- Приведение произвольной системы сил к центру

Содержание
- 2. План лекции Введение. Две основные задачи статики. Лемма о параллельном переносе силы. Главный вектор и главный
- 3. На предыдущей лекции ВВЕДЕНИЕ В статике твердого тела, которую мы изучаем, решаются две основные задачи. (см.
- 4. Цель лекции ВВЕДЕНИЕ Доказать основную теорему статики. Получить универсальный метод решения задач на равновесие тел –
- 5. ВВЕДЕНИЕ Зададим вопрос: к какому простейшему виду можно привести любую заданную систему сил? Для ответа на
- 6. Лемма о параллельном переносе силы Не изменяя действие силы на тело, силу можно перенести параллельно самой
- 7. Сальвадор Дали Невольничий рынок с явлением незримого бюста Вольтера
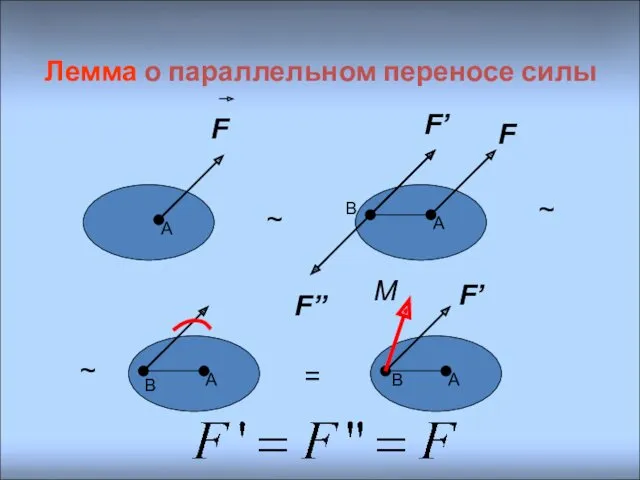
- 8. Лемма о параллельном переносе силы A ~ ~ ~ B A = F F’ F” F
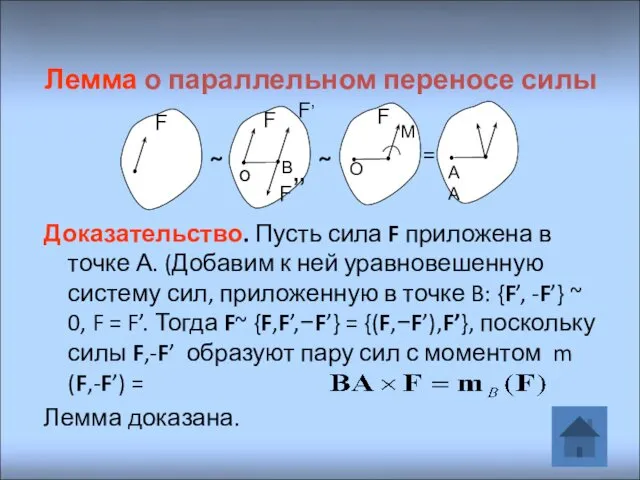
- 9. Лемма о параллельном переносе силы Доказательство. Пусть сила F приложена в точке А. (Добавим к ней
- 10. Иллюстрация Если удерживать рукой однородный брусок весом P за его середину (рис. а), то нужно просто
- 11. Главный вектор и главный момент системы сил Главный вектор данной системы сил – вектор равный геометрической
- 12. Главный вектор и главный момент системы сил Главный вектор системы сил от выбора центра приведения не
- 13. Основная теорема статики Теорема. Произвольную систему сил можно заменить совокупностью одной силы, приложенной в произвольно выбранной
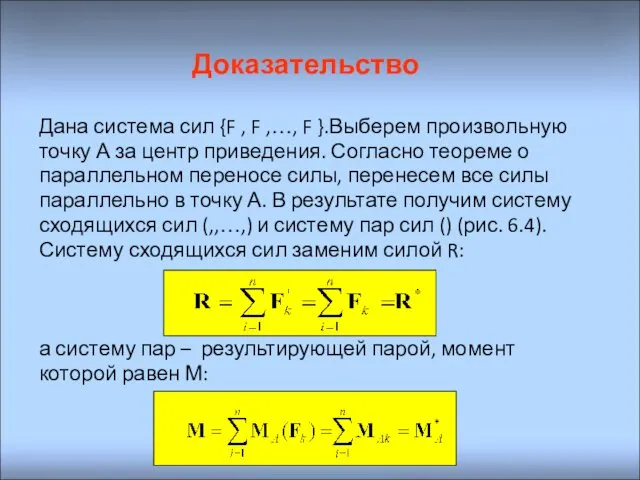
- 14. Доказательство Дана система сил {F , F ,…, F }.Выберем произвольную точку А за центр приведения.
