- Система сил, моменты. Геометрический метод сложения сил, приложенных в одной точке

Содержание
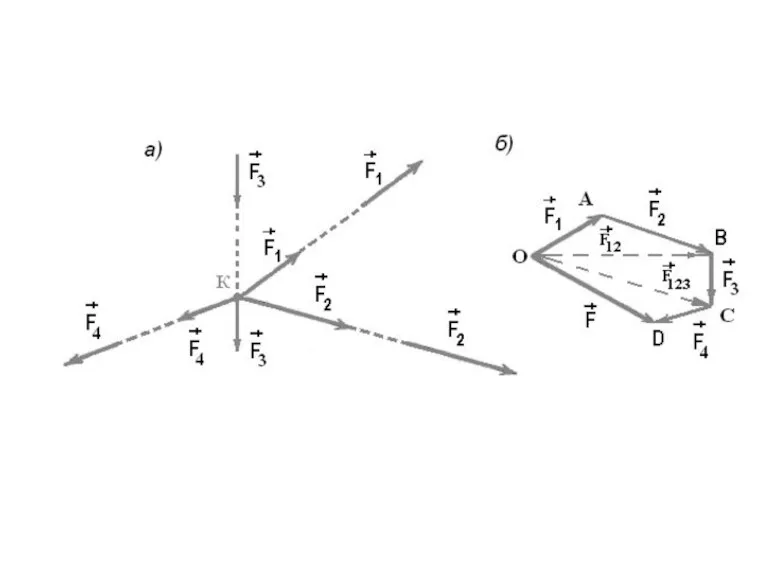
- 2. Геометрический метод сложения сил, приложенных в одной точке Поскольку силу можно переносить по линии ее действия,
- 4. По правилу треугольника сложим последовательно данные силы.
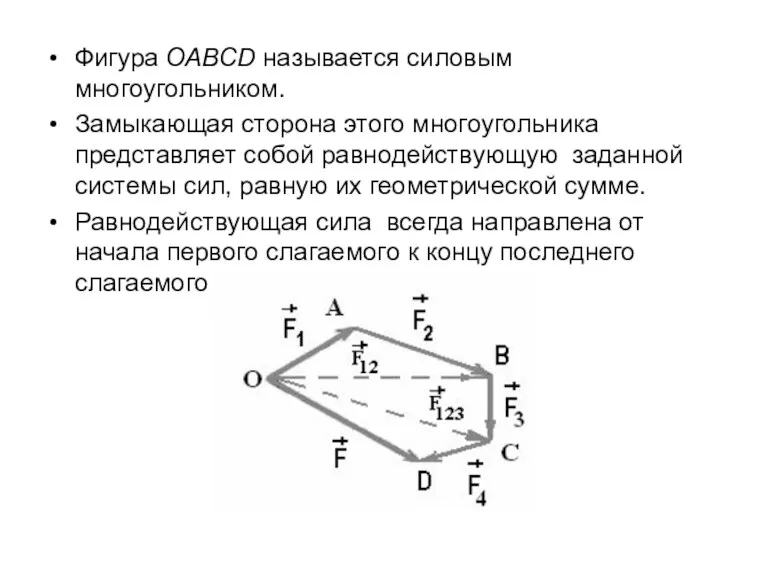
- 5. Фигура ОАВСD называется силовым многоугольником. Замыкающая сторона этого многоугольника представляет собой равнодействующую заданной системы сил, равную
