- Ускорение материальной точки

Содержание
- 2. Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим в (2.3.1) формулу для скорости получим
- 3. Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено по касательной к траектории и характеризует
- 4. Для выяснения смысла нормального ускорения рассмотрим плоское движение частицы вдоль траектории FABG. Малый участок траектории в
- 5. При Δt → 0 , Δα → 0 , а β = π/2+Δα/2 → π/2 Поэтому
- 6. С учетом полученных выражений для тангенциального и нормального ускорений, вектор полного ускорения принимает окончательный вид (2.3.5)
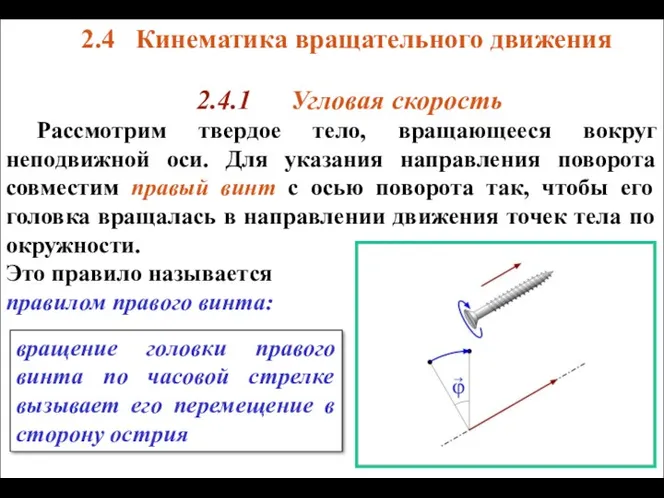
- 7. 2.4 Кинематика вращательного движения 2.4.1 Угловая скорость Рассмотрим твердое тело, вращающееся вокруг неподвижной оси. Для указания
- 8. Пусть некоторая точка тела движется по окружности радиуса R и за время Δ t поворачивается на
- 9. Угловой скоростью называется величина, равная первой производной угла поворота по времени (2.4.1) Угловая скорость направлена вдоль
- 10. Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать периодом и частотой вращения. Период вращения
- 11. Найдем связь между угловой и линейной скоростями. Пусть за малый промежуток времени тело повернулось на угол
- 12. Чтобы найти связь между направлениями векторов и , вспомним свойства векторного произведения. Векторным произведением векторов и
- 13. Из определения векторного произведения следует, что направление вектора совпадает с направлением вектора скорости , а модуль
- 14. 2.4.2 Угловое ускорение При неравномерном вращении вектор угловой скорости может менять как свою величину, так и
- 15. Запишем полное ускорение точки вращающегося тела в виде (2.3.2), как сумму нормального и тангенциального ускорений Найдем
- 16. 3. Динамика материальной точки В основе классической механики лежат три закона динамики, сформулированные Ньютоном в 1687
- 17. Представление о существовании инерциальных систем ввел Галилей. Казалось бы, опыт противоречит этому представлению и говорит об
- 18. Строго говоря, тел не подверженных влиянию других тел, в природе в принципе не существует, хотя бы
- 19. Итак, Галилей пришел к выводу, что если на тело не действует никакая сила, то оно движется
- 20. Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и формулируется следующим образом: всякое тело
- 21. Опыт показывает, что одно и тоже воздействие разным телам сообщает разные ускорения, следовательно, инертность разных тел
- 22. Для количественного описания внешних воздействий вводится понятие силы. Сила – это векторная величина, выступающая мерой механического
- 23. Второй закон Ньютона, также как и первый закон, справедлив только в инерциальных системах отсчета. Из (3.2.1)
- 24. Таким образом (3.2.2) Отсюда следует другая формулировка 2-го закона Ньютона: сила равна cкорости изменения импульса тела.
