- Сложение и разложение сил. Равновесие сходящейся системы сил

Содержание
- 2. Модуль R, углы β и γ находят по формулам Тема 5. Сложение и разложение сил. а)
- 3. 4) 1,9 Н Силы Р = 1н , Q =1н приложены в одной точке, угол между
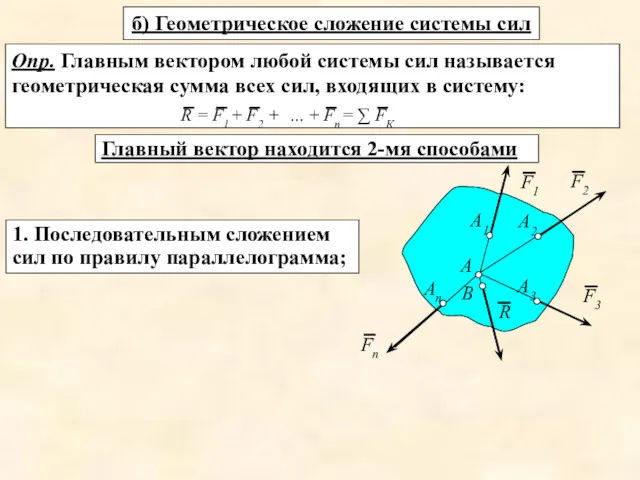
- 4. б) Геометрическое сложение системы сил Опр. Главным вектором любой системы сил называется геометрическая сумма всех сил,
- 5. 2. Построением многоугольника сил. Каждая сила переносится параллельно самой себе. Последующая сила откладывается от конца предыдущей.
- 6. Построим параллелограмм, у которого разлагаемая сила является диагональю, а стороны || заданным направлениям. 5.3. Разложение силы
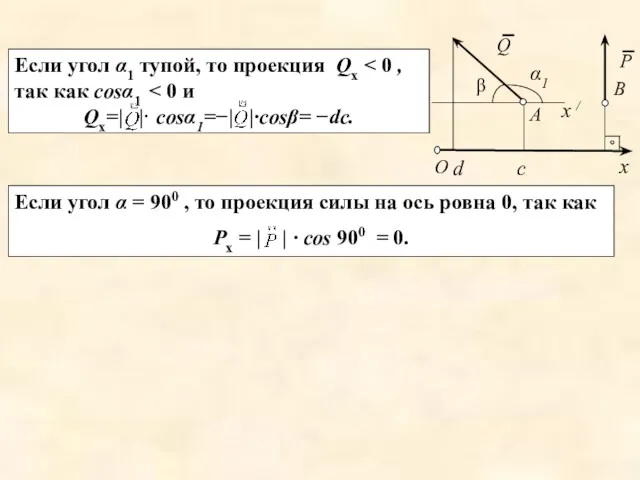
- 7. а) Проекция силы на ось 5.4. Аналитический способ задания и сложения сил Если угол α острый,
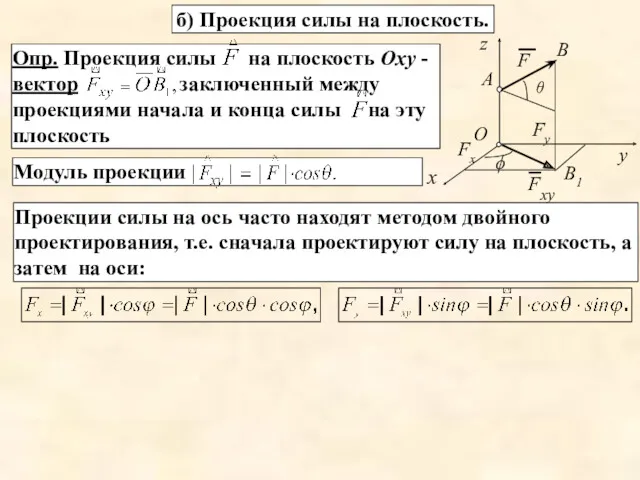
- 9. б) Проекция силы на плоскость. Fх Fу Проекции силы на ось часто находят методом двойного проектирования,
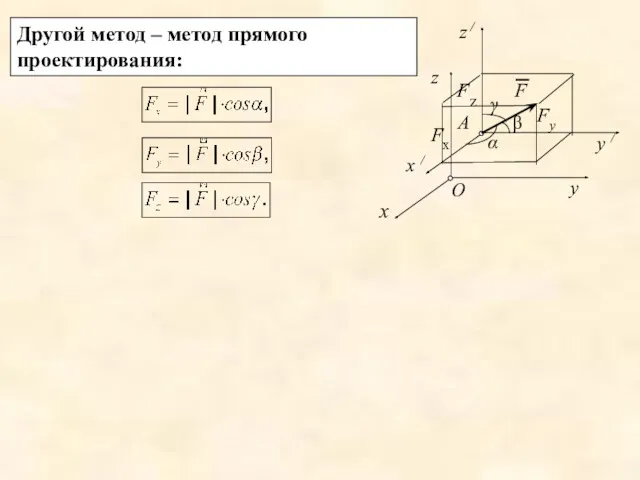
- 10. Fz Fx Fу Другой метод – метод прямого проектирования:
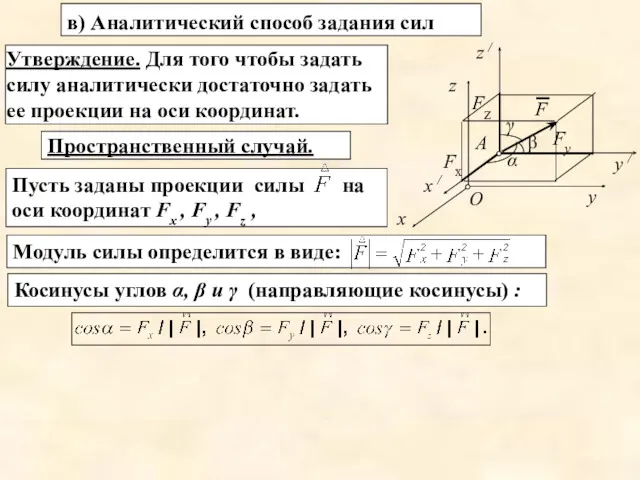
- 11. Косинусы углов α, β и γ (направляющие косинусы) : в) Аналитический способ задания сил Утверждение. Для
