- Промышленные роботы (манипуляторы)

Содержание
- 2. Промышленные роботы Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора) и системы управления. Исполнительный
- 3. Промышленный робот (продолжение) Робот-манипулятор Кинематическая схема
- 4. Манипулятор Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека (латинское «manipulus» - пригоршня).
- 5. Назначение и область применения роботов Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных
- 6. Классификация промышленных роботов 1. По характеру выполняемых технологических операций - основные; - вспомогательные; - универсальные. 2.
- 7. Классификация промышленных роботов (продолжение) 4. По виду производства: - литейные; - сварочные; - кузнечно-прессовые; - для
- 8. Классификация промышленных роботов (продолжение) 7. По типу силового привода: - электромеханический; - пневматический; - гидравлический; комбинированный.
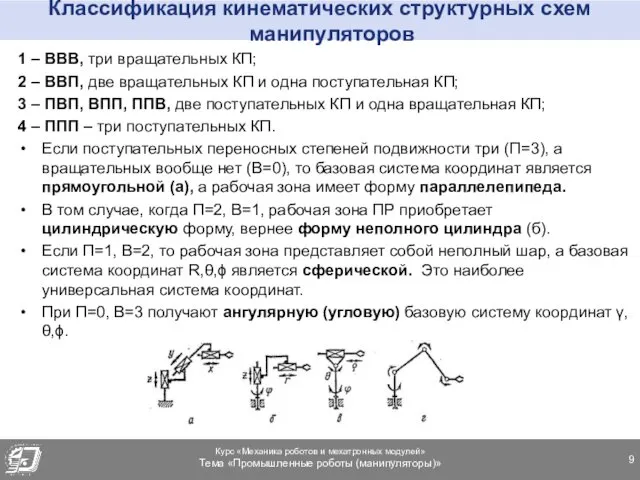
- 9. Классификация кинематических структурных схем манипуляторов 1 – ВВВ, три вращательных КП; 2 – ВВП, две вращательных
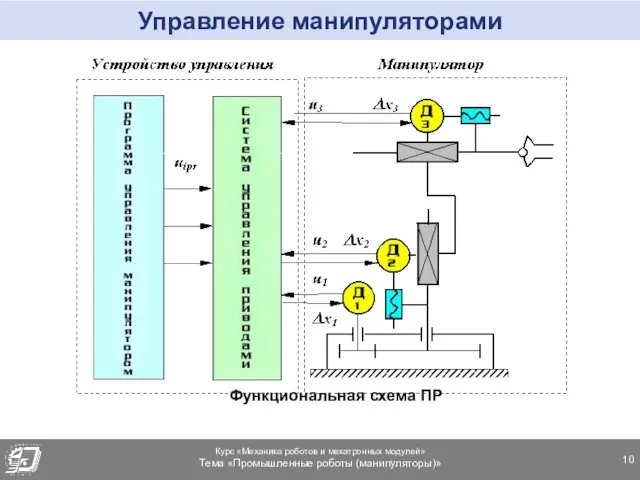
- 10. Управление манипуляторами Функциональная схема ПР
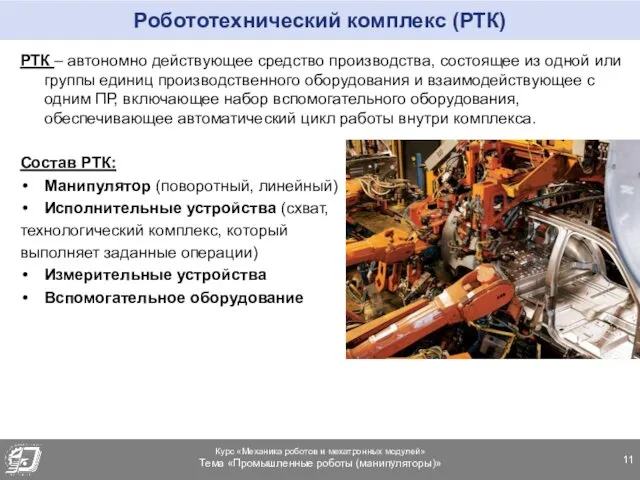
- 11. Робототехнический комплекс (РТК) РТК – автономно действующее средство производства, состоящее из одной или группы единиц производственного
- 12. Робототехнический комплекс (продолжение) РТК – это наиболее эффективное средство решения задач комплексной автоматизации, работающее по принципу
- 13. Автоматизация производства Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства и математические методы с
- 14. Автоматизированная система управления производством
- 15. История робототехники Термину «робот» в 2011 году исполнилось 90 лет. Это широко использующееся сейчас слово впервые
- 16. Поколения промышленных роботов Манипуляторы с автоматическим управлением называются промышленными роботами. ПР по степени совершенства принято делить
- 17. Поколения промышленных роботов (продолжение) Роботы 2-го поколения – устройства, приспособленные к изменяющейся внешней обстановке и не
- 18. Поколения промышленных роботов (продолжение) Роботы 3-го поколения способны выбирать способ движения в зависимости от окружающей обстановки
- 19. Интеллектуальные роботы Персоналии Павловский Владимир Евгеньевич Доктор физико-математических наук Институт прикладной математики им. М.В. Келдыша РАН,
- 20. Промышленные роботы ABB Robotics Робот IRB 2400
- 21. Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH) Основные элементы робота Общий вид
- 22. Научно-технические проблемы создания и совершенствования робототехнических систем Основное требование, предъявляемое к роботам - качественное выполнение двигательных
- 23. Заключение Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и системы управления (позволяющей перепрограммировать
- 25. Скачать презентацию

