- Расчет статически неопределимых систем методом перемещений. (Лекция 5)

Содержание
- 2. Как уже знаем, при расчете статически неопределимых систем методом сил исключаются лишние связи, а за неизвестные
- 3. 1. Неизвестные метода перемещений Определим минимальное число узловых перемещений, необходимых для определения НДС стержневой системы. Для
- 4. Из рисунков видно, что для того чтобы деформации закрепленного по концам стержня были такими же как
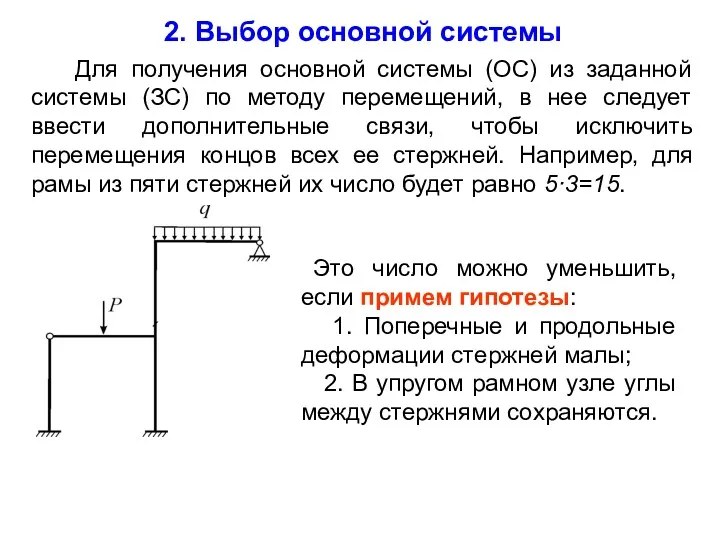
- 5. 2. Выбор основной системы Для получения основной системы (ОС) из заданной системы (ЗС) по методу перемещений,
- 6. Тогда в рассмотренной раме достаточно будет знать только три перемещения – поступательное перемещение Δ и угловые
- 7. Для определения числа неизвестных поступательных (линейных) перемещений во все узлы рамы (включая и опоры) нужно ввести
- 8. Неизвестные перемещения обозначаются Z1 , Z2 , ..., Zn . После определения числа неизвестных, в ЗС
- 9. Для получения ОС метода перемещений необходимо: – ввести в упругие узлы ЗС nу заделок; – ввести
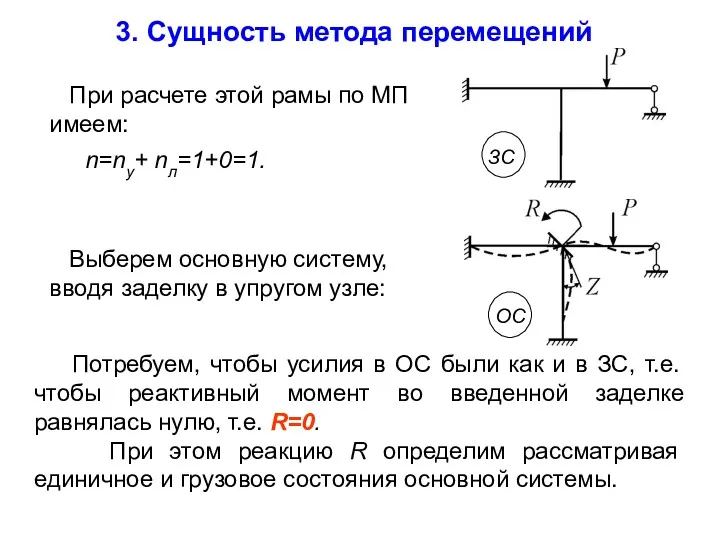
- 10. 3. Сущность метода перемещений При расчете этой рамы по МП имеем: n=nу+ nл=1+0=1. ОС Потребуем, чтобы
- 11. В единичном состоянии (ЕС) в направлении введенной связи зададим единичное перемещение Z=1 и определим возникающую реакцию
- 12. Если степень кинематической неопределимости стержневой системы равна n, ее ОС получается введением n дополнительных связей с
- 13. Все вместе они называются системой канонических уравнений метода перемещений. Здесь rii – главные коэффициенты, rij –