- 12. Модуль силы и угол α найдем из формул х у Аналитический способ сложения сил Плоский случай.
- 13. Сложение пространственной системы сил
- 14. ЗАДАНИЕ № 16 ВАРИАНТЫ ОТВЕТОВ: 1) – 1 Н 2) 0 Н 3) -0,5 Н Угол,
- 15. Сложение плоской системы сил
- 16. Тема 6. Равновесие сходящейся системы сил Вывод. Для равновесия сходящейся системы сил, приложенной к твердому телу,
- 17. 6.1. Геометрические условия равновесия Вывод. Для равновесия сходящейся системы сил необходимо и достаточно, чтобы силовой многоугольник,
- 18. 6.2. Аналитические условия равновесия Случай пространственной сходящейся системы сил Аналитически модуль главного вектора системы сил определяется
- 19. Rx = ∑ Fкх = 0, Rу = ∑ Fку = 0, (*) Rz = ∑
- 20. Случай плоской сходящейся системы сил Равенства (**) выражают условия равновесия в аналитической форме плоской сходящейся системы
- 21. А 6.3. Решение задач на равновесие сходящейся системы сил Алгоритм решения задач на равновесие 1. Выбор
- 22. 5. Определение искомых величин. 4. Составление уравнений равновесия для системы сил, приложенной к свободному твердому телу.
- 23. Пример Выберем объектом равновесия груз и изобразим действующие на него силы.