- 25. Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе, которая массе 1 кг сообщает
- 26. 3.3 Третий закон Ньютона Всякое действие тел друг на друга носит характер взаимодействия: если одно тело
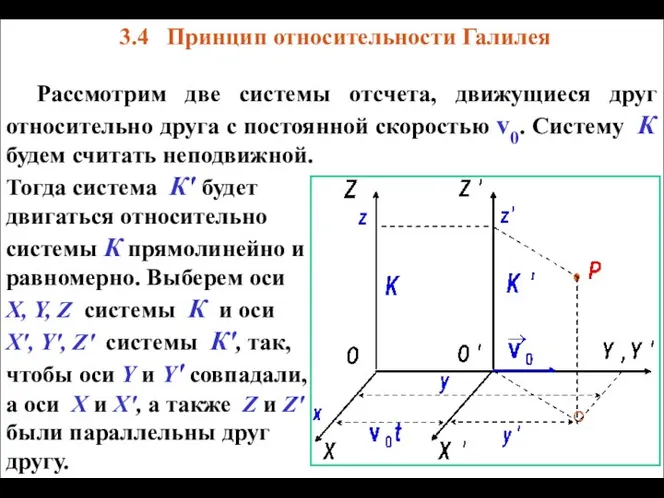
- 27. 3.4 Принцип относительности Галилея Рассмотрим две системы отсчета, движущиеся друг относительно друга с постоянной скоростью v0.
- 28. Найдем связь между координатами х, у, z некоторой точки Р в системе К и координатами х',
- 29. Продифференцируем по времени обе части (3.4.1). В результате находим связь между скоростями точки Р в системах
- 30. Покажем, что из преобразований Галилея вытекает прежнее утверждение о том, что любая система отсчета, движущаяся относительно
- 31. Умножая (3.4.3) на массу тела, получим равенство сил Таким образом, силы, действующие на частицу во всех
- 32. 3.5 Границы применимости классической механики В течение 200 лет после создания механика Ньютона считалась абсолютно строгой
