- Структурный анализ плоских механизмов

Содержание
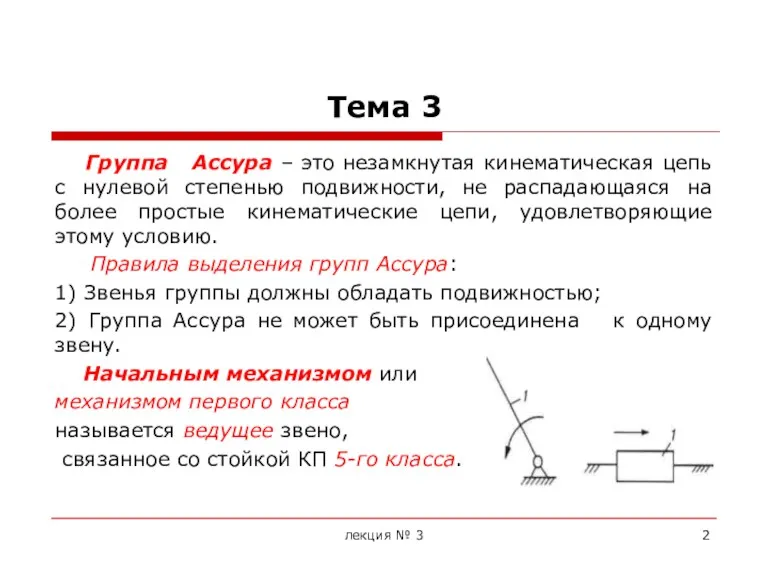
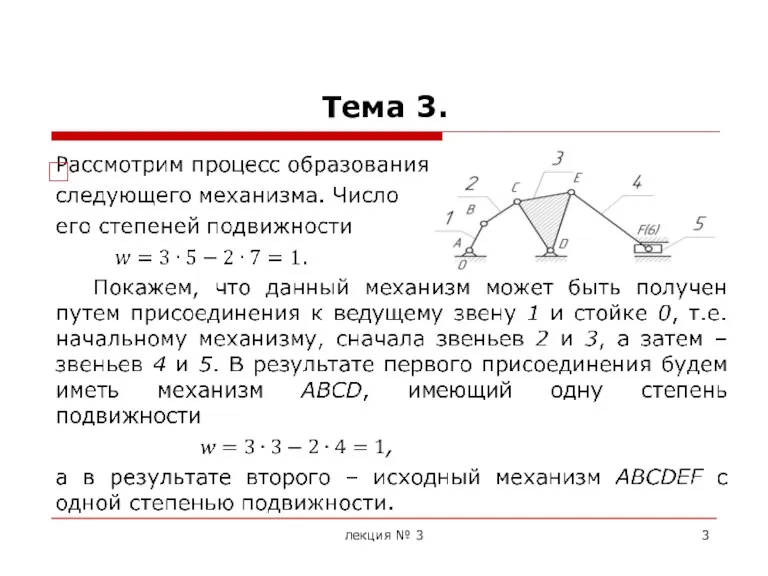
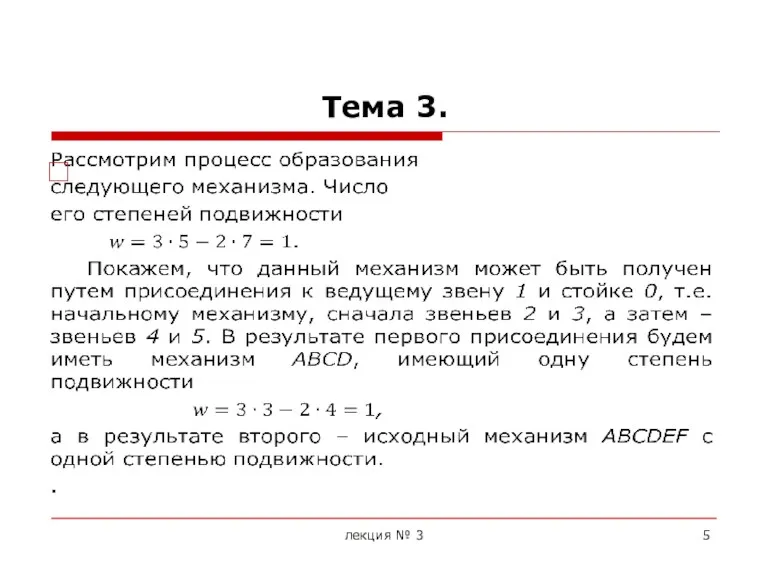
- 2. Тема 3 Группа Ассура – это незамкнутая кинематическая цепь с нулевой степенью подвижности, не распадающаяся на
- 3. Тема 3. лекция № 3
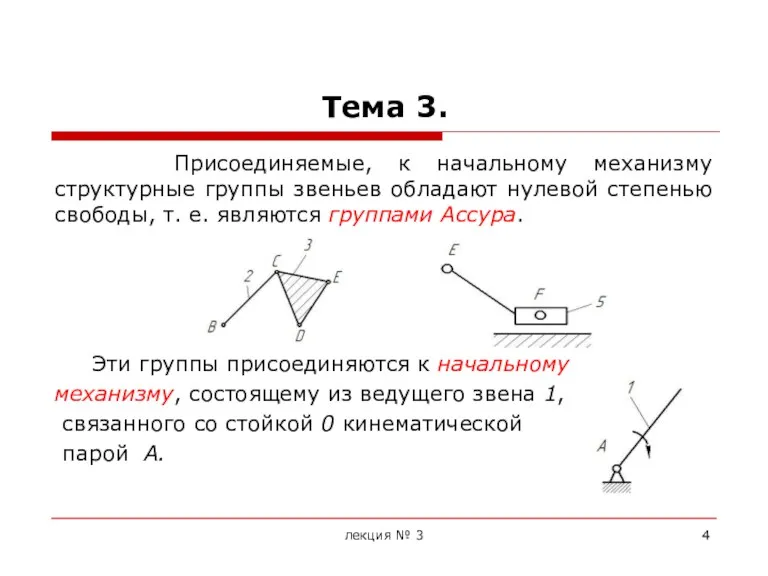
- 4. Тема 3. Присоединяемые, к начальному механизму структурные группы звеньев обладают нулевой степенью свободы, т. е. являются
- 5. Тема 3. лекция № 3
- 6. Тема 3. Группы Ассура делятся на классы, имеют различный порядок и вид. Класс группы Ассура определяется
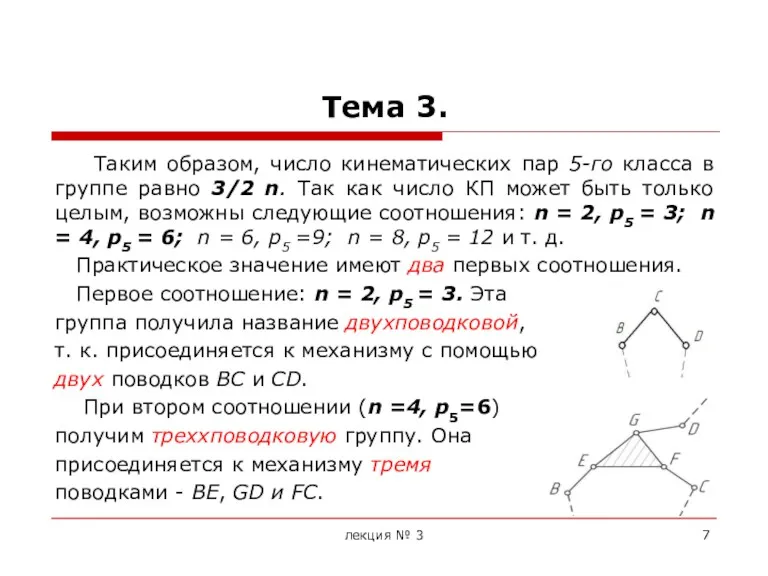
- 7. Тема 3. Таким образом, число кинематических пар 5-го класса в группе равно 3/2 n. Так как
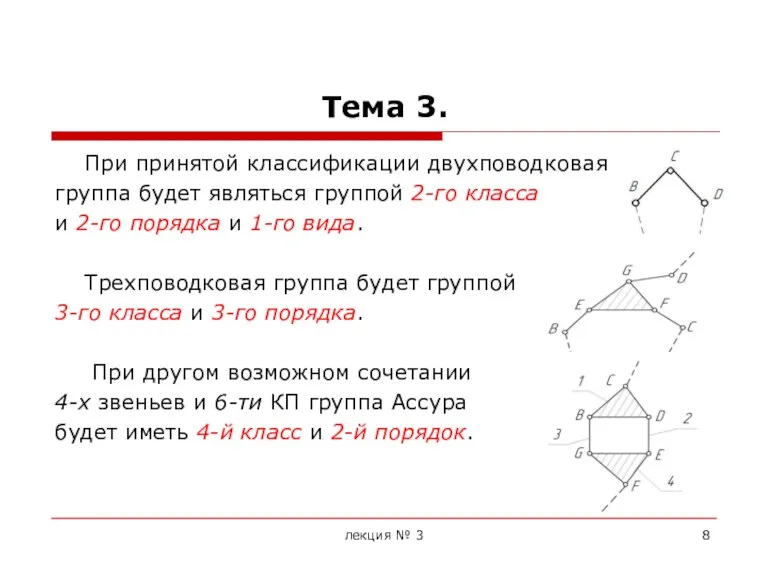
- 8. Тема 3. При принятой классификации двухповодковая группа будет являться группой 2-го класса и 2-го порядка и
- 9. Тема 3. лекция № 3
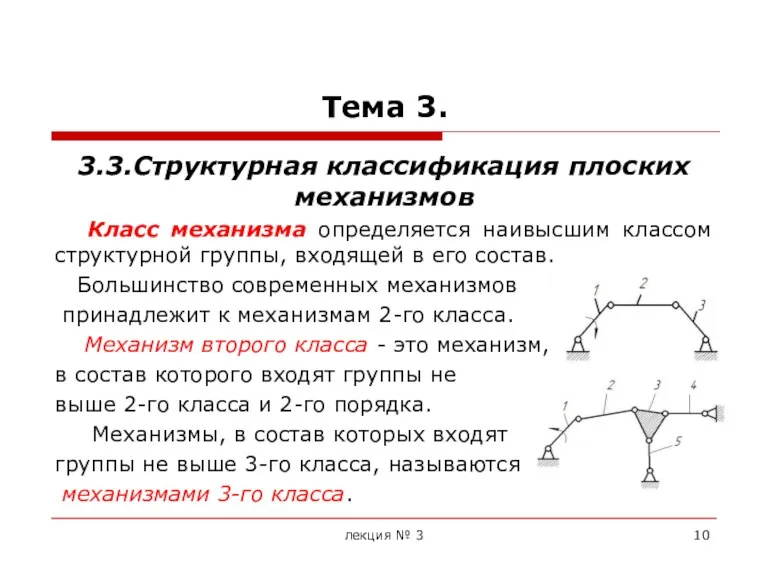
- 10. Тема 3. 3.3.Структурная классификация плоских механизмов Класс механизма определяется наивысшим классом структурной группы, входящей в его
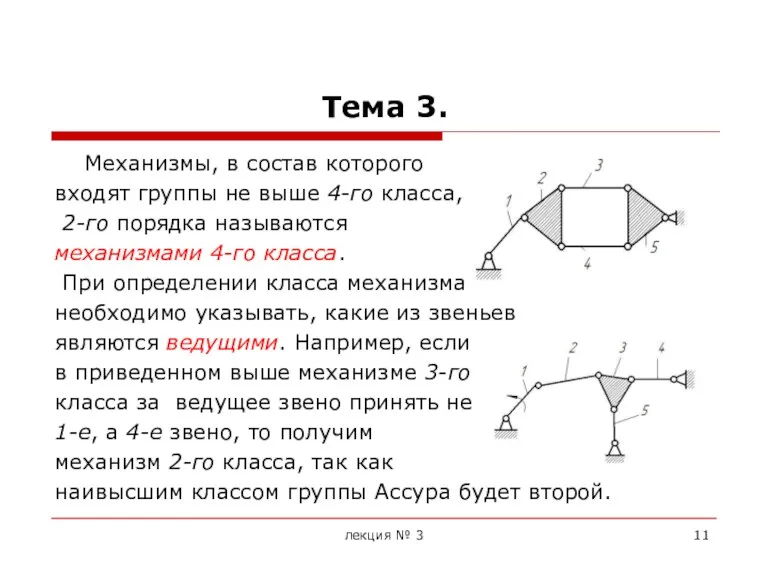
