- Самолетовождение

Содержание
- 2. Форма Земли Геоид – линия постоянного потенциала в гравитационном поле (поверхность, перпендикулярная местной вертикали) Эллипсоид –аппроксимация
- 3. картография Картографическая проекция – отображение искривленной поверхности на плоскость Земной геоид (эллипсоид) заменяют на другую поверхность,
- 4. ИСКАЖЕНИЯ Искажаются Длины Площади Углы Формы 14.05.2019
- 5. Искажения длин Это базовое искажение, остальное можно считать следствием Возникает непостоянство масштаба плоского изображения. Масштаб различается
- 6. Эллипс искажения бесконечно малый эллипс в каждой точке на карте, являющийся изображением бесконечно малой окружности на
- 7. Вторичные искажения Искажения площадей - отклонение площади эллипса искажений от исходной площади на эллипсоиде. Искажения углов
- 8. Классификация проекций по характеру искажения Равноугольные - без искажений углов. Пример – цилиндрическая Меркатора. Свойства Масштаб
- 9. Равноугольная проекция (Меркатора) 14.05.2019
- 10. Равновеликая проекция 14.05.2019
- 11. Азимутальная проекция Азимутальные проекции —на плоскость: касательную или пересекающую . 14.05.2019
- 12. Цилиндрическая проекция На цилиндрическую поверхность различной ориентации 14.05.2019
- 13. Коническая проекция На коническую поверхность; обычно ось совпадает с осью Земли 14.05.2019
- 14. Ортодромия и локсодромия Локсодромия – линия движения с постоянным курсом Ортодромия – кратчайшая линия между двумя
- 15. Автономное определение (счисление) координат Определение координат на основе данных о векторе путевой скорости без опоры на
- 16. Счисление координат по воздушной скорости Если нет данных о векторе путевой скорости, используют курс и воздушную
- 17. Комплексные методы определения координат Современные методы определения координат предполагают использование разнородной избыточной информации (автономной и внешней,
- 18. Взаимодействие с диспетчером 2019-01-30
- 19. Два подхода к выбору заданной линии пути. Полет на маяк. Предполагает минимальное оборудование борта, ломаную траекторию
- 20. RNAV (Random Navigation, Area Navigation)) 2019-01-30
- 21. Пролет ППМ 2019-01-30
- 22. План полета Информация о предстоящем полете в строго заданной форме, передаваемая в органы ОрВД Важные аспекты
- 23. Навигационный запас топлива Дополнение к планируемому расходу топлива с учетом Возможного изменения маршрута из-за метеоусловий Возможного
- 24. FMS, ВСС Вычислительное устройство Хранение актуальной части базы данных План полета Сбор текущих данных от навигационных
- 25. Пульт FMS 2019-01-30
- 26. Навигационные базы данных Размещение и состояние аэродромов, препятствий, навигационных и посадочных средств и т.д. Актуальность базы
- 27. ARINC 424 Нормативный документ, определяющий процедуры изменения, хранения и переноса навигационной базы данных на другой носитель
