- Строительная механика. Методы определения силовых факторов в деформируемых системах

Содержание
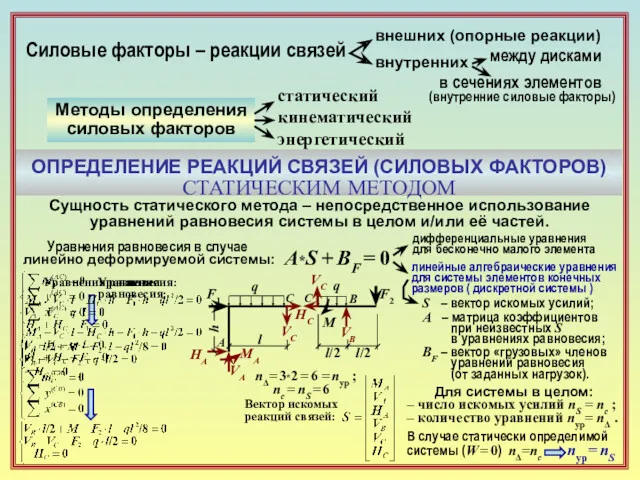
- 2. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 3. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 4. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 5. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
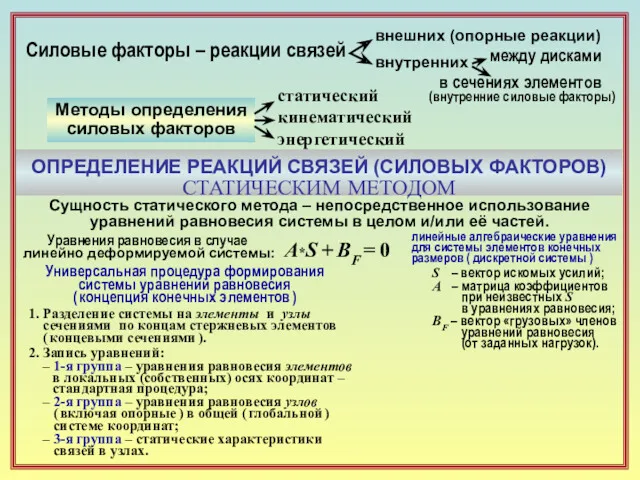
- 6. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) СТАТИЧЕСКИМ МЕТОДОМ A*S + BF = 0 Универсальная процедура формирования системы
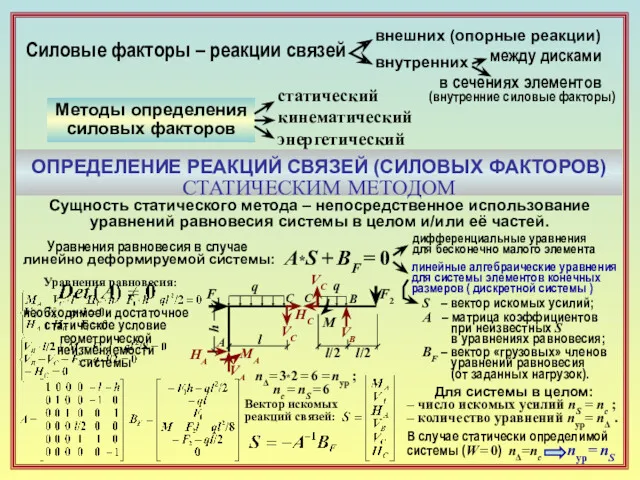
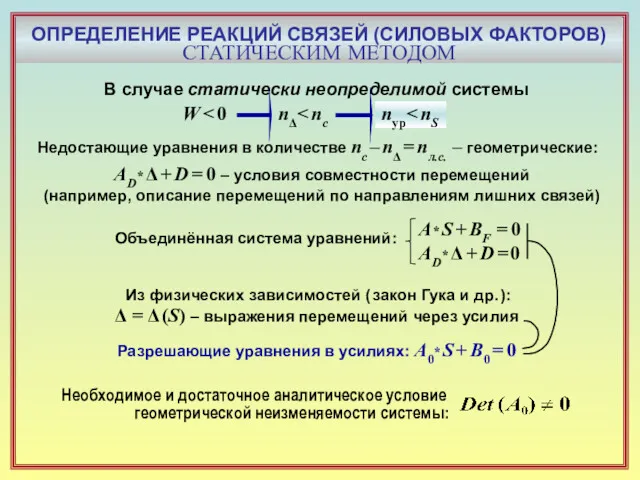
- 7. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) СТАТИЧЕСКИМ МЕТОДОМ В случае статически неопределимой системы W nΔ nyp Недостающие
- 8. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) КИНЕМАТИЧЕСКИМ МЕТОДОМ В основе метода – принцип возможных перемещений ( принцип
- 9. Возможные (виртуальные) перемещения – а) бесконечно малые ( для линейно деформируемых систем – конечные, но малые
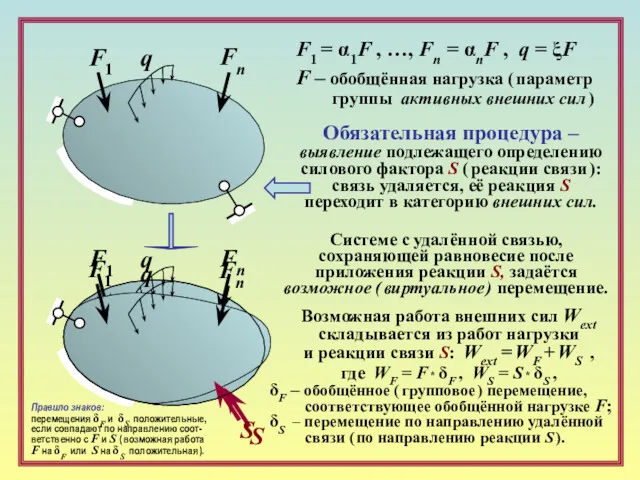
- 10. q F1 Fn F1 = α1F , …, Fn = αnF , q = ξF F