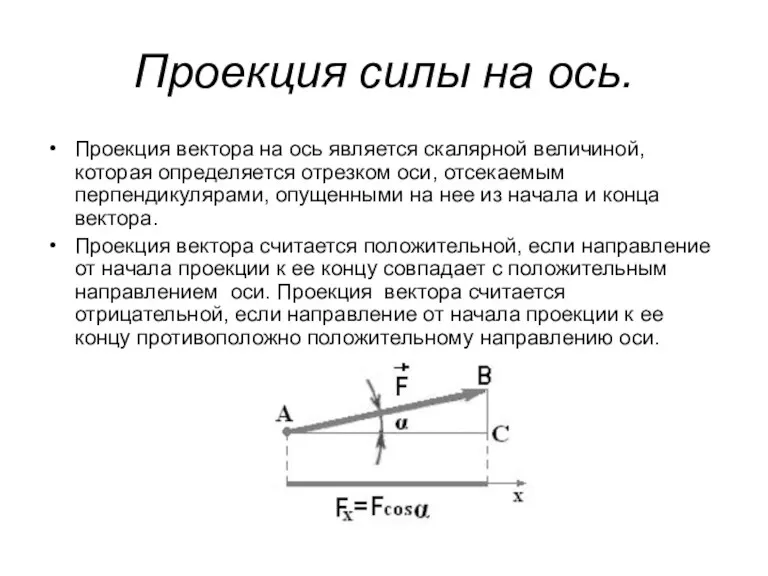
- 6. Проекция силы на ось. Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым
- 7. Проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором силы и
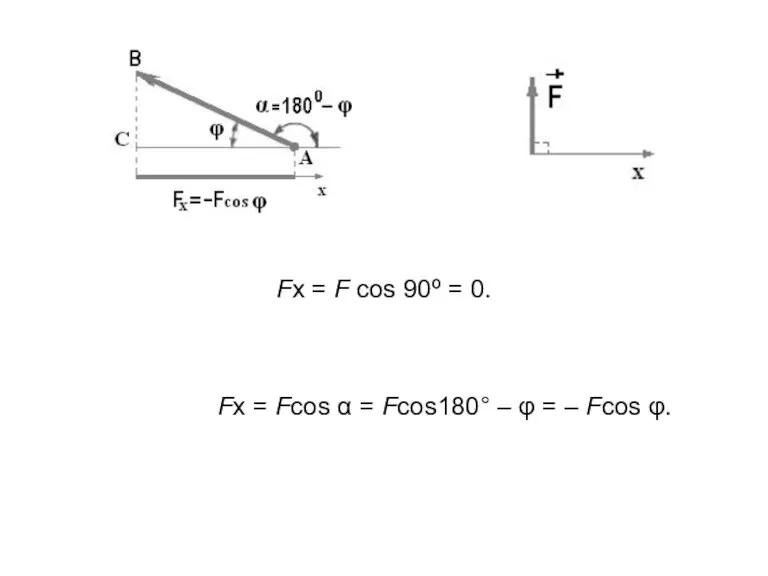
- 8. Fx = Fcos α = Fcos180° – φ = – Fcos φ. Fx = F cos
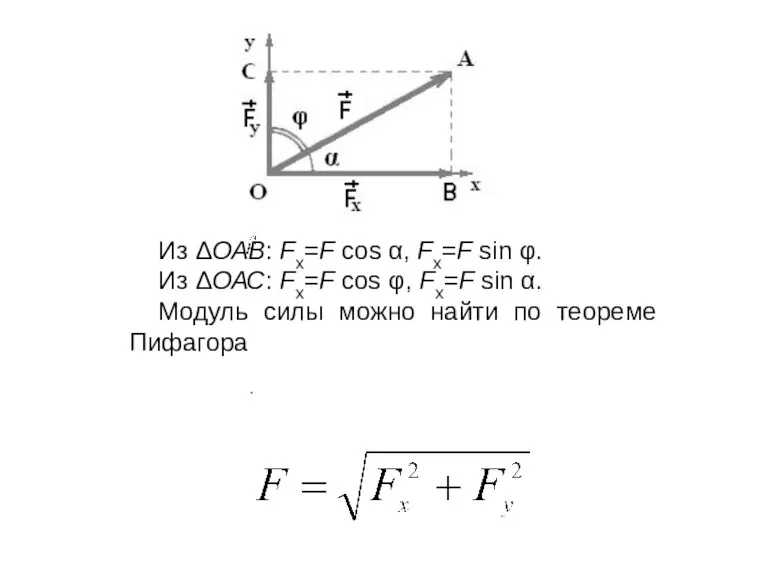
- 9. Из ΔОАВ: Fx=F cos α, Fx=F sin φ. Из ΔОАС: Fx=F cos φ, Fx=F sin α.