- 28. Нормирование навигационных характеристик PBN- performance based navigation – нормативы обеспечения навигации, не ориентированные на конкретные методы
- 29. Достоинства PBN Позволяет оптимизировать использование воздушного пространства (выбор маршрута) Изменение структуры наземного оборудования (перемещение VOR) не
- 30. Нормативы RNAV Компоненты погрешностей PDE – Path Definition Error NSE – Navigation System Error FTE –
- 31. Классификация RNAV RNAV X – в течение 95% времени погрешность не превосходит X миль Например RNAV-4
- 32. RNP Важнейшее отличие от RNAV – бортовой мониторинг целостности. Экипаж оповещается о ситуациях, когда ANP (actual
- 33. Классификация RNP Стандартное обозначение аналогично RNAV, например RNP-4 соответствует TSE=0,3 мили Дополнительная классификация связана с использовании
- 34. Continues Descent approach 2019-01-30
- 35. Особенности текущего этапа PBN Не охватываются процедуры, где требования к характеристикам выражаются не в линейных, а
- 36. Оптимизация полета Примеры оптимизации По расходу топлива: уточняется траектория с учетом ветра, высота исходя из минимизации
- 38. Скачать презентацию
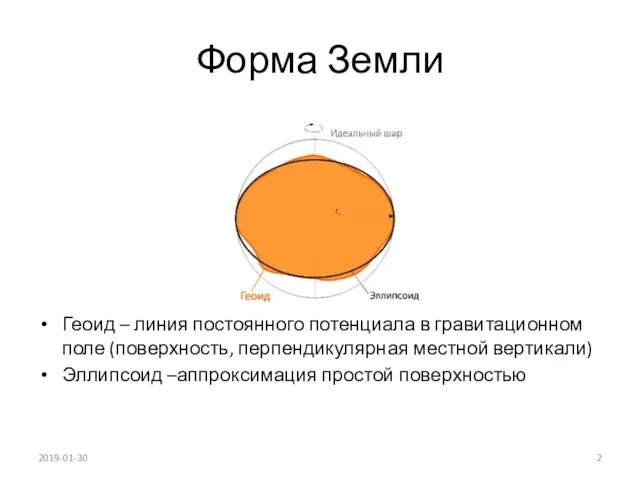
Форма Земли
Геоид – линия постоянного потенциала в гравитационном поле (поверхность, перпендикулярная
Форма Земли
Геоид – линия постоянного потенциала в гравитационном поле (поверхность, перпендикулярная
картография
Картографическая проекция – отображение искривленной поверхности на плоскость
Земной геоид (эллипсоид) заменяют
картография
Картографическая проекция – отображение искривленной поверхности на плоскость
Земной геоид (эллипсоид) заменяют
ИСКАЖЕНИЯ
Искажаются
Длины
Площади
Углы
Формы
14.05.2019
ИСКАЖЕНИЯ
Искажаются
Длины
Площади
Углы
Формы
14.05.2019
Искажения длин
Это базовое искажение, остальное можно считать следствием
Возникает непостоянство масштаба плоского
Искажения длин
Это базовое искажение, остальное можно считать следствием
Возникает непостоянство масштаба плоского
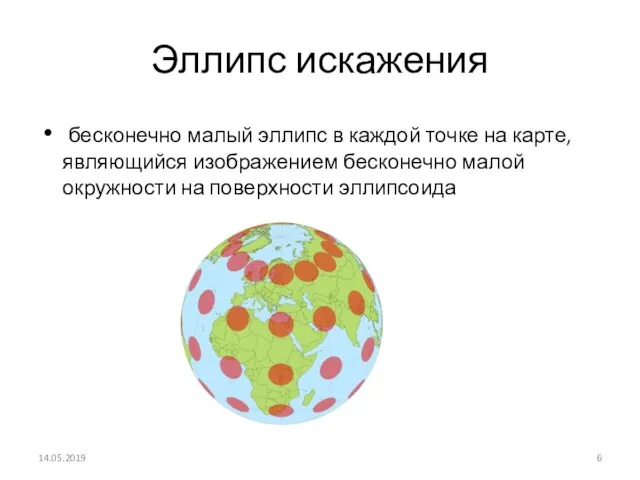
Эллипс искажения
бесконечно малый эллипс в каждой точке на карте, являющийся
Эллипс искажения
бесконечно малый эллипс в каждой точке на карте, являющийся
Вторичные искажения
Искажения площадей - отклонение площади эллипса искажений от исходной площади
Вторичные искажения
Искажения площадей - отклонение площади эллипса искажений от исходной площади
Классификация проекций по характеру искажения
Равноугольные - без искажений углов. Пример –
Классификация проекций по характеру искажения
Равноугольные - без искажений углов. Пример –

Равноугольная проекция (Меркатора)
14.05.2019
Равноугольная проекция (Меркатора)
14.05.2019

Равновеликая проекция
14.05.2019
Равновеликая проекция
14.05.2019
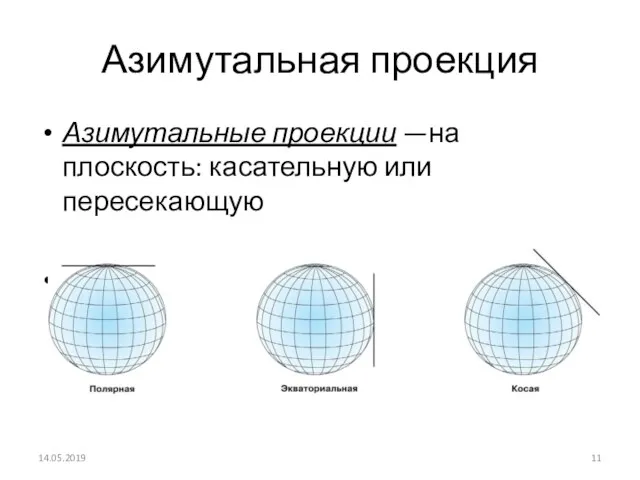
Азимутальная проекция
Азимутальные проекции —на плоскость: касательную или пересекающую
.
14.05.2019
Азимутальная проекция
Азимутальные проекции —на плоскость: касательную или пересекающую
.