- 15. Критерий эквивалентности Основная теорема статики позволяет сформулировать Критерий эквивалентности действия на абсолютно твердое тело различных систем
- 16. Аналитическое определение главного вектора и главного момента = = = Т.о. вычисление главного вектора и главного
- 17. Немного истории Французский механик Луи Пуансо (Poinsot) (1777-1859) доказал основную теорему статики в 1804 г.
- 18. ПРИМЕР Задача. Привести к центру О систему сил P, F1, F2, F3 (рис. 6.5), если Р
- 19. Условия равновесия произвольной системы сил Любая система сил будет эквивалентна нулю, если равны нулю ее главный
- 20. Условия равновесия различных систем сил Для системы параллельных сил в пространстве (линии действия параллельны оси Oz):
- 21. Условия равновесия произвольной плоской системы сил Основная форма условий равновесия: Вторая форма условий равновесия: Дополнительное условие:
- 22. Статические инварианты Инварианты – величины, неизменные при некотором преобразовании. Статические инварианты – величины, не зависящие от
- 23. Убедимся в том, что R* . - статический инвариант. Статические инварианты Умножая скалярно обе части этого
- 24. Частные случаи приведения 1. – уравновешенная система сил. 2. – Система сил приводится к равнодействующей, проходящей
- 25. Частные случаи приведения , . В этом случае система сил приводится к силе и паре сил
- 26. Мы выяснили, как решается первая задача статики – к какому простейшему виду приводится любая система сил:
- 27. Тема следующей лекции ЗАКЛЮЧЕНИЕ РАВНОВЕСИЕ СИСТЕМ ТЕЛ
- 28. Вопросы для самоконтроля 1. Сформулируйте лемму о параллельном переносе силы. 2. Что такое главный вектор системы
- 30. Скачать презентацию
План лекции
Введение. Две основные задачи статики.
Лемма о параллельном переносе силы.
Главный вектор
План лекции
Введение. Две основные задачи статики.
Лемма о параллельном переносе силы.
Главный вектор
На предыдущей лекции
ВВЕДЕНИЕ
В статике твердого тела, которую мы изучаем, решаются
На предыдущей лекции
ВВЕДЕНИЕ
В статике твердого тела, которую мы изучаем, решаются
Цель лекции
ВВЕДЕНИЕ
Доказать основную теорему статики.
Получить универсальный метод решения задач на
Цель лекции
ВВЕДЕНИЕ
Доказать основную теорему статики.