- 24. а) Геометрический способ Треугольник сил должен быть замкнут (теорема о трех силах). α Из треугольника: N
- 25. Составим таблицу проекций сил на оси. α Px Pу Fx Fу Уравнения (**) имеют вид: ∑
- 26. Теорема о трех силах Теорема. Если твердое тело находится в равновесии под действием трех непараллельных сил,
- 27. Пример на применение теоремы о трех силах Брус АВ весом Р, закреплен в точке А неподвижным
- 29. Скачать презентацию
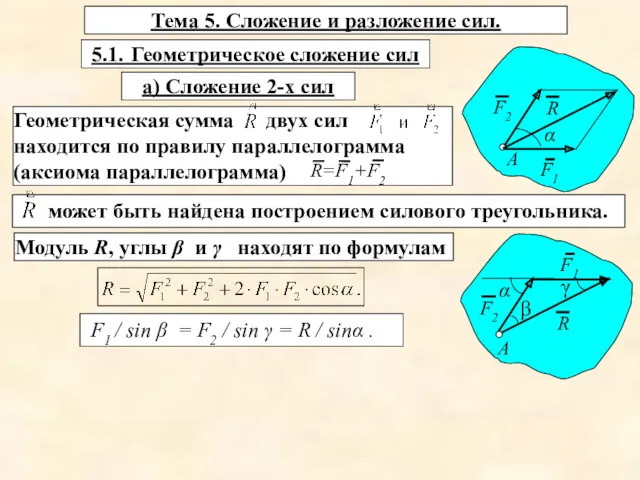
Модуль R, углы β и γ находят по формулам
Тема 5. Сложение
Модуль R, углы β и γ находят по формулам
Тема 5. Сложение
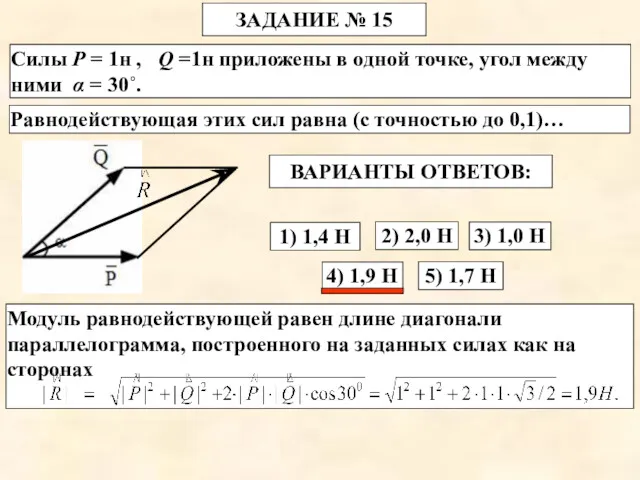
4) 1,9 Н
Силы Р = 1н , Q =1н приложены
4) 1,9 Н
Силы Р = 1н , Q =1н приложены
б) Геометрическое сложение системы сил
Опр. Главным вектором любой системы сил
б) Геометрическое сложение системы сил
Опр. Главным вектором любой системы сил
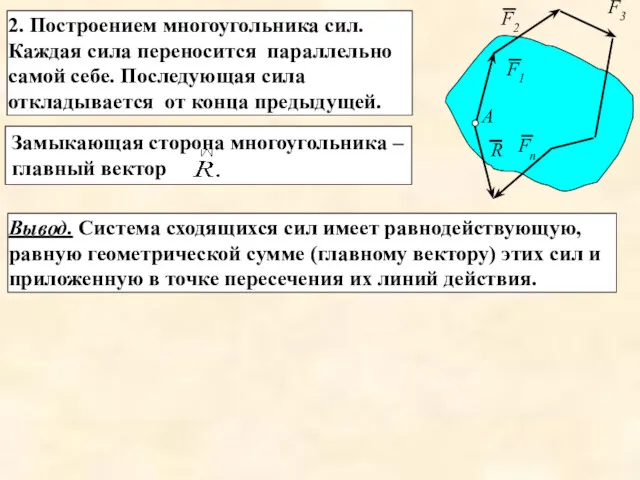
