- Захватные устройства

Содержание
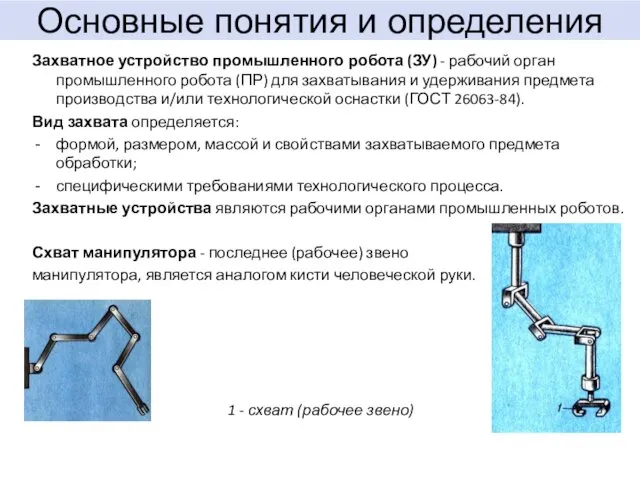
- 2. Основные понятия и определения Захватное устройство промышленного робота (ЗУ) - рабочий орган промышленного робота (ПР) для
- 3. Движения манипулятора
- 4. Совместные перемещения звеньев манипулятора Криволинейная пространственная траектория сложной формы, описываемая схватом
- 5. Требования к захватным устройствам К захватным устройствам ПР предъявляются требования общего характера и специальные, связанные с
- 6. Требования к захватным устройствам (продолжение) Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных
- 7. Структура захватных устройств Общая структура захватных устройств
- 8. Структура захватных устройств (продолжение) Основные элементы ЗУ: соединительные фланцы; силовые приводы или устройства преобразования энергии в
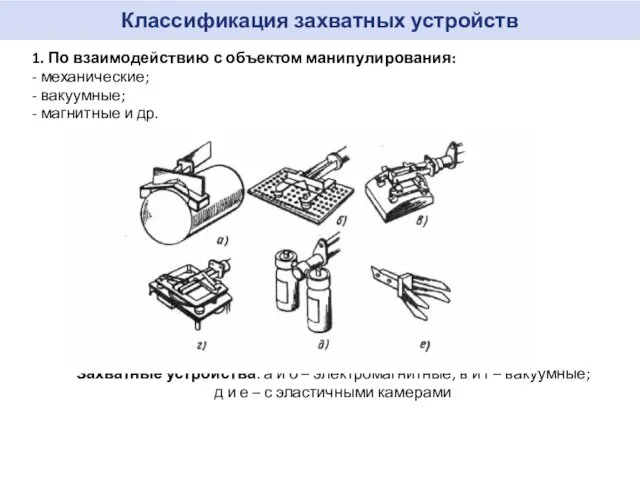
- 9. Классификация захватных устройств 1. По взаимодействию с объектом манипулирования: - механические; - вакуумные; - магнитные и
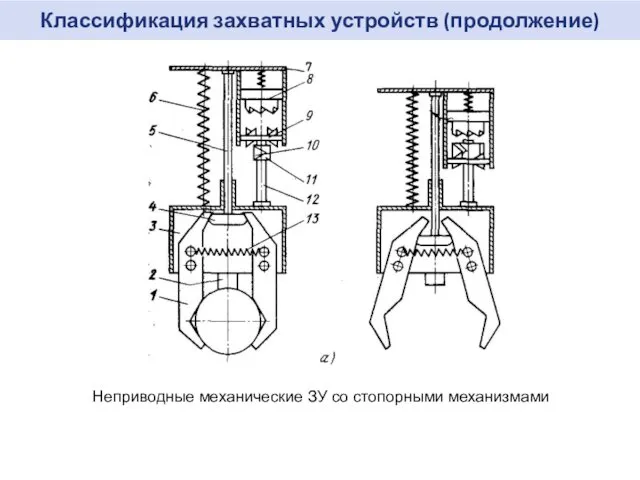
- 10. Классификация захватных устройств (продолжение) Неприводные механические ЗУ со стопорными механизмами
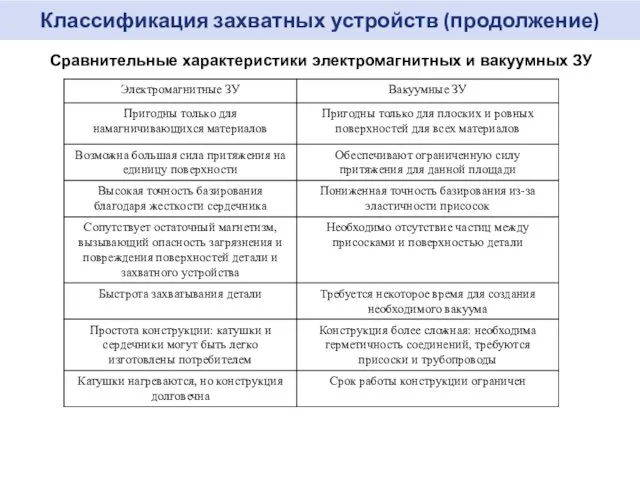