14.05.2019
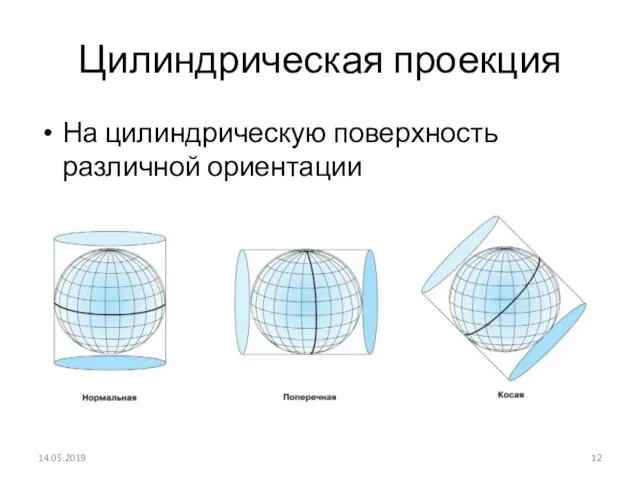
Цилиндрическая проекция
На цилиндрическую поверхность различной ориентации
14.05.2019
Цилиндрическая проекция
На цилиндрическую поверхность различной ориентации
14.05.2019
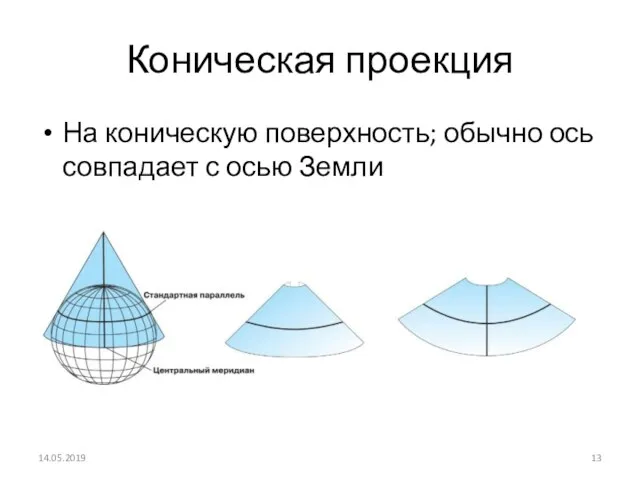
Коническая проекция
На коническую поверхность; обычно ось совпадает с осью Земли
14.05.2019
Коническая проекция
На коническую поверхность; обычно ось совпадает с осью Земли
14.05.2019
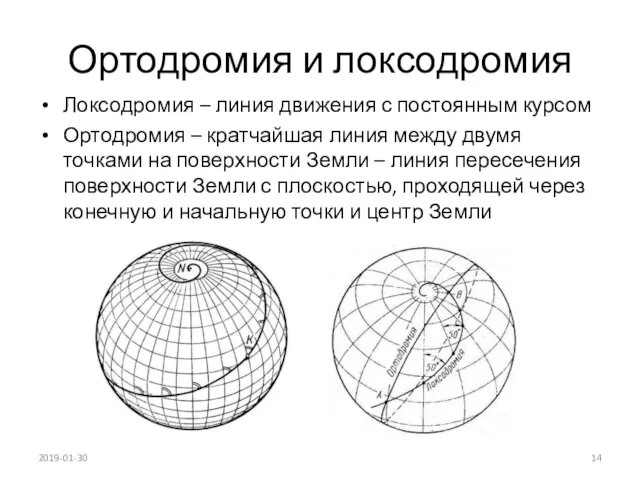
Ортодромия и локсодромия
Локсодромия – линия движения с постоянным курсом
Ортодромия – кратчайшая
Ортодромия и локсодромия
Локсодромия – линия движения с постоянным курсом
Ортодромия – кратчайшая
Автономное определение (счисление) координат
Определение координат на основе данных о векторе путевой
Автономное определение (счисление) координат
Определение координат на основе данных о векторе путевой
Счисление координат по воздушной скорости
Если нет данных о векторе путевой скорости,
Счисление координат по воздушной скорости
Если нет данных о векторе путевой скорости,
Комплексные методы определения координат
Современные методы определения координат предполагают использование разнородной избыточной
Комплексные методы определения координат
Современные методы определения координат предполагают использование разнородной избыточной
Взаимодействие с диспетчером
2019-01-30
Взаимодействие с диспетчером
2019-01-30
Два подхода к выбору заданной линии пути.
Полет на маяк. Предполагает минимальное
Два подхода к выбору заданной линии пути.