2. Построением многоугольника сил. Каждая сила переносится параллельно самой себе. Последующая
2. Построением многоугольника сил. Каждая сила переносится параллельно самой себе. Последующая
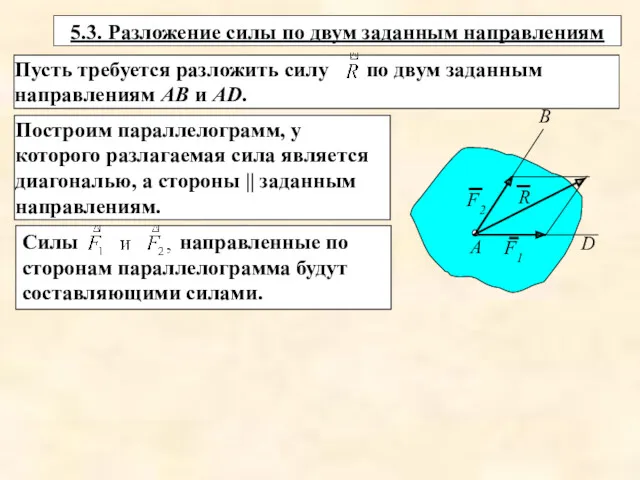
Построим параллелограмм, у которого разлагаемая сила является диагональю, а стороны ||
Построим параллелограмм, у которого разлагаемая сила является диагональю, а стороны ||
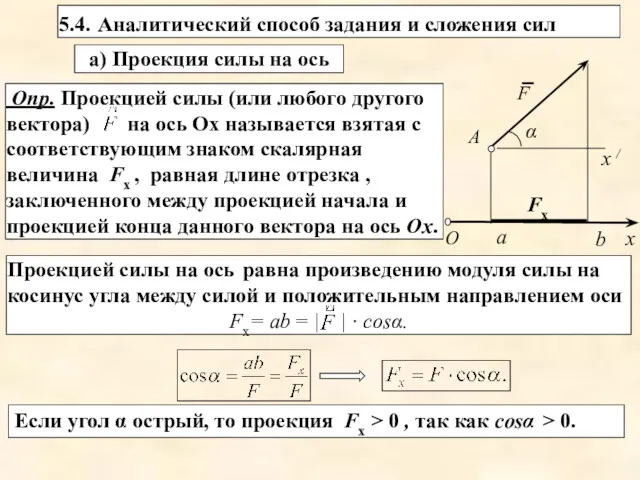
а) Проекция силы на ось
5.4. Аналитический способ задания и сложения
а) Проекция силы на ось
5.4. Аналитический способ задания и сложения
б) Проекция силы на плоскость.
Fх
Fу
Проекции силы на ось часто находят
б) Проекция силы на плоскость.
Fх
Fу
Проекции силы на ось часто находят
Fz
Fx
Fу
Другой метод – метод прямого проектирования:
Fz
Fx
Fу
Другой метод – метод прямого проектирования:
Косинусы углов α, β и γ (направляющие косинусы) :
в) Аналитический способ
Косинусы углов α, β и γ (направляющие косинусы) :