- 11. Классификация захватных устройств (продолжение) Сравнительные характеристики электромагнитных и вакуумных ЗУ
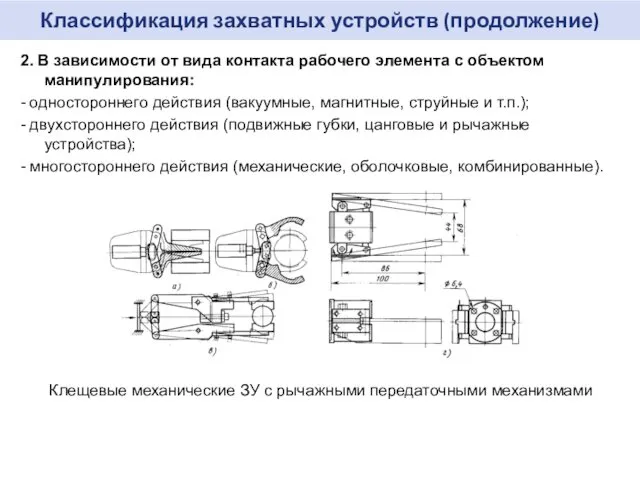
- 12. Классификация захватных устройств (продолжение) 2. В зависимости от вида контакта рабочего элемента с объектом манипулирования: -
- 13. Классификация захватных устройств (продолжение) 3. По способу ориентирования деталей: - центрирующие; - базирующие; - фиксирующие; -
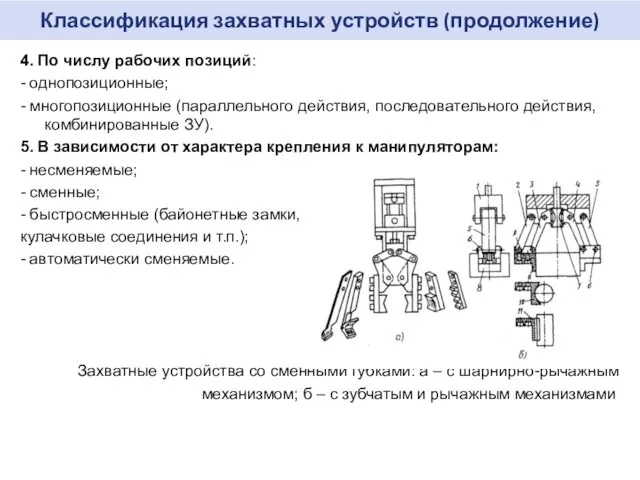
- 14. Классификация захватных устройств (продолжение) 4. По числу рабочих позиций: - однопозиционные; - многопозиционные (параллельного действия, последовательного
- 15. Классификация захватных устройств (продолжение) 6. По виду управления: - неуправляемые; - командные; - жесткопрограммируемые; - адаптивные.
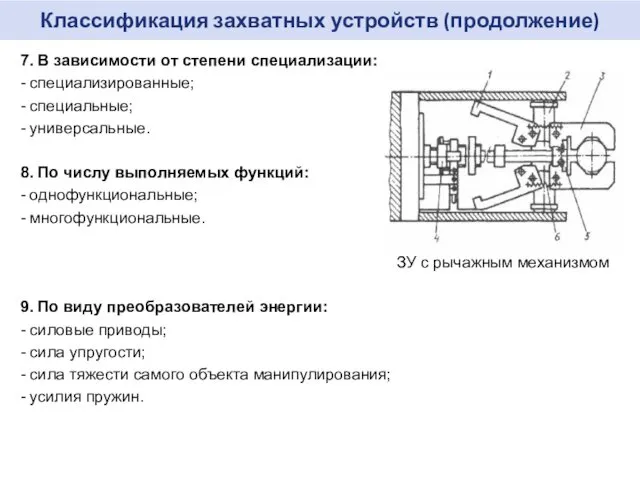
- 16. Классификация захватных устройств (продолжение) 7. В зависимости от степени специализации: - специализированные; - специальные; - универсальные.
- 17. Механические захватные устройства ПР Механические ЗУ классифицируют: 1. По типу привода (пружинные, пневматические, гидравлические, электромеханические). 2.
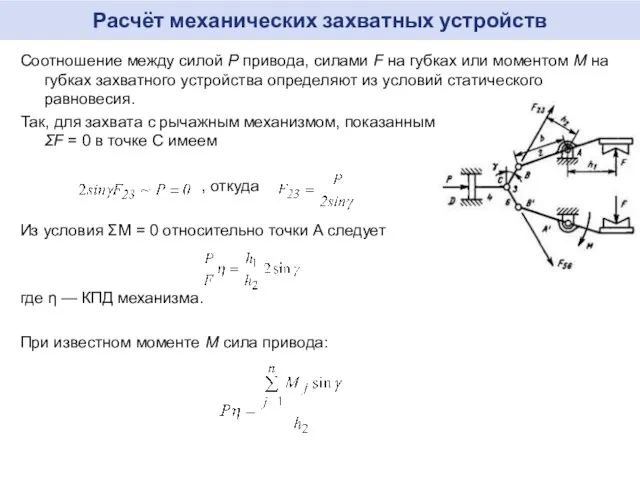