- 11. Тема 3. Механизмы, в состав которого входят группы не выше 4-го класса, 2-го порядка называются механизмами
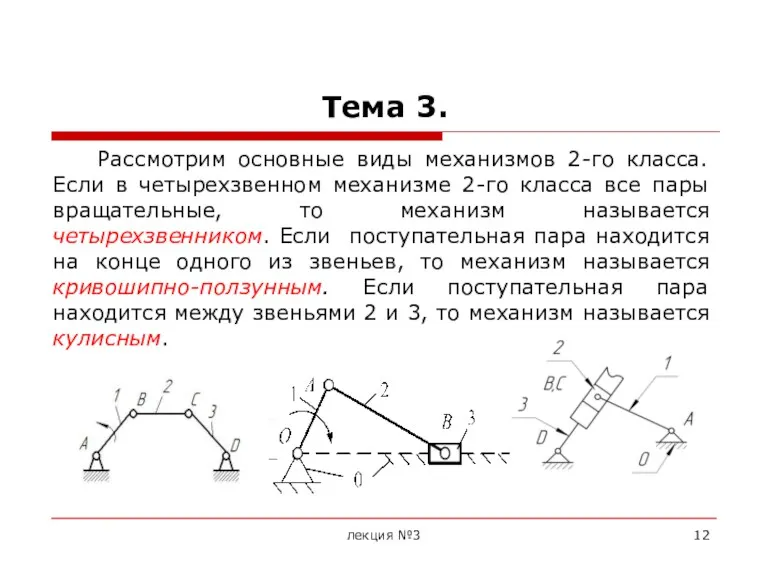
- 12. Тема 3. Рассмотрим основные виды механизмов 2-го класса. Если в четырехзвенном механизме 2-го класса все пары
- 13. Тема 3. 3.4. Порядок структурного анализа механизмов Структурный анализ механизма следует проводить путем расчленения его на
- 14. Тема 3. Последовательность структурного анализа 1. Определить вид механизма. 2. Обозначить все звенья механизма и дать
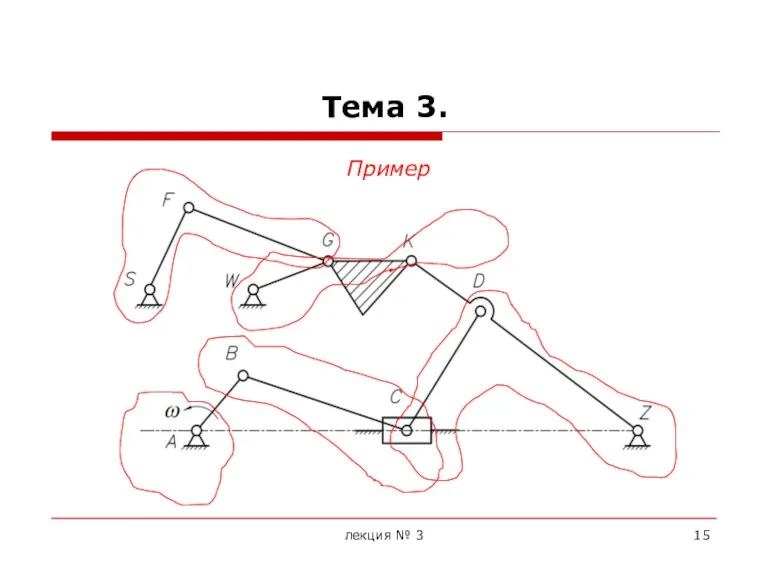
- 15. Тема 3. Пример лекция № 3
- 16. Тема 4. Кинематический анализ 4.1. Задачи и методы кинематического анализа. Целью кинематического анализа является изучение движения
- 17. Тема 4. Исходными данными для кинематического анализа являются: – кинематическая схема механизма; – размеры всех звеньев;
- 18. Тема 4. При кинематическом анализе сложных рычажных механизмов удобно пользоваться структурными группами Ассура. Разделение сложных механизмов
- 19. лекция № 3 При кинематическом анализе используется три метода: - графический, основанный на получении кинематических диаграмм
- 20. Тема 4. Графический метод, в основном, применяется для определения закона движения и кинематических параметров только заданных
