Передаточна функція систем автоматики. Стуктурно-динамічні схеми систем автоматики та їх перетворення. (Лекція 2) презентация
- Передаточна функція систем автоматики. Стуктурно-динамічні схеми систем автоматики та їх перетворення. (Лекція 2)

Содержание
- 2. Питання 1. Статичні та динамічні характеристики лінійних систем автоматики Можна виділити три типових стани САУ: спокій
- 3. Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного в статичному режимі. Статичний режим
- 4. Статичні характеристики: Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу X до вхідної величини Z
- 5. Статичні характеристики: Похибка елементу: абсолютна; відносна; наведенна. Похибка, яка виникає при нормальних умовах експлуатації елементу (при
- 6. Динамічні характеристики: Передаточна функція. Часові характеристики: одинична перехідна функція; імпульсна перехідна функція. Частотні характеристики: амплітудно-фазова ЧХ;
- 7. Питання 2. Лінеаризація диференційних рівнянь.
- 8. Лінеаризація рівнянь елементів САУ Лінеаризацією називається заміна нелінійного диференційного рівняння (ДР) наближеним до нього лінійним ДР.
- 9. ЗАДАЧА Лінеаризувати нелінійне диференційне рівняння
- 10. Алгоритм приведення лінеаризованого диференційного рівняння до стандартної форми запису Позбавляємось знаку Δ перед змінними Δ x,
- 11. Питання 3. Передаточна функція
- 12. Пьер Симон Лаплас 23.03.1749 - 05.03.1827 «То, что мы знаем, так ничтожно по сравнению с тем,
- 13. Пряме перетворення Лапласа: Зворотне перетворення Лапласа: Основні властивості перетворення Лапласа: 1. адитивність: 2. однорідність: 3. Правило
- 14. Передаточна функція: У загальному вигляді лінеаризоване рівняння елемента має вигляд:
- 15. Передаточною функцією автоматичного пристрою називається відношення зображень по Лапласу вихідного сигналу до зображення по Лапласу вхідного
- 16. Питання 4. Стуктурно-динамічні схеми систем автоматики та їх перетворення.
- 17. В системах автоматичного управління застосовуються наступні з’єднання елементів: послідовне; узгоджено-паралельне; зустрічно-паралельне.
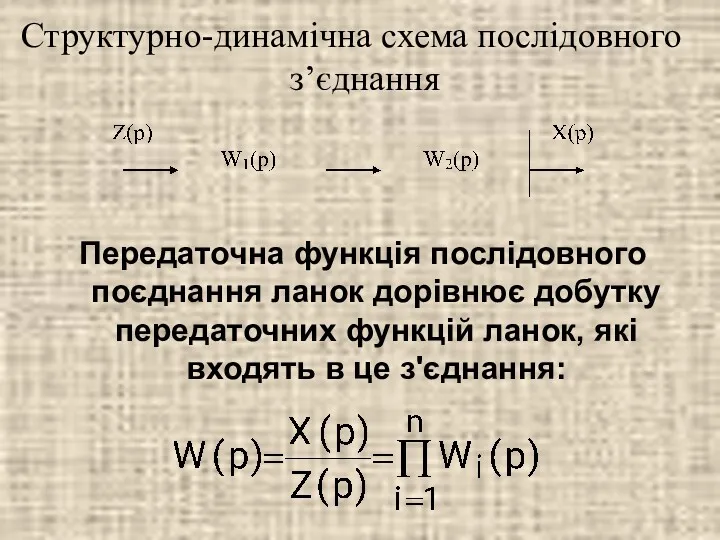
- 18. Структурно-динамічна схема послідовного з’єднання Передаточна функція послідовного поєднання ланок дорівнює добутку передаточних функцій ланок, які входять
