- Траекторные измерения

Содержание
- 2. 1 Фотограмметрия 2 Оптические системы 3 Комплексная обработка информации
- 3. Погрешности БИНС Погрешности СНС Погрешности БИНС и СНС
- 4. Модель погрешности скорости ИНС ΔV(t) = C (t – tk) + D + ξ(t) Метод наименьших
- 5. Сравнение КОИ и данных дифференциального режима СНС Эффективность КОИНС Преимущества КОИ Повышение достоверности данных Получение траекторных
- 6. Фильтр Калмана 1 Случайные величины. Множество значений случайной величины. 2 Плотность вероятности ρ(x) случайной величины X.
- 7. Задача Для каждого момента времени tk определить координату x. Закон изменения координаты выглядит так: , где
- 8. Предположения 1 uk – известная величина, которая контролирует эволюцию системы. Ошибка модели ξk и ошибка наблюдения
- 9. Алгоритм Калмана Рассуждаем по индукции. Пусть на k-ом уже найдены отфильтрованное значение , которое хорошо приближает
- 10. Ошибку можно представить в виде Доказательство Выбираем критерий оптимальности Отсюда Приравниваем к нулю производную по K.
- 11. Соберем все формулы вместе.
- 12. Программный комплекс оптимальной обработки «Эталон» Направления применения алгоритмов КОИ Обеспечение эталонных траекторных измерений при летных испытаниях
- 13. Семейство программных комплексов «Эталон» ПК разработки АО «ЛИИ им. М.М. Громова» ПМО обработки и анализа материалов
- 14. Схема организации КОИ ИНС и РНС в бортовом и наземном вычислителях
- 15. Вектор состояния модели погрешностей БИНС ΔХ Тмод (17×1) Оценка вектора состояния ИНС и БИНС в ПК
- 16. Модель погрешностей БИНС
- 17. Здесь: R1, R2 – радиусы кривизны сечений земного эллипсоида по осям расчетной гироплатформы: R1=a/(1-0,5℮2sin2φ+℮2cos2φcos 2ε-H/a) R2=a/(1-0,5℮2sin2
- 19. Скачать презентацию

1 Фотограмметрия
2 Оптические системы
3 Комплексная обработка информации
1 Фотограмметрия
2 Оптические системы
3 Комплексная обработка информации
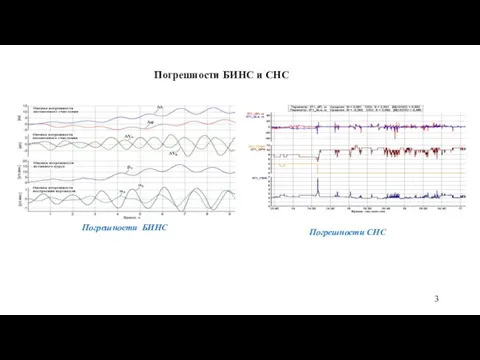
Погрешности БИНС
Погрешности СНС
Погрешности БИНС и СНС
Погрешности БИНС
Погрешности СНС
Погрешности БИНС и СНС
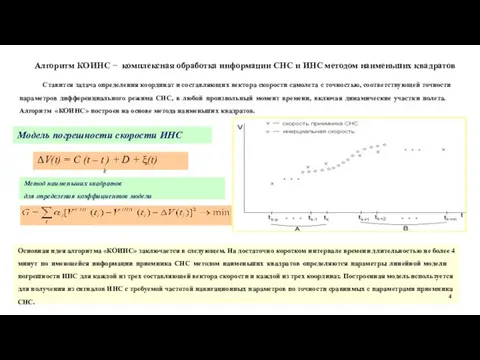
Модель погрешности скорости ИНС
ΔV(t) = C (t – tk) + D
Модель погрешности скорости ИНС
ΔV(t) = C (t – tk) + D
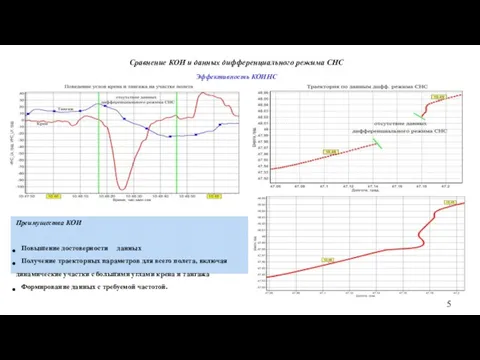
Сравнение КОИ и данных дифференциального режима СНС
Эффективность КОИНС
Преимущества КОИ
Сравнение КОИ и данных дифференциального режима СНС
Эффективность КОИНС
Преимущества КОИ
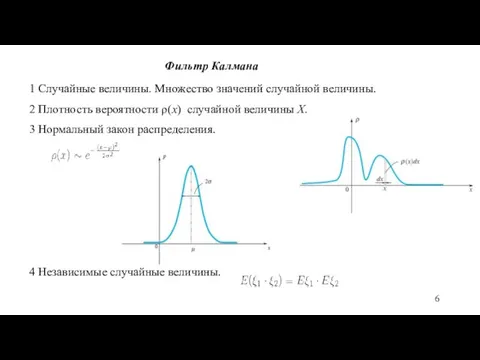
Фильтр Калмана
1 Случайные величины. Множество значений случайной величины.
2 Плотность вероятности
Фильтр Калмана
1 Случайные величины. Множество значений случайной величины.
2 Плотность вероятности

