Слайд 2
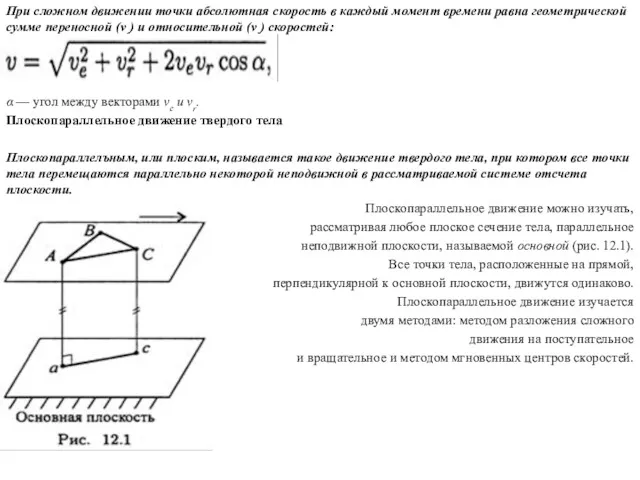
При сложном движении точки абсолютная скорость в каждый момент времени равна
геометрической сумме переносной (ve) и относительной (vr) скоростей:
α — угол между векторами ve и vr.
Плоскопараллельное движение твердого тела
Плоскопараллелъным, или плоским, называется такое движение твердого тела, при котором все точки тела перемещаются параллельно некоторой неподвижной в рассматриваемой системе отсчета плоскости.
Плоскопараллельное движение можно изучать,
рассматривая любое плоское сечение тела, параллельное
неподвижной плоскости, называемой основной (рис. 12.1).
Все точки тела, расположенные на прямой,
перпендикулярной к основной плоскости, движутся одинаково.
Плоскопараллельное движение изучается
двумя методами: методом разложения сложного
движения на поступательное
и вращательное и методом мгновенных центров скоростей.
Слайд 3
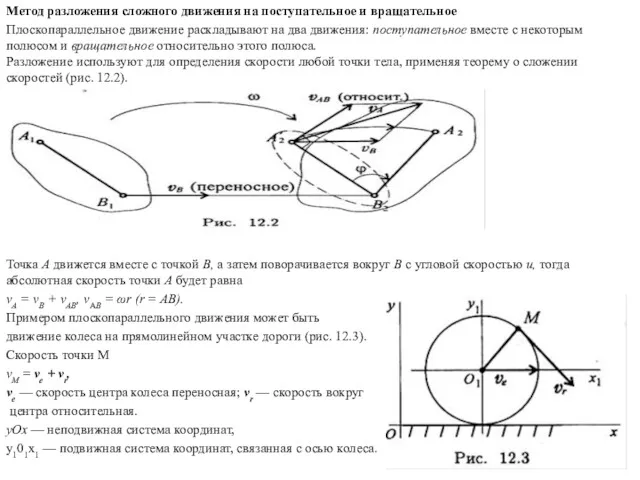
Метод разложения сложного движения на поступательное и вращательное
Плоскопараллельное движение раскладывают на
два движения: поступательное вместе с некоторым полюсом и вращательное относительно этого полюса.
Разложение используют для определения скорости любой точки тела, применяя теорему о сложении скоростей (рис. 12.2).
Точка А движется вместе с точкой В, а затем поворачивается вокруг В с угловой скоростью и, тогда абсолютная скорость точки А будет равна
vA = vB + vAB, vAB = ωr (r = АВ).
