Введение в динамику. Законы и аксиомы динамики материальной точки. Основное уравнение динамики презентация
- Введение в динамику. Законы и аксиомы динамики материальной точки. Основное уравнение динамики

Содержание
- 2. Динамика – раздел теоретической механики, изучающий механическое движение с самой общей точки зрения. Движение рассматривается в
- 3. Дифференциальные уравнения движения материальной точки: - дифференциальное уравнение движения точки в векторном виде. - дифференциальные уравнения
- 4. Две основные задачи динамики: 1. Прямая задача: Задано движение (уравнения движения, траектория). Требуется определить силы, под
- 5. Пример 3: Груз весом G подвешен на тросе длиной l и движется по круговой траектории в
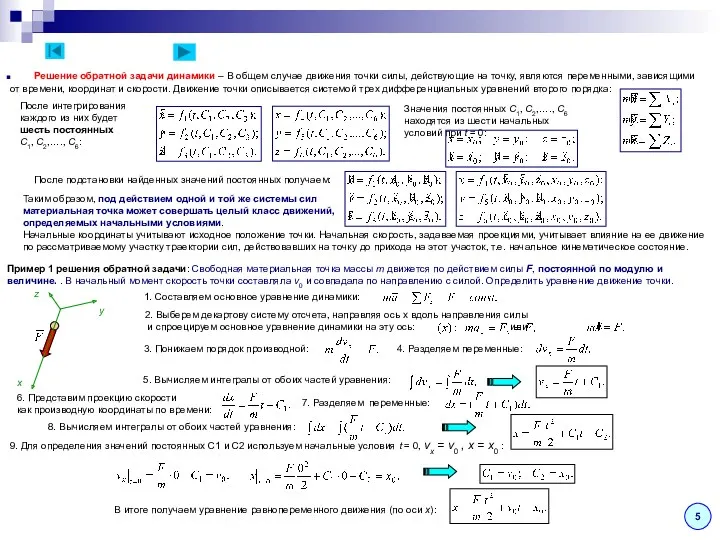
- 6. После подстановки найденных значений постоянных получаем: Таким образом, под действием одной и той же системы сил
- 7. Общие указания к решению прямой и обратной задачи. Порядок решения: 1. Составление дифференциального уравнения движения: 1.1.
- 8. Пример 2 решения обратной задачи: Сила зависит от времени. Груз весом P начинает двигаться по гладкой
- 10. Скачать презентацию
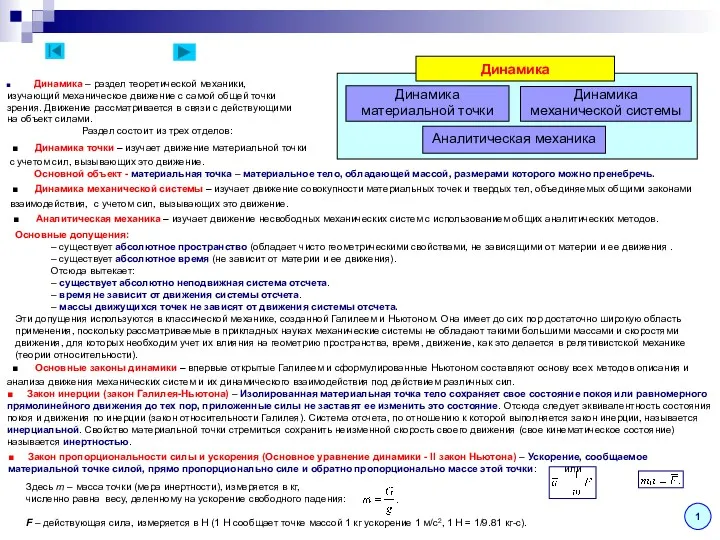
Динамика – раздел теоретической механики,
изучающий механическое движение с самой общей точки
зрения.
Динамика – раздел теоретической механики,
изучающий механическое движение с самой общей точки
зрения.
