- Разработка диаграмм управления пневматическими приводами

Содержание
- 2. ПОСТРОЕНИЕ ДИАГРАММ ФУНКЦИОНИРОВАНИЯ ПНЕВМОПРИВОДОВ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
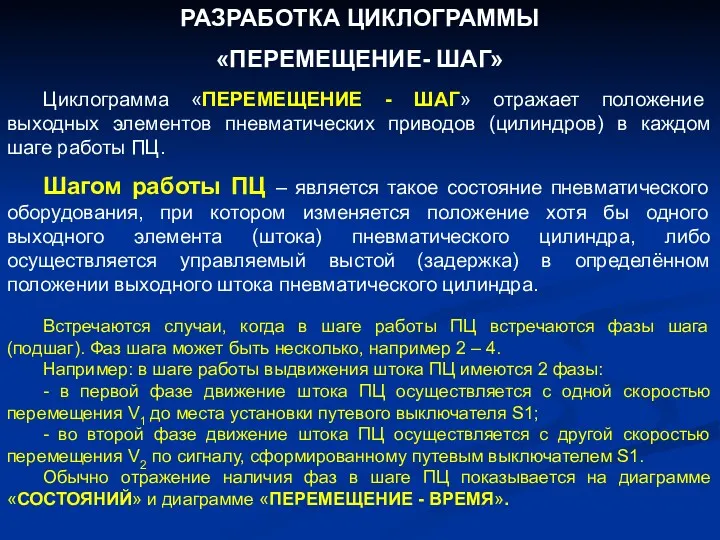
- 3. РАЗРАБОТКА ЦИКЛОГРАММЫ «ПЕРЕМЕЩЕНИЕ- ШАГ» Циклограмма «ПЕРЕМЕЩЕНИЕ - ШАГ» отражает положение выходных элементов пневматических приводов (цилиндров) в
- 4. РАЗРАБОТКА ЦИКЛОГРАММЫ «ПЕРЕМЕЩЕНИЕ - ШАГ» ПЦ1 ПЦ2 ПЦ3 1 3 2 0 5 4 8 =
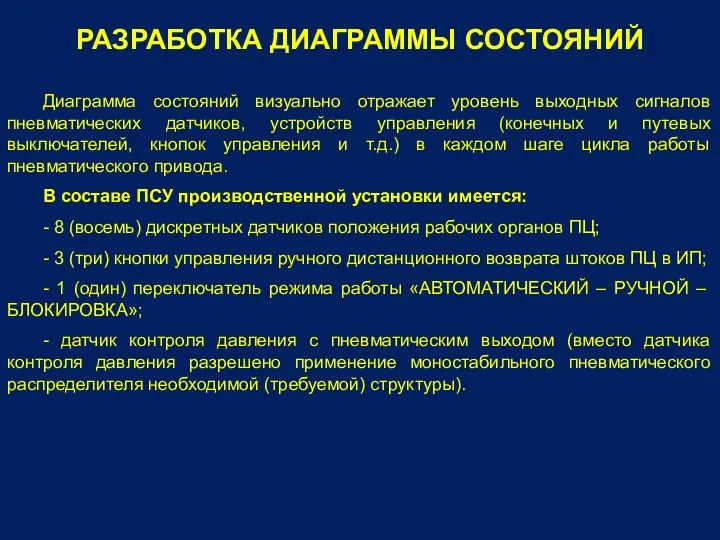
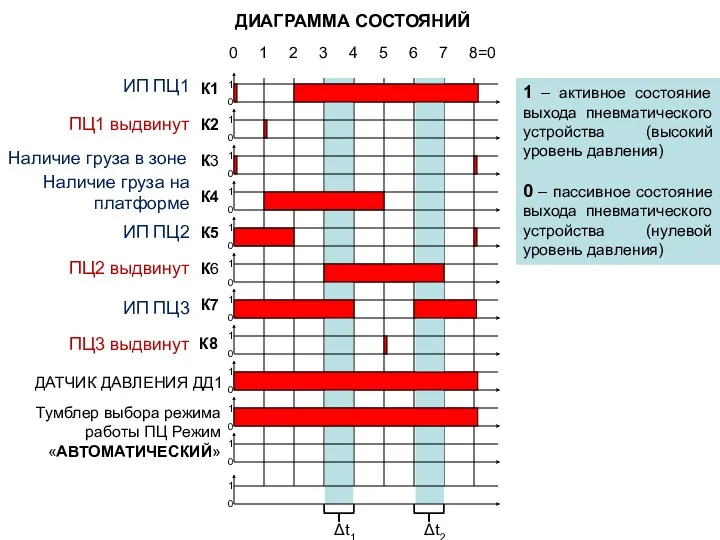
- 5. РАЗРАБОТКА ДИАГРАММЫ СОСТОЯНИЙ Диаграмма состояний визуально отражает уровень выходных сигналов пневматических датчиков, устройств управления (конечных и
- 6. ДАТЧИК ДАВЛЕНИЯ ДД1 К6 К5 К4 К3 К2 К1 8=0 7 6 5 3 4 2
- 7. РАЗРАБОТКА ДИАГРАММЫ «ПЕРЕМЕЩЕНИЕ - ВРЕМЯ» 8 7 6 5 3 4 2 1 0 t t
- 8. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЁТА И ВЫБОРА ПНЕВМАТИЧЕСКИХ ЦИЛИНДРОВ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ Длина трубопровода (воздуховода) от блока подготовки
- 9. FП1=kЗАП FВН1 FП2=kЗАП FВН2 kЗАП = 1,5...2 Расчёт требуемого усилия на штоке ПЦ – FВН1 Выбор
- 10. Определение потребляемого расхода при выдвижении и втягивании поршня ПЦ Q1 = (V1 × s1)/Lm Q2 =
- 11. ВЫБОР ПНЕВМАТИЧЕСКИХ РАСПРЕДЕЛИТЕЛЕЙ И ДРОССЕЛЕЙ При выборе типа дросселя учитывается место его установки (на цилиндре/на распределителе/или
- 12. ВЫБОР ПНЕВМАТИЧЕСКИХ КОММУНИКАЦИЙ Выбор пневматической трубки для силовой части схемы питания пневматического привода производится с учётом