- 14. 4. Элементарные состояния основной системы Коэффициенты системы канонических уравнений метода перемещений – реакции, возникающие во введенных
- 15. Все эти реакции равны сумме реакций отдельных стержней, объединяемых в узлах. Для их определения необходимо рассчитывать
- 16. Стержень с равномерно распределенной нагрузкой Степень статической неопределимости системы n=1. Каноническое уравнение имеет вид . Рассмотрим
- 17. По формуле получаем окончательную эпюру изгибающих моментов: Определим коэффициенты канонического уравнения: Вычислим неизвестную реакцию: Аналогичные расчеты
- 19. 5. Определение коэффициентов канонических уравнений Коэффициенты канонических уравнений МП можно определять статическим или кинематическим способами. Статический
- 20. Теорема Релея. Реакция, возникающая в j-ой связи от перемещения i-ой связи на единицу равна реакции i-ой
- 21. Возможная работа сил j-ого единичного состояния на перемещениях i-го состояния равна Работа сил i-го состояния на
- 22. Кинематический способ применяется при сложности определения коэффициентов статическим способом или для проверки результатов статического способа. Кинематический
- 23. 6. Определение усилий После определения коэффициентов все они подставляются в систему канонических уравнений. Затем полученная система
- 25. Скачать презентацию
Как уже знаем, при расчете статически неопределимых систем методом сил
Как уже знаем, при расчете статически неопределимых систем методом сил

1. Неизвестные метода перемещений
Определим минимальное число узловых перемещений, необходимых
1. Неизвестные метода перемещений
Определим минимальное число узловых перемещений, необходимых