Получить универсальный метод решения задач на
ВВЕДЕНИЕ
Зададим вопрос: к какому простейшему виду можно привести любую заданную систему
ВВЕДЕНИЕ
Зададим вопрос: к какому простейшему виду можно привести любую заданную систему
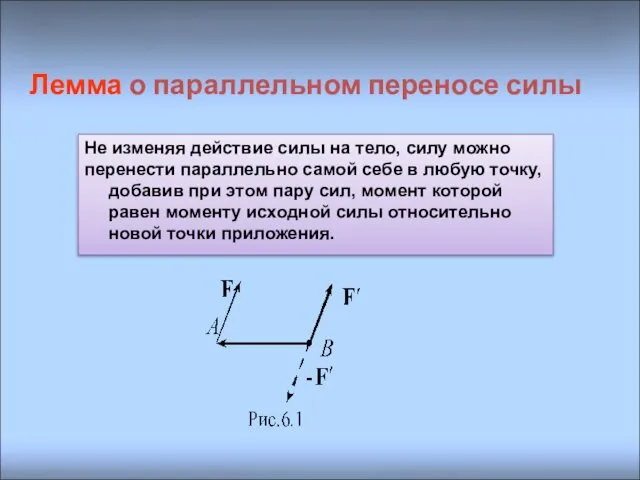
Лемма о параллельном переносе силы
Не изменяя действие силы на тело,
Лемма о параллельном переносе силы
Не изменяя действие силы на тело,
Сальвадор Дали
Невольничий рынок с явлением
незримого бюста Вольтера
Сальвадор Дали
Невольничий рынок с явлением
незримого бюста Вольтера
Лемма о параллельном переносе силы
A
~
~
~
B
A
=
F
F’
F”
F
B
B
F’
M
Лемма о параллельном переносе силы
A
~
~
~
B
A
=
F
F’
F”
F
B
B
F’
M
Лемма о параллельном переносе силы
Доказательство. Пусть сила F приложена в точке
Лемма о параллельном переносе силы
Доказательство. Пусть сила F приложена в точке
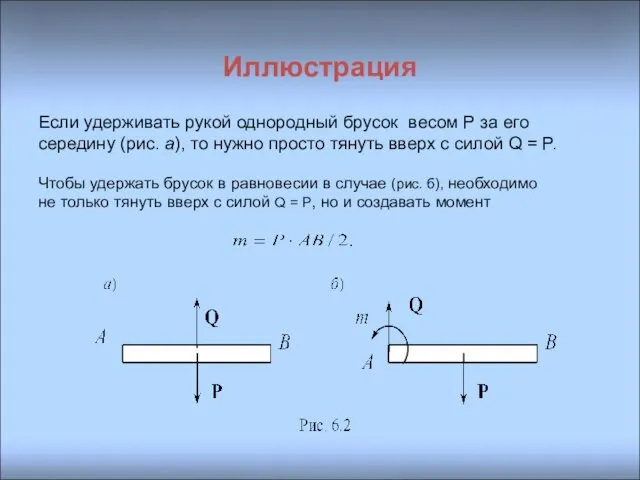
Иллюстрация
Если удерживать рукой однородный брусок весом P за его
середину (рис. а), то
Иллюстрация
Если удерживать рукой однородный брусок весом P за его
середину (рис. а), то
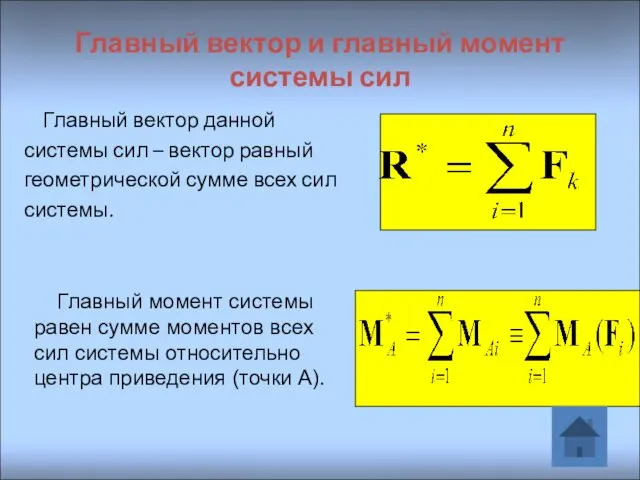
Главный вектор и главный момент системы сил
Главный вектор данной
системы
Главный вектор и главный момент системы сил
Главный вектор данной