- 13. Фитинг (fitting, от fit - монтировать, собирать) – элемент трубопровода, устанавливаемый для разветвления, соединения, поворотов участков
- 15. Скачать презентацию
ПОСТРОЕНИЕ
ДИАГРАММ
ФУНКЦИОНИРОВАНИЯ
ПНЕВМОПРИВОДОВ
ПРОИЗВОДСТВЕННОЙ
УСТАНОВКИ
ПОСТРОЕНИЕ
ДИАГРАММ
ФУНКЦИОНИРОВАНИЯ
ПНЕВМОПРИВОДОВ
ПРОИЗВОДСТВЕННОЙ
УСТАНОВКИ
РАЗРАБОТКА ЦИКЛОГРАММЫ
«ПЕРЕМЕЩЕНИЕ- ШАГ»
Циклограмма «ПЕРЕМЕЩЕНИЕ - ШАГ» отражает положение выходных элементов пневматических
РАЗРАБОТКА ЦИКЛОГРАММЫ
«ПЕРЕМЕЩЕНИЕ- ШАГ»
Циклограмма «ПЕРЕМЕЩЕНИЕ - ШАГ» отражает положение выходных элементов пневматических

РАЗРАБОТКА ЦИКЛОГРАММЫ «ПЕРЕМЕЩЕНИЕ - ШАГ»
ПЦ1
ПЦ2
ПЦ3
1
3
2
0
5
4
8 = 0
6
0(-)
Δt2
Δt1
7
1 – выдвинутое положение штока
РАЗРАБОТКА ЦИКЛОГРАММЫ «ПЕРЕМЕЩЕНИЕ - ШАГ»
ПЦ1
ПЦ2
ПЦ3
1
3
2
0
5
4
8 = 0
6
0(-)
Δt2
Δt1
7
1 – выдвинутое положение штока
РАЗРАБОТКА ДИАГРАММЫ СОСТОЯНИЙ
Диаграмма состояний визуально отражает уровень выходных сигналов пневматических датчиков,
РАЗРАБОТКА ДИАГРАММЫ СОСТОЯНИЙ
Диаграмма состояний визуально отражает уровень выходных сигналов пневматических датчиков,
ДАТЧИК ДАВЛЕНИЯ ДД1
К6
К5
К4
К3
К2
К1
8=0
7
6
5
3
4
2
1
0
К7
К8
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Δt1
Тумблер выбора режима работы ПЦ Режим «АВТОМАТИЧЕСКИЙ»
1
0
ДИАГРАММА СОСТОЯНИЙ
ИП ПЦ1
ПЦ1
ДАТЧИК ДАВЛЕНИЯ ДД1
К6
К5
К4
К3
К2
К1
8=0
7
6
5
3
4
2
1
0
К7
К8
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Δt1