в) Аналитический способ
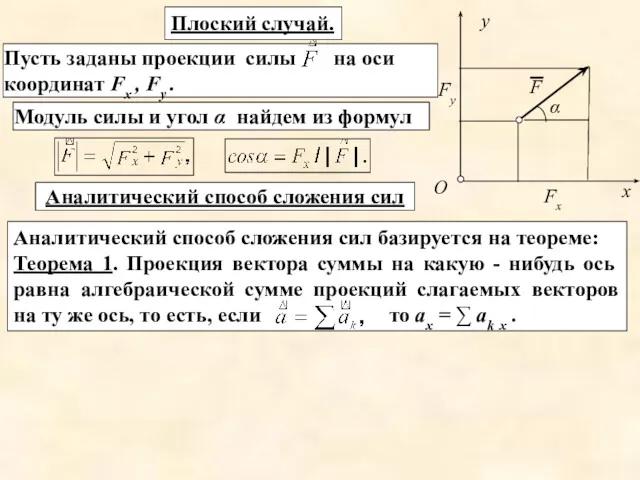
Модуль силы и угол α найдем из формул
х
у
Аналитический способ сложения сил
Плоский
Модуль силы и угол α найдем из формул
х
у
Аналитический способ сложения сил
Плоский
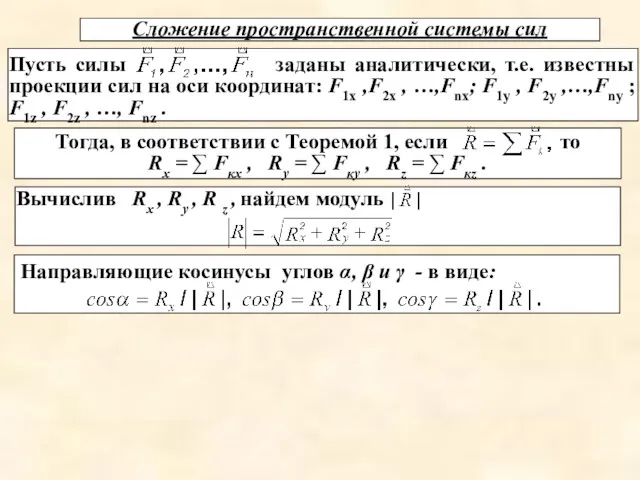
Сложение пространственной системы сил
Сложение пространственной системы сил
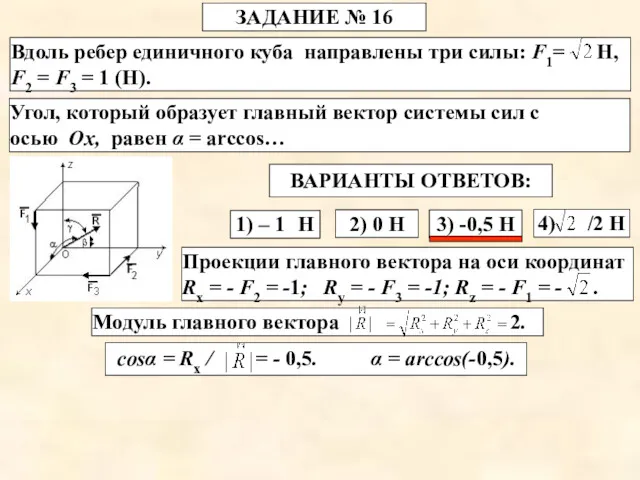
ЗАДАНИЕ № 16
ВАРИАНТЫ ОТВЕТОВ:
1) – 1 Н
2) 0 Н
3)
ЗАДАНИЕ № 16
ВАРИАНТЫ ОТВЕТОВ:
1) – 1 Н
2) 0 Н
3)
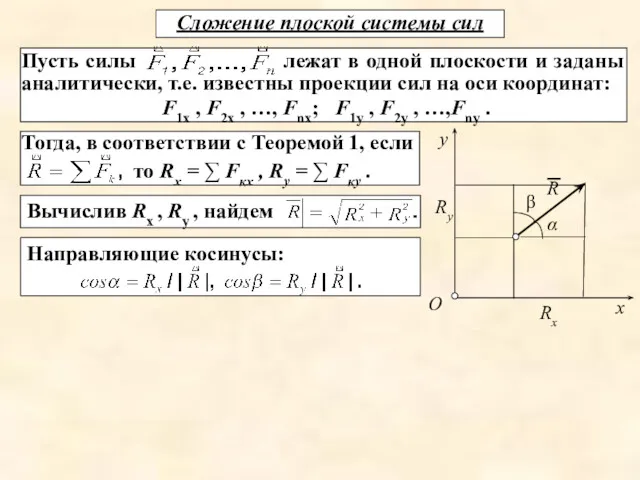
Сложение плоской системы сил
Сложение плоской системы сил
Тема 6. Равновесие сходящейся системы сил
Вывод. Для равновесия сходящейся системы
Тема 6. Равновесие сходящейся системы сил
Вывод. Для равновесия сходящейся системы
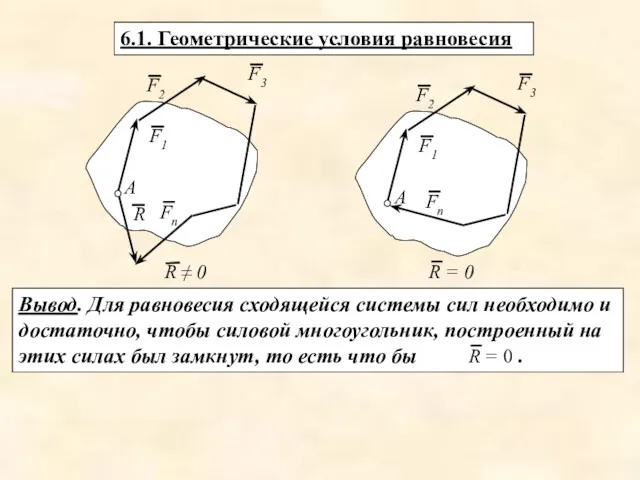
6.1. Геометрические условия равновесия
Вывод. Для равновесия сходящейся системы сил необходимо и
6.1. Геометрические условия равновесия
