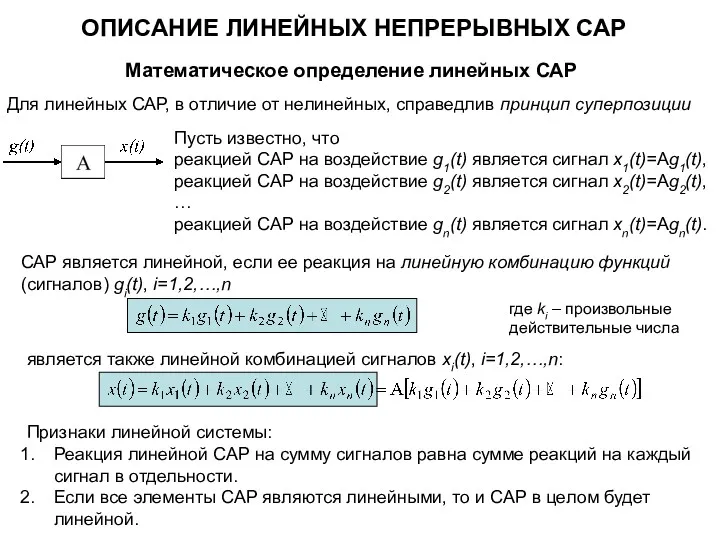
- 6. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Математическое определение линейных САР Для линейных САР, в отличие от нелинейных, справедлив
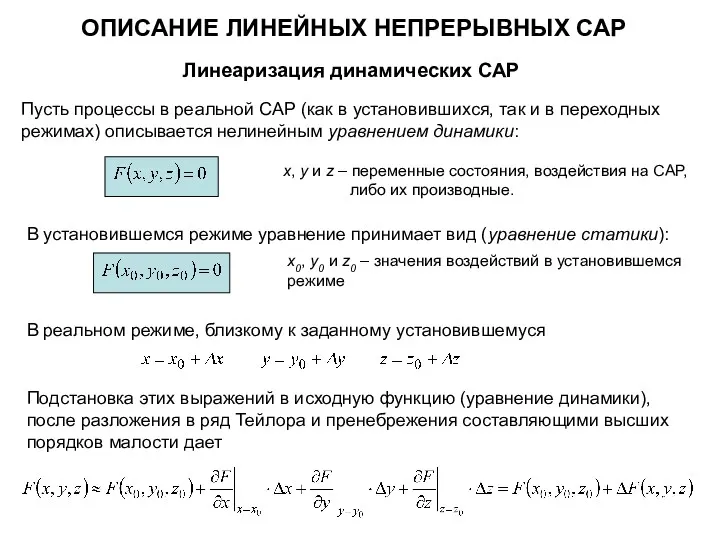
- 7. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Линеаризация динамических САР Пусть процессы в реальной САР (как в установившихся, так
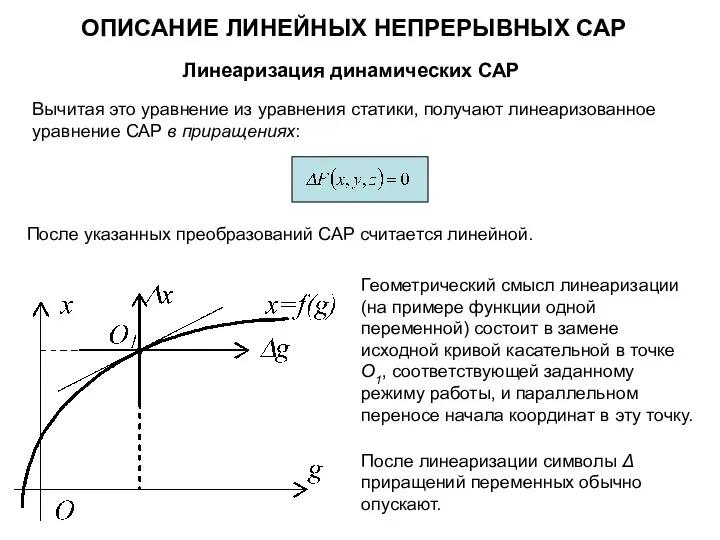
- 8. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Линеаризация динамических САР Геометрический смысл линеаризации (на примере функции одной переменной) состоит
- 10. Преобразование Лапласа Дифф. ур-ние Алгебр. ур-ние решение во временной области решение в s-области X(s) x(t) L
- 11. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Преобразование Лапласа Преобразованием Лапласа называют соотношение: которое ставит функции f(t) действительного переменного
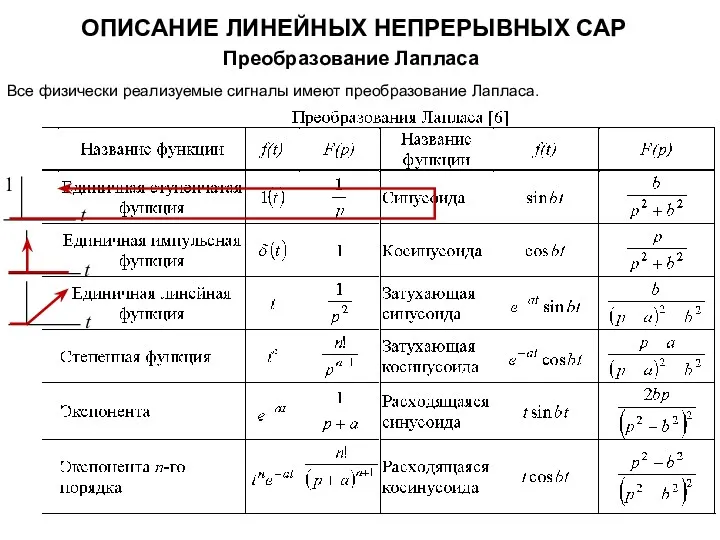
- 12. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Преобразование Лапласа Все физически реализуемые сигналы имеют преобразование Лапласа.
- 13. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Преобразование Лапласа