Тумблер выбора режима работы ПЦ Режим «АВТОМАТИЧЕСКИЙ»
1
0
ДИАГРАММА СОСТОЯНИЙ
ИП ПЦ1
ПЦ1
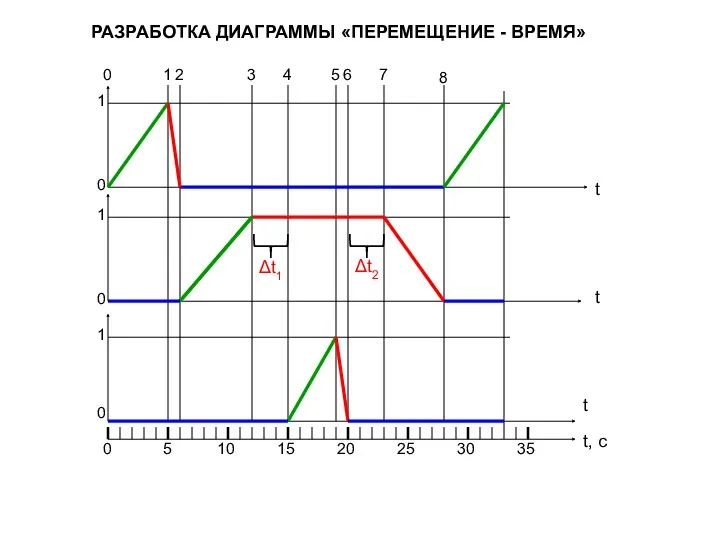
РАЗРАБОТКА ДИАГРАММЫ «ПЕРЕМЕЩЕНИЕ - ВРЕМЯ»
8
7
6
5
3
4
2
1
0
t
t
t
t, c
5
0
0
0
1
1
1
0
10
35
25
20
15
30
Δt2
Δt1
РАЗРАБОТКА ДИАГРАММЫ «ПЕРЕМЕЩЕНИЕ - ВРЕМЯ»
8
7
6
5
3
4
2
1
0
t
t
t
t, c
5
0
0
0
1
1
1
0
10
35
25
20
15
30
Δt2
Δt1
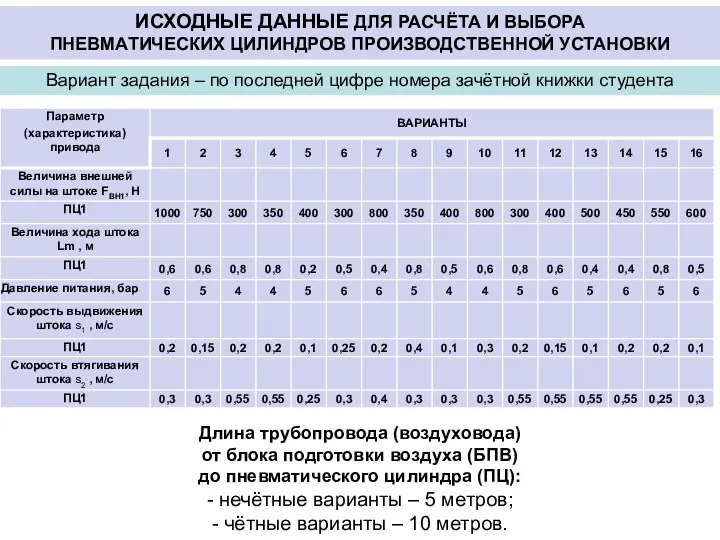
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЁТА И ВЫБОРА
ПНЕВМАТИЧЕСКИХ ЦИЛИНДРОВ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
Длина трубопровода
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЁТА И ВЫБОРА
ПНЕВМАТИЧЕСКИХ ЦИЛИНДРОВ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
Длина трубопровода
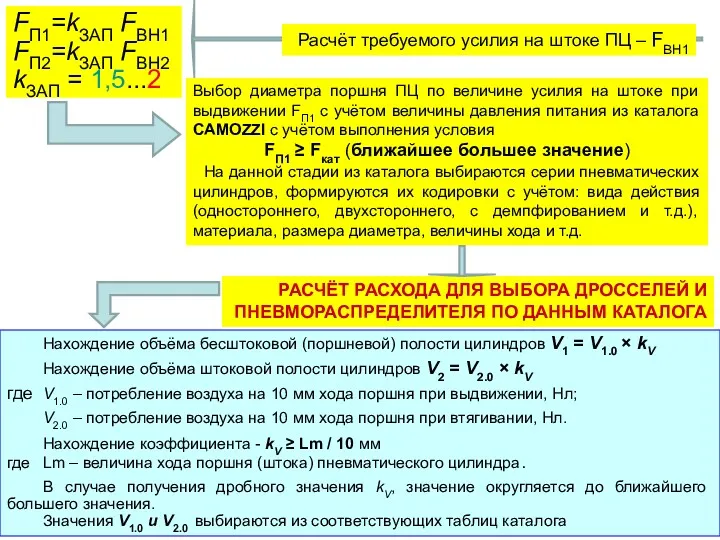
FП1=kЗАП FВН1
FП2=kЗАП FВН2
kЗАП = 1,5...2
Расчёт требуемого усилия на штоке ПЦ –
FП1=kЗАП FВН1
FП2=kЗАП FВН2
kЗАП = 1,5...2
Расчёт требуемого усилия на штоке ПЦ –
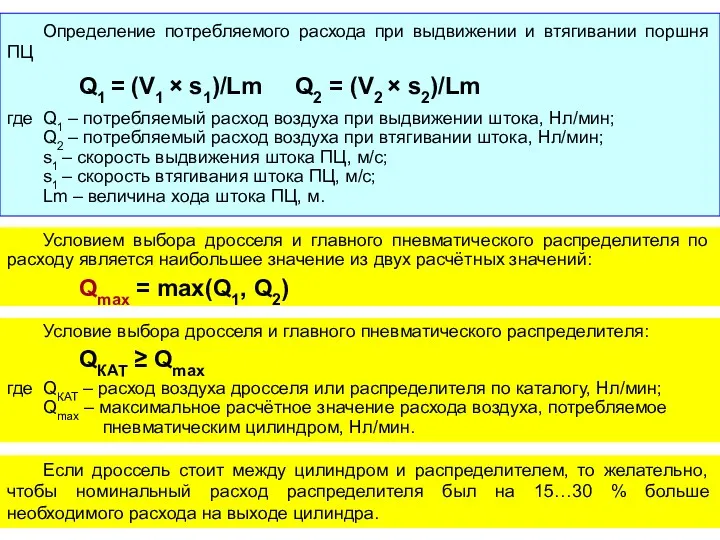
Определение потребляемого расхода при выдвижении и втягивании поршня ПЦ
Q1 = (V1
Определение потребляемого расхода при выдвижении и втягивании поршня ПЦ
Q1 = (V1
ВЫБОР ПНЕВМАТИЧЕСКИХ РАСПРЕДЕЛИТЕЛЕЙ И ДРОССЕЛЕЙ
При выборе типа дросселя учитывается место его
ВЫБОР ПНЕВМАТИЧЕСКИХ РАСПРЕДЕЛИТЕЛЕЙ И ДРОССЕЛЕЙ
При выборе типа дросселя учитывается место его
ВЫБОР ПНЕВМАТИЧЕСКИХ КОММУНИКАЦИЙ
Выбор пневматической трубки для силовой части схемы питания пневматического