Вывод. Для равновесия сходящейся системы сил необходимо и
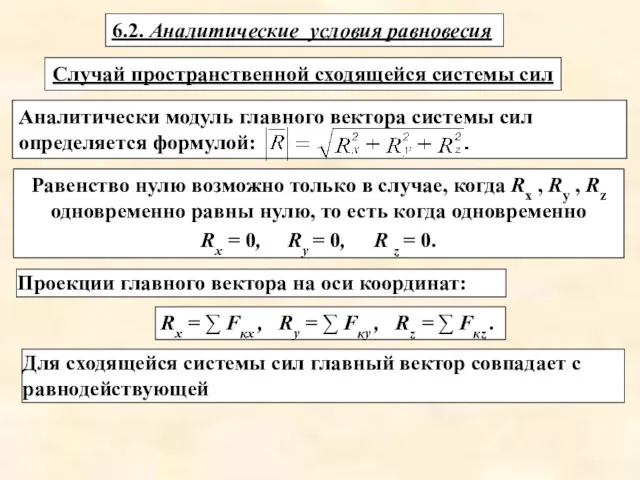
6.2. Аналитические условия равновесия
Случай пространственной сходящейся системы сил
Аналитически модуль главного вектора
6.2. Аналитические условия равновесия
Случай пространственной сходящейся системы сил
Аналитически модуль главного вектора
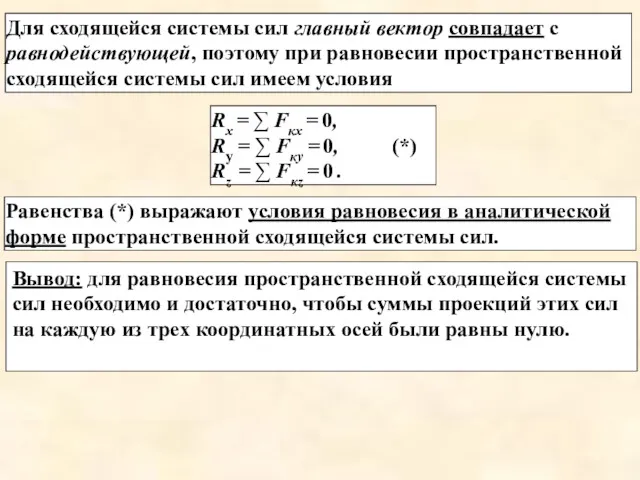
Rx = ∑ Fкх = 0,
Rу = ∑ Fку =
Rx = ∑ Fкх = 0,
Rу = ∑ Fку =
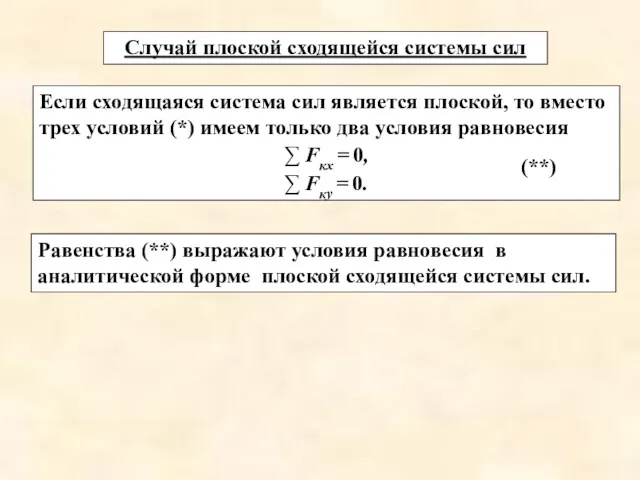
Случай плоской сходящейся системы сил
Равенства (**) выражают условия равновесия в аналитической
Случай плоской сходящейся системы сил
Равенства (**) выражают условия равновесия в аналитической
А
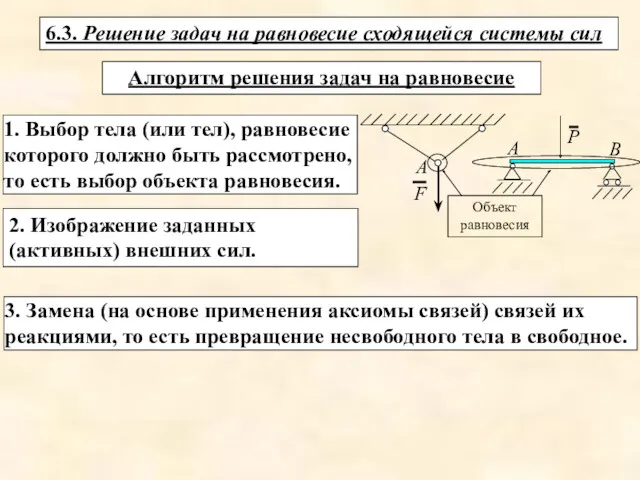
6.3. Решение задач на равновесие сходящейся системы сил
Алгоритм решения задач
А
6.3. Решение задач на равновесие сходящейся системы сил
Алгоритм решения задач
5. Определение искомых величин.