Промышленные роботы
Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора)
Промышленные роботы
Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора)

Промышленный робот (продолжение)
Робот-манипулятор Кинематическая схема
Промышленный робот (продолжение)
Робот-манипулятор Кинематическая схема
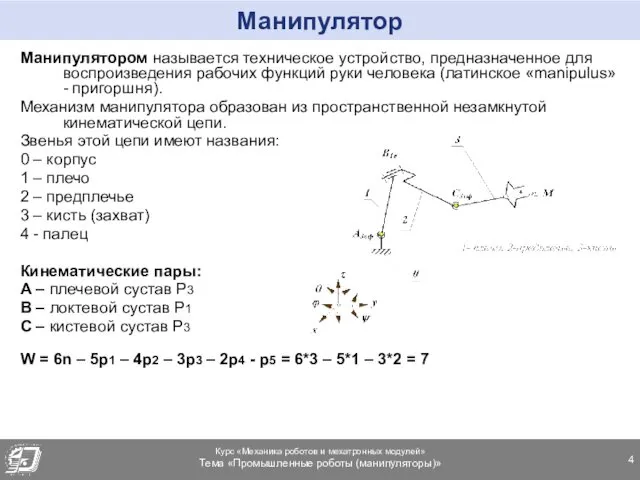
Манипулятор
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека
Манипулятор
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека

Назначение и область применения роботов
Промышленные роботы предназначены для замены человека при
Назначение и область применения роботов
Промышленные роботы предназначены для замены человека при
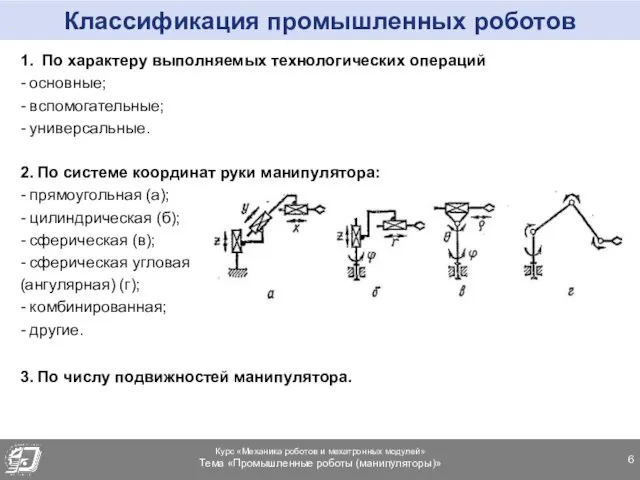
Классификация промышленных роботов
1. По характеру выполняемых технологических операций
- основные;
-
Классификация промышленных роботов
1. По характеру выполняемых технологических операций
- основные;
-
Классификация промышленных роботов (продолжение)
4. По виду производства:
- литейные;
- сварочные;
- кузнечно-прессовые;
-
Классификация промышленных роботов (продолжение)
4. По виду производства:
- литейные;
- сварочные;
- кузнечно-прессовые;
-
Классификация промышленных роботов (продолжение)
7. По типу силового привода:
- электромеханический;
-
Классификация промышленных роботов (продолжение)
7. По типу силового привода:
- электромеханический;
-
Классификация кинематических структурных схем манипуляторов
1 – ВВВ, три вращательных КП;
2
Классификация кинематических структурных схем манипуляторов
1 – ВВВ, три вращательных КП;
2
Управление манипуляторами
Функциональная схема ПР
Управление манипуляторами
Функциональная схема ПР
Робототехнический комплекс (РТК)
РТК – автономно действующее средство производства, состоящее из одной
Робототехнический комплекс (РТК)
РТК – автономно действующее средство производства, состоящее из одной