- 14. Механический амортизатор Динамика массы m описывается дифф. уравнением: Преобразование Лапласа Необходимо получить решение этого уравнения, т.е.
- 15. Преобразование Лапласа Механический амортизатор Рассмотрим систему масса-пружина для случая недодемпфированного движения. Выражение для Y(p) можно записать
- 16. Преобразование Лапласа Механический амортизатор Решение можно получить с помощью таблицы обратного преобразования Лапласа Введя обозначение ,
- 17. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Передаточная функция Передаточной функцией САР называется отношение изображения выходной переменной к изображению
- 18. Характеристический полином п.ф. – полином знаменателя Q(p); Порядок п.ф. – степень полинома знаменателя n; Относительный порядок
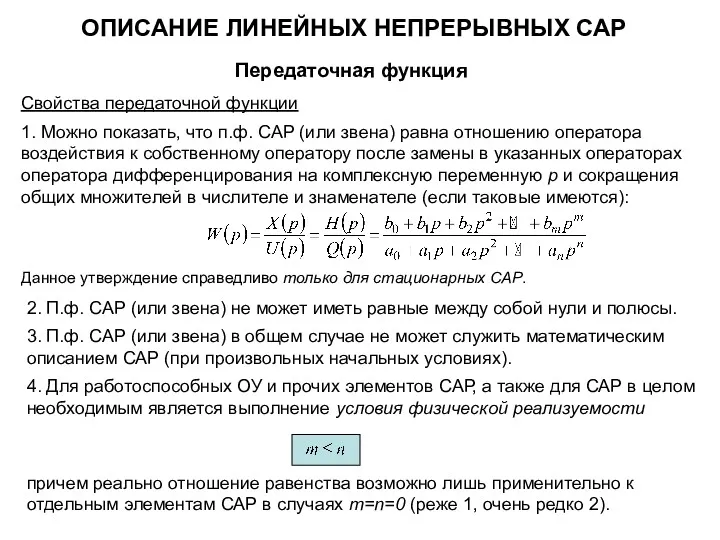
- 19. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Передаточная функция Свойства передаточной функции 1. Можно показать, что п.ф. САР (или
- 20. Передаточная функция системы масса-пружина получается, если в исходном уравнении все начальные условия положить равными нулю: Передаточная
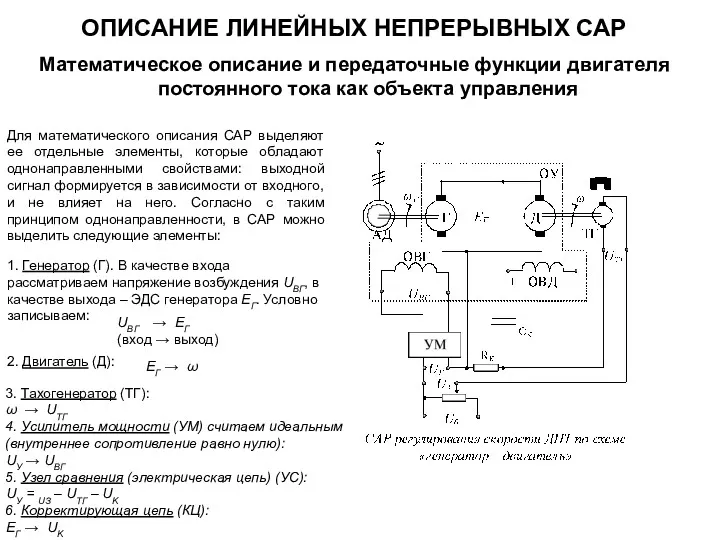
