- Расчет сооружений методом конечных элементов. (Лекция 6)

Содержание
- 2. Современная вычислительная техника позволяет проводить расчеты сооружений с более подробным описанием их внутренней структуры и с
- 3. Например, в МКЭ используются элементы в виде плоского стержня: ферменный КЭ и стержневой КЭ. ферменный КЭ
- 4. В расчетах плоских тел используются треугольный или четырехугольный КЭ: Для расчета разных сооружений разработано множество других
- 5. МКЭ – дискретный метод, основанный на изучении НДС сооружения в ее отдельных (дискретных) точках. В этом
- 6. 2. Вариационные основы МКЭ При решении многих задач статики, динамики и устойчивости сооружений определяется полная потенциальная
- 7. 3. Аппроксимация КЭ При выборе конечно-элементной модели сооружения можно вводить узлы с разным числом степеней свободы.
- 8. В пространственной системе узлы могут иметь шесть или три степени свободы: Степени свободы и соответствующие перемещения
- 9. Потом вводятся специальные аппроксимирующие функции, связывающие перемещения внутренних точек КЭ через перемещения ее узлов. Тогда получаются:
- 10. Например, − матрица жесткости ферменного элемента (n=2): − матрица жесткости стержневого элемента (n=6):
- 11. 4. Переход к общей системе координат Каждый КЭ в МКЭ вначале рассматривается в местной системе координат.
- 12. 5. Объединение конечных элементов Если в расчетной модели сооружения имеется m КЭ, то матрицы жесткостей и
- 13. 8. Учет граничных условий Разрешающее уравнение МКЭ K u = P нельзя решить относительно перемещений u,
- 14. 9. Определение перемещений, усилий и напряжений После решения разрешающего уравнения и определения вектора узловых перемещений u,
- 15. 10. Алгоритм расчета сооружений МКЭ Состоит из следующих этапов: 1. Выбор расчетной модели. 2. Перенос нагрузки
- 16. 11. Порядок расчета по МКЭ В настоящее время разработаны вычислительные комплексы NASTRAN, ANSIS, ЛИРА, СУМРАК и
- 17. 2. Процессор – блок математического расчета МКЭ. Входящие в него компьютерные программы предназначены для: составления и
- 18. Небоскреб высотой 301 м, построен в 1980 г. в США (Техас, Хьюстон)
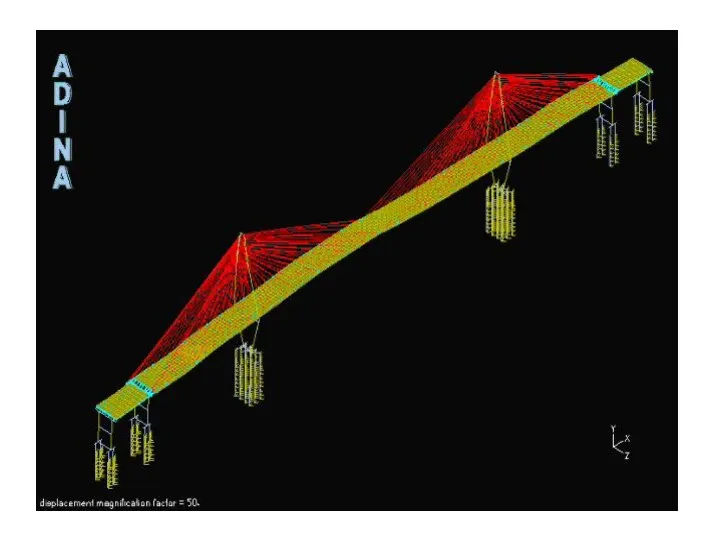
- 19. Мост в Южной Каролине, США
- 21. КЭ-ные модели элементов моста и их напряженное состояние
- 22. Расчет НДС корабля
- 23. Вантовый мост
- 25. Скачать презентацию
Современная вычислительная техника позволяет проводить расчеты сооружений с более подробным