Робототехнический комплекс (продолжение)
РТК – это наиболее эффективное средство решения задач комплексной
Робототехнический комплекс (продолжение)
РТК – это наиболее эффективное средство решения задач комплексной

Автоматизация производства
Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства
Автоматизация производства
Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства

Автоматизированная система управления производством
Автоматизированная система управления производством
История робототехники
Термину «робот» в 2011 году исполнилось 90 лет.
Это широко использующееся
История робототехники
Термину «робот» в 2011 году исполнилось 90 лет.
Это широко использующееся

Поколения промышленных роботов
Манипуляторы с автоматическим управлением называются промышленными роботами.
ПР по степени
Поколения промышленных роботов
Манипуляторы с автоматическим управлением называются промышленными роботами.
ПР по степени

Поколения промышленных роботов (продолжение)
Роботы 2-го поколения – устройства, приспособленные к изменяющейся
Поколения промышленных роботов (продолжение)
Роботы 2-го поколения – устройства, приспособленные к изменяющейся

Поколения промышленных роботов (продолжение)
Роботы 3-го поколения способны выбирать способ движения в
Поколения промышленных роботов (продолжение)
Роботы 3-го поколения способны выбирать способ движения в

Интеллектуальные роботы
Персоналии
Павловский Владимир Евгеньевич
Доктор физико-математических наук
Институт прикладной математики
им. М.В. Келдыша РАН,
Интеллектуальные роботы
Персоналии
Павловский Владимир Евгеньевич
Доктор физико-математических наук
Институт прикладной математики
им. М.В. Келдыша РАН,