- 18. Расчёт механических захватных устройств Соотношение между силой Р привода, силами F на губках или моментом М
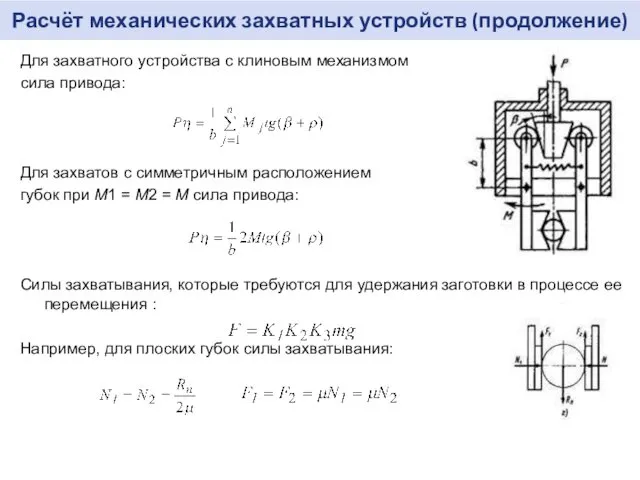
- 19. Расчёт механических захватных устройств (продолжение) Для захватного устройства с клиновым механизмом сила привода: Для захватов с
- 20. Схваты манипуляторов Схват клешнеобразной формы Надувной схват с пятью гибкими резиновыми пальцами Схваты, предназначенные для переноса
- 21. Схваты манипуляторов (продолжение) Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев Немеханические схваты: магнитный (слева), с
- 22. Схваты манипуляторов (продолжение) Робот-манипулятор с рабочим инструментом в качестве выходного звена
- 23. Схваты манипуляторов (продолжение) Разнообразные конструкции манипуляторов, обусловленные особенностями их применения
- 24. Схваты манипуляторов (продолжение) Робот с двумя одинаковыми манипуляторами
- 25. Рабочие органы современных мехатронных модулей Робот ABB с пистолетом для точечной сварки Роботы Fanuc (Япония)
- 27. Скачать презентацию
Основные понятия и определения
Захватное устройство промышленного робота (ЗУ) - рабочий орган
Основные понятия и определения
Захватное устройство промышленного робота (ЗУ) - рабочий орган