Современная вычислительная техника позволяет проводить расчеты сооружений с более подробным
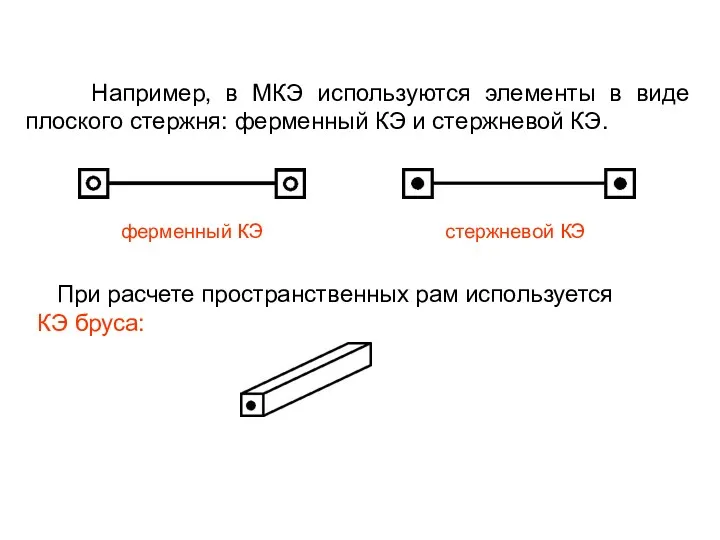
Например, в МКЭ используются элементы в виде плоского стержня: ферменный
Например, в МКЭ используются элементы в виде плоского стержня: ферменный
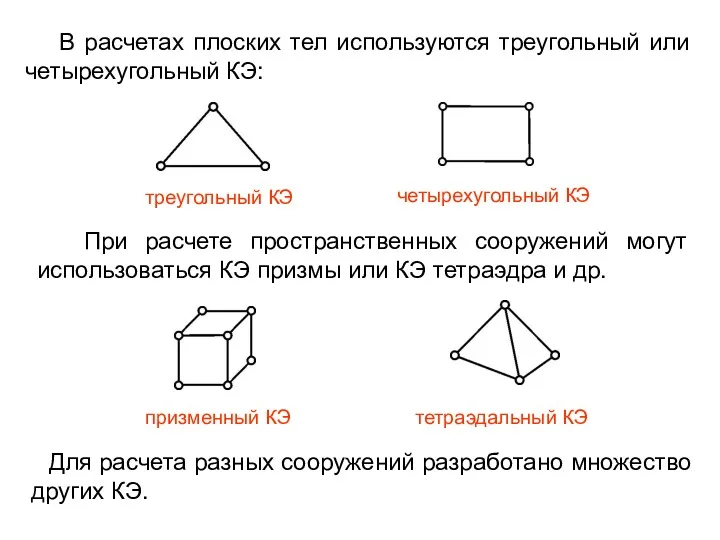
В расчетах плоских тел используются треугольный или четырехугольный КЭ:
В расчетах плоских тел используются треугольный или четырехугольный КЭ:
МКЭ – дискретный метод, основанный на изучении НДС сооружения в
МКЭ – дискретный метод, основанный на изучении НДС сооружения в
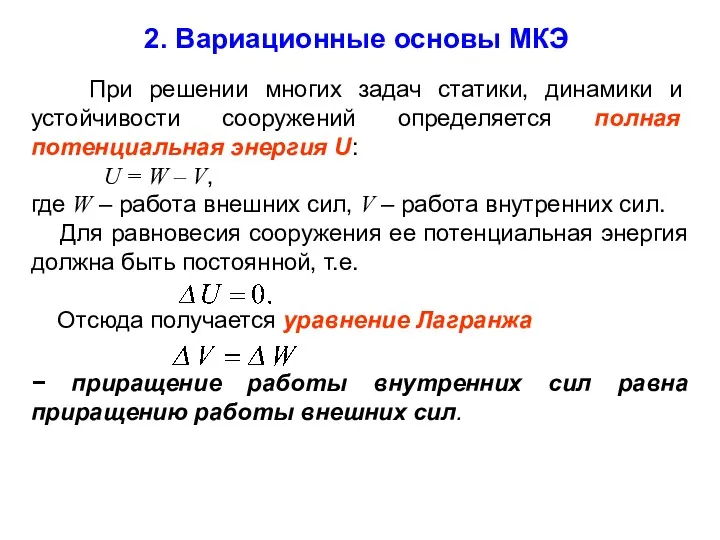
2. Вариационные основы МКЭ
При решении многих задач статики, динамики
2. Вариационные основы МКЭ
При решении многих задач статики, динамики
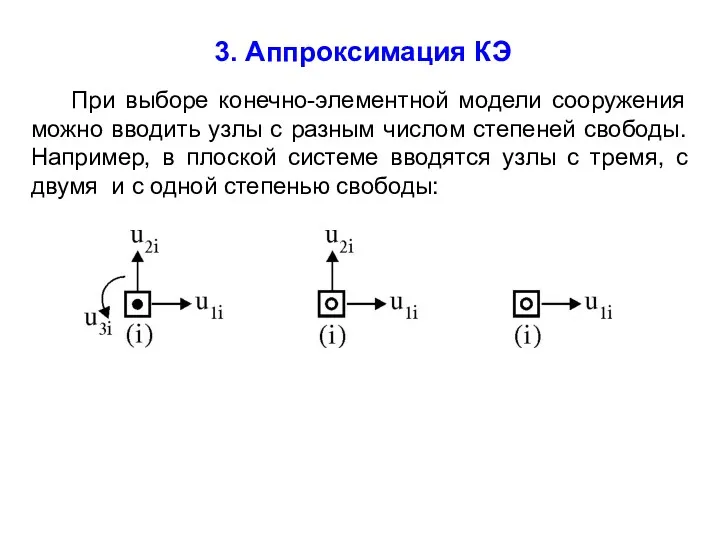
3. Аппроксимация КЭ
При выборе конечно-элементной модели сооружения можно вводить узлы
3. Аппроксимация КЭ
При выборе конечно-элементной модели сооружения можно вводить узлы
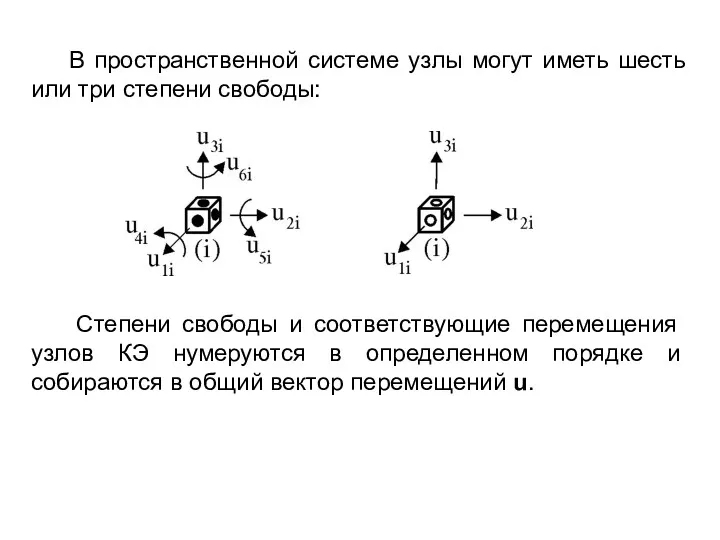
В пространственной системе узлы могут иметь шесть или три степени
В пространственной системе узлы могут иметь шесть или три степени
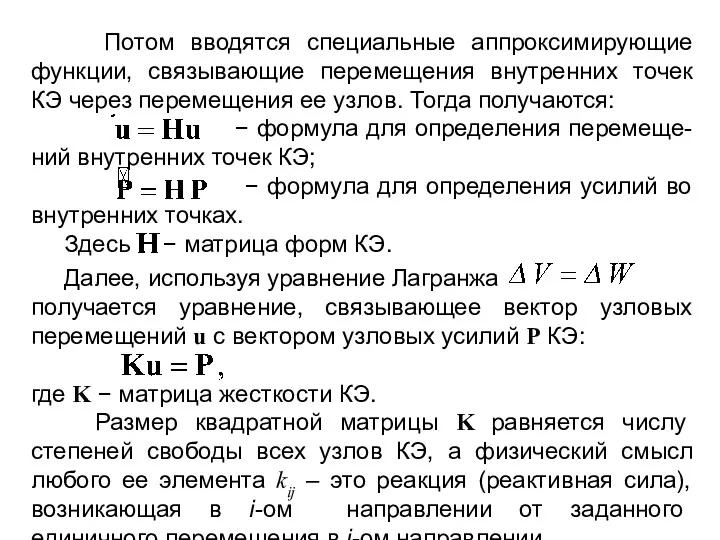