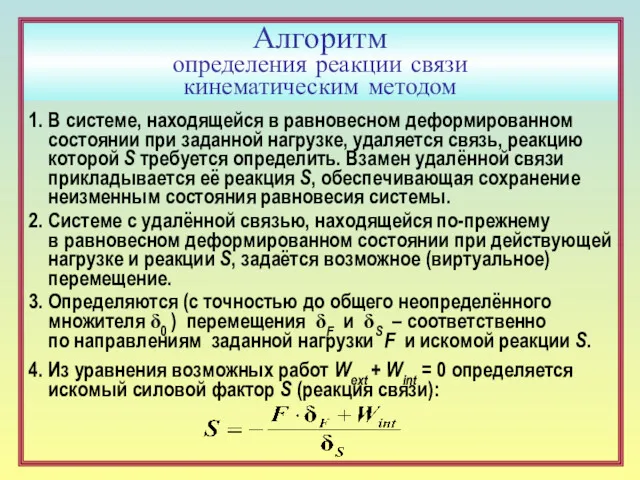
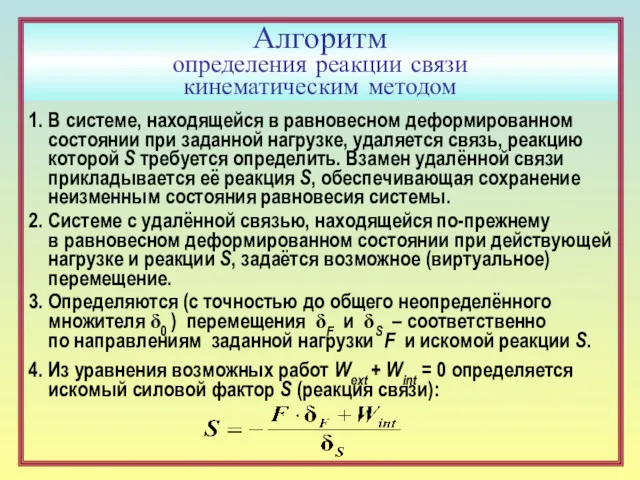
- 11. Алгоритм определения реакции связи кинематическим методом 1. В системе, находящейся в равновесном деформированном состоянии при заданной
- 12. Алгоритм определения реакции связи кинематическим методом 1. В системе, находящейся в равновесном деформированном состоянии при заданной
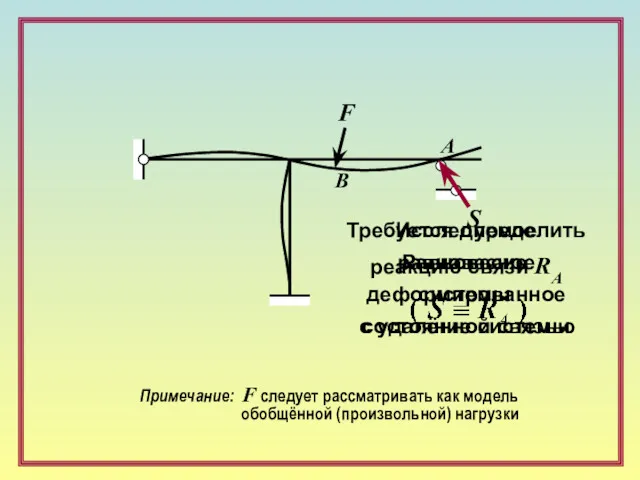
- 13. А Требуется определить реакцию связи RA B F Исследуемое равновесное деформированное состояние системы S Равновесие системы
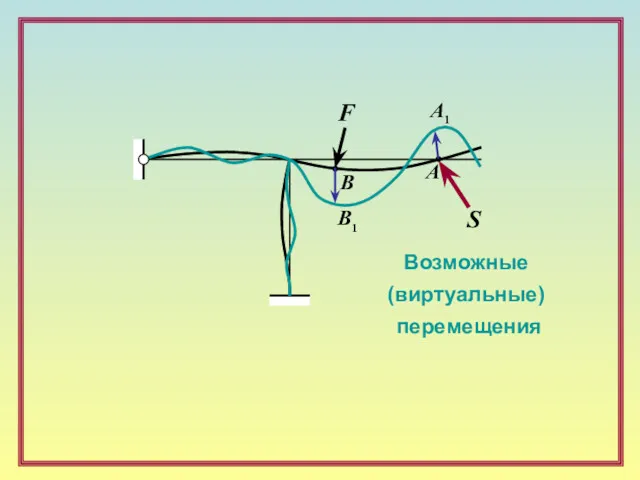
- 14. B F А S Возможные (виртуальные) перемещения B1 A1
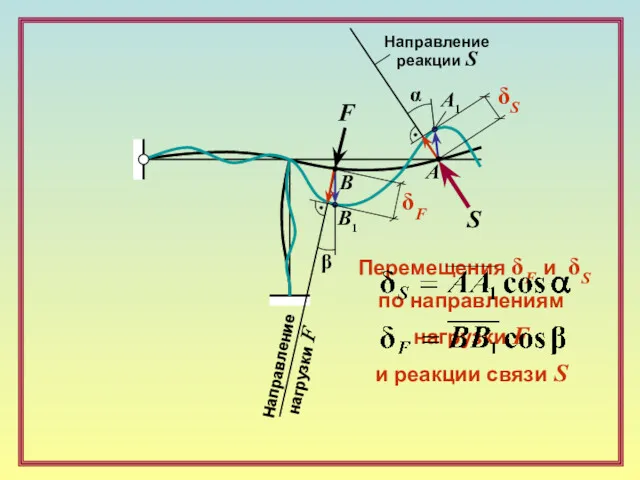
- 15. B F А S Перемещения δF и δS по направлениям нагрузки F и реакции связи S
- 16. Удаление внутренних связей . Смысл перемещения δS 1. Удаление внутренней угловой связи для определения изгибающего момента
- 17. Удаление внутренних связей . Смысл перемещения δS 2. Удаление внутренней линейной связи для определения поперечной силы
- 18. Удаление внутренних связей . Смысл перемещения δS 2. Удаление внутренней линейной связи для определения поперечной силы