системы
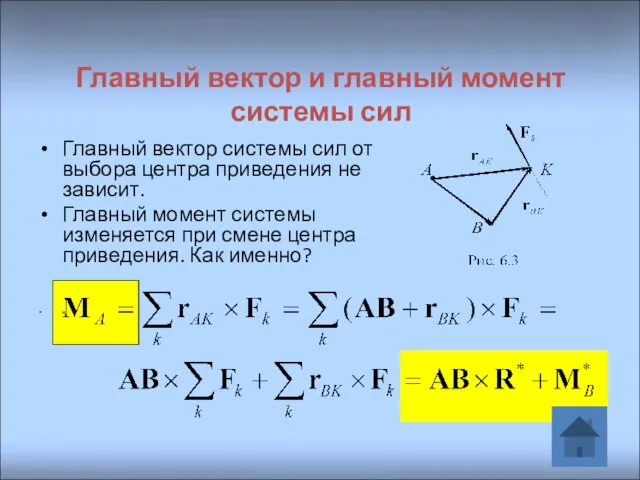
Главный вектор и главный момент системы сил
Главный вектор системы сил от
Главный вектор и главный момент системы сил
Главный вектор системы сил от
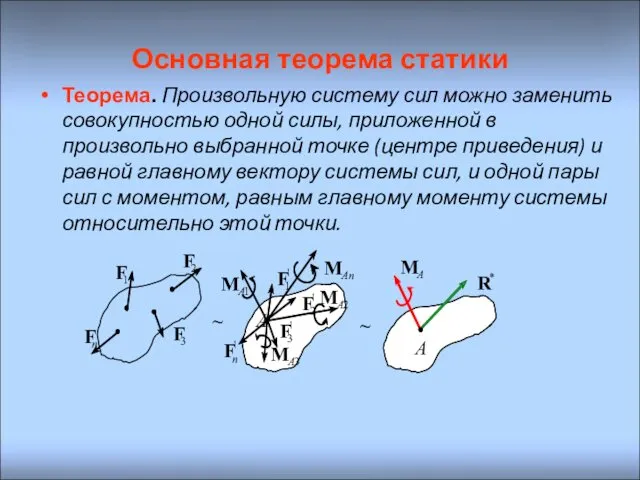
Основная теорема статики
Теорема. Произвольную систему сил можно заменить совокупностью одной силы,
Основная теорема статики
Теорема. Произвольную систему сил можно заменить совокупностью одной силы,
Доказательство
Дана система сил {F , F ,…, F }.Выберем произвольную
точку
Доказательство
Дана система сил {F , F ,…, F }.Выберем произвольную
точку
Критерий эквивалентности
Основная теорема статики позволяет сформулировать
Критерий эквивалентности действия на абсолютно
Критерий эквивалентности
Основная теорема статики позволяет сформулировать
Критерий эквивалентности действия на абсолютно
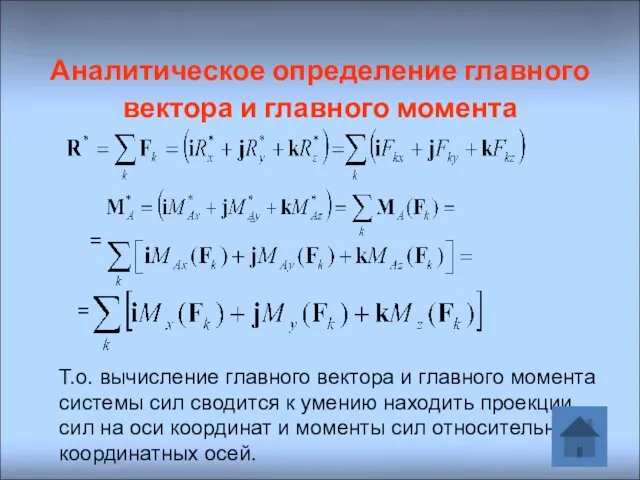
Аналитическое определение главного вектора и главного момента
=
=
=
Аналитическое определение главного вектора и главного момента
=
=
=
Немного истории
Французский механик
Луи Пуансо (Poinsot)
(1777-1859) доказал
основную теорему
статики в 1804 г.
Немного истории
Французский механик
Луи Пуансо (Poinsot)
(1777-1859) доказал
основную теорему
статики в 1804 г.