- 21. Тема 4. Этот метод дает примерно одинаковый, по точности с графическим методом, результат, однако он позволяет
- 22. Тема 4. лекция № 3
- 23. Тема 4. лекция № 3
- 24. Тема 4. лекция № 3
- 25. Лекция № 3 Тема 4. Порядок построения плана механизма. 1. Задаться масштабным коэффициентом длин и вычислить
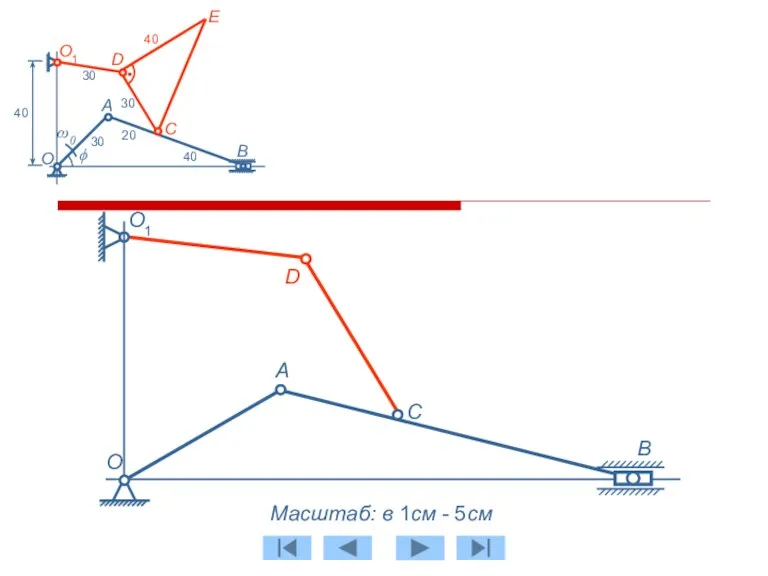
- 26. 1. Начертить в принятом масштабе длин кинематическую схему механизма при ϕ = 300. Выбираем масштаб длин
- 27. B О C ϕ ω0 D А E О1 30 30 30 40 20 40 40
- 28. Длина кривошипа ОА = 30 см В принятом масштабе: 30 / 5 = 6 см B
- 29. B О C ϕ ω0 D А E О1 30 30 30 40 20 40 40
- 30. E А B О C ϕ ω0 D А О1 30 30 30 40 20 40
- 31. E А B О C ϕ ω0 D А О1 30 30 30 40 20 40
- 32. E А B О C ϕ ω0 D А О1 30 30 30 40 20 40
- 33. E А B О C ϕ ω0 D А О1 30 30 30 40 20 40
- 34. 30 D 30 E А B О C ϕ ω0 А О1 30 40 20 40
- 35. А Масштаб: в 1см - 5см О1
- 36. А Масштаб: в 1см - 5см О1
- 37. А Масштаб: в 1см - 5см О1 30 D 30 E B О C ϕ ω0
- 38. А Масштаб: в 1см - 5см О1 30 D 30 E B О C ϕ ω0
- 39. А Масштаб: в 1см - 5см О1 30 D 30 E B О C ϕ ω0
- 40. А Масштаб: в 1см - 5см О1 30 D 30 E B О C ϕ ω0
- 41. А Масштаб: в 1см - 5см О1 E 30 20 40 30 40 30