- 19. Структурно-динамічна схема узгоджено-паралельного з’єднання
- 20. Передаточна функція узгоджено-паралельного з’єднання ланок дорівнює алгебраїчній сумі передаточних функцій ланок, які входять в це з'єднання:
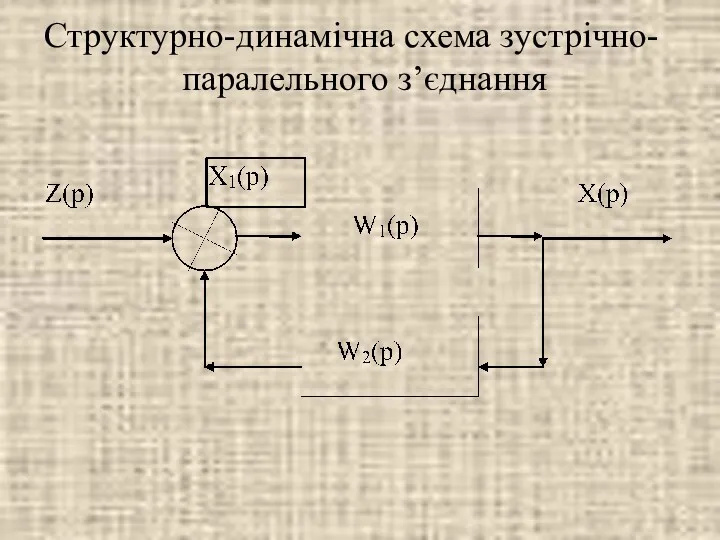
- 21. Структурно-динамічна схема зустрічно-паралельного з’єднання
- 22. Передаточна функція зустрічно-паралельного з’єднання ланок є дріб, в чисельнику якого записується вираз для передаточної функції прямого
- 24. Скачать презентацию
Питання 1. Статичні та динамічні характеристики лінійних систем автоматики
Можна виділити три
Питання 1. Статичні та динамічні характеристики лінійних систем автоматики
Можна виділити три
Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного
Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного
Статичні характеристики:
Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу X
Статичні характеристики:
Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу X
Статичні характеристики:
Похибка елементу:
абсолютна;
відносна;
наведенна.
Похибка, яка виникає при
Статичні характеристики:
Похибка елементу:
абсолютна;
відносна;
наведенна.
Похибка, яка виникає при
Динамічні характеристики:
Передаточна функція.
Часові характеристики:
одинична перехідна функція;
імпульсна перехідна функція.
Частотні характеристики:
Динамічні характеристики:
Передаточна функція.
Часові характеристики:
одинична перехідна функція;
імпульсна перехідна функція.
Частотні характеристики:
Питання 2.
Лінеаризація диференційних рівнянь.
Питання 2.
Лінеаризація диференційних рівнянь.
Лінеаризація рівнянь елементів САУ
Лінеаризацією називається заміна нелінійного диференційного рівняння (ДР) наближеним
Лінеаризація рівнянь елементів САУ
Лінеаризацією називається заміна нелінійного диференційного рівняння (ДР) наближеним
ЗАДАЧА
Лінеаризувати нелінійне диференційне рівняння
ЗАДАЧА
Лінеаризувати нелінійне диференційне рівняння
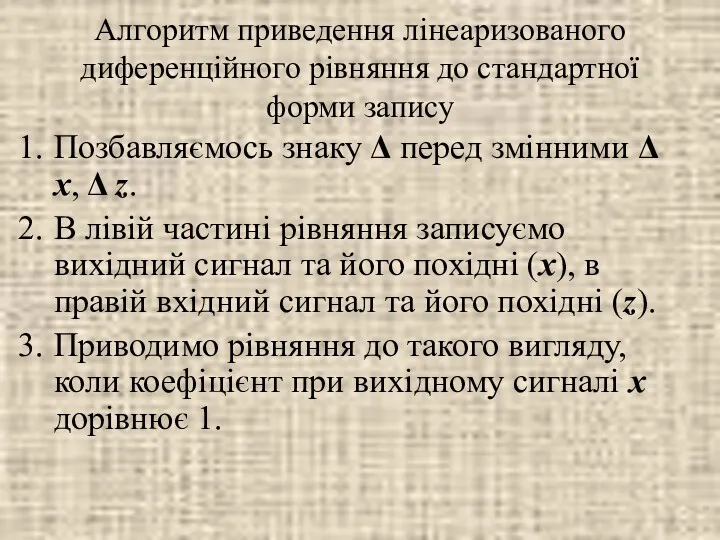
Алгоритм приведення лінеаризованого диференційного рівняння до стандартної форми запису
Позбавляємось знаку Δ
Алгоритм приведення лінеаризованого диференційного рівняння до стандартної форми запису
Позбавляємось знаку Δ
Питання 3.