Полет на маяк. Предполагает минимальное
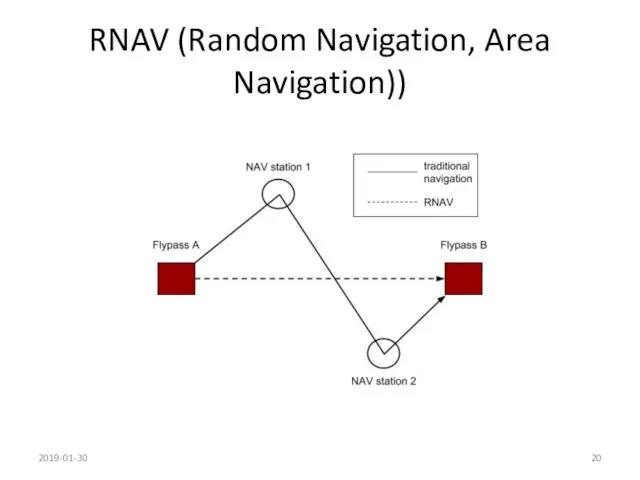
RNAV (Random Navigation, Area Navigation))
2019-01-30
RNAV (Random Navigation, Area Navigation))
2019-01-30
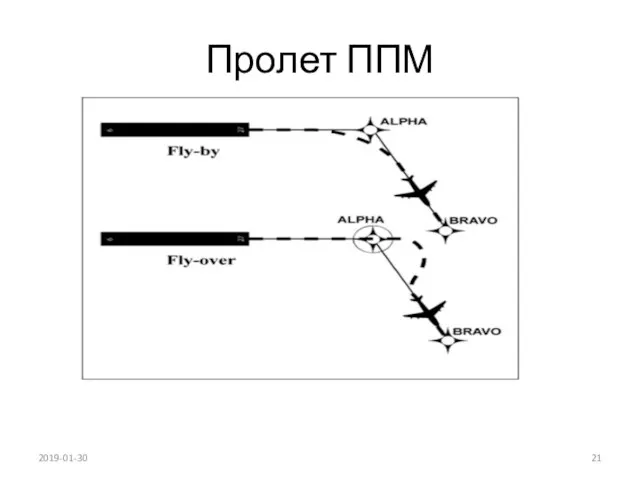
Пролет ППМ
2019-01-30
Пролет ППМ
2019-01-30
План полета
Информация о предстоящем полете в строго заданной форме, передаваемая в
План полета
Информация о предстоящем полете в строго заданной форме, передаваемая в
Навигационный запас топлива
Дополнение к планируемому расходу топлива с учетом
Возможного изменения маршрута
Навигационный запас топлива
Дополнение к планируемому расходу топлива с учетом
Возможного изменения маршрута
FMS, ВСС
Вычислительное устройство
Хранение актуальной части базы данных
План полета
Сбор текущих данных
FMS, ВСС
Вычислительное устройство
Хранение актуальной части базы данных
План полета
Сбор текущих данных

Пульт FMS
2019-01-30
Пульт FMS
2019-01-30
Навигационные базы данных
Размещение и состояние аэродромов, препятствий, навигационных и посадочных средств
Навигационные базы данных
Размещение и состояние аэродромов, препятствий, навигационных и посадочных средств
ARINC 424
Нормативный документ, определяющий процедуры изменения, хранения и переноса навигационной базы
ARINC 424
Нормативный документ, определяющий процедуры изменения, хранения и переноса навигационной базы
Нормирование навигационных характеристик
PBN- performance based navigation – нормативы обеспечения навигации, не
Нормирование навигационных характеристик
PBN- performance based navigation – нормативы обеспечения навигации, не
Достоинства PBN
Позволяет оптимизировать использование воздушного пространства (выбор маршрута)
Изменение структуры наземного оборудования
Достоинства PBN
Позволяет оптимизировать использование воздушного пространства (выбор маршрута)
Изменение структуры наземного оборудования
Нормативы RNAV
Компоненты погрешностей
PDE – Path Definition Error
NSE – Navigation System Error
FTE
Нормативы RNAV
Компоненты погрешностей
PDE – Path Definition Error
NSE – Navigation System Error
FTE
Классификация RNAV
RNAV X – в течение 95% времени погрешность не
Классификация RNAV
RNAV X – в течение 95% времени погрешность не
RNP
Важнейшее отличие от RNAV – бортовой мониторинг целостности.
Экипаж оповещается о ситуациях,
RNP
Важнейшее отличие от RNAV – бортовой мониторинг целостности.