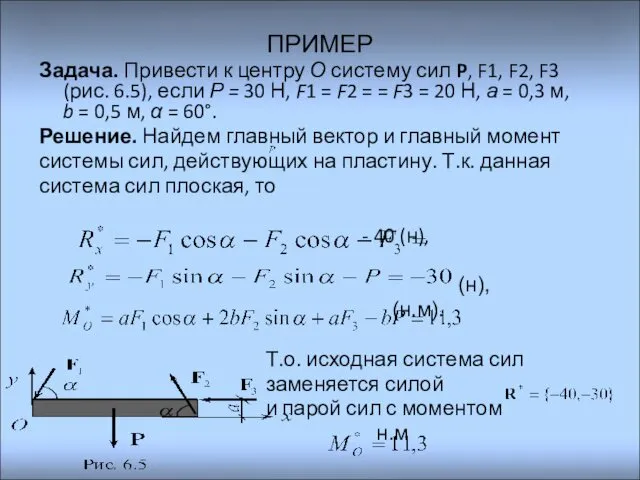
ПРИМЕР
Задача. Привести к центру О систему сил P, F1, F2, F3
ПРИМЕР
Задача. Привести к центру О систему сил P, F1, F2, F3
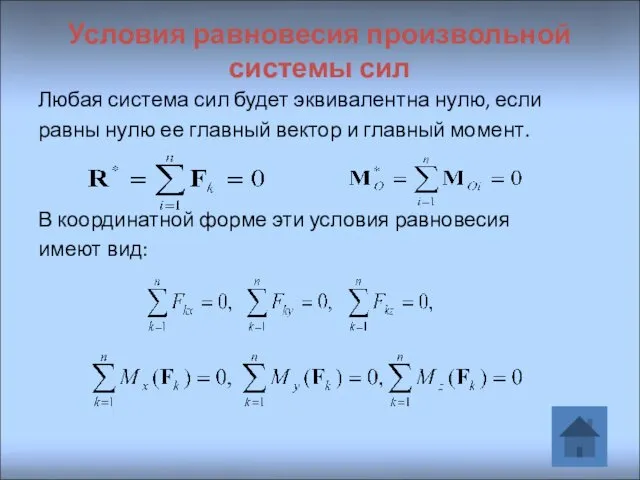
Условия равновесия произвольной системы сил
Любая система сил будет эквивалентна нулю, если
равны
Условия равновесия произвольной системы сил
Любая система сил будет эквивалентна нулю, если
равны
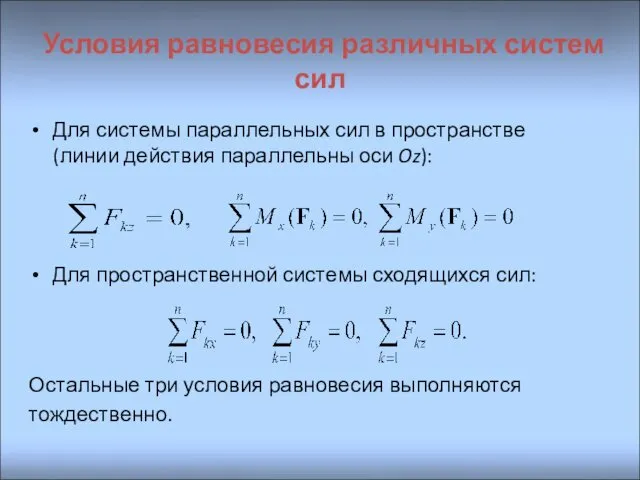
Условия равновесия различных систем сил
Для системы параллельных сил в пространстве (линии
Условия равновесия различных систем сил
Для системы параллельных сил в пространстве (линии
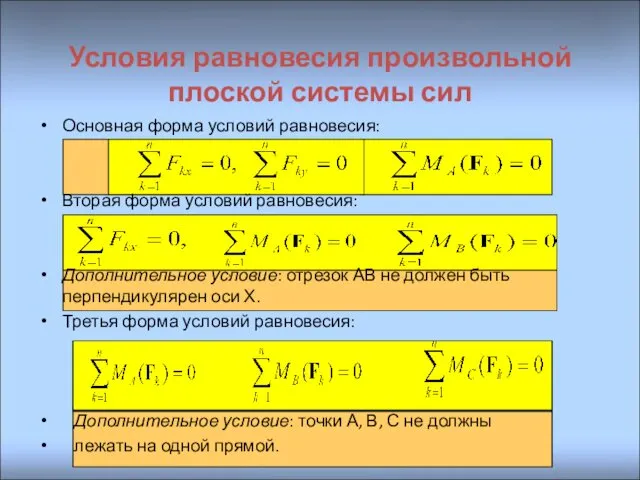
Условия равновесия произвольной плоской системы сил
Основная форма условий равновесия:
Вторая форма условий