ВЫБОР ПНЕВМАТИЧЕСКИХ КОММУНИКАЦИЙ
Выбор пневматической трубки для силовой части схемы питания пневматического

Фитинг (fitting, от fit - монтировать, собирать) – элемент трубопровода, устанавливаемый
Фитинг (fitting, от fit - монтировать, собирать) – элемент трубопровода, устанавливаемый
 презентация к уроку физики в 11 классе по теме: Наблюдение сплошного и линейчатого спектров излучения
презентация к уроку физики в 11 классе по теме: Наблюдение сплошного и линейчатого спектров излучения Токи в жидкостях
Токи в жидкостях Электрический ток в газах
Электрический ток в газах Решение задач по теме: Давление в жидкости
Решение задач по теме: Давление в жидкости Электрический ток в металлах
Электрический ток в металлах Электрооборудование автомобилей. Электростартеры. (Урок 4)
Электрооборудование автомобилей. Электростартеры. (Урок 4) ТО и ремонт гидросистем
ТО и ремонт гидросистем Ғылыми зерттеу әдістері
Ғылыми зерттеу әдістері Фотоэффект. Применение фотоэффекта в жизни
Фотоэффект. Применение фотоэффекта в жизни Вынужденные колебания
Вынужденные колебания Основные характеристики звезд
Основные характеристики звезд Практическая работа по физике. История лампочки
Практическая работа по физике. История лампочки Low-Band Receive Antennas
Low-Band Receive Antennas Solutii integrate de instalatii eficiente energetic. Necesarul de caldura
Solutii integrate de instalatii eficiente energetic. Necesarul de caldura Роль испарения и конденсации в природе, в жизни человека и животных