Экипаж оповещается о ситуациях,
Классификация RNP
Стандартное обозначение аналогично RNAV, например RNP-4 соответствует TSE=0,3 мили
Дополнительная классификация
Классификация RNP
Стандартное обозначение аналогично RNAV, например RNP-4 соответствует TSE=0,3 мили
Дополнительная классификация
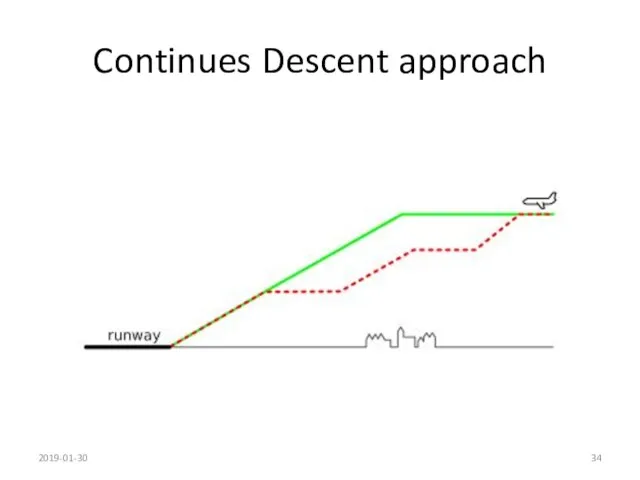
Continues Descent approach
2019-01-30
Continues Descent approach
2019-01-30

Особенности текущего этапа PBN
Не охватываются процедуры, где требования к характеристикам выражаются
Особенности текущего этапа PBN
Не охватываются процедуры, где требования к характеристикам выражаются
Оптимизация полета
Примеры оптимизации
По расходу топлива: уточняется траектория с учетом ветра, высота
Оптимизация полета
Примеры оптимизации
По расходу топлива: уточняется траектория с учетом ветра, высота
 Інтерференція та дифракція світла
Інтерференція та дифракція світла Материалы к открытому уроку по физике в 10 классе. Тема Газовые законы. Направление Подготовка к ЕГЭ
Материалы к открытому уроку по физике в 10 классе. Тема Газовые законы. Направление Подготовка к ЕГЭ Оптические приборы
Оптические приборы Лекция о работе с рациями
Лекция о работе с рациями Патриотизм считается одной из главных ценностей жизни россиян
Патриотизм считается одной из главных ценностей жизни россиян МКТ.Своя игра
МКТ.Своя игра Биологиялық жүйелер
Биологиялық жүйелер Фотонные кристаллы
Фотонные кристаллы Кинематика вращательного движения. Плоское движение. Лекция 2
Кинематика вращательного движения. Плоское движение. Лекция 2 Токи короткого замыкания в СЭЭС
Токи короткого замыкания в СЭЭС Достижения отечественных ученых и конструкторов ракетной технике при запуске искусственных спутников земли
Достижения отечественных ученых и конструкторов ракетной технике при запуске искусственных спутников земли Вероятностные методы строительной механики и теория надёжности строительных конструкций (ВМСМ и ТНСК)
Вероятностные методы строительной механики и теория надёжности строительных конструкций (ВМСМ и ТНСК) Конденсированное состояние вещества. Жидкости. (Лекция 3)
Конденсированное состояние вещества. Жидкости. (Лекция 3) Простые механизмы
Простые механизмы Геометрическая оптика
Геометрическая оптика Техническая термодинамика. Термодинамичекие потенциалы. Эффект Джоуля-Томсона. (Лекция 5)
Техническая термодинамика. Термодинамичекие потенциалы. Эффект Джоуля-Томсона. (Лекция 5) Движение под действием нескольких силАлгоритм решения задач
Движение под действием нескольких силАлгоритм решения задач Разработка системы мероприятий по эксплуатации и техническому обслуживанию песочной системы тепловоза 2ТЭ-116
Разработка системы мероприятий по эксплуатации и техническому обслуживанию песочной системы тепловоза 2ТЭ-116 Сила Лоренца и сила Ампера
Сила Лоренца и сила Ампера Электромагнит
Электромагнит Трехфазные цепи переменного тока
Трехфазные цепи переменного тока Устройство зерноуборочных комбайнов
Устройство зерноуборочных комбайнов Электродвижущая сила. Закон Ома для полной цепи
Электродвижущая сила. Закон Ома для полной цепи Электризация тел. Электростатика (8)
Электризация тел. Электростатика (8) лабораторная работа №8 Измерение мощности и работы электрического тока в лампе . 8 класс
лабораторная работа №8 Измерение мощности и работы электрического тока в лампе . 8 класс Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах Свет в нашей жизни
Свет в нашей жизни Система вентиляции кузова электровоза ВЛ11
Система вентиляции кузова электровоза ВЛ11