Условия равновесия произвольной плоской системы сил
Основная форма условий равновесия:
Вторая форма условий
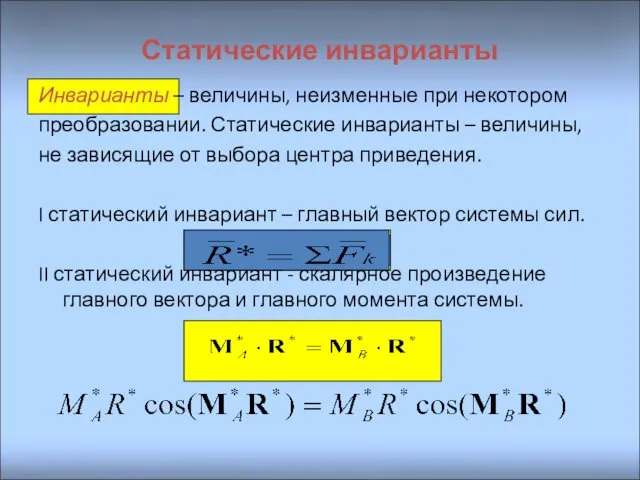
Статические инварианты
Инварианты – величины, неизменные при некотором
преобразовании. Статические инварианты –
Статические инварианты
Инварианты – величины, неизменные при некотором
преобразовании. Статические инварианты –
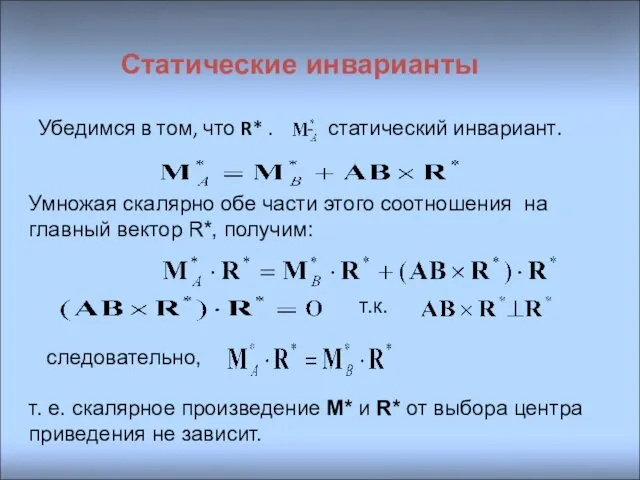
Убедимся в том, что R* . - статический инвариант.
Статические инварианты
Умножая
Убедимся в том, что R* . - статический инвариант.
Статические инварианты
Умножая
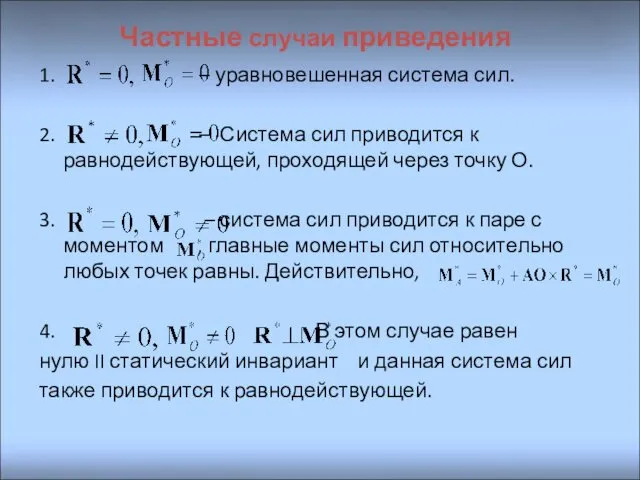
Частные случаи приведения
1. – уравновешенная система сил.
2. – Система сил
Частные случаи приведения
1. – уравновешенная система сил.