Из рисунков видно, что для того чтобы деформации закрепленного по
Из рисунков видно, что для того чтобы деформации закрепленного по
2. Выбор основной системы
Для получения основной системы (ОС) из заданной
2. Выбор основной системы
Для получения основной системы (ОС) из заданной
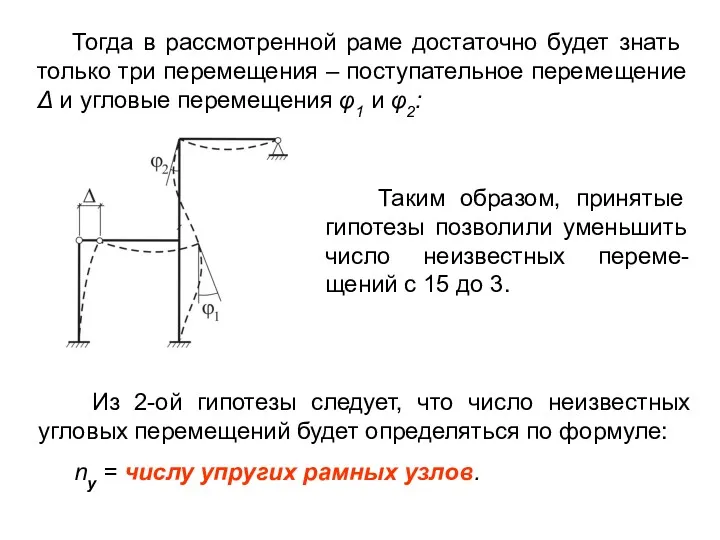
Тогда в рассмотренной раме достаточно будет знать только три перемещения
Тогда в рассмотренной раме достаточно будет знать только три перемещения
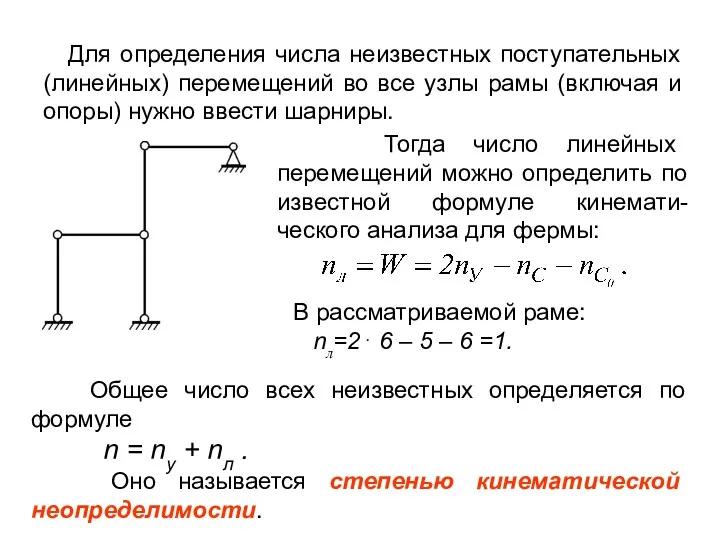
Для определения числа неизвестных поступательных (линейных) перемещений во все узлы
Для определения числа неизвестных поступательных (линейных) перемещений во все узлы
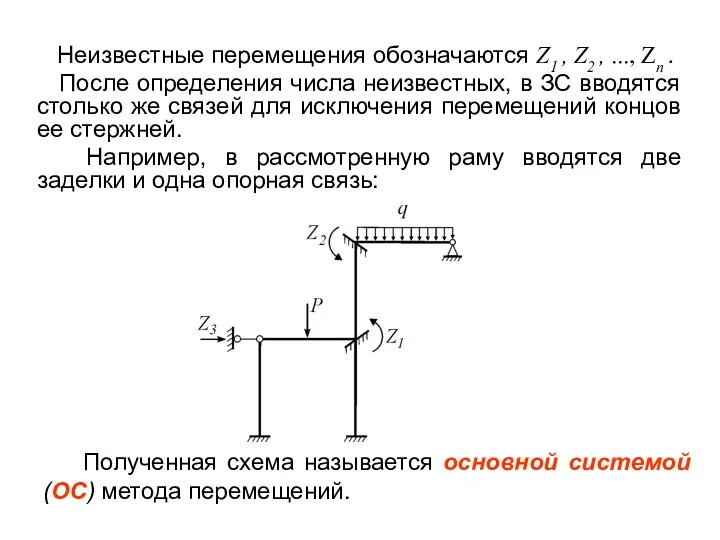
Неизвестные перемещения обозначаются Z1 , Z2 , ..., Zn .
Неизвестные перемещения обозначаются Z1 , Z2 , ..., Zn .
Для получения ОС метода перемещений необходимо:
– ввести в упругие узлы
Для получения ОС метода перемещений необходимо:
– ввести в упругие узлы
3. Сущность метода перемещений
При расчете этой рамы по МП имеем:
3. Сущность метода перемещений
При расчете этой рамы по МП имеем:
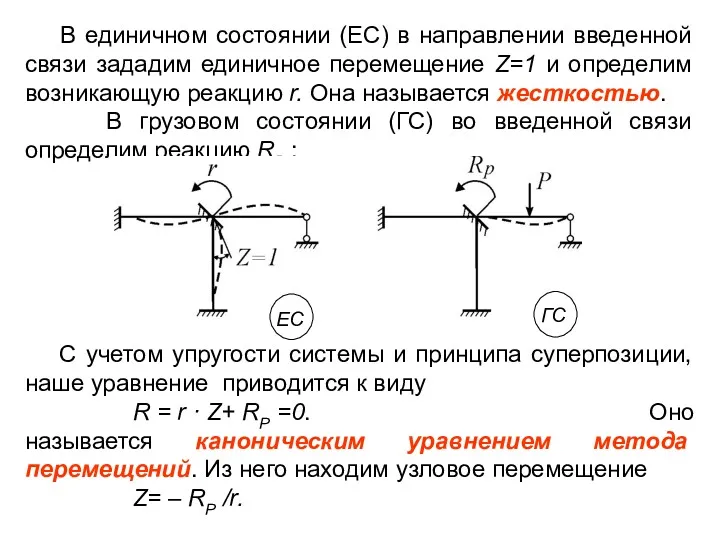
В единичном состоянии (ЕС) в направлении введенной связи зададим единичное
В единичном состоянии (ЕС) в направлении введенной связи зададим единичное
Если степень кинематической неопределимости стержневой системы равна n, ее ОС
Если степень кинематической неопределимости стержневой системы равна n, ее ОС
Все вместе они называются системой канонических уравнений метода перемещений.
Все вместе они называются системой канонических уравнений метода перемещений.