Передаточна функція
Питання 3.
Передаточна функція
Пьер Симон Лаплас
23.03.1749 - 05.03.1827
«То, что мы знаем, так ничтожно
Пьер Симон Лаплас
23.03.1749 - 05.03.1827
«То, что мы знаем, так ничтожно
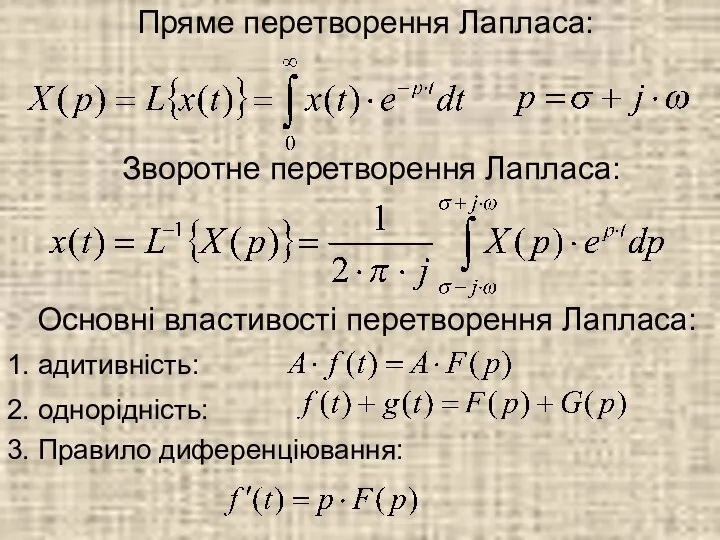
Пряме перетворення Лапласа:
Зворотне перетворення Лапласа:
Основні властивості перетворення Лапласа:
1. адитивність:
2. однорідність:
3. Правило
Пряме перетворення Лапласа:
Зворотне перетворення Лапласа:
Основні властивості перетворення Лапласа:
1. адитивність:
2. однорідність:
3. Правило
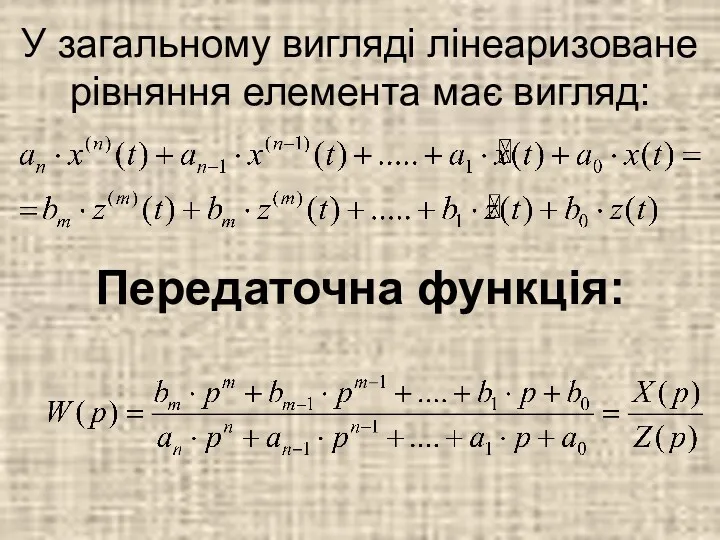
Передаточна функція:
У загальному вигляді лінеаризоване рівняння елемента має вигляд:
Передаточна функція:
У загальному вигляді лінеаризоване рівняння елемента має вигляд:
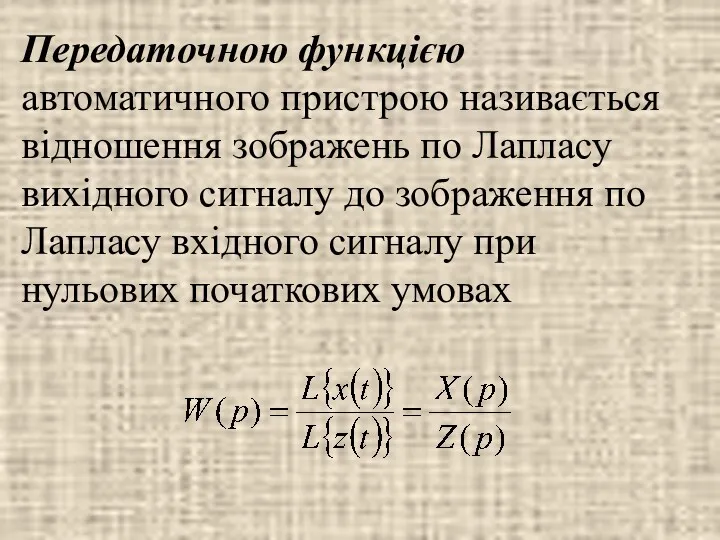
Передаточною функцією автоматичного пристрою називається відношення зображень по Лапласу вихідного сигналу
Передаточною функцією автоматичного пристрою називається відношення зображень по Лапласу вихідного сигналу
Питання 4.
Стуктурно-динамічні схеми систем автоматики та їх перетворення.
Питання 4.
Стуктурно-динамічні схеми систем автоматики та їх перетворення.
В системах автоматичного управління застосовуються наступні з’єднання елементів:
послідовне;
узгоджено-паралельне;
зустрічно-паралельне.