- 42. Тема 4. 4.3. Графический метод кинематического анализа 4.3.1. Построение кинематических диаграмм Графический метод кинематического анализа основывается
- 43. Тема 4. Порядок построения совмещенных планов механизма. 1. Задаться масштабным коэффициентом длин и вычислить длины отрезков,
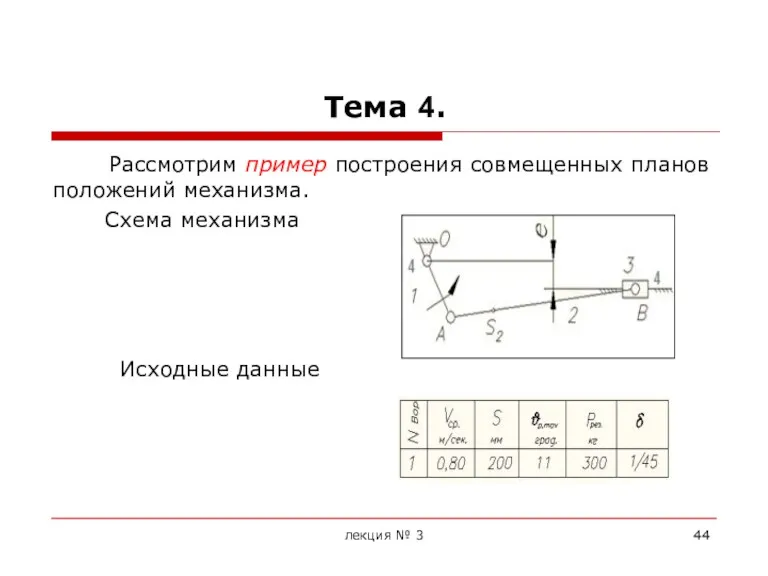
- 44. Тема 4. Рассмотрим пример построения совмещенных планов положений механизма. Схема механизма Исходные данные лекция № 3
- 45. Тема 4. лекция № 3
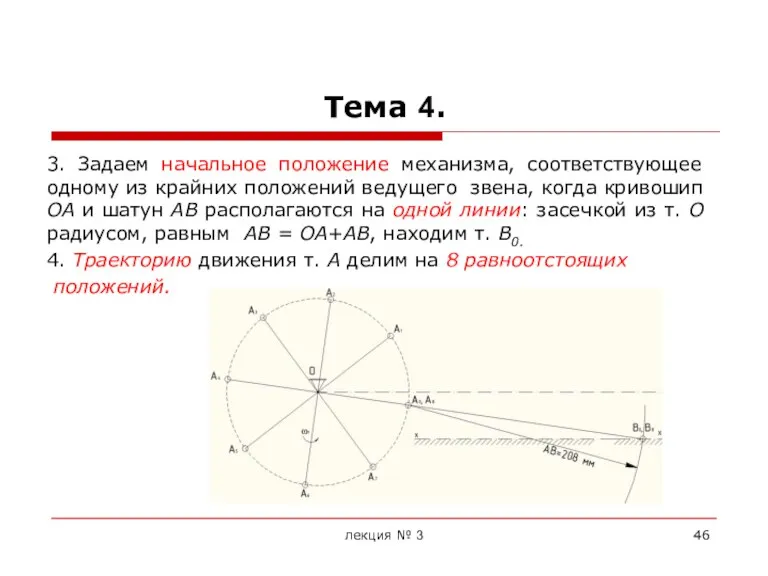
- 46. Тема 4. 3. Задаем начальное положение механизма, соответствующее одному из крайних положений ведущего звена, когда кривошип
- 48. Скачать презентацию
Тема 3
Группа Ассура – это незамкнутая кинематическая цепь с
Тема 3
Группа Ассура – это незамкнутая кинематическая цепь с
Тема 3.
лекция № 3
Тема 3.
лекция № 3
Тема 3.
Присоединяемые, к начальному механизму структурные группы звеньев обладают
Тема 3.
Присоединяемые, к начальному механизму структурные группы звеньев обладают
Тема 3.
лекция № 3
Тема 3.
лекция № 3
Тема 3.
Группы Ассура делятся на классы, имеют различный порядок
Тема 3.
Группы Ассура делятся на классы, имеют различный порядок
Тема 3.
Таким образом, число кинематических пар 5-го класса в
Тема 3.