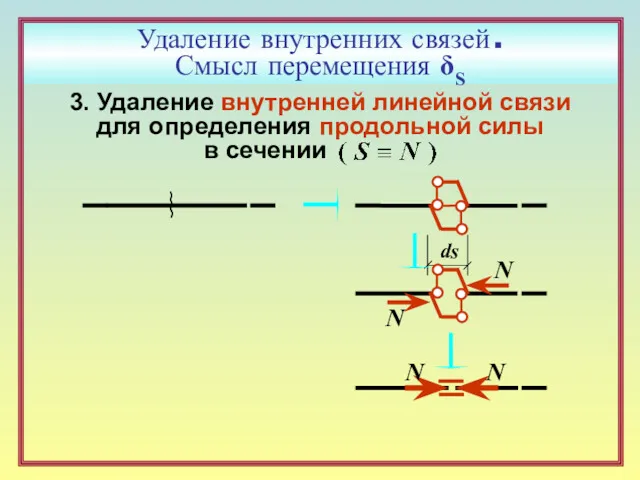
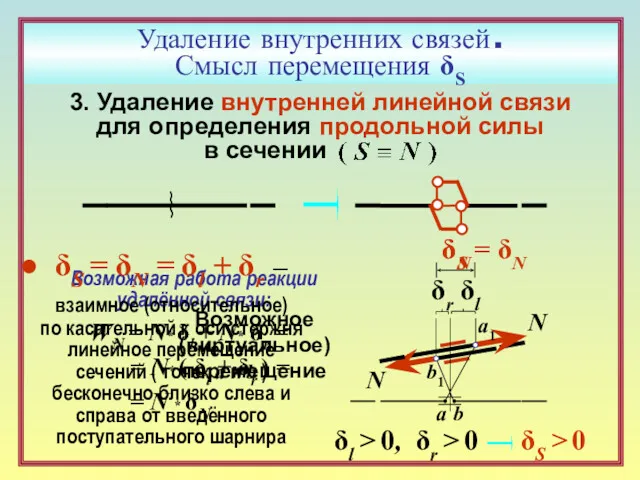
- 19. Удаление внутренних связей . Смысл перемещения δS 3. Удаление внутренней линейной связи для определения продольной силы
- 20. Удаление внутренних связей . Смысл перемещения δS 3. Удаление внутренней линейной связи для определения продольной силы
- 21. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ Силовой фактор S в линейно деформируемой системе определяется как
- 22. К о н т р о л ь н ы е в о п р о
- 24. Скачать презентацию
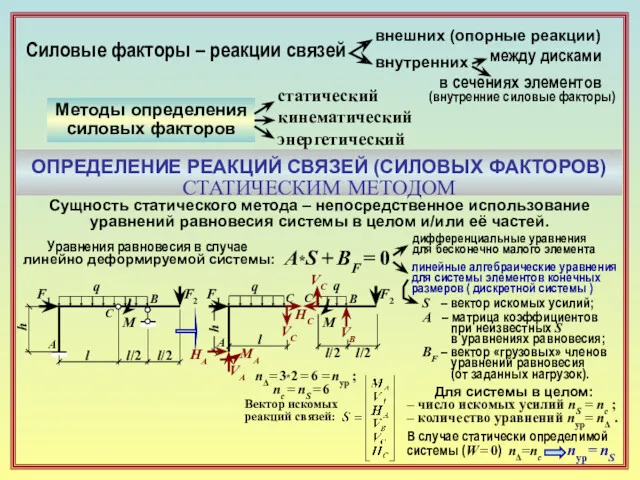
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
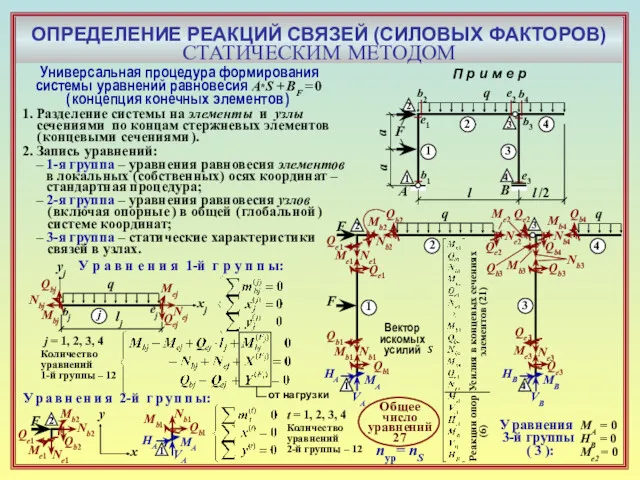
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
A*S + BF = 0
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
A*S + BF = 0
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
В случае статически неопределимой системы
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
В случае статически неопределимой системы
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
(СИЛОВЫХ ФАКТОРОВ)
КИНЕМАТИЧЕСКИМ МЕТОДОМ
В основе метода – принцип
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