4. Элементарные состояния основной системы
Коэффициенты системы канонических уравнений метода
4. Элементарные состояния основной системы
Коэффициенты системы канонических уравнений метода
Все эти реакции равны сумме реакций отдельных стержней, объединяемых в
Все эти реакции равны сумме реакций отдельных стержней, объединяемых в
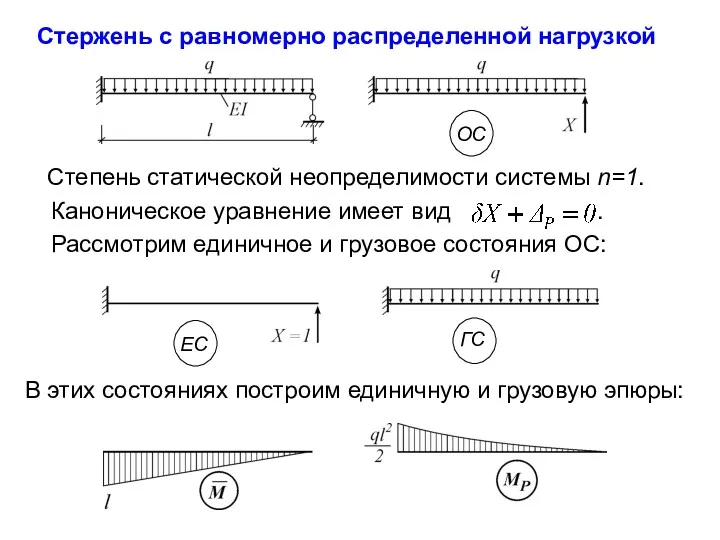
Стержень с равномерно распределенной нагрузкой
Степень статической неопределимости системы n=1.
Стержень с равномерно распределенной нагрузкой
Степень статической неопределимости системы n=1.
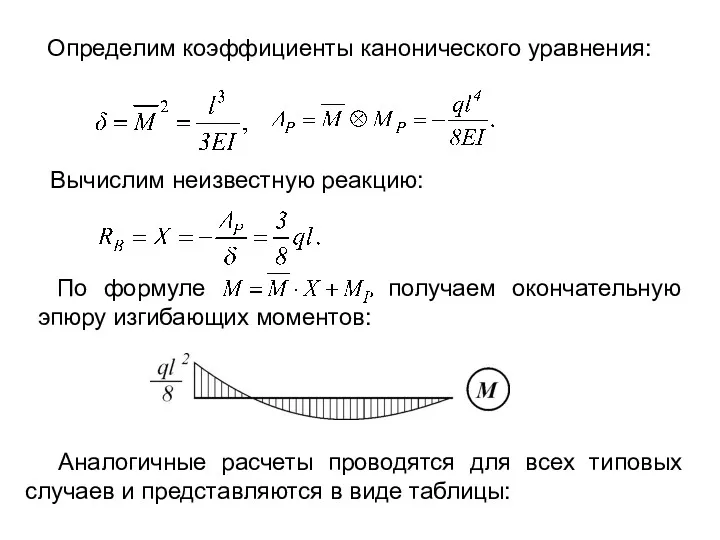
По формуле получаем окончательную эпюру изгибающих моментов:
Определим коэффициенты канонического
По формуле получаем окончательную эпюру изгибающих моментов:
Определим коэффициенты канонического

5. Определение коэффициентов канонических уравнений
Коэффициенты канонических уравнений МП можно
5. Определение коэффициентов канонических уравнений
Коэффициенты канонических уравнений МП можно
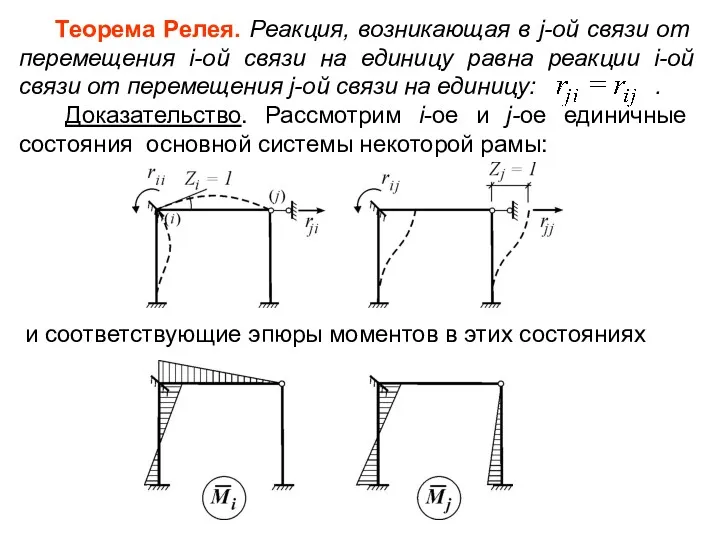
Теорема Релея. Реакция, возникающая в j-ой связи от перемещения i-ой
Теорема Релея. Реакция, возникающая в j-ой связи от перемещения i-ой
Возможная работа сил j-ого единичного состояния на перемещениях i-го состояния
Возможная работа сил j-ого единичного состояния на перемещениях i-го состояния
Кинематический способ применяется при сложности определения коэффициентов статическим способом или
Кинематический способ применяется при сложности определения коэффициентов статическим способом или
6. Определение усилий
После определения коэффициентов все они подставляются в систему
6. Определение усилий
После определения коэффициентов все они подставляются в систему
 Испарение и конденсация Урок в 8 классе
Испарение и конденсация Урок в 8 классе Фокусировка, свет. Эксплуатация вспомогательного фото-оборудования
Фокусировка, свет. Эксплуатация вспомогательного фото-оборудования внеклассное мероприятие по физике
внеклассное мероприятие по физике Кванттық механиканың математикалық аппараты
Кванттық механиканың математикалық аппараты Световые явления в живой и неживой природе
Световые явления в живой и неживой природе Технічні засоби виявлення зброї, наркотичних та вибухових речовин