- 33. 1) Вопреки предположению Ньютона, массы тел оказываются не постоянными, а зависящими от скорости их движения v.
- 34. 2) В механике Ньютона считается, что силы, с которыми действуют тела друг на друга передаются мгновенно.
- 35. Пусть первоначально частицы покоились. Тогда силы притяжения F12 и F21, действующие на них будут равны по
- 37. Скачать презентацию
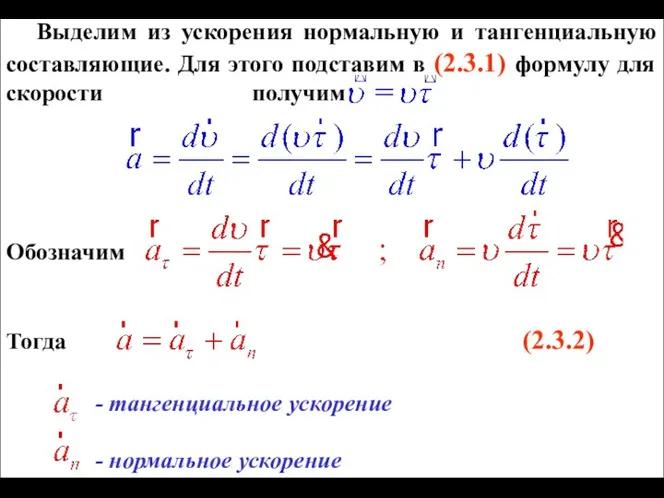
Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим
Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим
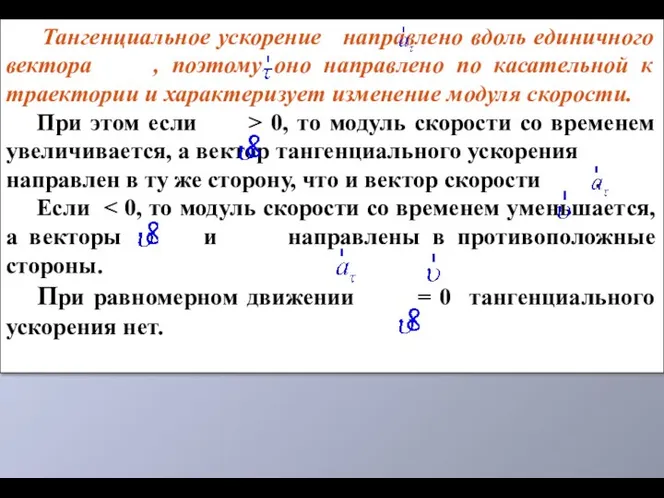
Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено
Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено
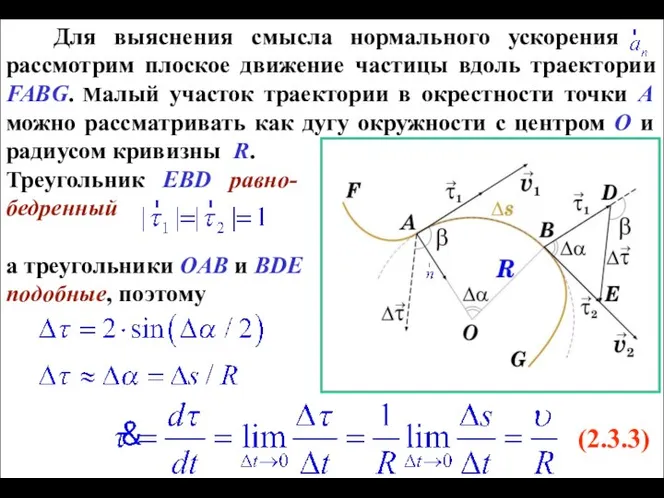
Для выяснения смысла нормального ускорения
рассмотрим плоское движение частицы вдоль траектории
Для выяснения смысла нормального ускорения
рассмотрим плоское движение частицы вдоль траектории
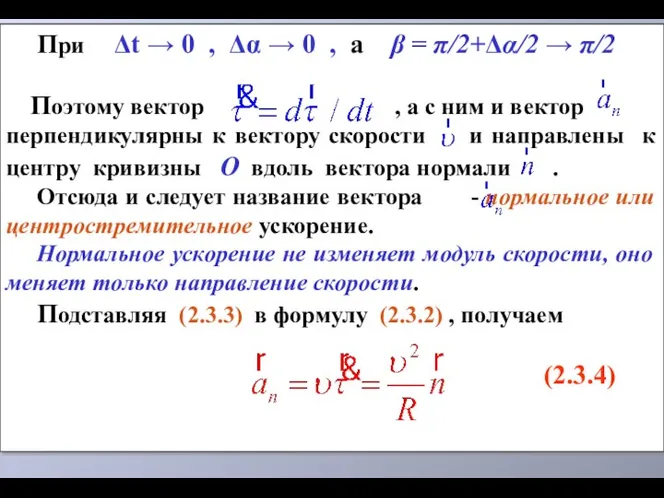
При Δt → 0 , Δα → 0 , а
При Δt → 0 , Δα → 0 , а
С учетом полученных выражений для тангенциального и нормального ускорений, вектор