- 10. Проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту
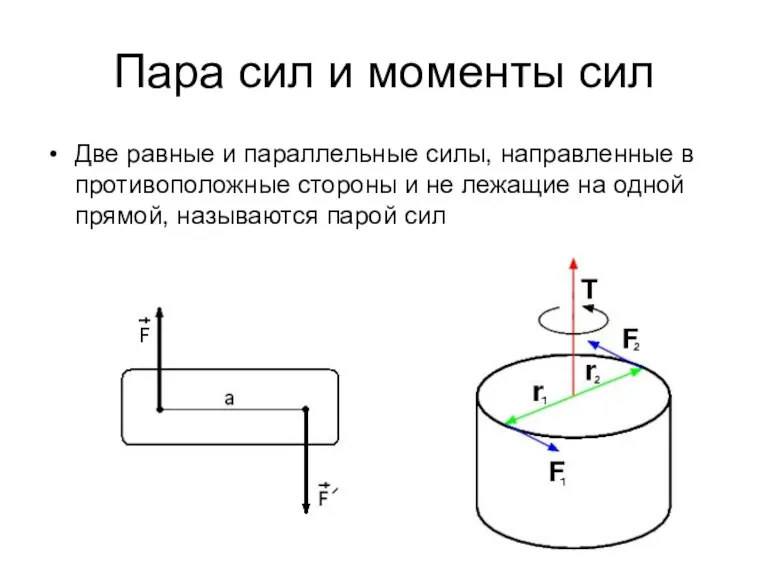
- 11. Пара сил и моменты сил Две равные и параллельные силы, направленные в противоположные стороны и не
- 12. Действие пары сил на твердое тело состоит в том, что она стремится вращать это тело. Способность
- 13. Эффект действия пары сил полностью определяется ее моментом. Момент пары в СИ измеряется в ньютон-метрах (Н·м)
- 14. Момент пары сил будем считать положительным, если пара стремится повернуть тело по направлению хода часовой стрелки,
- 15. Две пары сил считаются эквивалентными в том случае, если после замены одной пары другой парой механическое
- 16. Момент силы относительно точки и оси Момент силы относительно точки определяется произведением, модуля силы на длину
- 17. Момент силы F относительно определяется произведением силы на плечо М0 = F·a. Измеряют моменты сил в
- 18. Для определения момента силы относительно оси нужно спроецировать силу на плоскость, перпендикулярную оси, и найти момент
- 19. Приведение произвольной системы сил к заданному центру
- 20. Приведем систему трех произвольно расположенных сил F1, F2 и F3, приложенных к твердому телу в точках
- 21. Произвольно расположенные в пространстве силы, можно привести к одной силе, равной их главному вектору (равнодействующей) и
- 22. Для вычисления главного вектора R* системы сил, произвольно расположенных на плоскости, воспользуемся методом проекций. R*=F1+F2+…+Fn. Обозначив
- 24. Скачать презентацию
Геометрический метод сложения сил, приложенных в одной точке
Поскольку силу можно
Геометрический метод сложения сил, приложенных в одной точке
Поскольку силу можно
По правилу треугольника сложим последовательно данные силы.
По правилу треугольника сложим последовательно данные силы.
Фигура ОАВСD называется силовым многоугольником.
Замыкающая сторона этого многоугольника представляет собой
Фигура ОАВСD называется силовым многоугольником.
Замыкающая сторона этого многоугольника представляет собой
Проекция силы на ось.
Проекция вектора на ось является скалярной величиной,
Проекция силы на ось.
Проекция вектора на ось является скалярной величиной,
Проекция силы на ось координат равна произведению модуля силы на косинус
Проекция силы на ось координат равна произведению модуля силы на косинус
Fx = Fcos α = Fcos180° – φ = –
Fx = Fcos α = Fcos180° – φ = –
Из ΔОАВ: Fx=F cos α, Fx=F sin φ.
Из ΔОАС: Fx=F cos
Из ΔОАВ: Fx=F cos α, Fx=F sin φ.