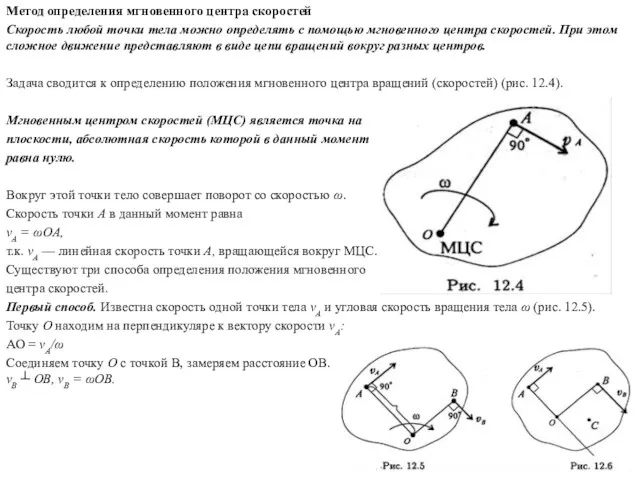
Примером плоскопараллельного движения может быть
движение колеса на прямолинейном участке дороги (рис. 12.3).
Скорость точки М
vM = ve + vr,
ve — скорость центра колеса переносная; vr — скорость вокруг
центра относительная.
уОх — неподвижная система координат,
y101x1 — подвижная система координат, связанная с осью колеса.
Слайд 4
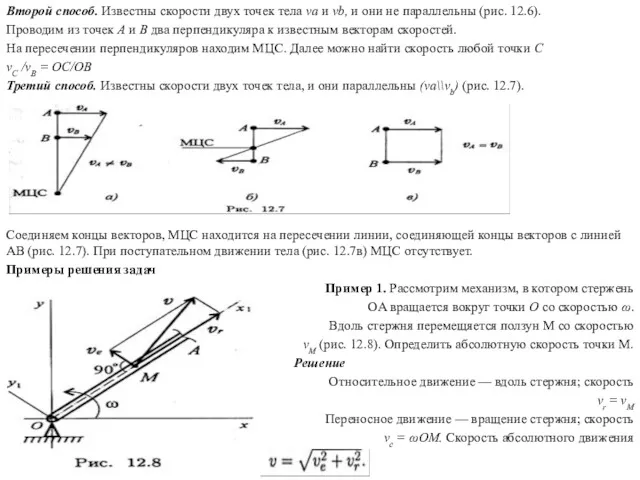
Метод определения мгновенного центра скоростей
Скорость любой точки тела можно определять с
помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Задача сводится к определению положения мгновенного центра вращений (скоростей) (рис. 12.4).
Мгновенным центром скоростей (МЦС) является точка на
плоскости, абсолютная скорость которой в данный момент
равна нулю.
Вокруг этой точки тело совершает поворот со скоростью ω.
Скорость точки А в данный момент равна
vA = ωOA,
т.к. vA — линейная скорость точки А, вращающейся вокруг МЦС.
Существуют три способа определения положения мгновенного
центра скоростей.
Первый способ. Известна скорость одной точки тела vA и угловая скорость вращения тела ω (рис. 12.5).
Точку О находим на перпендикуляре к вектору скорости vA:
AO = vA/ω
Соединяем точку О с точкой B, замеряем расстояние ОВ.
vB ┴ ОВ, vB = ωОВ.
Слайд 5
Второй способ. Известны скорости двух точек тела va и vb, и
они не параллельны (рис. 12.6).
Проводим из точек А и В два перпендикуляра к известным векторам скоростей.
На пересечении перпендикуляров находим МЦС. Далее можно найти скорость любой точки С
vC /vB = OC/OB
Третий способ. Известны скорости двух точек тела, и они параллельны (va\\vb) (рис. 12.7).
Соединяем концы векторов, МЦС находится на пересечении линии, соединяющей концы векторов с линией АВ (рис. 12.7). При поступательном движении тела (рис. 12.7в) МЦС отсутствует.
Примеры решения задач
Пример 1. Рассмотрим механизм, в котором стержень
OA вращается вокруг точки О со скоростью ω.
Вдоль стержня перемещяется ползун М со скоростью
vM (рис. 12.8). Определить абсолютную скорость точки М.