Задача Для каждого момента времени tk определить координату x.
Закон изменения координаты
Задача Для каждого момента времени tk определить координату x.
Закон изменения координаты

Предположения
1 uk – известная величина, которая контролирует эволюцию системы.
Ошибка
Предположения
1 uk – известная величина, которая контролирует эволюцию системы.
Ошибка

Алгоритм Калмана
Рассуждаем по индукции. Пусть на k-ом уже найдены отфильтрованное
Алгоритм Калмана
Рассуждаем по индукции. Пусть на k-ом уже найдены отфильтрованное

Ошибку можно представить в виде
Доказательство
Выбираем критерий оптимальности
Отсюда
Приравниваем к нулю производную
Ошибку можно представить в виде
Доказательство
Выбираем критерий оптимальности
Отсюда
Приравниваем к нулю производную

Соберем все формулы
вместе.
Соберем все формулы
вместе.
Программный комплекс оптимальной обработки «Эталон»
Направления применения алгоритмов КОИ
Обеспечение эталонных траекторных измерений
Программный комплекс оптимальной обработки «Эталон»
Направления применения алгоритмов КОИ
Обеспечение эталонных траекторных измерений
Семейство программных комплексов «Эталон»
ПК разработки АО «ЛИИ им. М.М. Громова»
ПМО
Семейство программных комплексов «Эталон»
ПК разработки АО «ЛИИ им. М.М. Громова»
ПМО
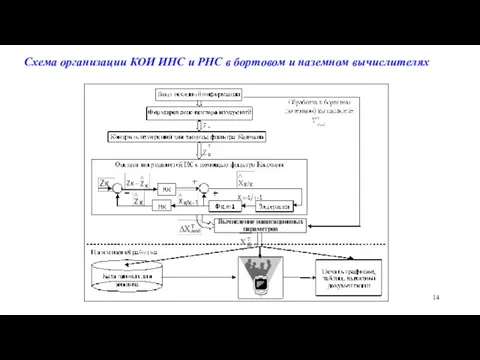
Схема организации КОИ ИНС и РНС в бортовом и наземном вычислителях
Схема организации КОИ ИНС и РНС в бортовом и наземном вычислителях
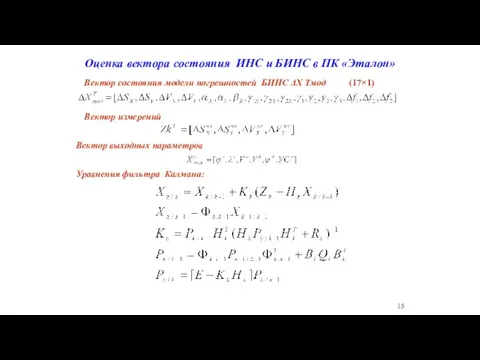
Вектор состояния модели погрешностей БИНС ΔХ Тмод (17×1)
Оценка вектора состояния
Вектор состояния модели погрешностей БИНС ΔХ Тмод (17×1)
Оценка вектора состояния