4. Составление уравнений равновесия для системы сил, приложенной
5. Определение искомых величин.
4. Составление уравнений равновесия для системы сил, приложенной
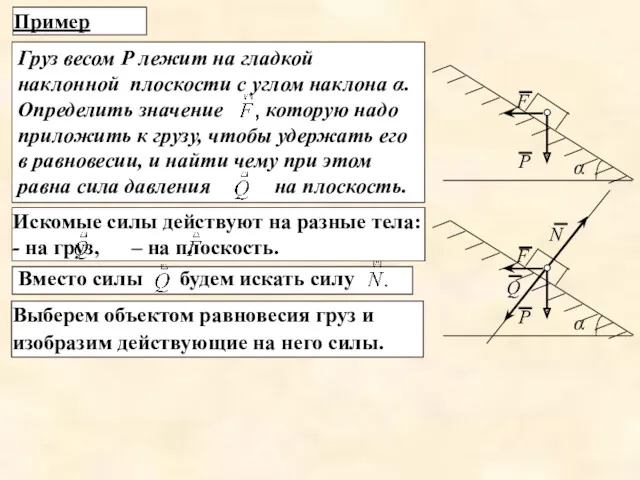
Пример
Выберем объектом равновесия груз и изобразим действующие на него силы.
Пример
Выберем объектом равновесия груз и изобразим действующие на него силы.
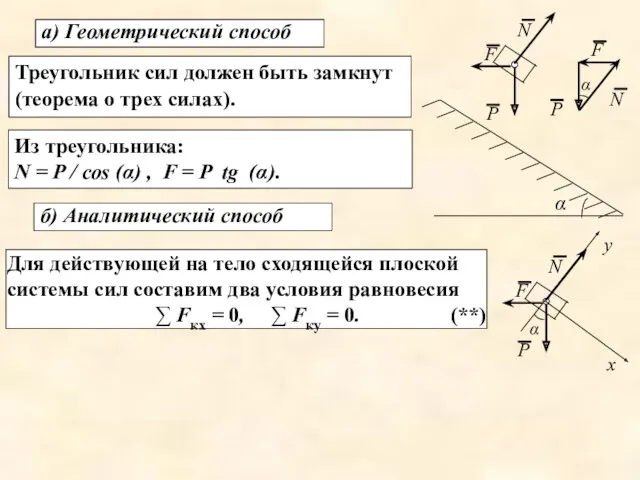
а) Геометрический способ
Треугольник сил должен быть замкнут (теорема о трех силах).
α
Из
а) Геометрический способ
Треугольник сил должен быть замкнут (теорема о трех силах).
α
Из
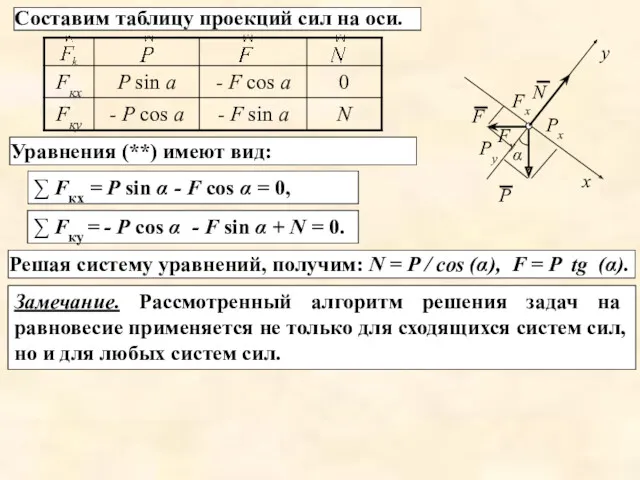
Составим таблицу проекций сил на оси.
α
Px
Pу
Fx
Fу
Уравнения (**) имеют вид:
∑ Fкх
Составим таблицу проекций сил на оси.