Потом вводятся специальные аппроксимирующие функции, связывающие перемещения внутренних точек КЭ
Потом вводятся специальные аппроксимирующие функции, связывающие перемещения внутренних точек КЭ
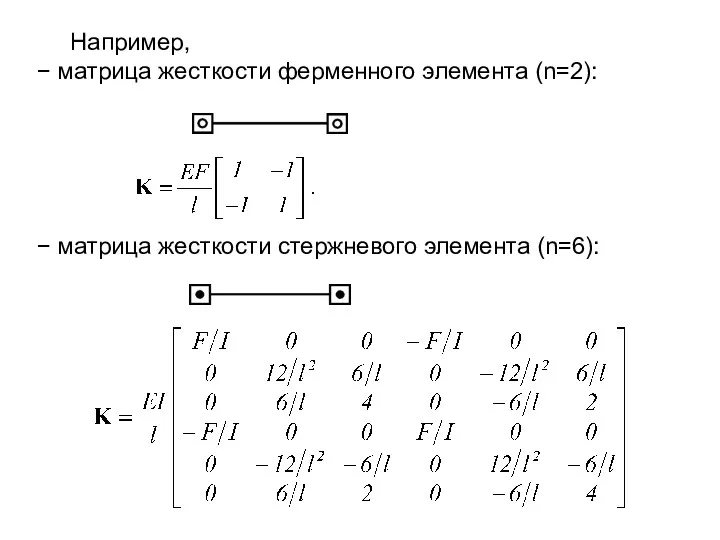
Например,
− матрица жесткости ферменного элемента (n=2):
− матрица жесткости стержневого
Например,
− матрица жесткости ферменного элемента (n=2):
− матрица жесткости стержневого
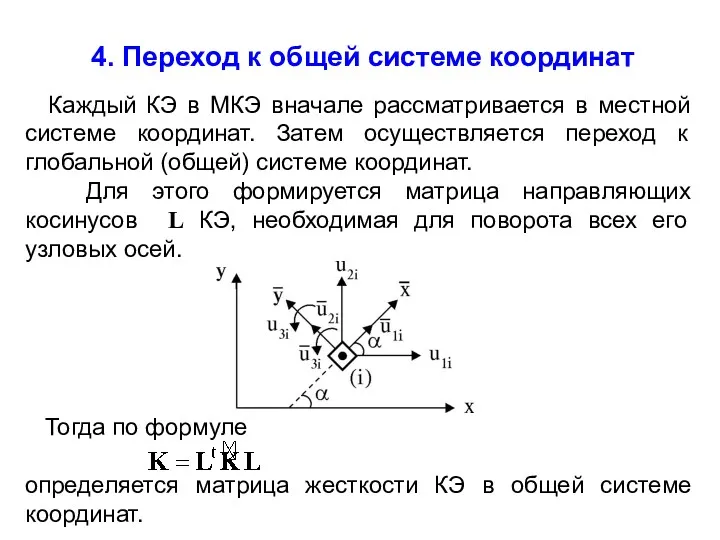
4. Переход к общей системе координат
Каждый КЭ в МКЭ вначале
4. Переход к общей системе координат
Каждый КЭ в МКЭ вначале
5. Объединение конечных элементов
Если в расчетной модели сооружения имеется m
5. Объединение конечных элементов
Если в расчетной модели сооружения имеется m
8. Учет граничных условий
Разрешающее уравнение МКЭ
K u =
8. Учет граничных условий
Разрешающее уравнение МКЭ
K u =
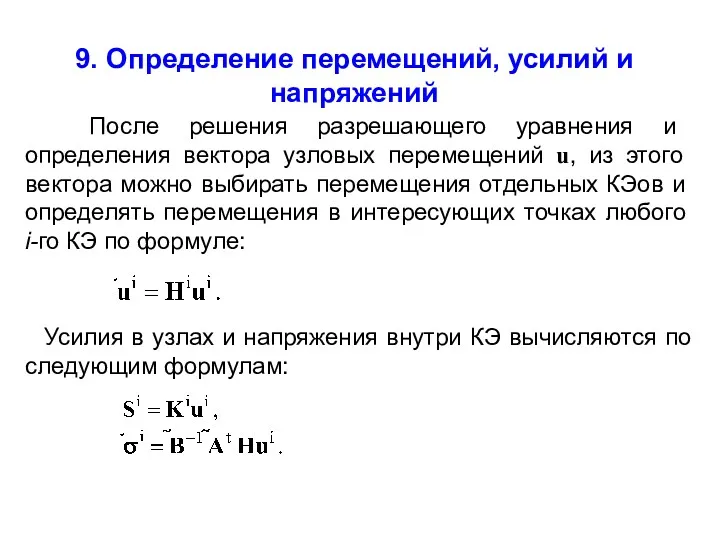
9. Определение перемещений, усилий и напряжений
После решения разрешающего уравнения и
9. Определение перемещений, усилий и напряжений
После решения разрешающего уравнения и
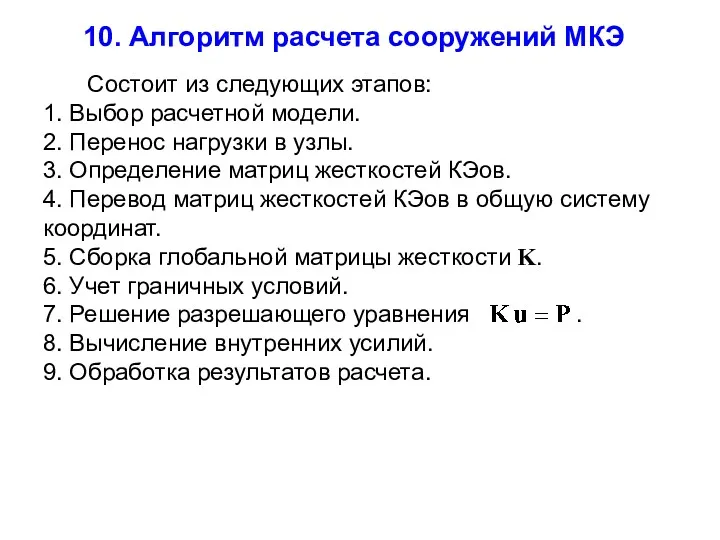
10. Алгоритм расчета сооружений МКЭ
Состоит из следующих этапов:
1. Выбор расчетной модели.
2.