2. – Система сил
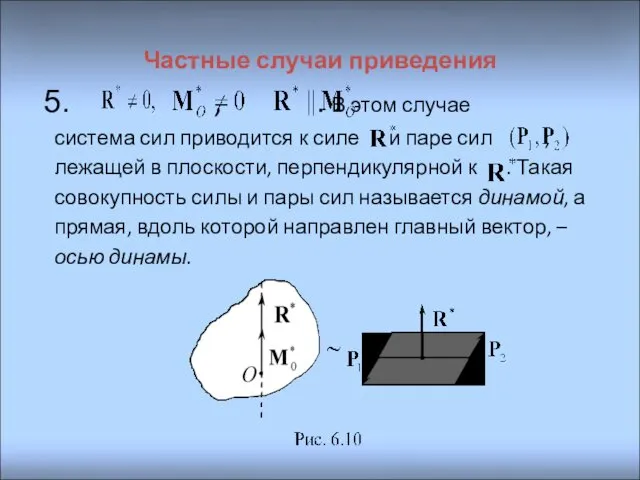
Частные случаи приведения
, . В этом случае
система сил приводится
Частные случаи приведения
, . В этом случае
система сил приводится
Мы выяснили, как решается первая задача статики –
к
Мы выяснили, как решается первая задача статики –
к
Тема следующей лекции
ЗАКЛЮЧЕНИЕ
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Тема следующей лекции
ЗАКЛЮЧЕНИЕ
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Вопросы для самоконтроля
1. Сформулируйте лемму о параллельном
переносе силы.
2. Что такое главный
Вопросы для самоконтроля
1. Сформулируйте лемму о параллельном
переносе силы.
2. Что такое главный
 Количество теплоты. 8 класс
Количество теплоты. 8 класс Цепная передача (зацеплением)
Цепная передача (зацеплением) Теорема Гаусса для диэлектриков
Теорема Гаусса для диэлектриков Биохимический анализ. Фотометрия. Основные принципы
Биохимический анализ. Фотометрия. Основные принципы Разработка технологического процесса механической обработки и проектирование участка механического цеха детали Фланец 03
Разработка технологического процесса механической обработки и проектирование участка механического цеха детали Фланец 03 Мұнай және газ механикасы
Мұнай және газ механикасы Фотометрия. Энергетические характеристики света
Фотометрия. Энергетические характеристики света 1 раунд игры (своя игра)
1 раунд игры (своя игра) Принцип возможных перемещений (§1 - §6)
Принцип возможных перемещений (§1 - §6) Электрический ток в жидкостях. Закон электролиза
Электрический ток в жидкостях. Закон электролиза Внутрипредметные связи при изучении гармонических колебаний
Внутрипредметные связи при изучении гармонических колебаний Учимся находить плотность веществ
Учимся находить плотность веществ Закон Ома
Закон Ома Лампа накаливания
Лампа накаливания Ремонт тормозной рычажной передачи электровоза ВЛ-10
Ремонт тормозной рычажной передачи электровоза ВЛ-10 Электрическое поле, его характеристики, свойства. Поле диполя. (Лекция 4)
Электрическое поле, его характеристики, свойства. Поле диполя. (Лекция 4) Научно- исследовательская работа Уникальность Останкинской телевизионной башни
Научно- исследовательская работа Уникальность Останкинской телевизионной башни О пользе и вреде электризации
О пользе и вреде электризации Исследовательская работа Посудомоечная машина
Исследовательская работа Посудомоечная машина Электрический ток. Условия, необходимые для существования электрического тока. Закон Ома
Электрический ток. Условия, необходимые для существования электрического тока. Закон Ома Устройство велосипеда
Устройство велосипеда Изобретение радио А.С. Поповым
Изобретение радио А.С. Поповым Виды дифференциалов
Виды дифференциалов Элементы квантовой теории (продолжение). Лекция 10
Элементы квантовой теории (продолжение). Лекция 10 Механічний рух. Відносність руху. Траєкторія. Час, який пройшло тіло. Одиниці швидкості
Механічний рух. Відносність руху. Траєкторія. Час, який пройшло тіло. Одиниці швидкості Принцип работы, устройство ,техническое обслуживание и ремонт ведущего моста ЗИЛ-130
Принцип работы, устройство ,техническое обслуживание и ремонт ведущего моста ЗИЛ-130 Сверхпроводимость II рода. Криогенные и сверхпроводящие электроэнергетические устройства. Лекция 3
Сверхпроводимость II рода. Криогенные и сверхпроводящие электроэнергетические устройства. Лекция 3 Электрический ток в газах
Электрический ток в газах