α
Px
Pу
Fx
Fу
Уравнения (**) имеют вид:
∑ Fкх
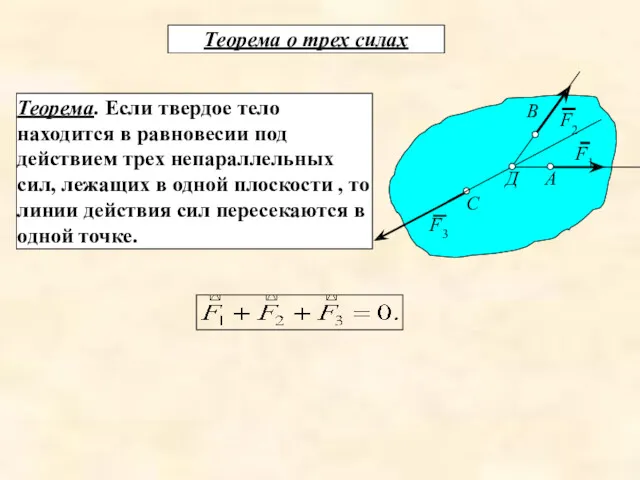
Теорема о трех силах
Теорема. Если твердое тело находится в равновесии под
Теорема о трех силах
Теорема. Если твердое тело находится в равновесии под
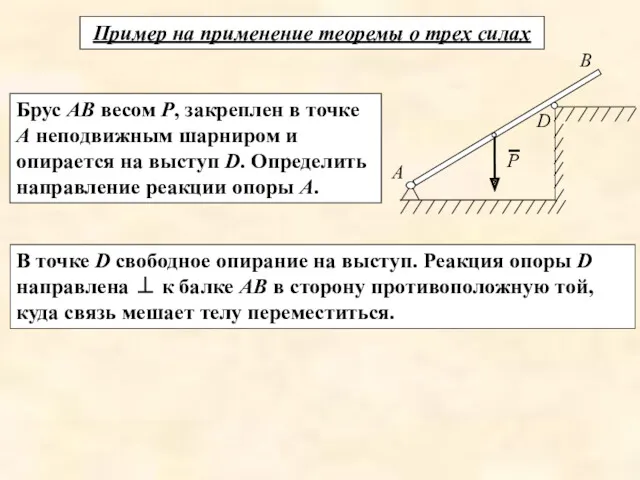
Пример на применение теоремы о трех силах
Брус АВ весом Р, закреплен
Пример на применение теоремы о трех силах
Брус АВ весом Р, закреплен
 Принцип суперпозиции полей
Принцип суперпозиции полей Молекулярно-кинетические свойства коллоидных систем
Молекулярно-кинетические свойства коллоидных систем Закон инерции. Взаимодействие тел. Масса тела
Закон инерции. Взаимодействие тел. Масса тела Неньютоновская жидкость
Неньютоновская жидкость Магнитные свойства вещества. 10 класс
Магнитные свойства вещества. 10 класс Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов
Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов Зубчатые передачи
Зубчатые передачи Условие равновесия рычага
Условие равновесия рычага Ядерные энергетические установки прямого и машинного преобразования энергии космического и напланетного назначения
Ядерные энергетические установки прямого и машинного преобразования энергии космического и напланетного назначения Решение задач. Закон всемирного тяготения.
Решение задач. Закон всемирного тяготения. Расчет магистрального газопровода
Расчет магистрального газопровода Презентация для будущих первоклассников на тему Я - наблюдатель
Презентация для будущих первоклассников на тему Я - наблюдатель Архимед күші
Архимед күші Устройство и техническое обслуживание аккумуляторных батарей
Устройство и техническое обслуживание аккумуляторных батарей Световые явления в живой и неживой природе
Световые явления в живой и неживой природе Проектування розвитку електричної мережі 110 кВ Полтавської області
Проектування розвитку електричної мережі 110 кВ Полтавської області Излучение и поглощение энергии атомами и молекулами. Лазеры
Излучение и поглощение энергии атомами и молекулами. Лазеры Бағытталған максимальді ток қорғанысы
Бағытталған максимальді ток қорғанысы Rotation of rigid bodies. Angular momentum and torque. Properties of fluids
Rotation of rigid bodies. Angular momentum and torque. Properties of fluids Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты Электрический ток в жидкостях
Электрический ток в жидкостях Судовые двигатели
Судовые двигатели Сила Архимеда
Сила Архимеда Оборудование для смазочно-заправочных работ
Оборудование для смазочно-заправочных работ Точність обробки. (Лекция 3)
Точність обробки. (Лекция 3) Обработка экспериментальных данных. Часть 2
Обработка экспериментальных данных. Часть 2 Женские тропинки в космосе
Женские тропинки в космосе Параллельное и последовательное соединение проводников
Параллельное и последовательное соединение проводников