Таким образом, число кинематических пар 5-го класса в
Тема 3.
При принятой классификации двухповодковая
группа будет являться группой 2-го
Тема 3.
При принятой классификации двухповодковая
группа будет являться группой 2-го
Тема 3.
лекция № 3
Тема 3.
лекция № 3
Тема 3.
3.3.Структурная классификация плоских механизмов
Класс механизма определяется наивысшим классом
Тема 3.
3.3.Структурная классификация плоских механизмов
Класс механизма определяется наивысшим классом
Тема 3.
Механизмы, в состав которого
входят группы не выше
Тема 3.
Механизмы, в состав которого
входят группы не выше
Тема 3.
Рассмотрим основные виды механизмов 2-го класса. Если в
Тема 3.
Рассмотрим основные виды механизмов 2-го класса. Если в
Тема 3.
3.4. Порядок структурного анализа механизмов
Структурный анализ механизма следует
Тема 3.
3.4. Порядок структурного анализа механизмов
Структурный анализ механизма следует
Тема 3.
Последовательность структурного анализа
1. Определить вид механизма.
2. Обозначить все звенья
Тема 3.
Последовательность структурного анализа
1. Определить вид механизма.
2. Обозначить все звенья
Тема 3.
Пример
лекция № 3
Тема 3.
Пример
лекция № 3

Тема 4. Кинематический анализ
4.1. Задачи и методы кинематического анализа.
Целью
Тема 4. Кинематический анализ
4.1. Задачи и методы кинематического анализа.
Целью
Тема 4.
Исходными данными для кинематического анализа являются:
– кинематическая
Тема 4.
Исходными данными для кинематического анализа являются:
– кинематическая
Тема 4.
При кинематическом анализе сложных рычажных механизмов удобно пользоваться структурными
Тема 4.
При кинематическом анализе сложных рычажных механизмов удобно пользоваться структурными

лекция № 3
При кинематическом анализе используется три метода:
- графический, основанный
лекция № 3
При кинематическом анализе используется три метода:
- графический, основанный

Тема 4.
Графический метод, в основном, применяется для определения закона
Тема 4.
Графический метод, в основном, применяется для определения закона
Тема 4.
Этот метод дает примерно одинаковый, по точности с