Промышленные роботы ABB Robotics
Робот IRB 2400
Промышленные роботы ABB Robotics
Робот IRB 2400
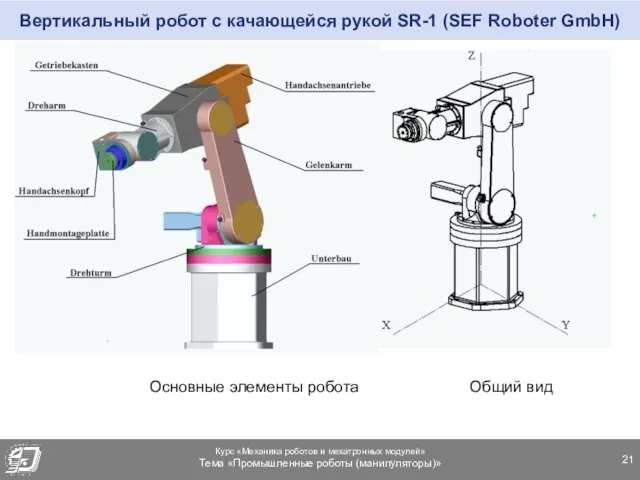
Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH)
Основные элементы робота
Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH)
Основные элементы робота
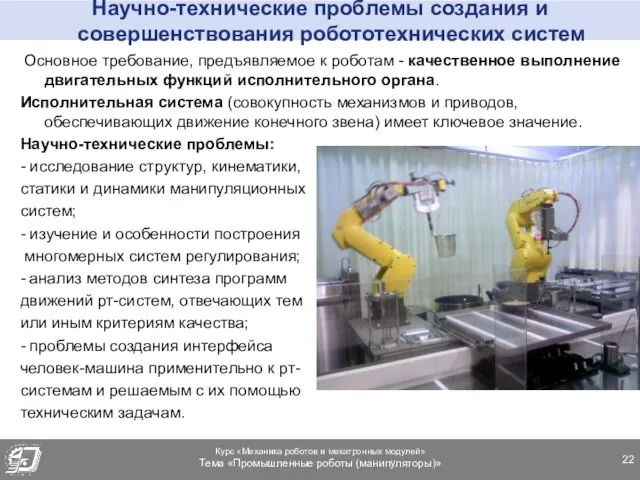
Научно-технические проблемы создания и совершенствования робототехнических систем
Основное требование, предъявляемое к
Научно-технические проблемы создания и совершенствования робототехнических систем
Основное требование, предъявляемое к
Заключение
Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и
Заключение
Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и
 Уравнения электромеханической и механической характеристик асинхронного двигателя и их анализ
Уравнения электромеханической и механической характеристик асинхронного двигателя и их анализ Закон сохранения механической энергии
Закон сохранения механической энергии Урок физики в 7 классе с использованием ЭОР Простые механизмы. Рычаг
Урок физики в 7 классе с использованием ЭОР Простые механизмы. Рычаг Механическое движение. Материальная точка. Система отсчета
Механическое движение. Материальная точка. Система отсчета Магнитное поле в веществе
Магнитное поле в веществе Индивидуальный проект на тему: Modern cars
Индивидуальный проект на тему: Modern cars Занимательные опыты по физике
Занимательные опыты по физике Электродинамика
Электродинамика Звук и ультразвук. (Лекция 8)
Звук и ультразвук. (Лекция 8) МКТ. Строение вещества
МКТ. Строение вещества The photon and thefor vacuum cleaner
The photon and thefor vacuum cleaner Атмосферное давление. Урок физики. 7 класс
Атмосферное давление. Урок физики. 7 класс Термодинамика диэлектриков. Типы диэлектриков, свойства и применение. Лекция №5
Термодинамика диэлектриков. Типы диэлектриков, свойства и применение. Лекция №5 Конспект урока. Сила упругости. Закон Гука
Конспект урока. Сила упругости. Закон Гука Физические величины и их математическая размерность
Физические величины и их математическая размерность Гидравлические сопротивления и потери энергии
Гидравлические сопротивления и потери энергии Теория атома водорода по Бору
Теория атома водорода по Бору Проектирование узла измерения тока саморазряда электрохимического источника питания
Проектирование узла измерения тока саморазряда электрохимического источника питания Механические волны. 9 класс
Механические волны. 9 класс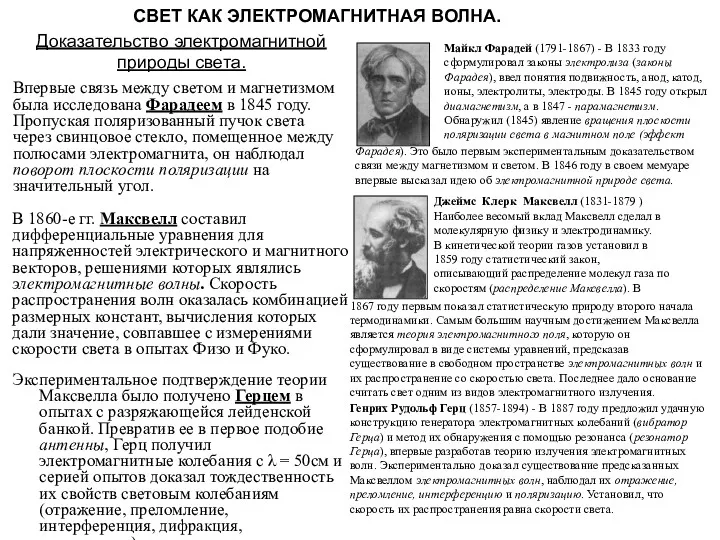 Свет как электромагнитная волна
Свет как электромагнитная волна Импульс. Закон сохранения импульса
Импульс. Закон сохранения импульса Презентация к уроку физики по теме Электрические явления
Презентация к уроку физики по теме Электрические явления Разность потенциалов. Эквипотенциальные поверхности
Разность потенциалов. Эквипотенциальные поверхности Статическое электричество, защита от него. Молниеотвод
Статическое электричество, защита от него. Молниеотвод Планетарная модель атома. Постулаты Бора. Спектры
Планетарная модель атома. Постулаты Бора. Спектры Производство электроэнергии в России. 11 класс
Производство электроэнергии в России. 11 класс Внутрішнє тертя
Внутрішнє тертя Взаимодействие тел. Второй закон Ньютона
Взаимодействие тел. Второй закон Ньютона