С учетом полученных выражений для тангенциального и нормального ускорений, вектор
2.4 Кинематика вращательного движения
2.4.1 Угловая скорость
Рассмотрим твердое тело, вращающееся вокруг
2.4 Кинематика вращательного движения
2.4.1 Угловая скорость
Рассмотрим твердое тело, вращающееся вокруг
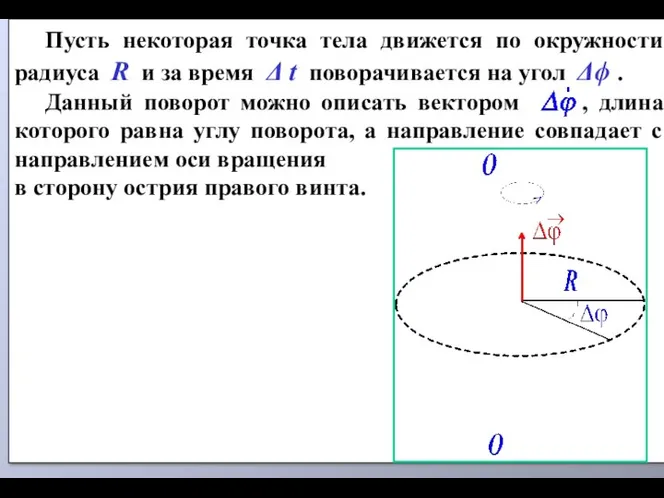
Пусть некоторая точка тела движется по окружности радиуса R и
Пусть некоторая точка тела движется по окружности радиуса R и
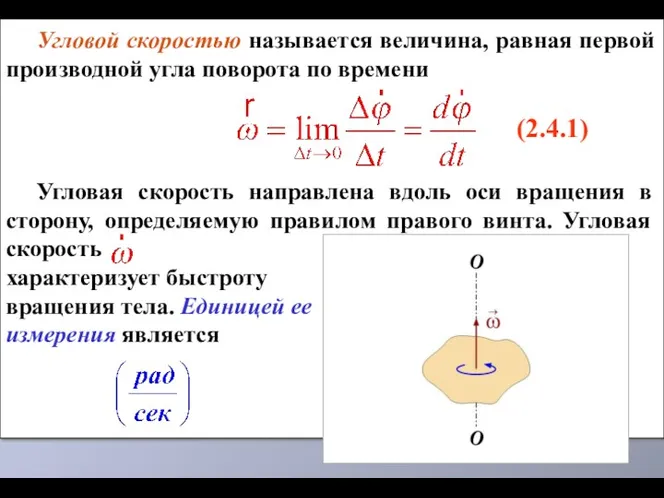
Угловой скоростью называется величина, равная первой производной угла поворота по
Угловой скоростью называется величина, равная первой производной угла поворота по
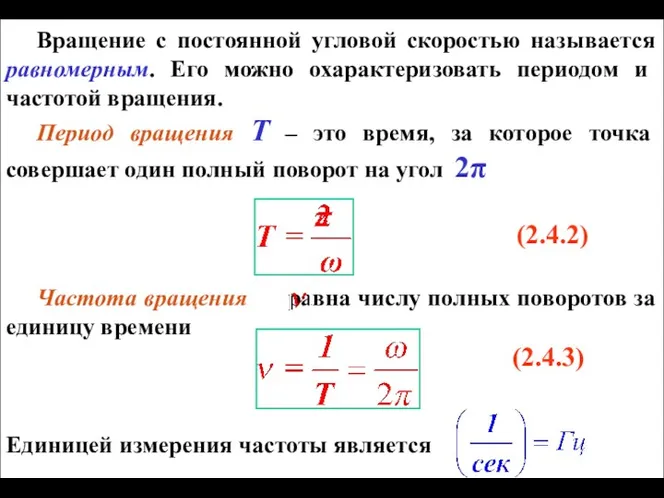
Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать
Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать
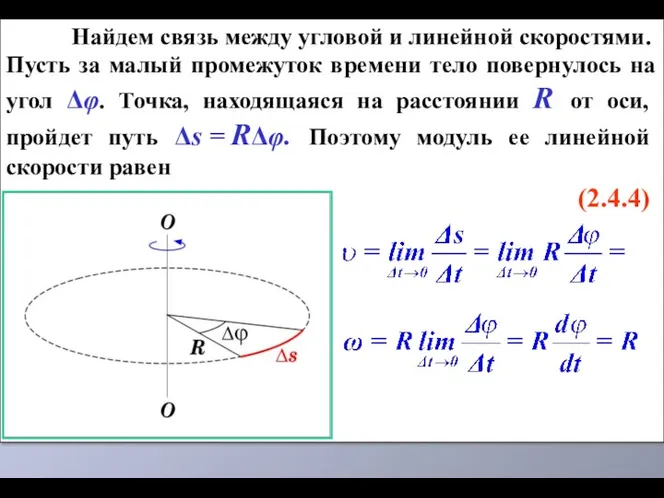
Найдем связь между угловой и линейной скоростями.
Пусть за малый промежуток
Найдем связь между угловой и линейной скоростями.