В системах автоматичного управління застосовуються наступні з’єднання елементів:
послідовне;
узгоджено-паралельне;
зустрічно-паралельне.
Структурно-динамічна схема послідовного з’єднання
Передаточна функція послідовного поєднання ланок дорівнює добутку передаточних
Структурно-динамічна схема послідовного з’єднання
Передаточна функція послідовного поєднання ланок дорівнює добутку передаточних
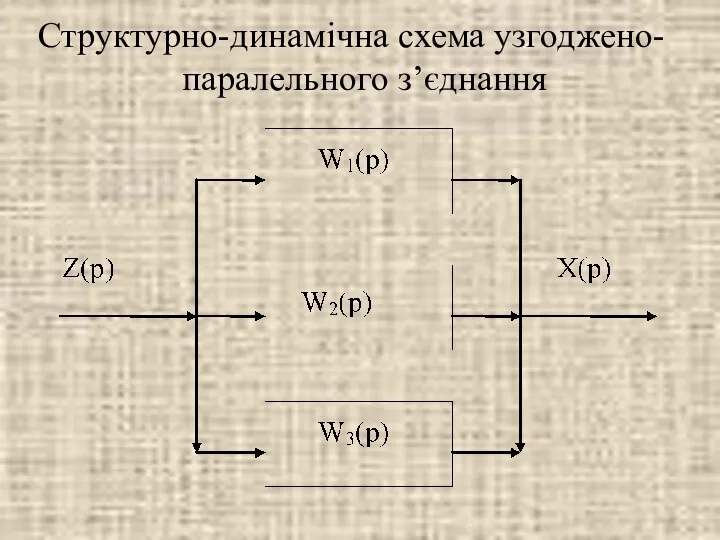
Структурно-динамічна схема узгоджено-паралельного з’єднання
Структурно-динамічна схема узгоджено-паралельного з’єднання
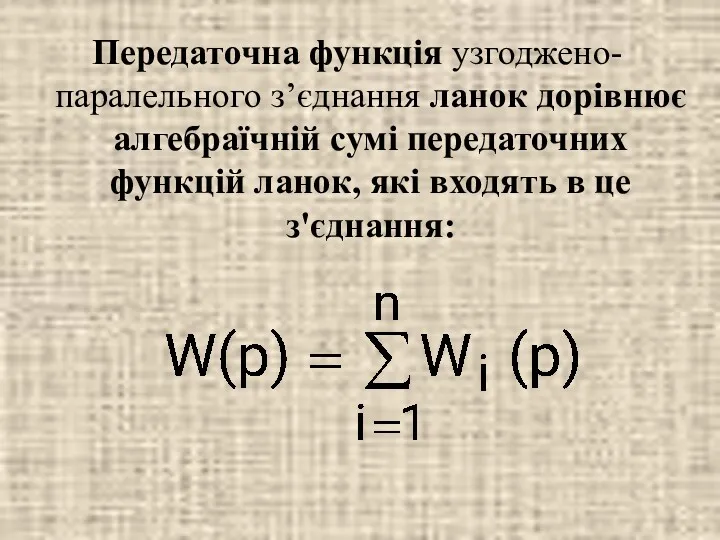
Передаточна функція узгоджено-паралельного з’єднання ланок дорівнює алгебраїчній сумі передаточних функцій ланок,
Передаточна функція узгоджено-паралельного з’єднання ланок дорівнює алгебраїчній сумі передаточних функцій ланок,
Структурно-динамічна схема зустрічно-паралельного з’єднання
Структурно-динамічна схема зустрічно-паралельного з’єднання
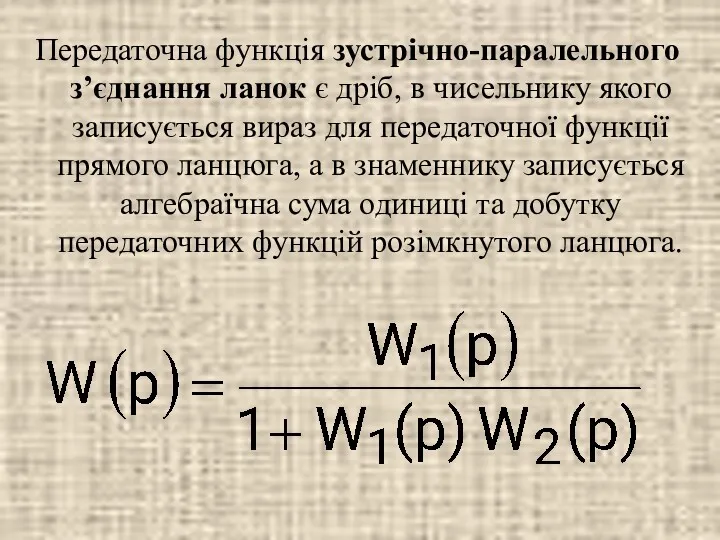
Передаточна функція зустрічно-паралельного з’єднання ланок є дріб, в чисельнику якого записується
Передаточна функція зустрічно-паралельного з’єднання ланок є дріб, в чисельнику якого записується
 Солнечные коллекторы
Солнечные коллекторы Загальні закономірності горіння рідин
