- Геодезия. Задачи геодезии в разных циклах строительного производства

Содержание
- 2. Инженерная геодезия: учебник для студ. высш. учеб. заведений / Е.Б. Клюшин, М.И. Киселев, Д.Ш. Михелев, В.Д.
- 3. ВВЕДЕНИЕ Задачи геодезии в разных циклах строительного производства В период проектирования: сбор исходной картографической информации для
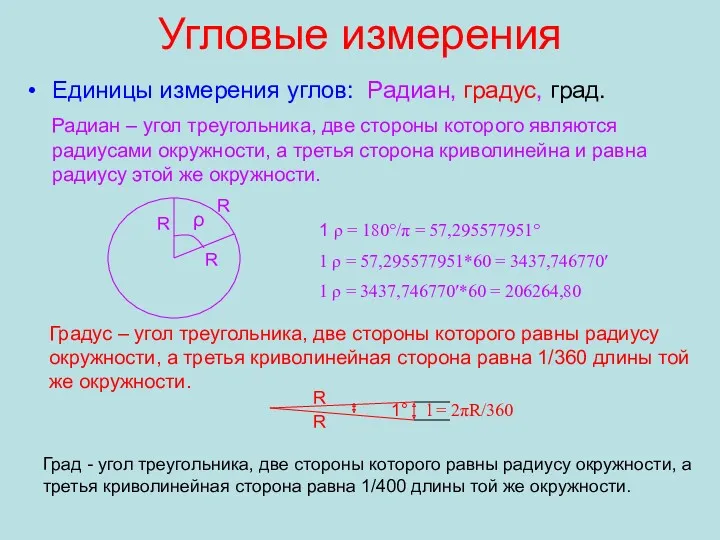
- 4. Угловые измерения Единицы измерения углов: Радиан, градус, град. Радиан – угол треугольника, две стороны которого являются
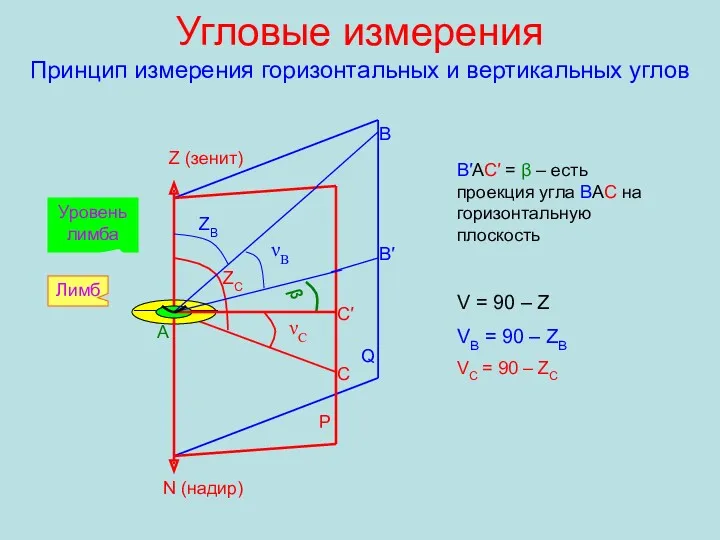
- 5. Угловые измерения Принцип измерения горизонтальных и вертикальных углов А В С В′ β νB νC P
- 6. Угловые измерения Прибор для измерения горизонтальных и вертикальных углов Основные части теодолита 2Т30 Подставка Горизонтальный круг
- 7. Угловые измерения Конструкция теодолита (тахеометра): Принцип устройства Ось вращения теодолита Уровень при горизонтальном круге Лимб горизонтального
- 8. Угловые измерения Поверки теодолита (тахеометра) Ось уровня при горизонтальном круге должна быть перпендикулярна оси вращения теодолита.