Пусть за малый промежуток
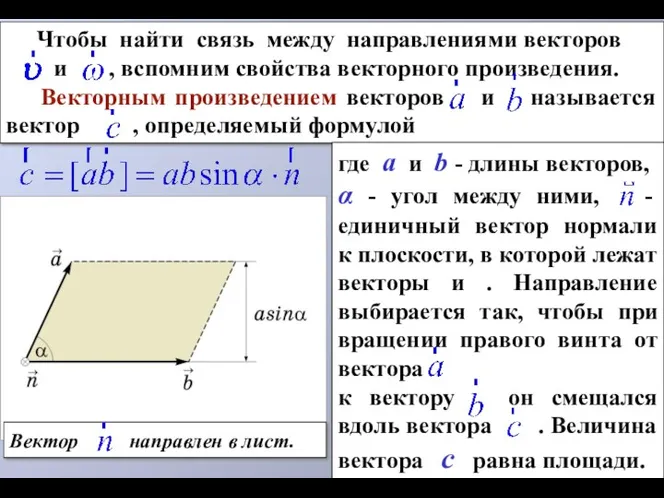
Чтобы найти связь между направлениями векторов
и , вспомним свойства векторного
Чтобы найти связь между направлениями векторов
и , вспомним свойства векторного
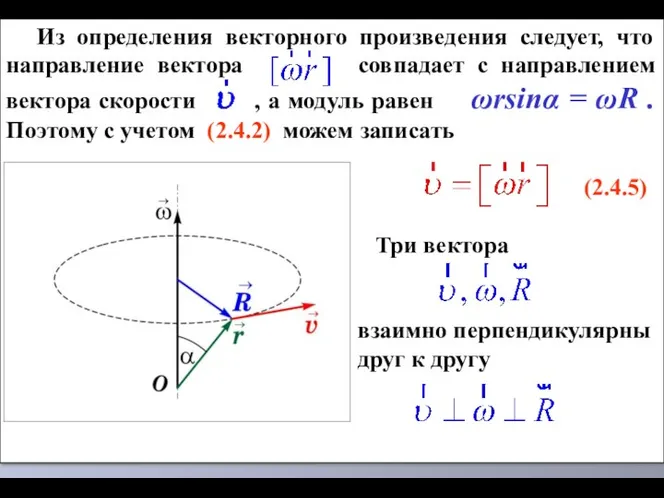
Из определения векторного произведения следует, что направление вектора совпадает с направлением
Из определения векторного произведения следует, что направление вектора совпадает с направлением
2.4.2 Угловое ускорение
При неравномерном вращении вектор угловой скорости может
2.4.2 Угловое ускорение
При неравномерном вращении вектор угловой скорости может
Запишем полное ускорение точки вращающегося тела в виде (2.3.2), как
Запишем полное ускорение точки вращающегося тела в виде (2.3.2), как
3. Динамика материальной точки
В основе классической механики лежат три закона
3. Динамика материальной точки
В основе классической механики лежат три закона
Представление о существовании инерциальных систем ввел Галилей.
Казалось бы, опыт противоречит
Представление о существовании инерциальных систем ввел Галилей.
Казалось бы, опыт противоречит
Строго говоря, тел не подверженных влиянию других тел, в природе в
Строго говоря, тел не подверженных влиянию других тел, в природе в
Итак, Галилей пришел к выводу, что если на тело не действует
Итак, Галилей пришел к выводу, что если на тело не действует
Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и
Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и
Опыт показывает, что одно и тоже воздействие разным телам сообщает разные
Опыт показывает, что одно и тоже воздействие разным телам сообщает разные
Для количественного описания внешних воздействий вводится понятие силы.
Сила – это векторная
Для количественного описания внешних воздействий вводится понятие силы.