(СИЛОВЫХ ФАКТОРОВ)
КИНЕМАТИЧЕСКИМ МЕТОДОМ
В основе метода – принцип
Возможные (виртуальные)
перемещения –
а) бесконечно малые ( для линейно
деформируемых
Возможные (виртуальные)
перемещения –
а) бесконечно малые ( для линейно
деформируемых
q
F1
Fn
F1 = α1F , …, Fn = αnF , q =
q
F1
Fn
F1 = α1F , …, Fn = αnF , q =
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
А
Требуется определить
реакцию связи RA
B
F
Исследуемое
равновесное
деформированное
состояние системы
S
Равновесие
системы
с удалённой связью
Примечание: F следует рассматривать
А
Требуется определить
реакцию связи RA
B
F
Исследуемое
равновесное
деформированное
состояние системы
S
Равновесие
системы
с удалённой связью
Примечание: F следует рассматривать
B
F
А
S
Возможные
(виртуальные)
перемещения
B1
A1
B
F
А
S
Возможные
(виртуальные)
перемещения
B1
A1
B
F
А
S
Перемещения δF и δS
по направлениям
нагрузки F
и реакции связи S
B1
A1
Направление
нагрузки
B
F
А
S
Перемещения δF и δS
по направлениям
нагрузки F
и реакции связи S
B1
A1
Направление
нагрузки

Удаление внутренних связей .
Смысл перемещения δS
1. Удаление внутренней угловой связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