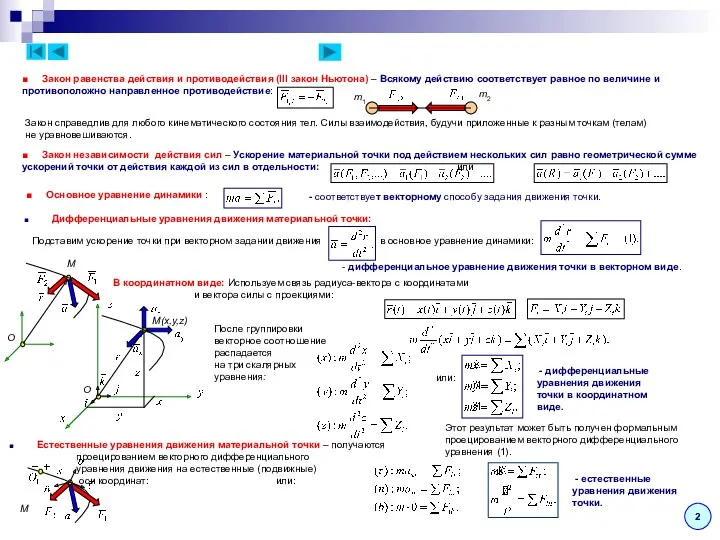
Дифференциальные уравнения движения материальной точки:
- дифференциальное уравнение движения точки в векторном
Дифференциальные уравнения движения материальной точки:
- дифференциальное уравнение движения точки в векторном
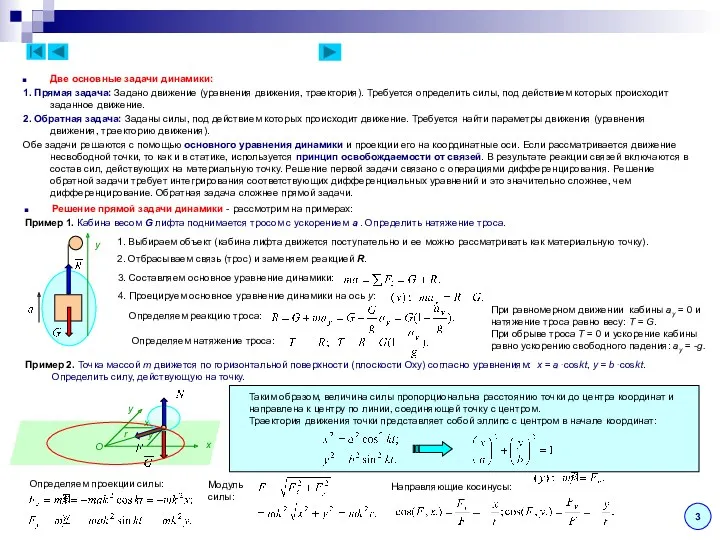
Две основные задачи динамики:
1. Прямая задача: Задано движение (уравнения движения, траектория).
Две основные задачи динамики:
1. Прямая задача: Задано движение (уравнения движения, траектория).
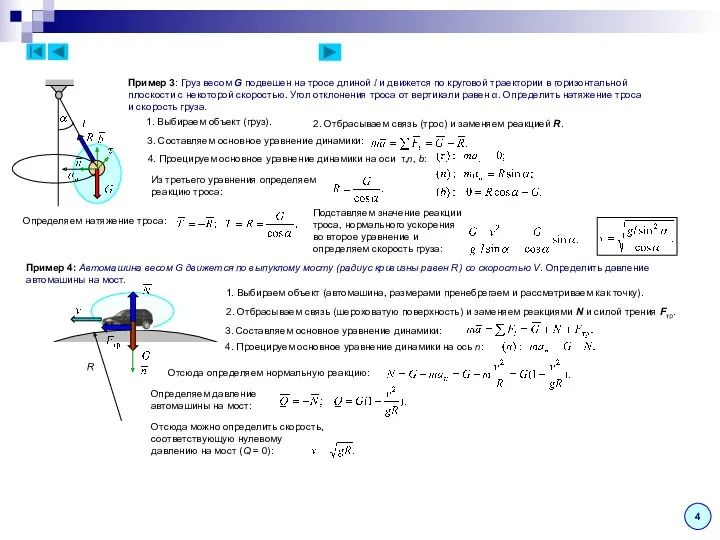
Пример 3: Груз весом G подвешен на тросе длиной l и
Пример 3: Груз весом G подвешен на тросе длиной l и
После подстановки найденных значений постоянных получаем:
Таким образом, под действием одной и
После подстановки найденных значений постоянных получаем:
Таким образом, под действием одной и
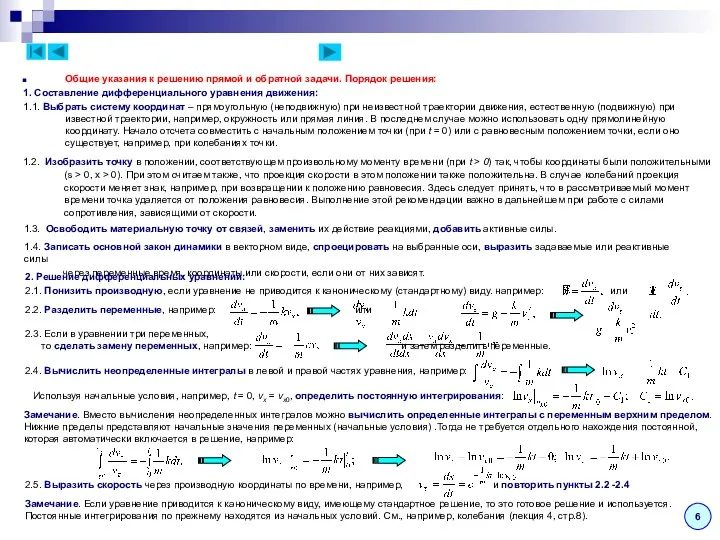
Общие указания к решению прямой и обратной задачи. Порядок решения:
1. Составление
Общие указания к решению прямой и обратной задачи. Порядок решения:
1. Составление
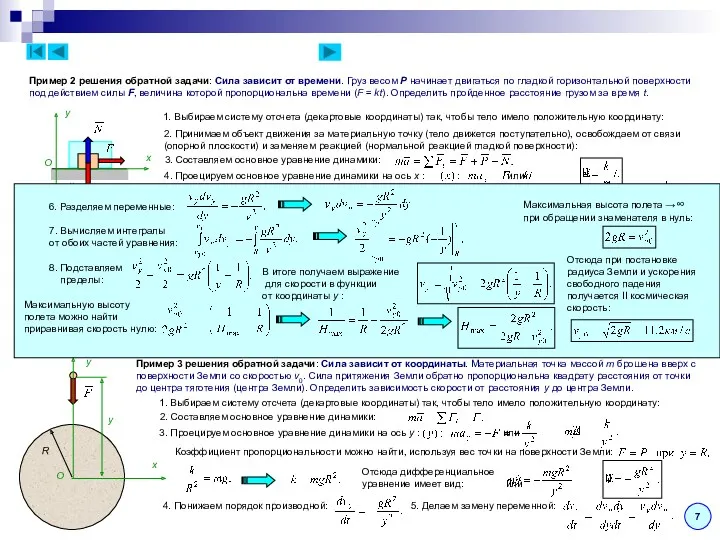
Пример 2 решения обратной задачи: Сила зависит от времени. Груз весом
Пример 2 решения обратной задачи: Сила зависит от времени. Груз весом
 Зрительная (подзорная) труба
Зрительная (подзорная) труба Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1)
Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1) Спектроскопия электронного парамагнитного резонанса
Спектроскопия электронного парамагнитного резонанса Приборы измерения мощности
Приборы измерения мощности Масса тела. Единицы массы
Масса тела. Единицы массы Теоретические основы надёжности технологических систем в технике
Теоретические основы надёжности технологических систем в технике Юные знатоки физики
Юные знатоки физики ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)
ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2) Физика в белом халате
Физика в белом халате Микроскоптың шығу тарихы
Микроскоптың шығу тарихы Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание.
Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание. Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения
Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 1
Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 1 Физические поля и электромагнитные излучения
Физические поля и электромагнитные излучения Дипломный проект: Технологический процесс технического обслуживания и ремонта сцепления автомобиля
Дипломный проект: Технологический процесс технического обслуживания и ремонта сцепления автомобиля Магниторазведка. Магнетизм и магнетики
Магниторазведка. Магнетизм и магнетики Энергетические возможности ядерных реакторов различных типов
Энергетические возможности ядерных реакторов различных типов Ядерные реакции
Ядерные реакции Технология коллоидов и наносистем. Лекция 4. Физико-химические основы нуклеации и технологии формирования новой фазы
Технология коллоидов и наносистем. Лекция 4. Физико-химические основы нуклеации и технологии формирования новой фазы Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Карданный вал
Карданный вал Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода электрических зарядов
Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода электрических зарядов Силы в природе
Силы в природе открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Ядерна енергетика в Україні
Ядерна енергетика в Україні Презентация к уроку физики в 8 классе на тему: Кипение
Презентация к уроку физики в 8 классе на тему: Кипение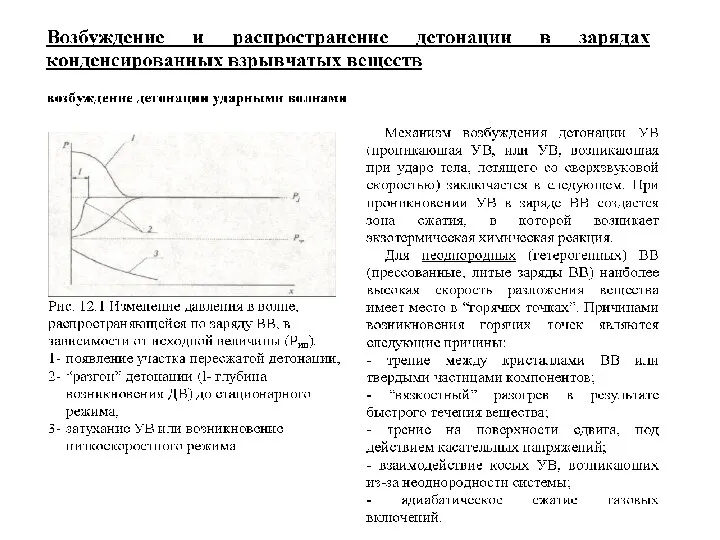 Возбуждение и распространение детонации конденсированных взрывчатых веществ
Возбуждение и распространение детонации конденсированных взрывчатых веществ ÐекÑÐ¸Ñ 3. ÐÐТÐÐÐ
ÐекÑÐ¸Ñ 3. ÐÐТÐÐÐ