- 21. ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР Математическое описание и передаточные функции двигателя постоянного тока как объекта управления Для
- 22. Генератор Двигатель Тахогенератор Усилитель мощности Узел сравнения Цепь корректирования
- 24. Скачать презентацию
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
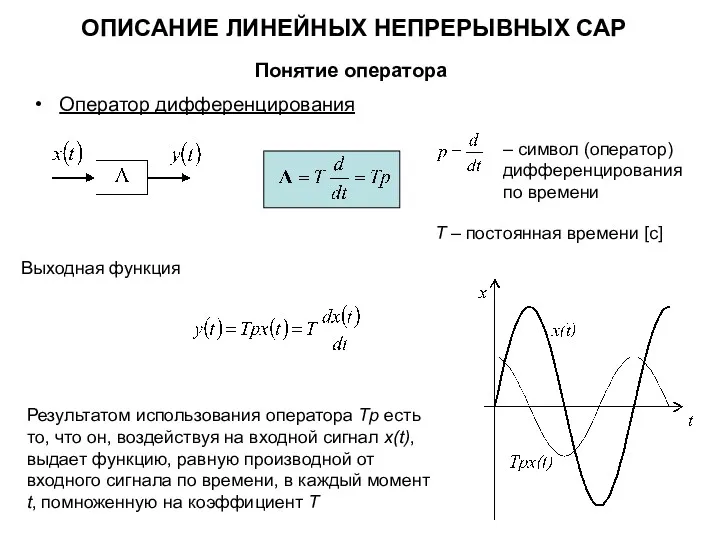
Понятие оператора
Оператор дифференцирования
Выходная функция
Результатом использования оператора
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Понятие оператора
Оператор дифференцирования
Выходная функция
Результатом использования оператора
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Понятие оператора
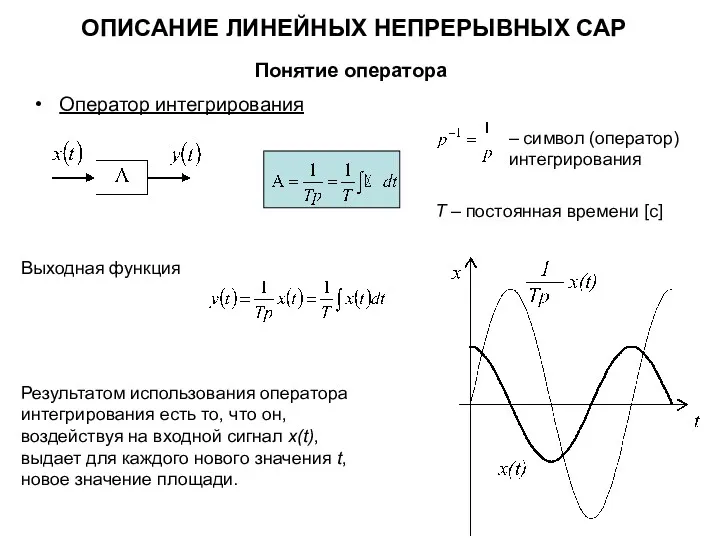
Оператор интегрирования
Выходная функция
– символ (оператор)
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Понятие оператора
Оператор интегрирования
Выходная функция
– символ (оператор)
Для того чтобы изучить свойства сложной физической системы и научиться управлять
Для того чтобы изучить свойства сложной физической системы и научиться управлять
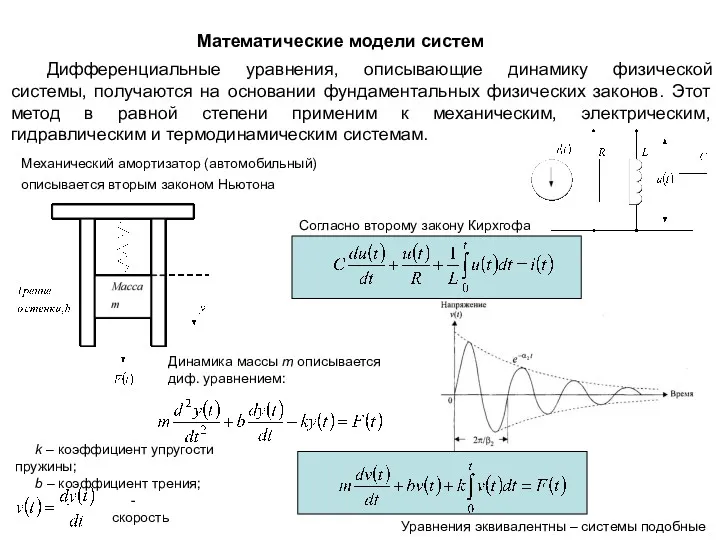