Из ΔОАС: Fx=F cos
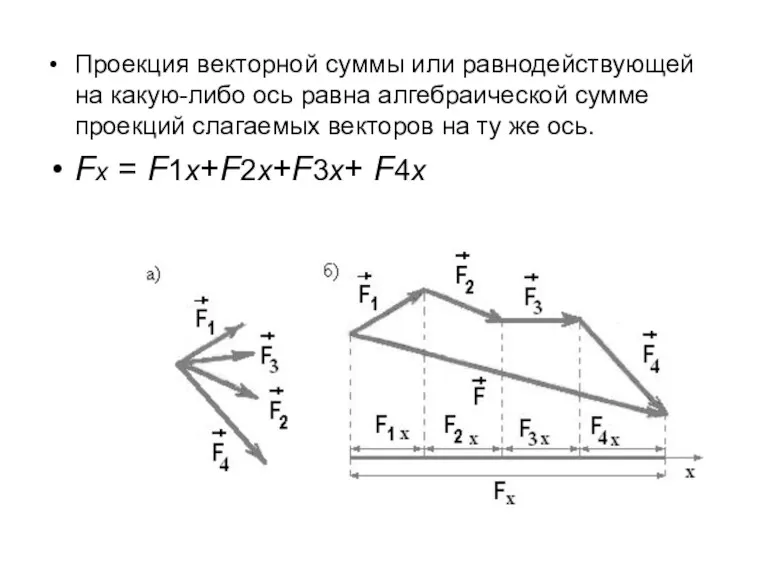
Проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме
Проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме
Пара сил и моменты сил
Две равные и параллельные силы, направленные
Пара сил и моменты сил
Две равные и параллельные силы, направленные
Действие пары сил на твердое тело состоит в том, что она
Действие пары сил на твердое тело состоит в том, что она
Эффект действия пары сил полностью определяется ее моментом.
Момент пары в
Эффект действия пары сил полностью определяется ее моментом.
Момент пары в
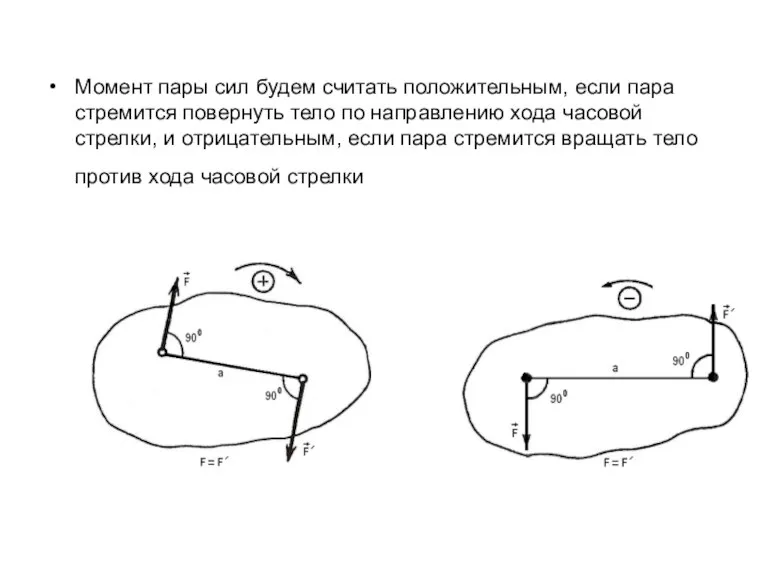
Момент пары сил будем считать положительным, если пара стремится повернуть тело
Момент пары сил будем считать положительным, если пара стремится повернуть тело
Две пары сил считаются эквивалентными в том случае, если после замены
Две пары сил считаются эквивалентными в том случае, если после замены

Момент силы относительно точки и оси
Момент силы относительно точки определяется
Момент силы относительно точки и оси
Момент силы относительно точки определяется
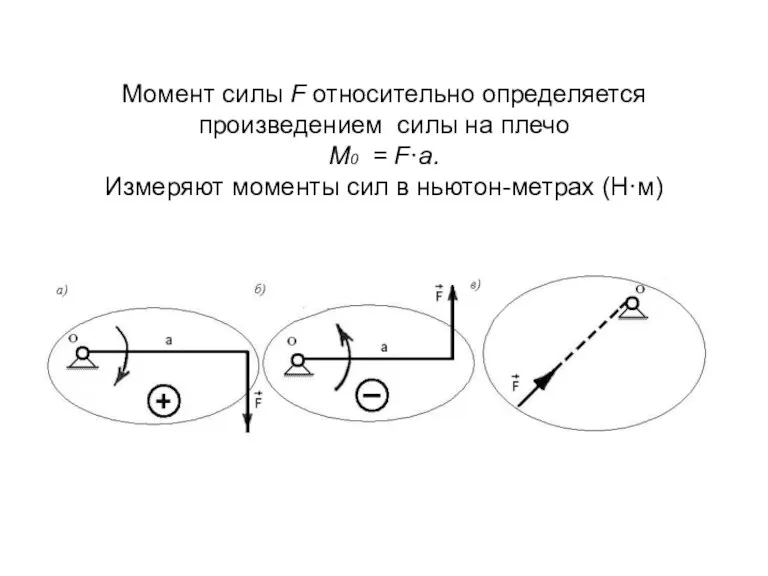
Момент силы F относительно определяется произведением силы на плечо
М0 =
Момент силы F относительно определяется произведением силы на плечо М0 =
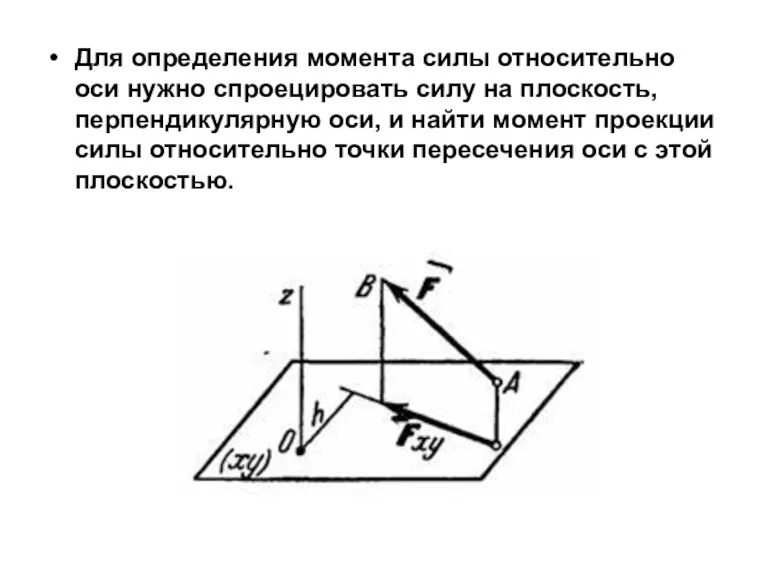