Сила – это векторная
Второй закон Ньютона, также как и первый закон, справедлив только в
Второй закон Ньютона, также как и первый закон, справедлив только в
Таким образом (3.2.2)
Отсюда следует другая формулировка 2-го закона Ньютона: сила равна
Отсюда следует другая формулировка 2-го закона Ньютона: сила равна
Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе,
Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе,
3.3 Третий закон Ньютона
Всякое действие тел друг на друга носит
3.3 Третий закон Ньютона
Всякое действие тел друг на друга носит
3.4 Принцип относительности Галилея
Рассмотрим две системы отсчета, движущиеся друг относительно
3.4 Принцип относительности Галилея
Рассмотрим две системы отсчета, движущиеся друг относительно
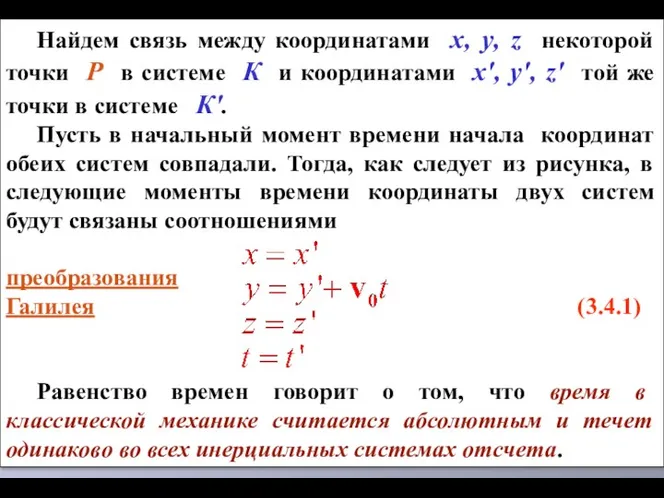
Найдем связь между координатами х, у, z некоторой точки Р в
Найдем связь между координатами х, у, z некоторой точки Р в
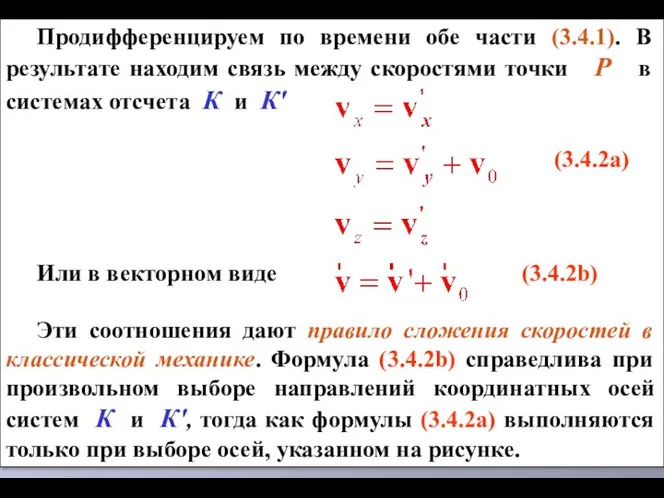
Продифференцируем по времени обе части (3.4.1). В результате находим связь между
Продифференцируем по времени обе части (3.4.1). В результате находим связь между
Покажем, что из преобразований Галилея вытекает прежнее утверждение о том, что
Покажем, что из преобразований Галилея вытекает прежнее утверждение о том, что
Умножая (3.4.3) на массу тела, получим равенство сил
Таким образом, силы, действующие
Умножая (3.4.3) на массу тела, получим равенство сил
Таким образом, силы, действующие
3.5 Границы применимости классической механики
В течение 200 лет после создания
3.5 Границы применимости классической механики
В течение 200 лет после создания
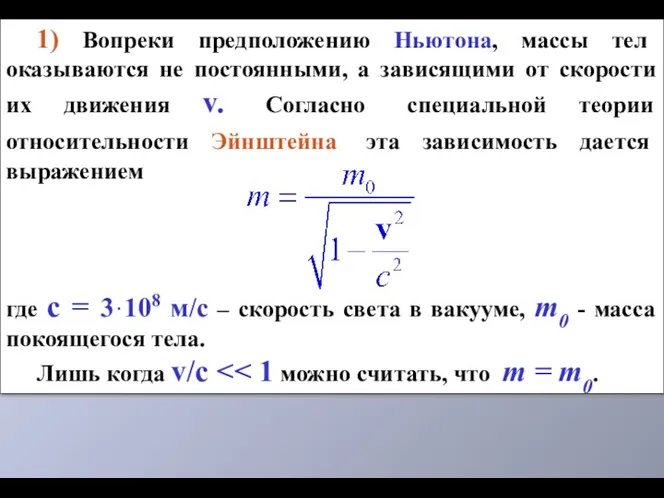
1) Вопреки предположению Ньютона, массы тел оказываются не постоянными, а зависящими
1) Вопреки предположению Ньютона, массы тел оказываются не постоянными, а зависящими
2) В механике Ньютона считается, что силы, с которыми действуют
2) В механике Ньютона считается, что силы, с которыми действуют
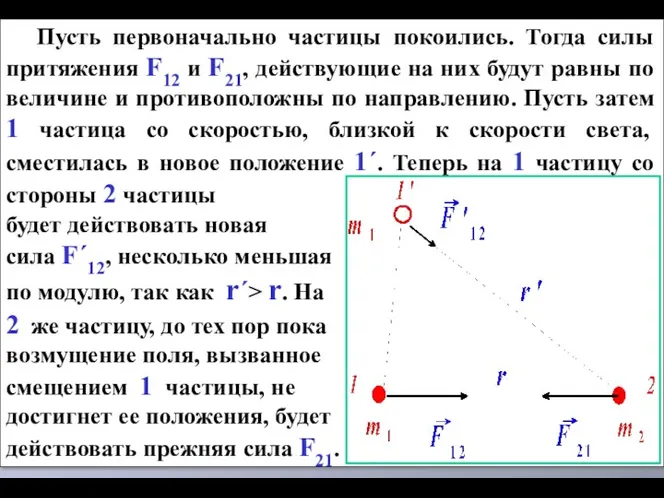
Пусть первоначально частицы покоились. Тогда силы притяжения F12 и F21, действующие
Пусть первоначально частицы покоились. Тогда силы притяжения F12 и F21, действующие
 Презентация к уроку Сила упругости 7 класс
Презентация к уроку Сила упругости 7 класс Давление в жидкостях и газах. Закон Паскаля (7 класс)