- 9. Угловые измерения Поверки теодолита (тахеометра) Вертикальная нить сетки нитей должна быть перпендикулярна а горизонтальная нить должна
- 10. Угловые измерения Способы измерения углов От нуля; Приемов; Круговых приемов Повторений 0° 00,0′ А В С
- 11. Угловые измерения Точность измерения углов βD βA βB βC A C D βA1 A1 Погрешность центрирования
- 12. Угловые измерения Точность измерения углов Δβ1, Δβ2, …, Δβn или x1, x2, …, xn x
- 13. Линейные измерения Непосредственные: 20-и метровая стальная геодезическая лента; Геодезические рулетки (стальные, тесмянные и пластиковые) с номинальной
- 14. Линейные измерения Конструкция мерной ленты 1 0,1 0,5 1,0 Ручка Штрих начала счета Отверстия Заклепка Заклепка
- 15. Линейные измерения Косвенные. Оптические дальномеры С постоянным углом и переменным базисом, нитяной дальномер С постоянным базисом
- 16. Линейные измерения Косвенные. Светодальномер. Лазерный дальномер D = Vt/2 d = D Cos v v А
- 17. +ΔL -ΔL Линейные измерения Компарирование мерных приборов Компарирование мерного прибора - сопоставление номинальной длины прибора или
- 18. Линейные измерения Методика измерения линий 20-и метровой стальной лентой Lизм = N *[(А- 1) * Lном]
- 19. Линейные измерения Геометрическое нивелирование из середины h1 = з1 – п1 h2 = з2 – п2
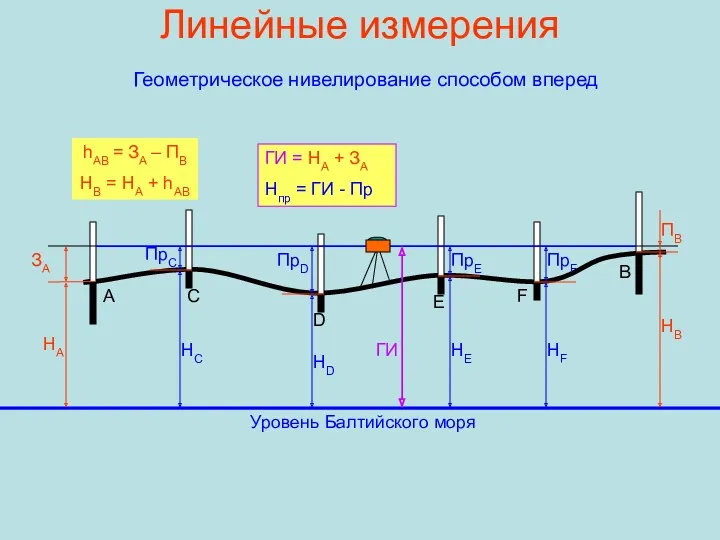
- 20. Линейные измерения Геометрическое нивелирование способом вперед А В С D E F Уровень Балтийского моря ЗА
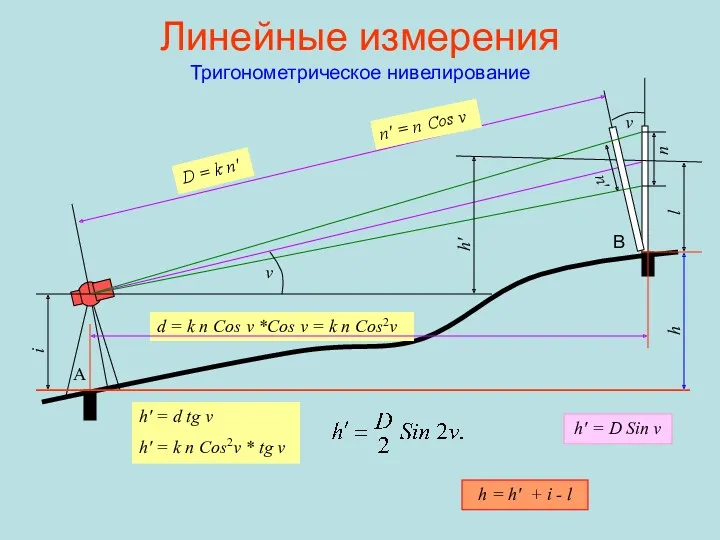
- 21. Линейные измерения Тригонометрическое нивелирование v v D = k n′ n n′ d = k n
- 22. ФИГУРА ЗЕМЛИ И МЕТОД ПРОЕКЦИЙ Общая фигура Земли, как планеты. Географическая, геодезическая и астрономическая системы координат.