Решение
Относительное движение — вдоль стержня; скорость
vr = vM
Переносное движение — вращение стержня; скорость
ve = ωОМ. Скорость абсолютного движения
Слайд 6
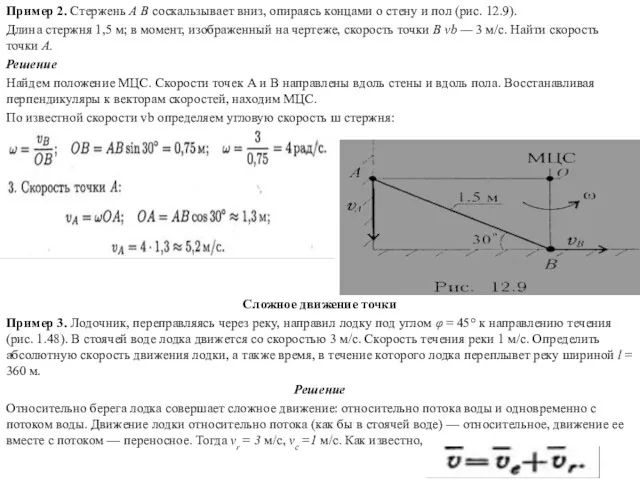
Пример 2. Стержень А В соскальзывает вниз, опираясь концами о стену
и пол (рис. 12.9).
Длина стержня 1,5 м; в момент, изображенный на чертеже, скорость точки В vb — 3 м/с. Найти скорость точки А.
Решение
Найдем положение МЦС. Скорости точек А и В направлены вдоль стены и вдоль пола. Восстанавливая перпендикуляры к векторам скоростей, находим МЦС.
По известной скорости vb определяем угловую скорость ш стержня:
Сложное движение точки
Пример 3. Лодочник, переправляясь через реку, направил лодку под углом φ = 45° к направлению течения (рис. 1.48). В стоячей воде лодка движется со скоростью 3 м/с. Скорость течения реки 1 м/с. Определить абсолютную скорость движения лодки, а также время, в течение которого лодка переплывет реку шириной l = 360 м.
Решение
Относительно берега лодка совершает сложное движение: относительно потока воды и одновременно с потоком воды. Движение лодки относительно потока (как бы в стоячей воде) — относительное, движение ее вместе с потоком — переносное. Тогда vr = 3 м/с, ve =1 м/с. Как известно,
Слайд 7
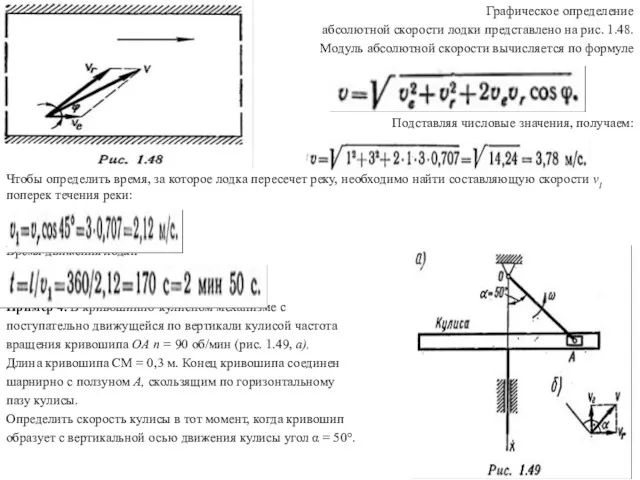
Графическое определение
абсолютной скорости лодки представлено на рис. 1.48.