10. Алгоритм расчета сооружений МКЭ
Состоит из следующих этапов:
1. Выбор расчетной модели.
2.
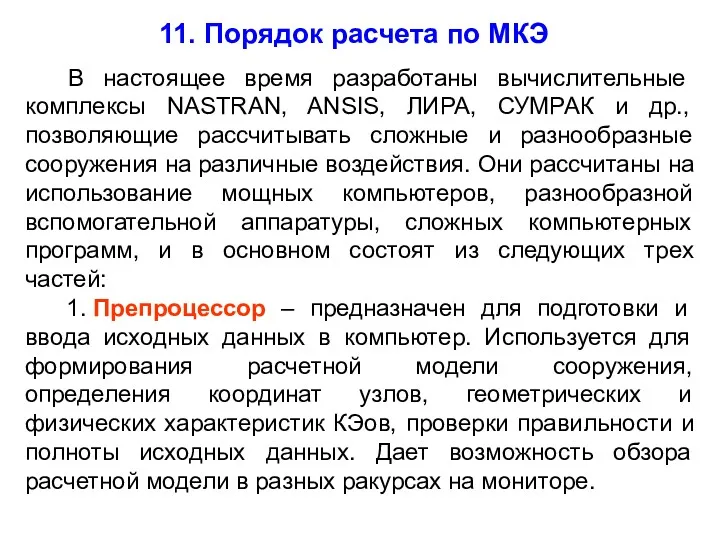
11. Порядок расчета по МКЭ
В настоящее время разработаны вычислительные комплексы
11. Порядок расчета по МКЭ
В настоящее время разработаны вычислительные комплексы
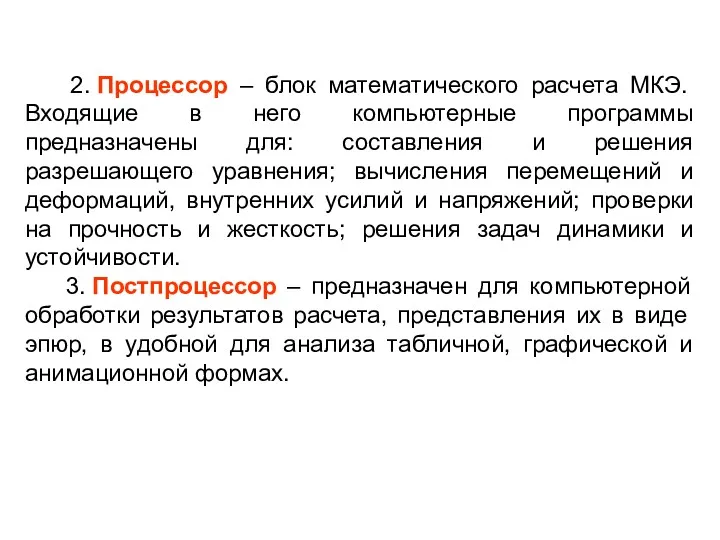
2. Процессор – блок математического расчета МКЭ. Входящие в него компьютерные
2. Процессор – блок математического расчета МКЭ. Входящие в него компьютерные
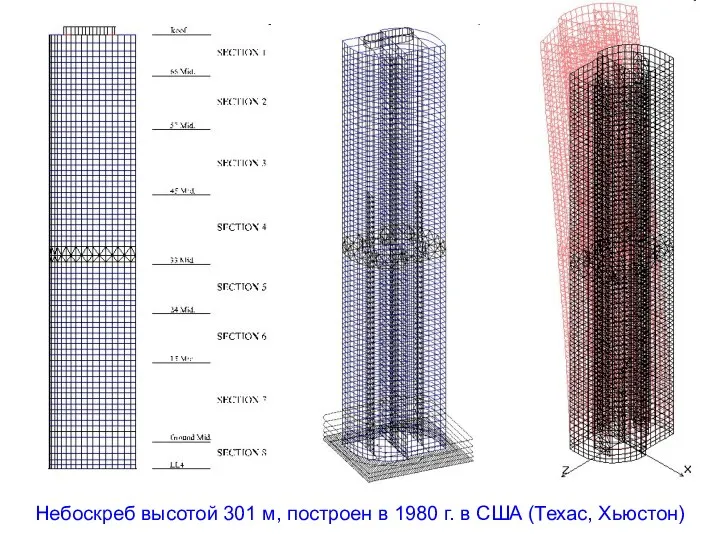
Небоскреб высотой 301 м, построен в 1980 г. в США (Техас,
Небоскреб высотой 301 м, построен в 1980 г. в США (Техас,

Мост в Южной Каролине, США
Мост в Южной Каролине, США
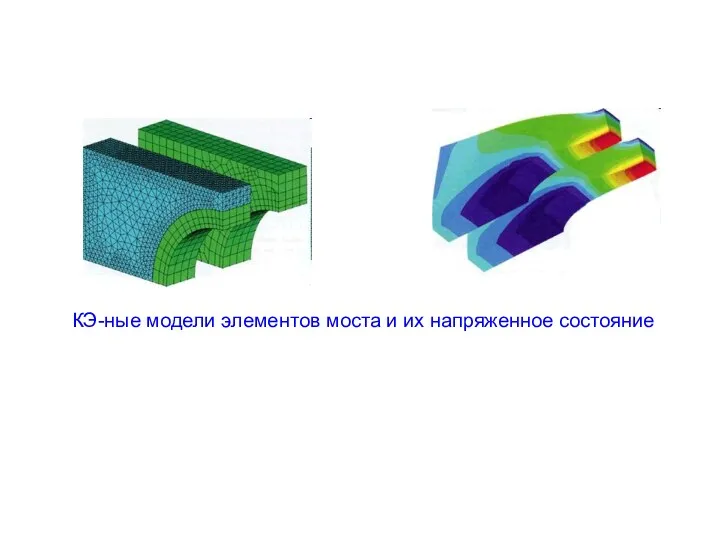
КЭ-ные модели элементов моста и их напряженное состояние
КЭ-ные модели элементов моста и их напряженное состояние
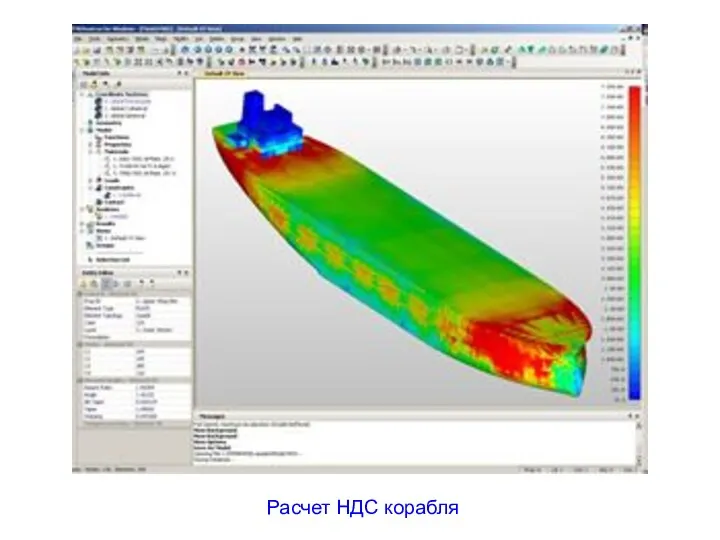
Расчет НДС корабля
Расчет НДС корабля
Вантовый мост
Вантовый мост
 Фундаментальные понятия и основополагающие принципы естествознания. Классификация элементарных частиц и их свойства
Фундаментальные понятия и основополагающие принципы естествознания. Классификация элементарных частиц и их свойства 1. Mechanika I