Тема 4.
Этот метод дает примерно одинаковый, по точности с

Тема 4.
лекция № 3
Тема 4.
лекция № 3
Тема 4.
лекция № 3
Тема 4.
лекция № 3
Тема 4.
лекция № 3
Тема 4.
лекция № 3
Лекция № 3
Тема 4.
Порядок построения плана механизма.
1. Задаться масштабным коэффициентом
Лекция № 3
Тема 4.
Порядок построения плана механизма.
1. Задаться масштабным коэффициентом
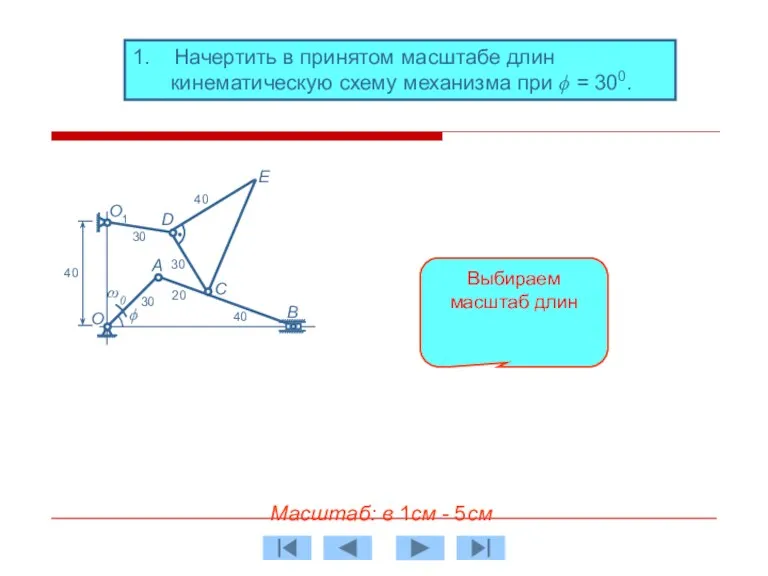
1. Начертить в принятом масштабе длин кинематическую схему механизма при ϕ
1. Начертить в принятом масштабе длин кинематическую схему механизма при ϕ

B
О
C
ϕ
ω0
D
А
E
О1
30
30
30
40
20
40
40
Строим кривошип ОА
Масштаб: в 1см - 5см
300
B
О
C
ϕ
ω0
D
А
E
О1
30
30
30
40
20
40
40
Строим кривошип ОА
Масштаб: в 1см - 5см
300
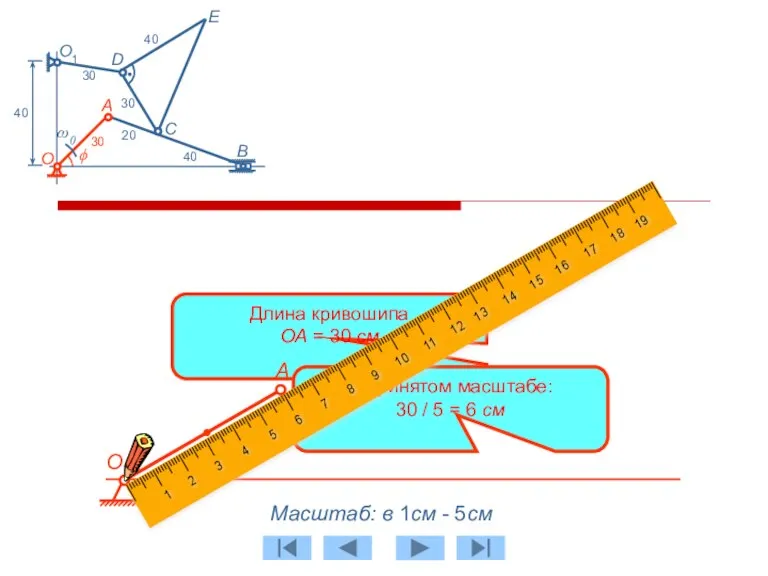
Длина кривошипа
ОА = 30 см
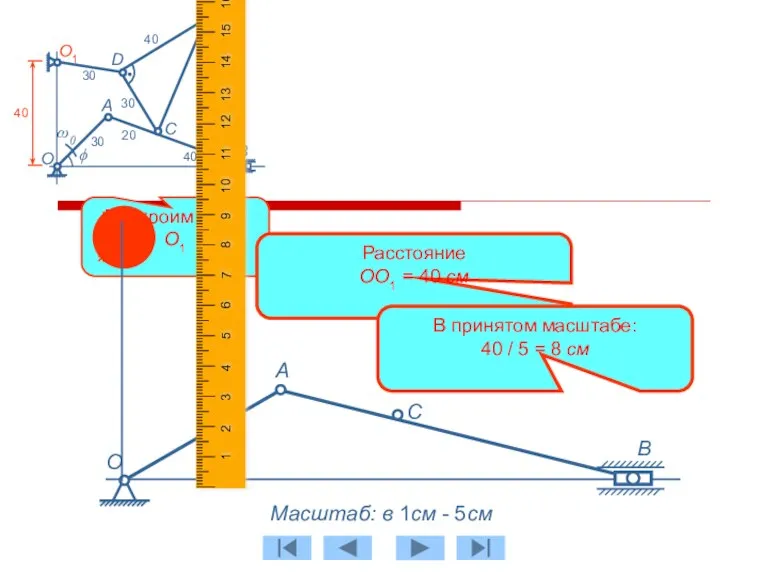
В принятом масштабе:
30 / 5 = 6
Длина кривошипа
ОА = 30 см
В принятом масштабе:
30 / 5 = 6
B
О
C
ϕ
ω0
D
А
E
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
А
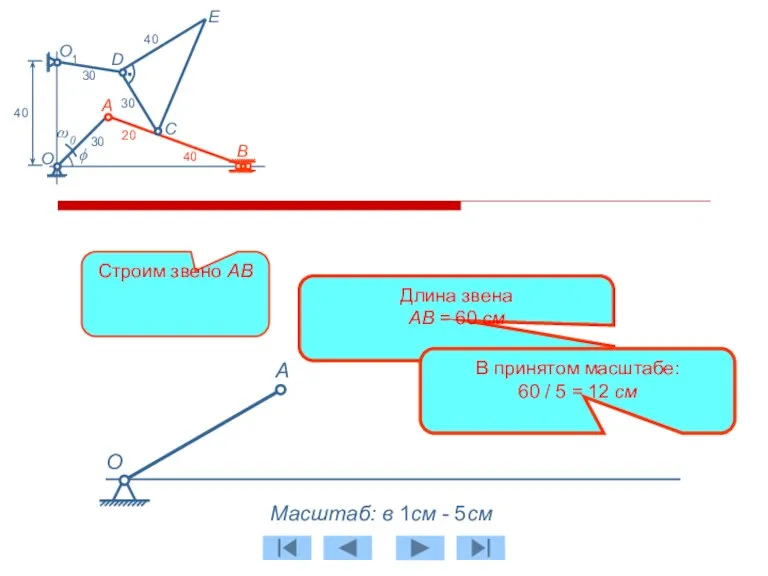
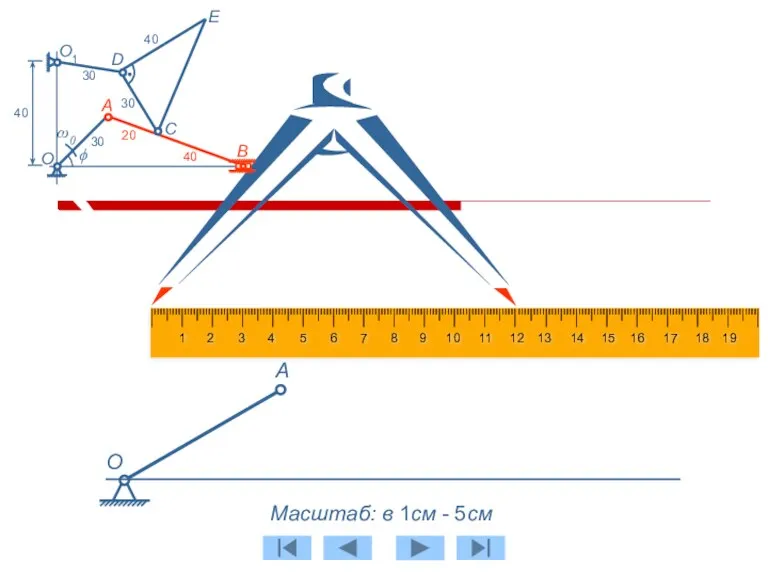
Строим звено АВ
Длина звена
АВ = 60
B
О
C
ϕ
ω0
D
А
E
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
А
Строим звено АВ
Длина звена
АВ = 60
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см

E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см

E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
Построим точку С
Расстояние
АС = 20 см
В
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
Построим точку С
Расстояние
АС = 20 см
В
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
Построим точку О1
Расстояние
ОО1 = 40 см
В
E
А
B
О
C
ϕ
ω0
D
А
О1
30
30
30
40
20
40
40
Масштаб: в 1см - 5см
Построим точку О1
Расстояние
ОО1 = 40 см
В
30
D
30
E
А
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
Масштаб: в 1см - 5см
О1
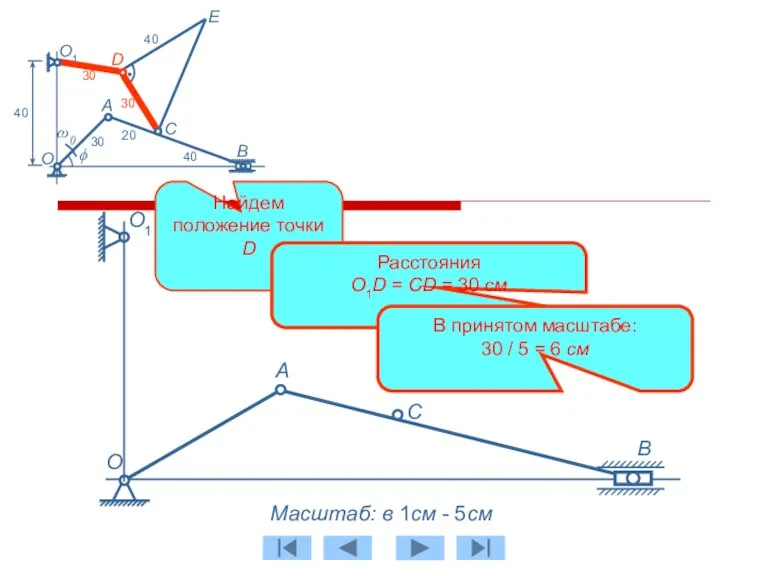
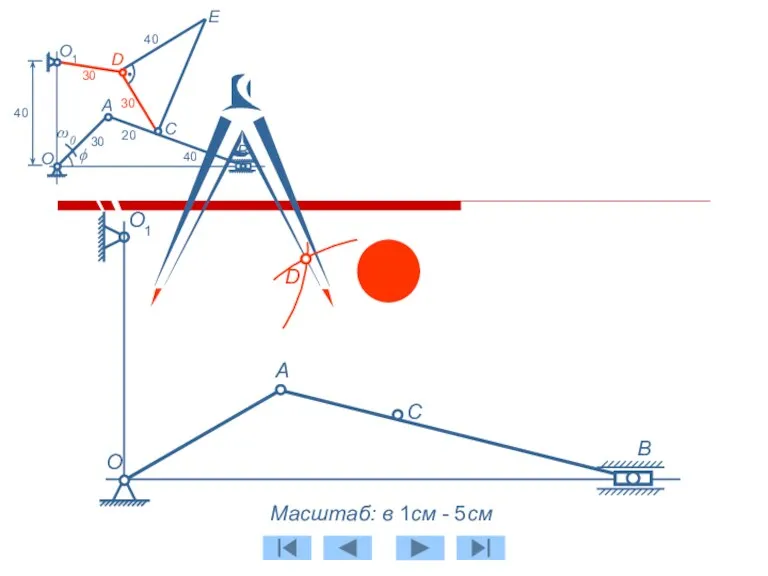
Найдем положение точки D
Расстояния
О1D = CD
30
D
30
E
А
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