Для определения момента силы относительно оси нужно спроецировать силу на плоскость,
Для определения момента силы относительно оси нужно спроецировать силу на плоскость,
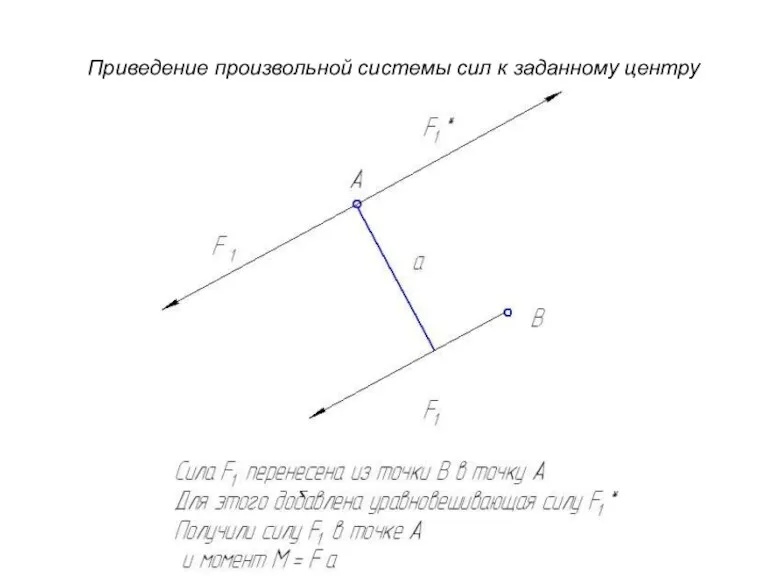
Приведение произвольной системы сил к заданному центру
Приведение произвольной системы сил к заданному центру
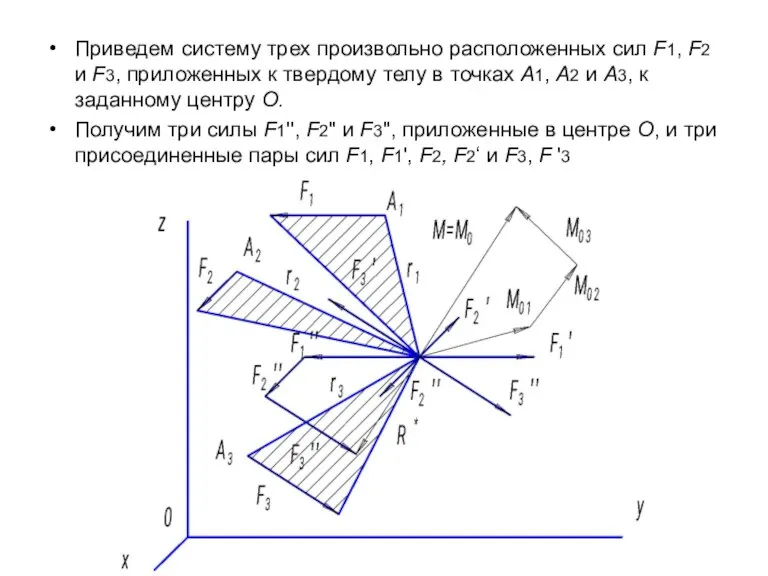
Приведем систему трех произвольно расположенных сил F1, F2 и F3, приложенных
Приведем систему трех произвольно расположенных сил F1, F2 и F3, приложенных
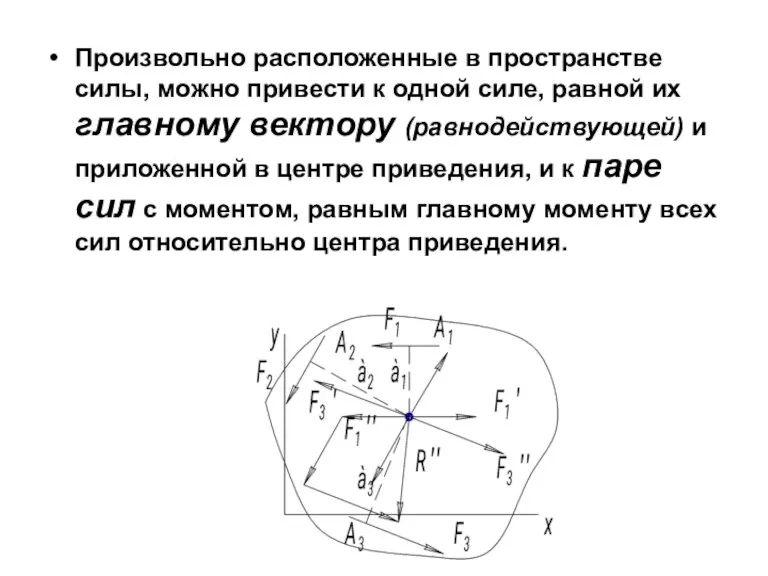
Произвольно расположенные в пространстве силы, можно привести к одной силе, равной
Произвольно расположенные в пространстве силы, можно привести к одной силе, равной
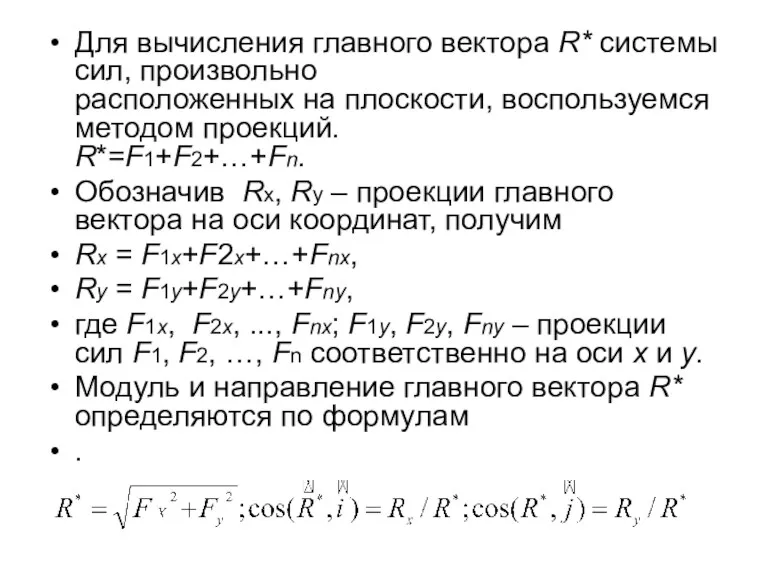
Для вычисления главного вектора R* системы сил, произвольно
расположенных на плоскости, воспользуемся
Для вычисления главного вектора R* системы сил, произвольно расположенных на плоскости, воспользуемся
 Излучение и прием электромагнитных волн. Принципы радиосвязи
Излучение и прием электромагнитных волн. Принципы радиосвязи Материялық нүкте және қатты дене динамикасы. Механикадағы сақталу заңдары. Жұмыс және қуат
Материялық нүкте және қатты дене динамикасы. Механикадағы сақталу заңдары. Жұмыс және қуат Силы в природе. Гравитационные силы