1. Mechanika I Механическая работа
Механическая работа Закон всемирного тяготения
Закон всемирного тяготения презентация к уроку плотность вещества
презентация к уроку плотность вещества Постоянные магниты. Магнитное поле Земли
Постоянные магниты. Магнитное поле Земли Разработка системы мероприятий по эксплуатации и техническому обслуживанию песочной системы тепловоза 2ТЭ-116
Разработка системы мероприятий по эксплуатации и техническому обслуживанию песочной системы тепловоза 2ТЭ-116 Клеевые, паяные и заклепочные соединения
Клеевые, паяные и заклепочные соединения Термодинамика. Работа и теплопередача. (Лекция 7)
Термодинамика. Работа и теплопередача. (Лекция 7) Функциональная полупроводниковая электроника. Динамические неоднородности. Домен Ганна. УФЭ (4)
Функциональная полупроводниковая электроника. Динамические неоднородности. Домен Ганна. УФЭ (4) Вечный двигатель
Вечный двигатель Получение отверстий в металлических заготовках
Получение отверстий в металлических заготовках Строение атома
Строение атома Влияние электромагнитного поля на окружающую среду и человека. 8 класс
Влияние электромагнитного поля на окружающую среду и человека. 8 класс Электромагнитные колебания. Решение задач. Подготовка к ЕГЭ