Технічні засоби виявлення зброї, наркотичних та вибухових речовин Low-momentum K/π identification for τ/c factories
Low-momentum K/π identification for τ/c factories Поверхностное натяжение
Поверхностное натяжение Физика и лирика
Физика и лирика Электродинамика бөлімі бойынша оқу материалын қайталау, қорытындылау және жүйелеу
Электродинамика бөлімі бойынша оқу материалын қайталау, қорытындылау және жүйелеу Программа элективного курса История физики и развитие представлений о мире
Программа элективного курса История физики и развитие представлений о мире Тепломассообмен. Нестационарная теплопроводность
Тепломассообмен. Нестационарная теплопроводность Радиоактивность, как свидетельство сложного строения атомов. Альфа-, бета- и гамма-излучения
Радиоактивность, как свидетельство сложного строения атомов. Альфа-, бета- и гамма-излучения Ультразвук, источники ультразвука
Ультразвук, источники ультразвука Виды соединения проводников
Виды соединения проводников Влияния состава и размера зерна аустенита на температуру фазового превращения и физико-механические свойства сплавов
Влияния состава и размера зерна аустенита на температуру фазового превращения и физико-механические свойства сплавов Презентация по теме Архимедова сила
Презентация по теме Архимедова сила Электростатика
Электростатика Заземление
Заземление Газовые законы
Газовые законы Классификация энергетических ресурсов
Классификация энергетических ресурсов Силы, действующие в магнитном поле: сила Ампера, сила Лоренца
Силы, действующие в магнитном поле: сила Ампера, сила Лоренца Инфракрасное излучение
Инфракрасное излучение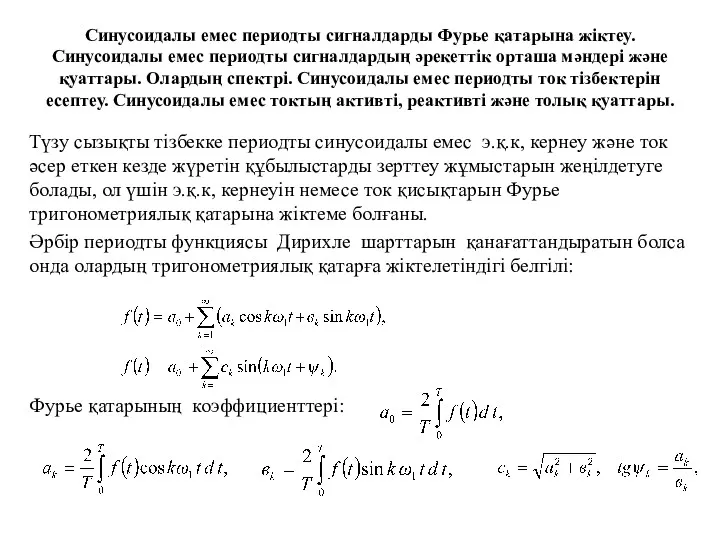 Синусоидалы емес периодты сигналдарды Фурье қатарына жіктеу. Синусоидалы емес периодты сигналдардың әрекеттік орташа мәндері
Синусоидалы емес периодты сигналдарды Фурье қатарына жіктеу. Синусоидалы емес периодты сигналдардың әрекеттік орташа мәндері Масса и размеры молекул. Количество вещества
Масса и размеры молекул. Количество вещества Диагностика неисправностей системы нейтрализации выхлопных газов двигателя 2.7CTI
Диагностика неисправностей системы нейтрализации выхлопных газов двигателя 2.7CTI Основы кристаллографии
Основы кристаллографии Закон сохранения импульса
Закон сохранения импульса