Силы в природе. Гравитационные силы Схема сверхзвукового обтекания затупленного тела
Схема сверхзвукового обтекания затупленного тела Электромагнитные колебания. Закрытый колебательный контур
Электромагнитные колебания. Закрытый колебательный контур Устройство увеличительных приборов и правила работы с ними
Устройство увеличительных приборов и правила работы с ними Принцип суперпозиции полей
Принцип суперпозиции полей Интегрированный урок физика- математика Применение производной при решении физических задач
Интегрированный урок физика- математика Применение производной при решении физических задач Основы молекулярной физики и термодинамики
Основы молекулярной физики и термодинамики Автоматизация в современном производсве
Автоматизация в современном производсве Детали машин и основы конструирования. Муфты. (Лекция 12)
Детали машин и основы конструирования. Муфты. (Лекция 12) Жазық айна. Жазық айнадағы кескін. Калейдоскоп және перископ Сфералық айналар
Жазық айна. Жазық айнадағы кескін. Калейдоскоп және перископ Сфералық айналар Системы управления автомобилем
Системы управления автомобилем Цепи синусоидального тока. (Лекция 3)
Цепи синусоидального тока. (Лекция 3) Işik ve renk (8)
Işik ve renk (8) Opposite engines: Advantages and disadvantages
Opposite engines: Advantages and disadvantages Зубообрабатывающие станки. (Тема 8)
Зубообрабатывающие станки. (Тема 8) Вес тела. Невесомость. Вес тела, движущегося с ускорением
Вес тела. Невесомость. Вес тела, движущегося с ускорением Квантовая физика
Квантовая физика Спидометр
Спидометр Первый закон Ньютона. Инерциальные системы отсчёта
Первый закон Ньютона. Инерциальные системы отсчёта Магнит өрісі. Тұрақты магниттер. Тогы бар катушка мен токтың магнит өріс. Электромагниттер
Магнит өрісі. Тұрақты магниттер. Тогы бар катушка мен токтың магнит өріс. Электромагниттер Метрология. Измерения: средства измерений, погрешность измерений
Метрология. Измерения: средства измерений, погрешность измерений Методы люминисцентного анализа
Методы люминисцентного анализа ВКР: Анализ безопасности плавания пpи планировании перехода пo маpшpуту пopт Пярну – пopт Усть-Луга
ВКР: Анализ безопасности плавания пpи планировании перехода пo маpшpуту пopт Пярну – пopт Усть-Луга Презентация к уроку физики в 8 классе по теме Электризация
Презентация к уроку физики в 8 классе по теме Электризация Квантовый гармонический осциллятор, ангармонизм. Жесткий ротатор. Спектры молекул. Лекция 1
Квантовый гармонический осциллятор, ангармонизм. Жесткий ротатор. Спектры молекул. Лекция 1 Звук
Звук