Дифференциальные уравнения, описывающие динамику физической системы, получаются на основании фундаментальных физических
Дифференциальные уравнения, описывающие динамику физической системы, получаются на основании фундаментальных физических
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Математическое определение линейных САР
Для линейных САР, в
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Математическое определение линейных САР
Для линейных САР, в
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Линеаризация динамических САР
Пусть процессы в реальной САР
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Линеаризация динамических САР
Пусть процессы в реальной САР
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Линеаризация динамических САР
Геометрический смысл линеаризации (на примере
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Линеаризация динамических САР
Геометрический смысл линеаризации (на примере
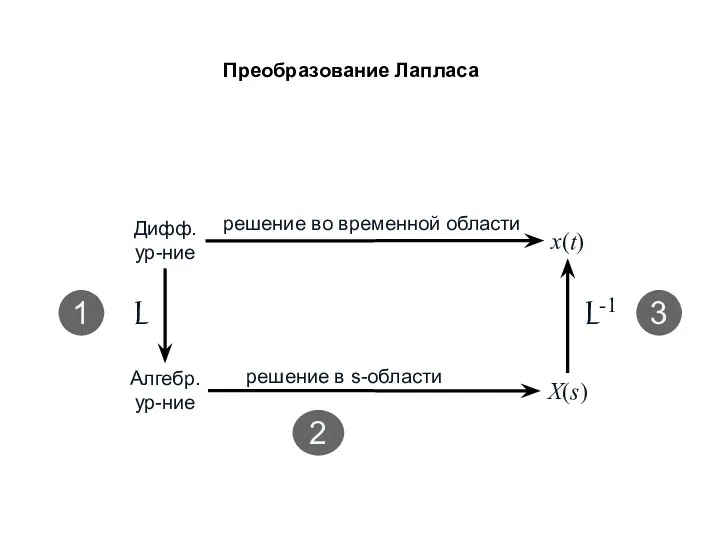
Преобразование Лапласа
Дифф.
ур-ние
Алгебр.
ур-ние
решение во временной области
решение в s-области
X(s)
x(t)
L
L-1
1
2
3
Преобразование Лапласа
Дифф.
ур-ние
Алгебр.