Модуль абсолютной скорости
вычисляется по формуле
Подставляя числовые значения, получаем:
Чтобы определить время, за которое лодка пересечет реку, необходимо найти составляющую скорости vl поперек течения реки:
Время движения лодки
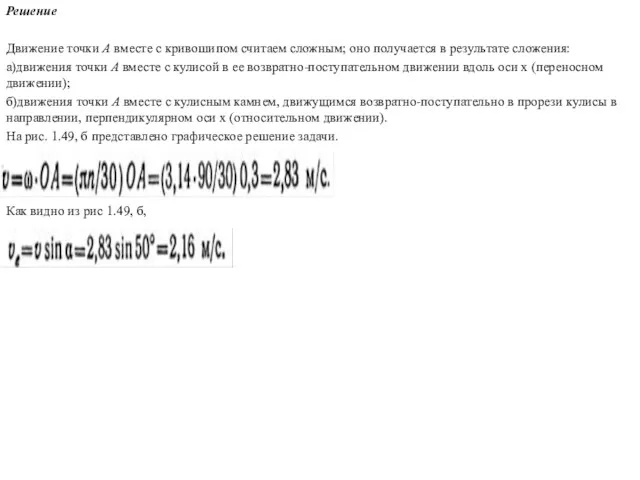
Пример 4. В кривошипно-кулисном механизме с
поступательно движущейся по вертикали кулисой частота
вращения кривошипа OA п = 90 об/мин (рис. 1.49, а).
Длина кривошипа СМ = 0,3 м. Конец кривошипа соединен
шарнирно с ползуном А, скользящим по горизонтальному
пазу кулисы.
Определить скорость кулисы в тот момент, когда кривошип
образует с вертикальной осью движения кулисы угол α = 50°.
Слайд 8
Решение
Движение точки А вместе с кривошипом считаем сложным; оно получается в
результате сложения:
а)движения точки А вместе с кулисой в ее возвратно-поступательном движении вдоль оси х (переносном движении);
б)движения точки А вместе с кулисным камнем, движущимся возвратно-поступательно в прорези кулисы в направлении, перпендикулярном оси х (относительном движении).
На рис. 1.49, б представлено графическое решение задачи.
Как видно из рис 1.49, б,

 Основы молекулярно-кинетической теории и термодинамики. (Лекция 9)
Основы молекулярно-кинетической теории и термодинамики. (Лекция 9) Razele x
Razele x Коллиматор. Разновидности коллиматоров. Виды тест-объектов. Зрительная труба. Диоптрийная трубка
Коллиматор. Разновидности коллиматоров. Виды тест-объектов. Зрительная труба. Диоптрийная трубка Устройство колесных пар
Устройство колесных пар Геометрическая оптика. Законы распространения света
Геометрическая оптика. Законы распространения света Тепловые двигатели и их влияние на окружающую среду
Тепловые двигатели и их влияние на окружающую среду Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов
Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов Голограми
Голограми Фазированные антенные решетки и их назначение. Типы диаграммоформирования
Фазированные антенные решетки и их назначение. Типы диаграммоформирования Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты. 8 класс
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты. 8 класс Равноускоренное прямолинейное движение
Равноускоренное прямолинейное движение Конвективный теплообмен
Конвективный теплообмен Ходовая часть гусеничного трактора
Ходовая часть гусеничного трактора К отчету по качеству
К отчету по качеству Поляризация света
Поляризация света Инерция
Инерция Lektsia_14_Lazery
Lektsia_14_Lazery Овощи и фрукты как альтернативные источники энергии
Овощи и фрукты как альтернативные источники энергии Спин – орбитальная связь
Спин – орбитальная связь Развёрнутый план - конспект урока по физике в 8 классе Кипение
Развёрнутый план - конспект урока по физике в 8 классе Кипение Law of conservation of momentum
Law of conservation of momentum Анализ физико-химического состава почвы пришкольного участка
Анализ физико-химического состава почвы пришкольного участка Дополнение к трехфазным цепям. Лекция 15
Дополнение к трехфазным цепям. Лекция 15 Звуковые волны. 9 класс
Звуковые волны. 9 класс Феромагнетики. Феромагнітне тіло
Феромагнетики. Феромагнітне тіло Дизельное топливо
Дизельное топливо Пара сил. Момент
Пара сил. Момент Галерея автомобилей
Галерея автомобилей