Модель погрешностей БИНС
Модель погрешностей БИНС
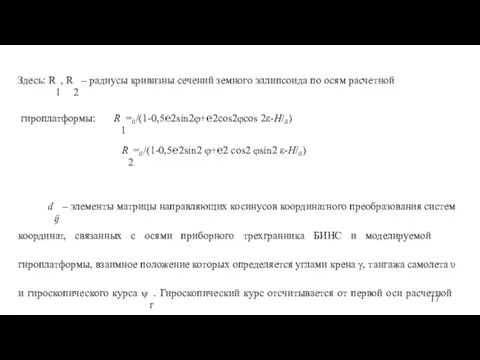
Здесь: R1, R2 – радиусы кривизны сечений земного эллипсоида по осям
Здесь: R1, R2 – радиусы кривизны сечений земного эллипсоида по осям
 Зрительная (подзорная) труба
Зрительная (подзорная) труба Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1)
Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1) Спектроскопия электронного парамагнитного резонанса
Спектроскопия электронного парамагнитного резонанса Приборы измерения мощности
Приборы измерения мощности Масса тела. Единицы массы
Масса тела. Единицы массы Теоретические основы надёжности технологических систем в технике
Теоретические основы надёжности технологических систем в технике Юные знатоки физики
Юные знатоки физики ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)
ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2) Физика в белом халате
Физика в белом халате Микроскоптың шығу тарихы
Микроскоптың шығу тарихы Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание.
Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание. Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения
Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 1
Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 1 Физические поля и электромагнитные излучения
Физические поля и электромагнитные излучения Дипломный проект: Технологический процесс технического обслуживания и ремонта сцепления автомобиля
Дипломный проект: Технологический процесс технического обслуживания и ремонта сцепления автомобиля Магниторазведка. Магнетизм и магнетики
Магниторазведка. Магнетизм и магнетики Энергетические возможности ядерных реакторов различных типов
Энергетические возможности ядерных реакторов различных типов Ядерные реакции
Ядерные реакции Технология коллоидов и наносистем. Лекция 4. Физико-химические основы нуклеации и технологии формирования новой фазы
Технология коллоидов и наносистем. Лекция 4. Физико-химические основы нуклеации и технологии формирования новой фазы Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Карданный вал
Карданный вал Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода электрических зарядов
Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода электрических зарядов Силы в природе
Силы в природе открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Ядерна енергетика в Україні
Ядерна енергетика в Україні Презентация к уроку физики в 8 классе на тему: Кипение
Презентация к уроку физики в 8 классе на тему: Кипение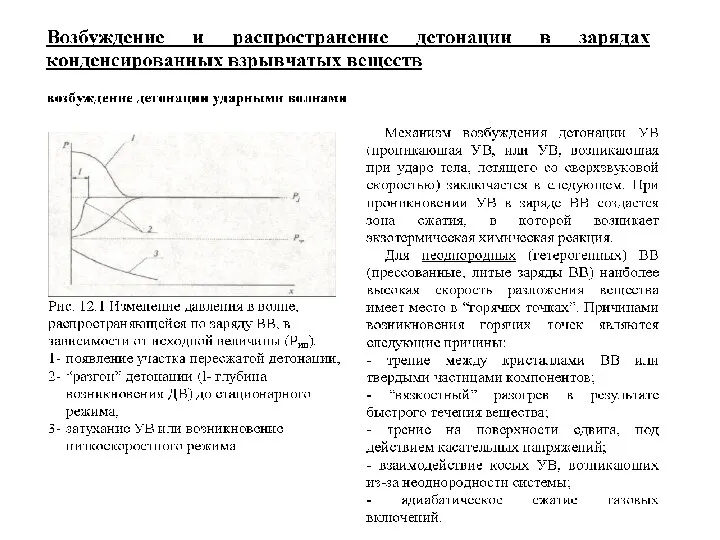 Возбуждение и распространение детонации конденсированных взрывчатых веществ
Возбуждение и распространение детонации конденсированных взрывчатых веществ ÐекÑÐ¸Ñ 3. ÐÐТÐÐÐ
ÐекÑÐ¸Ñ 3. ÐÐТÐÐÐ