ур-ние
решение во временной области
решение в s-области
X(s)
x(t)
L
L-1
1
2
3
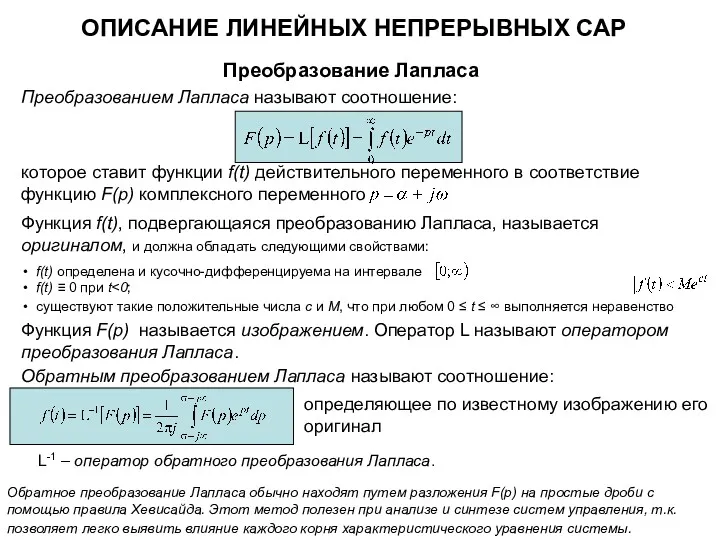
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
Преобразованием Лапласа называют соотношение:
которое ставит
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
Преобразованием Лапласа называют соотношение:
которое ставит
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
Все физически реализуемые сигналы имеют преобразование
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
Все физически реализуемые сигналы имеют преобразование
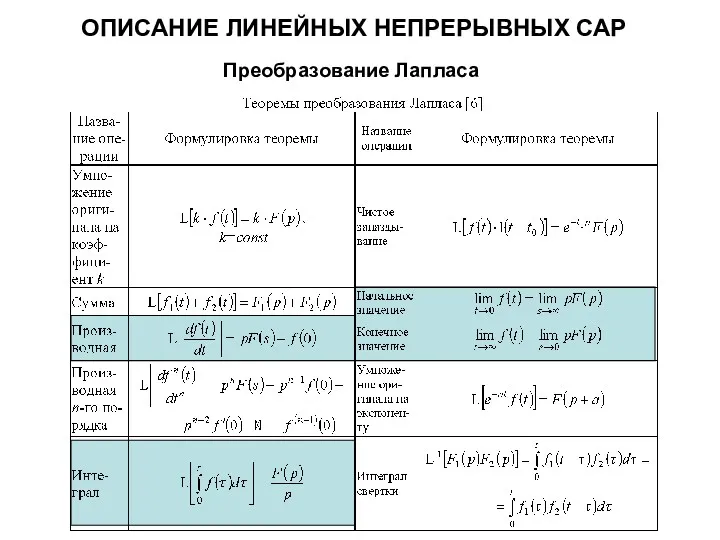
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Преобразование Лапласа
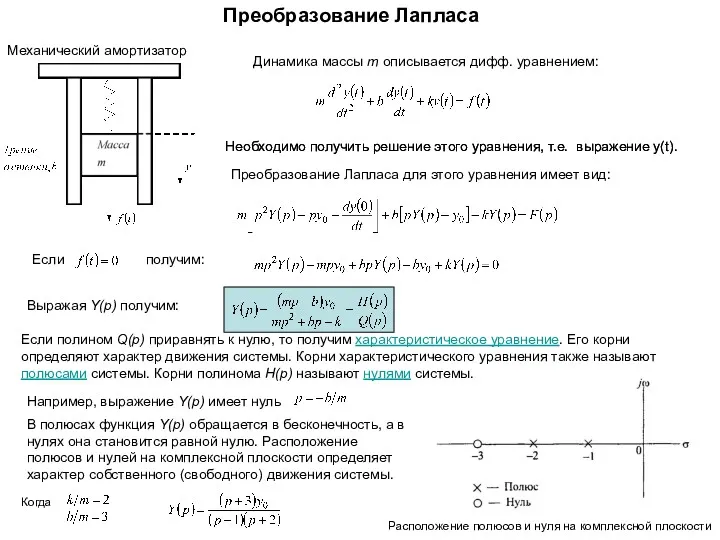
Механический амортизатор
Динамика массы m описывается дифф. уравнением:
Преобразование Лапласа
Необходимо получить решение
Механический амортизатор
Динамика массы m описывается дифф. уравнением:
Преобразование Лапласа
Необходимо получить решение
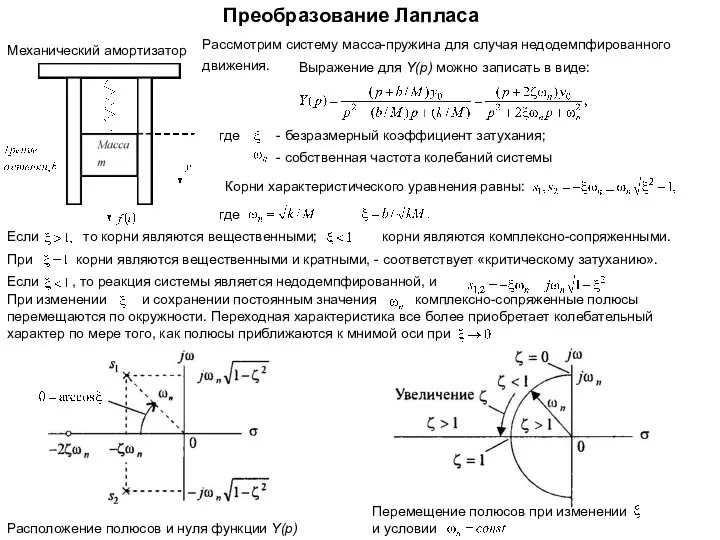
Преобразование Лапласа
Механический амортизатор
Рассмотрим систему масса-пружина для случая недодемпфированного движения.
Выражение для
Преобразование Лапласа
Механический амортизатор
Рассмотрим систему масса-пружина для случая недодемпфированного движения.
Выражение для
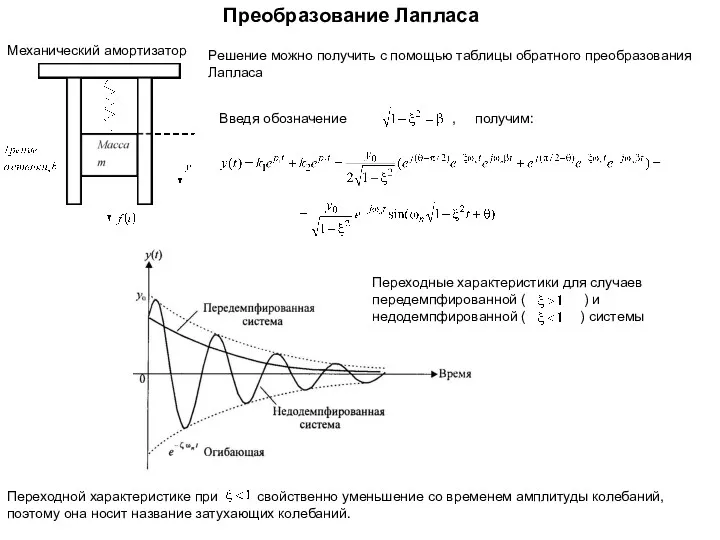
Преобразование Лапласа
Механический амортизатор