Загальні закономірності горіння рідин Динамика вращательного движения твердого тела. Лекция 5
Динамика вращательного движения твердого тела. Лекция 5 Денелердің жылулық сәуле шығаруы. Тепловизорлар
Денелердің жылулық сәуле шығаруы. Тепловизорлар Физика и техника (7 класс)
Физика и техника (7 класс)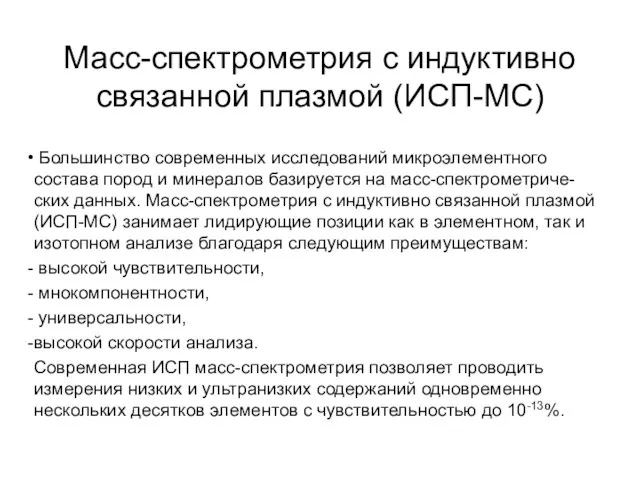 Масс-спектрометрия с индуктивно связанной плазмой (ИСП-МС)
Масс-спектрометрия с индуктивно связанной плазмой (ИСП-МС) Теплова дія струму. Закон Джоуля – Ленца. Урок 58
Теплова дія струму. Закон Джоуля – Ленца. Урок 58 Физическая игра Наряди ёлку
Физическая игра Наряди ёлку Испарение. Поглощение энергии при испарении и выделение её при конденсации пара
Испарение. Поглощение энергии при испарении и выделение её при конденсации пара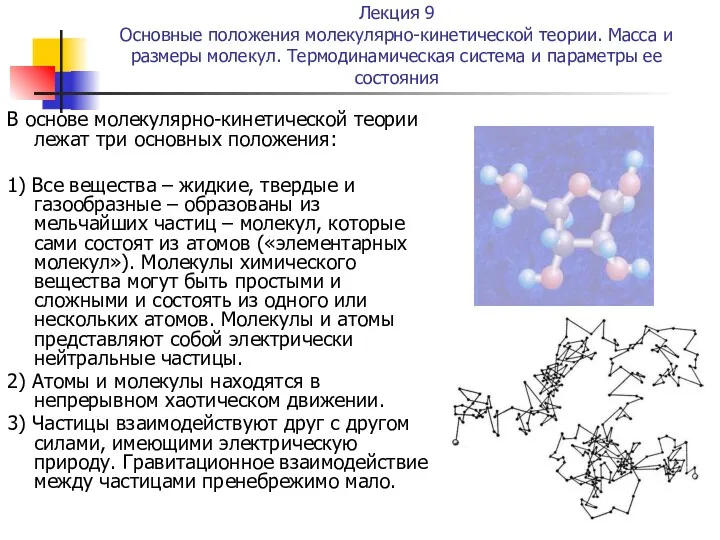 Основные положения молекулярно-кинетической теории. Масса и размеры молекул. Термодинамическая система и параметры ее состояния
Основные положения молекулярно-кинетической теории. Масса и размеры молекул. Термодинамическая система и параметры ее состояния Коливальний рух у природі і техніці
Коливальний рух у природі і техніці Петрофизика как прикладная наука
Петрофизика как прикладная наука Прикладная голография. Техника голографического эксперимента. (Лекция 7)