Давление в жидкостях и газах. Закон Паскаля (7 класс) Основы сопротивления материалов и физики прочности с использованием информационных технологий
Основы сопротивления материалов и физики прочности с использованием информационных технологий Квантовые свойства света. Фотоэффект. Лазеры. Лекция 22
Квантовые свойства света. Фотоэффект. Лазеры. Лекция 22 Нанотехнологии и физика
Нанотехнологии и физика Применение аккумуляторов
Применение аккумуляторов Влияние жидких грузов на остойчивость судна
Влияние жидких грузов на остойчивость судна Презентация к уроку в 9 классе на тему: Реактивное движение
Презентация к уроку в 9 классе на тему: Реактивное движение Основы кинематики
Основы кинематики Силовая передача боевой машины пехоты БМП-2. Тема 10
Силовая передача боевой машины пехоты БМП-2. Тема 10 Цифровые ключи на биполярных транзисторах. Схемотехника, принципы работы, параметры и характеристики
Цифровые ключи на биполярных транзисторах. Схемотехника, принципы работы, параметры и характеристики Мореходные и эксплуатационные качества судна
Мореходные и эксплуатационные качества судна расчет сопротивления проводника 8 класс
расчет сопротивления проводника 8 класс Презентация Строение солнечной системы
Презентация Строение солнечной системы Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. (Лекция 3)
Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. (Лекция 3) Природа света. Линзы
Природа света. Линзы Организация рабочего места слесаря. Тема 1.2
Организация рабочего места слесаря. Тема 1.2 Резонанс напряжений в электрических цепях
Резонанс напряжений в электрических цепях Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь
Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь Урок по физике Реактивное движение
Урок по физике Реактивное движение Электрический ток в вакууме
Электрический ток в вакууме Устойчивость элементов конструкций
Устойчивость элементов конструкций Изопроцессы
Изопроцессы Второй закон Ньютона. Масса
Второй закон Ньютона. Масса Реальные газы и пары. Общие свойства реальных газов
Реальные газы и пары. Общие свойства реальных газов Проводниковые материалы
Проводниковые материалы Жарықты мәжбүрлі сәулелену арқылы күшейту
Жарықты мәжбүрлі сәулелену арқылы күшейту Механика жидкости и газа
Механика жидкости и газа