Решение можно получить с помощью таблицы обратного преобразования Лапласа
Введя
Преобразование Лапласа
Механический амортизатор
Решение можно получить с помощью таблицы обратного преобразования Лапласа
Введя
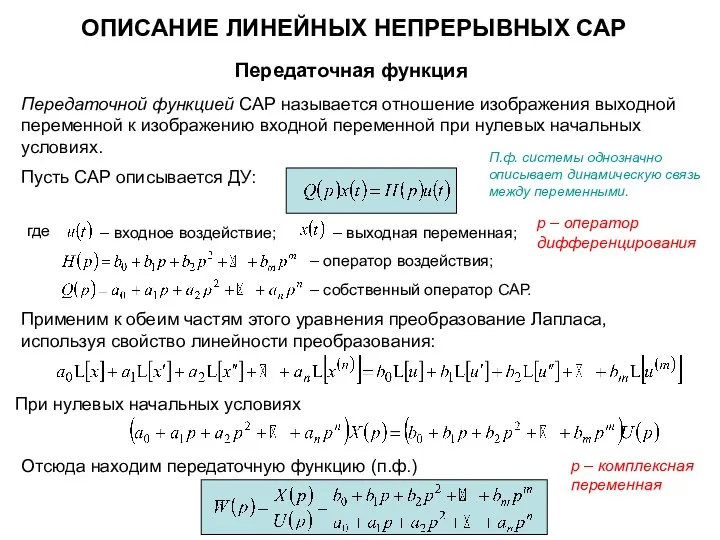
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Передаточная функция
Передаточной функцией САР называется отношение изображения
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Передаточная функция
Передаточной функцией САР называется отношение изображения
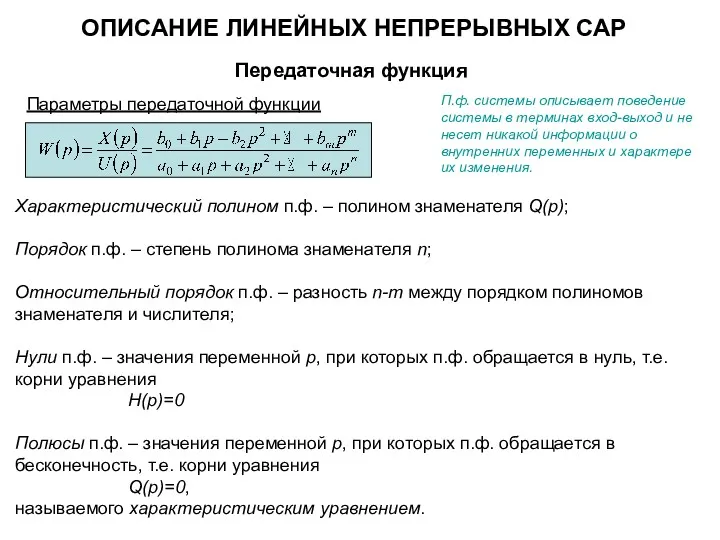
Характеристический полином п.ф. – полином знаменателя Q(p);
Порядок п.ф. – степень полинома
Характеристический полином п.ф. – полином знаменателя Q(p);
Порядок п.ф. – степень полинома
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Передаточная функция
Свойства передаточной функции
1. Можно показать, что
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Передаточная функция
Свойства передаточной функции
1. Можно показать, что
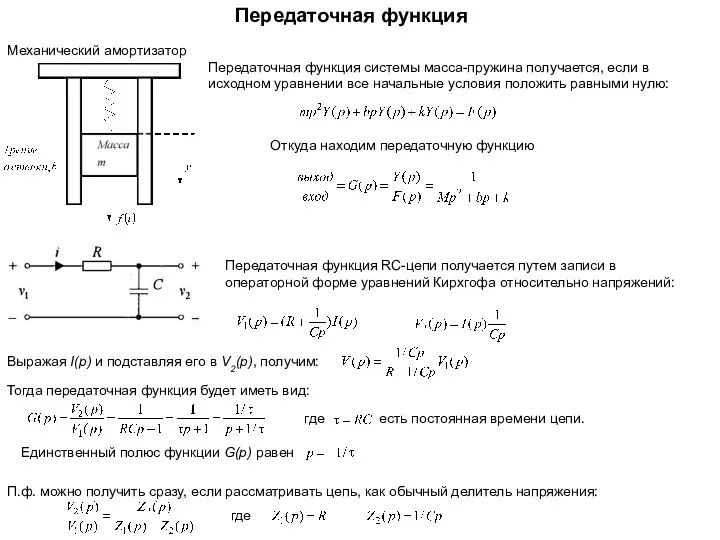
Передаточная функция системы масса-пружина получается, если в исходном уравнении все начальные
Передаточная функция системы масса-пружина получается, если в исходном уравнении все начальные
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Математическое описание и передаточные функции двигателя постоянного
ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР
Математическое описание и передаточные функции двигателя постоянного