Масштаб: в 1см - 5см
О1
Найдем положение точки D
Расстояния
О1D = CD

А
Масштаб: в 1см - 5см
О1
А
Масштаб: в 1см - 5см
О1
А
Масштаб: в 1см - 5см
О1
А
Масштаб: в 1см - 5см
О1
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
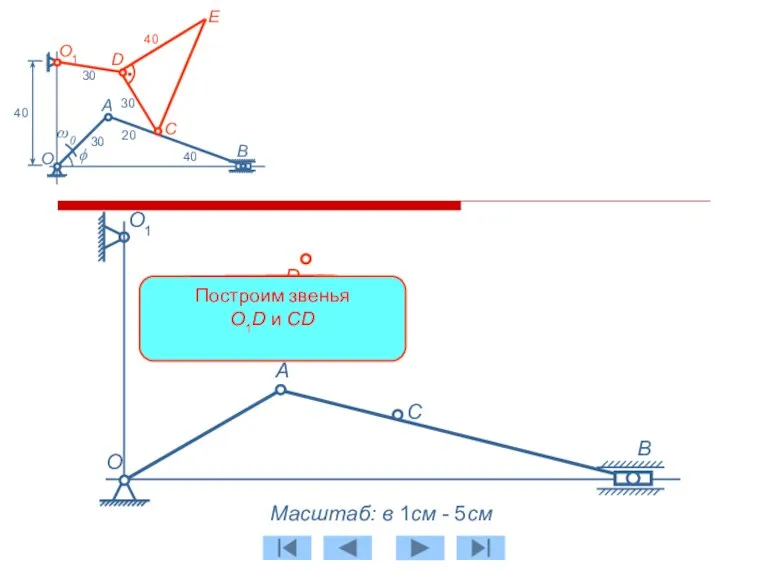
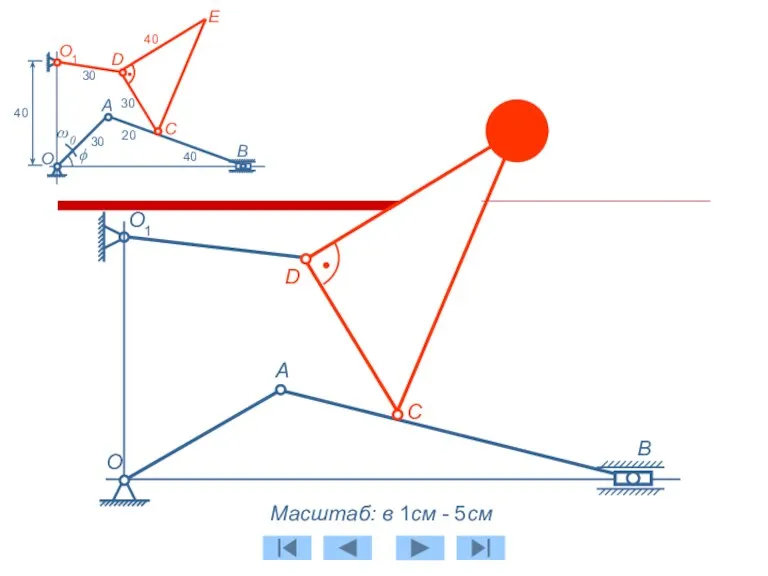
Построим звенья
О1D и CD
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
Построим звенья
О1D и CD
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
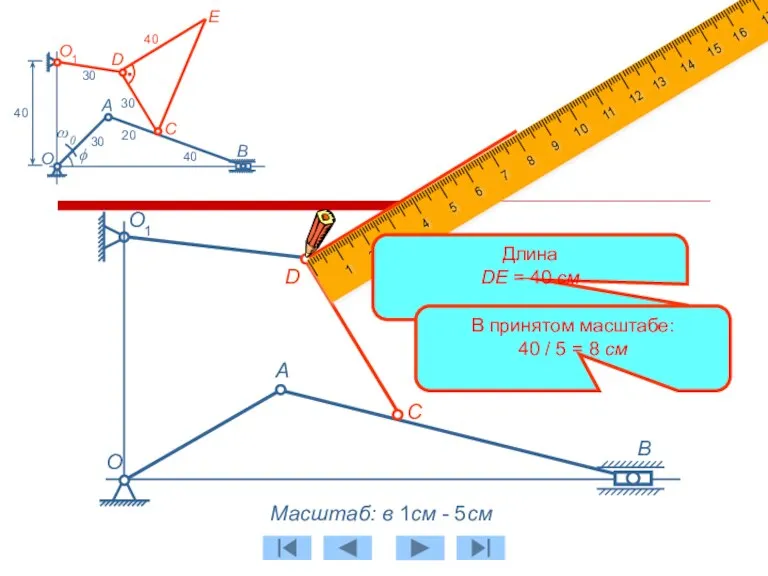
Длина
DE = 40 см
В принятом масштабе:
40
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
Длина
DE = 40 см
В принятом масштабе:
40
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
E
А
Масштаб: в 1см - 5см
О1
30
D
30
E
B
О
C
ϕ
ω0
А
О1
30
40
20
40
40
E
А
Масштаб: в 1см - 5см
О1
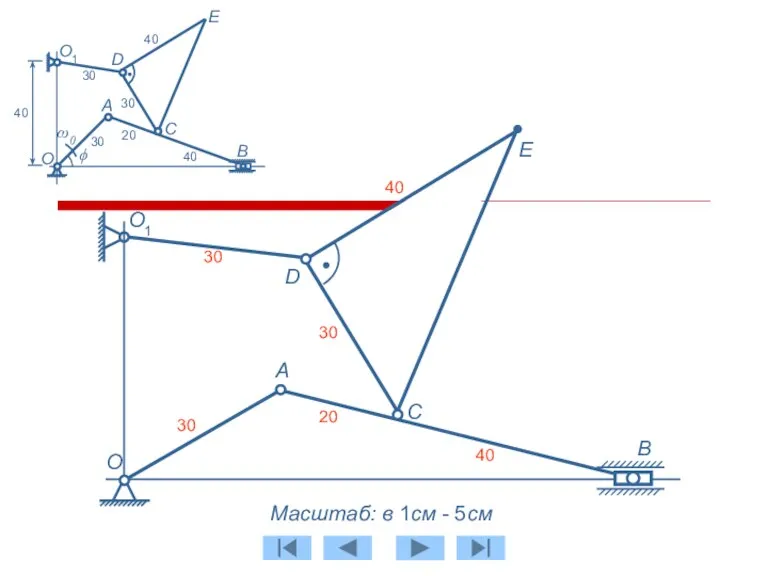
E
30
20
40
30
40
30
А
Масштаб: в 1см - 5см
О1
E
30
20
40
30
40
30

Тема 4.
4.3. Графический метод кинематического анализа
4.3.1. Построение кинематических диаграмм
Тема 4.
4.3. Графический метод кинематического анализа
4.3.1. Построение кинематических диаграмм

Тема 4.
Порядок построения совмещенных планов механизма.
1. Задаться масштабным коэффициентом длин
Тема 4.
Порядок построения совмещенных планов механизма.
1. Задаться масштабным коэффициентом длин
Тема 4.
Рассмотрим пример построения совмещенных планов положений механизма.
Тема 4.
Рассмотрим пример построения совмещенных планов положений механизма.
Тема 4.
лекция № 3
Тема 4.
лекция № 3
Тема 4.
3. Задаем начальное положение механизма, соответствующее одному из крайних
Тема 4.
3. Задаем начальное положение механизма, соответствующее одному из крайних
 Презентация к уроку Сила упругости 7 класс
Презентация к уроку Сила упругости 7 класс Давление в жидкостях и газах. Закон Паскаля (7 класс)
Давление в жидкостях и газах. Закон Паскаля (7 класс) Основы сопротивления материалов и физики прочности с использованием информационных технологий
Основы сопротивления материалов и физики прочности с использованием информационных технологий Квантовые свойства света. Фотоэффект. Лазеры. Лекция 22