Прикладная голография. Техника голографического эксперимента. (Лекция 7) Трансмиссия. Коробки передач
Трансмиссия. Коробки передач Переменный ток
Переменный ток Закон Ома для участка цепи
Закон Ома для участка цепи Развитие взглядов на природу света. Волновые и квантовые свойства света
Развитие взглядов на природу света. Волновые и квантовые свойства света Газовая турбина. Реактивные двигатели
Газовая турбина. Реактивные двигатели Механік - моя спеціальність
Механік - моя спеціальність Презентация по теме:Тепловые двигатели
Презентация по теме:Тепловые двигатели Основы классической термодинамики. Первое начало термодинамики. (Лекция 10)
Основы классической термодинамики. Первое начало термодинамики. (Лекция 10) Услуги по переоборудованию автомобиля ВАЗ-2115
Услуги по переоборудованию автомобиля ВАЗ-2115 Рентгеновское излучение. Открытие рентгеновских лучей
Рентгеновское излучение. Открытие рентгеновских лучей Игра - кто хочет стать миллионером. Законы Ньютона.
Игра - кто хочет стать миллионером. Законы Ньютона. Люди нашего края Голобоков
Люди нашего края Голобоков Дифференциальная геометрия
Дифференциальная геометрия Система стабилизации курсовой устойчивости esp. Урок № 197
Система стабилизации курсовой устойчивости esp. Урок № 197 Решение задач
Решение задач