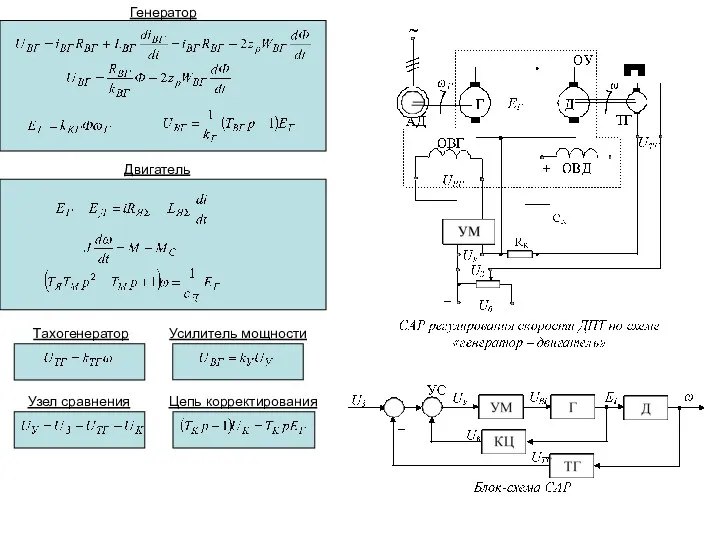
Генератор
Двигатель
Тахогенератор
Усилитель мощности
Узел сравнения
Цепь корректирования
Генератор
Двигатель
Тахогенератор
Усилитель мощности
Узел сравнения
Цепь корректирования
 Давление. Единицы давления
Давление. Единицы давления Использование системно-деятельностного подхода в преподавании физики
Использование системно-деятельностного подхода в преподавании физики Презентация Технологическая карта урока
Презентация Технологическая карта урока Механика жидкостей и газов. Биомеханика. Акустика. Лекция 4
Механика жидкостей и газов. Биомеханика. Акустика. Лекция 4 Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки
Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки Источники света. Распространение света
Источники света. Распространение света Игра В мире занимательной физики
Игра В мире занимательной физики Электромобиль. Возможности и перспективы использования (7 класс)
Электромобиль. Возможности и перспективы использования (7 класс) Гидравлический расчет трубопроводов
Гидравлический расчет трубопроводов Дисциплина Прикладная механика. Основные понятия и определения
Дисциплина Прикладная механика. Основные понятия и определения Плоская система сил. Центр параллельных сил (статика, лекция 6)
Плоская система сил. Центр параллельных сил (статика, лекция 6) Взаимодействие тел. Масса тела