Квантовые свойства света. Фотоэффект. Лазеры. Лекция 22 Нанотехнологии и физика
Нанотехнологии и физика Применение аккумуляторов
Применение аккумуляторов Влияние жидких грузов на остойчивость судна
Влияние жидких грузов на остойчивость судна Презентация к уроку в 9 классе на тему: Реактивное движение
Презентация к уроку в 9 классе на тему: Реактивное движение Основы кинематики
Основы кинематики Силовая передача боевой машины пехоты БМП-2. Тема 10
Силовая передача боевой машины пехоты БМП-2. Тема 10 Цифровые ключи на биполярных транзисторах. Схемотехника, принципы работы, параметры и характеристики
Цифровые ключи на биполярных транзисторах. Схемотехника, принципы работы, параметры и характеристики Мореходные и эксплуатационные качества судна
Мореходные и эксплуатационные качества судна расчет сопротивления проводника 8 класс
расчет сопротивления проводника 8 класс Презентация Строение солнечной системы
Презентация Строение солнечной системы Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. (Лекция 3)
Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. (Лекция 3) Природа света. Линзы
Природа света. Линзы Организация рабочего места слесаря. Тема 1.2
Организация рабочего места слесаря. Тема 1.2 Резонанс напряжений в электрических цепях
Резонанс напряжений в электрических цепях Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь
Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь Урок по физике Реактивное движение
Урок по физике Реактивное движение Электрический ток в вакууме
Электрический ток в вакууме Устойчивость элементов конструкций
Устойчивость элементов конструкций Изопроцессы
Изопроцессы Второй закон Ньютона. Масса
Второй закон Ньютона. Масса Реальные газы и пары. Общие свойства реальных газов
Реальные газы и пары. Общие свойства реальных газов Проводниковые материалы
Проводниковые материалы Жарықты мәжбүрлі сәулелену арқылы күшейту
Жарықты мәжбүрлі сәулелену арқылы күшейту Механика жидкости и газа
Механика жидкости и газа