Роль испарения и конденсации в природе, в жизни человека и животных Способы вскрытия пластов. Конструкции забоя нефтяных и газовых скважин
Способы вскрытия пластов. Конструкции забоя нефтяных и газовых скважин Соединене проводников
Соединене проводников Ньютон Apple
Ньютон Apple Оптические явления в природе
Оптические явления в природе Физические величины и их измерение
Физические величины и их измерение Термодинамические свойства воды и водяного пара
Термодинамические свойства воды и водяного пара Механизмы релаксации напряженно-деформированного состояния металла деталей машин. Модели вязко-хрупкого перехода
Механизмы релаксации напряженно-деформированного состояния металла деталей машин. Модели вязко-хрупкого перехода Жалпы физика курсы, жоғарғы оқу орындарындағы физикалық білімнің іргетасы бола отырып
Жалпы физика курсы, жоғарғы оқу орындарындағы физикалық білімнің іргетасы бола отырып презентация Полупроводники. Собственная и примесная проводимость полупроводников. Электрический ток в полупроводниках
презентация Полупроводники. Собственная и примесная проводимость полупроводников. Электрический ток в полупроводниках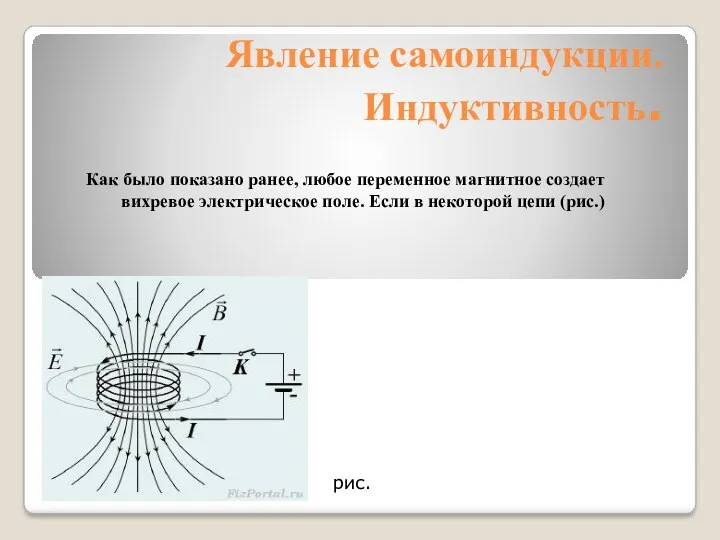 Явление самоиндукции. Индуктивность
Явление самоиндукции. Индуктивность Фізика та екологія
Фізика та екологія Применение ЯМР-спектроскопии. Лекция 5
Применение ЯМР-спектроскопии. Лекция 5 Электрические цепи переменного тока
Электрические цепи переменного тока