Электромагнитные колебания. Решение задач. Подготовка к ЕГЭ Physics basics (Unit 1)
Physics basics (Unit 1) Температурная зависимость электросопротивления. Термоэлектрические явления. (Лекция 6)
Температурная зависимость электросопротивления. Термоэлектрические явления. (Лекция 6) Типы волоконной оптики, способы изготовления и применения
Типы волоконной оптики, способы изготовления и применения Ультрафиолетовое излучение
Ультрафиолетовое излучение Определение плотности твердых тел и жидкостей. Лабораторная работа № 3
Определение плотности твердых тел и жидкостей. Лабораторная работа № 3 КПД простых механизмов. 7 класс
КПД простых механизмов. 7 класс Интеллектуальный марафон по физике
Интеллектуальный марафон по физике Техническое обслуживание и ремонт автомобильного транспорта
Техническое обслуживание и ремонт автомобильного транспорта Геофизические исследования скважин (ГИС). Методы каротажа
Геофизические исследования скважин (ГИС). Методы каротажа Основы расчета реакторов
Основы расчета реакторов Лазеры и их применение
Лазеры и их применение Принцип возможных перемещений (§1 - §6)
Принцип возможных перемещений (§1 - §6) Контур с током в магнитном поле
Контур с током в магнитном поле