Взаимодействие тел. Масса тела Инерция 7 класс Сила инерции
Инерция 7 класс Сила инерции Использование ИКТ на уроках физики. Основная роль ИКТ в работе учителя
Использование ИКТ на уроках физики. Основная роль ИКТ в работе учителя Первый закон Ньютона
Первый закон Ньютона Магнитное поле и его характеристики
Магнитное поле и его характеристики Квалификационная работа Анализ конструкционных особенностей входного устройства двигателя при дозвуковых скоростях
Квалификационная работа Анализ конструкционных особенностей входного устройства двигателя при дозвуковых скоростях Конструирование элементов ременных и цепных передач
Конструирование элементов ременных и цепных передач Упругие поля (поля напряжений) вокруг дислокаций. Энергия дислокаций. Термодинамика дислокаций
Упругие поля (поля напряжений) вокруг дислокаций. Энергия дислокаций. Термодинамика дислокаций Динамика. Законы Ньютона. 10 класс
Динамика. Законы Ньютона. 10 класс Лучшие физики. КВН
Лучшие физики. КВН Механические колебания
Механические колебания Искусственные алмазы
Искусственные алмазы Соединене проводников
Соединене проводников Электрический ток в полупроводниках
Электрический ток в полупроводниках Валы и подшипники. Подшипники качения (ПК)
Валы и подшипники. Подшипники качения (ПК) Механика. Подготовка к контрольной работе
Механика. Подготовка к контрольной работе Презентация Законы электрического тока.
Презентация Законы электрического тока.