1. Удаление внутренней угловой связи
для определения
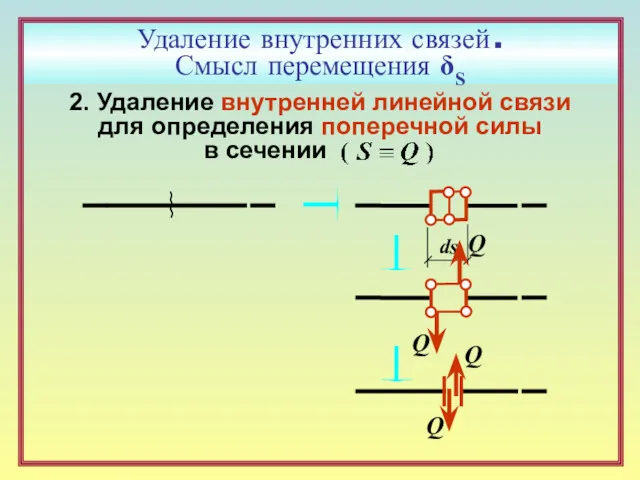
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
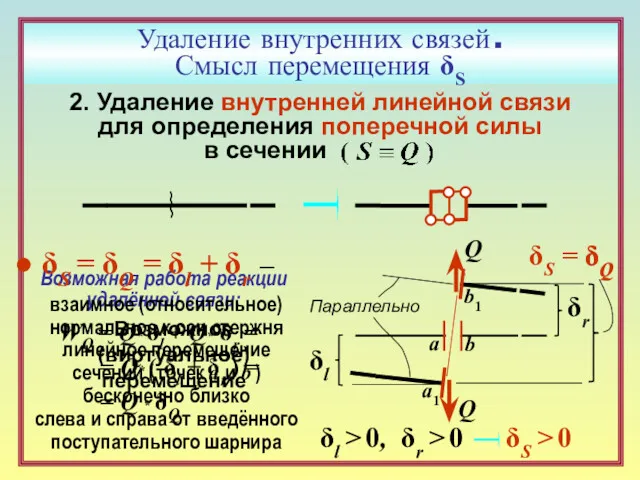
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Силовой фактор S в линейно
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Силовой фактор S в линейно
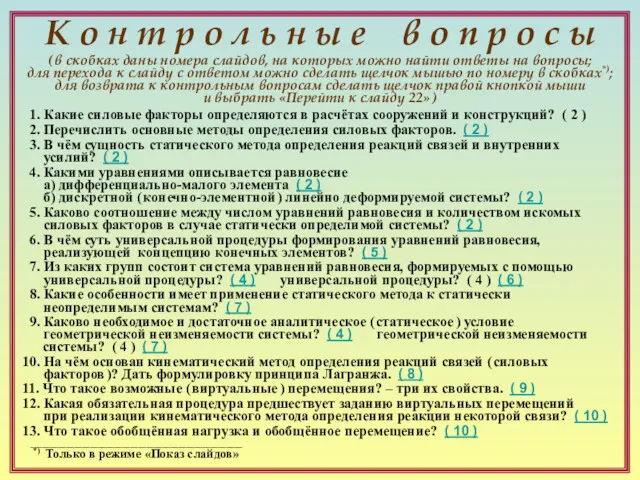
К о н т р о л ь н ы е
К о н т р о л ь н ы е
 Силы в механике
Силы в механике Механика материалов
Механика материалов Правило Ленца
Правило Ленца 1093724 (1)
1093724 (1) Материалы квантовой и оптоэлектроники. (Лекция 14.6)
Материалы квантовой и оптоэлектроники. (Лекция 14.6) Металлический водород
Металлический водород Передача информации с помощью электромагнитных волн
Передача информации с помощью электромагнитных волн урок-перезентация Закон всемирного тяготения
урок-перезентация Закон всемирного тяготения Коливання
Коливання Электрический ток в жидкостях
Электрический ток в жидкостях Презентация к уроку по теме Способы изменения внутренней энергии(8 класс)
Презентация к уроку по теме Способы изменения внутренней энергии(8 класс) Презентация по физике Равновесие тел для 10 класса
Презентация по физике Равновесие тел для 10 класса Давление твердых тел, жидкостей и газов. Своя игра по физике
Давление твердых тел, жидкостей и газов. Своя игра по физике Основные понятия и аксиомы
Основные понятия и аксиомы Электроемкость. Конденсаторы
Электроемкость. Конденсаторы От чего зависит сила Архимеда? Гипотеза. (1)
От чего зависит сила Архимеда? Гипотеза. (1) Количество теплоты. 8 класс
Количество теплоты. 8 класс “Перемещение”
“Перемещение” Шкала электромагнтных излучений
Шкала электромагнтных излучений открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Форма и ширина спектральной линии
Форма и ширина спектральной линии Газовые законы
Газовые законы Решение задач по теме Силы. 7 класс
Решение задач по теме Силы. 7 класс История создания швейной машинки
История создания швейной машинки 20230930_sila_treniya
20230930_sila_treniya Кроссворд Лесенка. (физика, 7 кл.)
Кроссворд Лесенка. (физика, 7 кл.) Механические колебания
Механические колебания Советский грузовой мотороллер Муравей
Советский грузовой мотороллер Муравей