Движения манипулятора
Движения манипулятора

Совместные перемещения звеньев манипулятора
Криволинейная пространственная траектория сложной формы,
описываемая схватом
Совместные перемещения звеньев манипулятора
Криволинейная пространственная траектория сложной формы,
описываемая схватом
Требования к захватным устройствам
К захватным устройствам ПР предъявляются требования общего характера
Требования к захватным устройствам
К захватным устройствам ПР предъявляются требования общего характера
Требования к захватным устройствам (продолжение)
Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства
Требования к захватным устройствам (продолжение)
Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства

Структура захватных устройств
Общая структура захватных устройств
Структура захватных устройств
Общая структура захватных устройств
Структура захватных устройств (продолжение)
Основные элементы ЗУ:
соединительные фланцы;
силовые приводы или устройства преобразования
Структура захватных устройств (продолжение)
Основные элементы ЗУ:
соединительные фланцы;
силовые приводы или устройства преобразования
Классификация захватных устройств
1. По взаимодействию с объектом манипулирования:
- механические;
- вакуумные;
- магнитные
Классификация захватных устройств
1. По взаимодействию с объектом манипулирования:
- механические;
- вакуумные;
- магнитные
Классификация захватных устройств (продолжение)
Неприводные механические ЗУ со стопорными механизмами
Классификация захватных устройств (продолжение)
Неприводные механические ЗУ со стопорными механизмами
Классификация захватных устройств (продолжение)
Сравнительные характеристики электромагнитных и вакуумных ЗУ
Классификация захватных устройств (продолжение)
Сравнительные характеристики электромагнитных и вакуумных ЗУ
Классификация захватных устройств (продолжение)
2. В зависимости от вида контакта рабочего элемента
Классификация захватных устройств (продолжение)
2. В зависимости от вида контакта рабочего элемента

Классификация захватных устройств (продолжение)
3. По способу ориентирования деталей:
- центрирующие;
- базирующие;
- фиксирующие;
-
Классификация захватных устройств (продолжение)
3. По способу ориентирования деталей:
- центрирующие;
- базирующие;
- фиксирующие;
-
Классификация захватных устройств (продолжение)
4. По числу рабочих позиций:
- однопозиционные;
- многопозиционные (параллельного
Классификация захватных устройств (продолжение)
4. По числу рабочих позиций:
- однопозиционные;
- многопозиционные (параллельного

Классификация захватных устройств (продолжение)
6. По виду управления:
- неуправляемые;
- командные;
- жесткопрограммируемые;
- адаптивные.
Неуправляемые
Классификация захватных устройств (продолжение)
6. По виду управления:
- неуправляемые;
- командные;
- жесткопрограммируемые;
- адаптивные.
Неуправляемые
Классификация захватных устройств (продолжение)
7. В зависимости от степени специализации:
- специализированные;
-
Классификация захватных устройств (продолжение)
7. В зависимости от степени специализации:
- специализированные;
-

Механические захватные устройства ПР
Механические ЗУ классифицируют:
1. По типу привода (пружинные, пневматические,
Механические захватные устройства ПР
Механические ЗУ классифицируют:
1. По типу привода (пружинные, пневматические,
Расчёт механических захватных устройств
Соотношение между силой Р привода, силами F на
Расчёт механических захватных устройств
Соотношение между силой Р привода, силами F на
Расчёт механических захватных устройств (продолжение)
Для захватного устройства с клиновым механизмом
сила привода:
Для
Расчёт механических захватных устройств (продолжение)
Для захватного устройства с клиновым механизмом
сила привода:
Для

Схваты манипуляторов
Схват клешнеобразной формы Надувной схват с пятью гибкими
резиновыми пальцами
Схваты,
Схваты манипуляторов
Схват клешнеобразной формы Надувной схват с пятью гибкими
резиновыми пальцами
Схваты,

Схваты манипуляторов (продолжение)
Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев
Немеханические схваты:
Схваты манипуляторов (продолжение)
Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев
Немеханические схваты:

Схваты манипуляторов (продолжение)
Робот-манипулятор с рабочим инструментом в качестве выходного звена
Схваты манипуляторов (продолжение)
Робот-манипулятор с рабочим инструментом в качестве выходного звена

Схваты манипуляторов (продолжение)
Разнообразные конструкции манипуляторов, обусловленные
особенностями их применения
Схваты манипуляторов (продолжение)
Разнообразные конструкции манипуляторов, обусловленные
особенностями их применения

Схваты манипуляторов (продолжение)
Робот с двумя одинаковыми манипуляторами
Схваты манипуляторов (продолжение)
Робот с двумя одинаковыми манипуляторами

Рабочие органы современных мехатронных модулей
Робот ABB с пистолетом
для точечной сварки
Роботы
Рабочие органы современных мехатронных модулей
Робот ABB с пистолетом
для точечной сварки
Роботы
 R,C,L в цепи переменного тока
R,C,L в цепи переменного тока Коробка передач (4AT,JATCO). Составные части
Коробка передач (4AT,JATCO). Составные части Магнитное поле
Магнитное поле Урок физики в 8 классе Энергия топлива. Удельная теплота сгорания топлива
Урок физики в 8 классе Энергия топлива. Удельная теплота сгорания топлива Лампочка. Принцип работы лампы накаливания
Лампочка. Принцип работы лампы накаливания Перемещения в стержневой системе при произвольной нагрузке. Лекция 7
Перемещения в стержневой системе при произвольной нагрузке. Лекция 7 Классификация двигателей внутреннего сгорания
Классификация двигателей внутреннего сгорания Вес воздуха. Атмосферное давление. Физика, 7 класс
Вес воздуха. Атмосферное давление. Физика, 7 класс Мерседес - машина поколений!
Мерседес - машина поколений! Some unusual subwavelength resonances and effects: EIT, Fano-resonance, Anapoles. Review
Some unusual subwavelength resonances and effects: EIT, Fano-resonance, Anapoles. Review Урок по теме: Физические величины и их измерение.
Урок по теме: Физические величины и их измерение. Работа электростатического поля
Работа электростатического поля Электрический ток. Закон Ома для участка цепи
Электрический ток. Закон Ома для участка цепи Методы наблюдения и регистрации элементарных частиц
Методы наблюдения и регистрации элементарных частиц Неисправности гидросистемы зерноуборочного комбайна ДОН-1500 и их методы устранения
Неисправности гидросистемы зерноуборочного комбайна ДОН-1500 и их методы устранения Реактивное движение. Освоение космического пространства
Реактивное движение. Освоение космического пространства Повторение формул по физике, 7 класс
Повторение формул по физике, 7 класс Элементарная теория удара
Элементарная теория удара Квантовая теория электропроводности. Электропроводность металлов. Лекция №8
Квантовая теория электропроводности. Электропроводность металлов. Лекция №8 Виды электрических схем и их компонентов
Виды электрических схем и их компонентов Презентация Мирный атом или энергия будущего
Презентация Мирный атом или энергия будущего Первый искусственный спутник Земли
Первый искусственный спутник Земли Разработка установки для измерения магнитострикции
Разработка установки для измерения магнитострикции Сборка модели электролизера для получения водорода
Сборка модели электролизера для получения водорода Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Ядерная физика (Лекция 9)
Ядерная физика (Лекция 9) Рентгеновские лучи. Свойства, дифракция, устройство, применение рентгеновских лучей
Рентгеновские лучи. Свойства, дифракция, устройство, применение рентгеновских лучей Introductory Unit on Electricity
Introductory Unit on Electricity