- 23. ОБЩАЯ ФИГУРА ЗЕМЛИ, КАК ПЛАНЕТЫ ЭВОЛЮЦИЯ ПРЕДСТАВЛЕНИЯ ЛЮДЕЙ О ФОРМЕ ЗЕМЛИ первое – Плоскость; второе –
- 24. ПЛАН И КАРТА План – уменьшенное изображение земной поверхности выполненное в ортогональной проекции: без искажения расстояний
- 25. Системы координат Рс Нормаль к поверхности элипсоида
- 26. РАВНОУГОЛЬНАЯ ПОПЕРЕЧНО-ЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯ ЗЕМНОЙ ПОВЕРХНОСТИ (ПРОЕКЦИЯ ГАУССА-КРЮГЕРА)
- 27. Проекция Гаусса-Крюгера φ = 6° Зона 31 Зона 32 Зона 33
- 28. Плоская прямоугольная зональная система координат 0 3 6 9 12 С С С С X′ X′
- 29. Ориентирование линий на Земной поверхности истинным азимутом называют – угол, образованный северным направлением истинного меридиана и
- 30. Ориентирование линий на Земной поверхности Магнитный азимут, склонение магнитной стрелки
- 31. Ориентирование линий на Земной поверхности Ю С А В D Аи(А) X Y Ю С А
- 32. Ориентирование линий на Земной поверхности γ = (λВ – λА) Sin φ Сближение меридианов Ю
- 33. Ориентирование линий на Земной поверхности Понятие румба Ю С З В X + Y + СВ
- 34. Ориентирование линий на Земной поверхности А В Магнитный меридиан Линии параллельные осевому меридиану (линии сетки координат)
- 35. Съемка территории. Составление плана участка местности Планово-высотное обоснование Пункты триангуляции и полигонометрии: точки обозначенные на местности
- 36. Съемка территории. Составление плана участка местности Полевые работы Рекогносцировка – осмотр территории съемки; Детальная рекогносцировка →
- 37. Съемка территории. Составление плана участка местности Схема теодолитного хода β2 βприм β3 β4 β5 Dср(1-2) Dср(2-3)
- 38. 9 КЖ 154,7 10,0 8,0 4,2 4,7 14,9 11,9 Съемка территории. Составление плана участка местности Способы
- 39. Съемка территории. Составление плана участка местности Способы съемки горизонтальной ситуации Способ угловой засечки 2 3 0
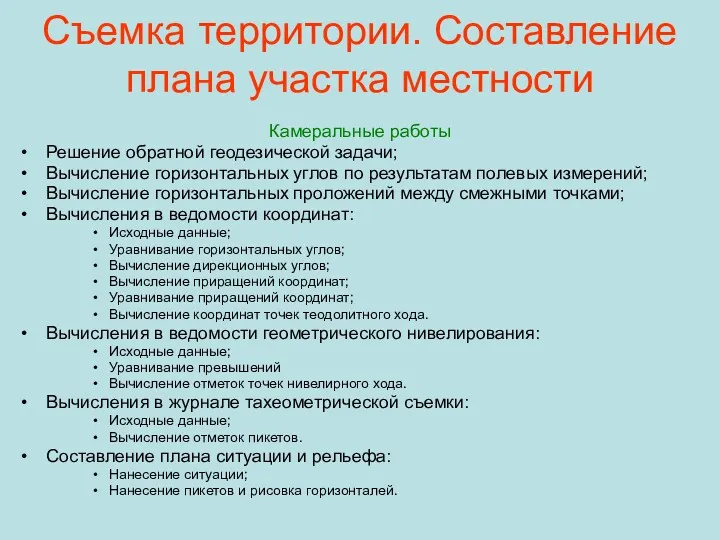
- 40. Съемка территории. Составление плана участка местности Камеральные работы Решение обратной геодезической задачи; Вычисление горизонтальных углов по
- 41. Съемка территории. Составление плана участка местности Обратная геодезическая задача А Y X yА XА y1 X1
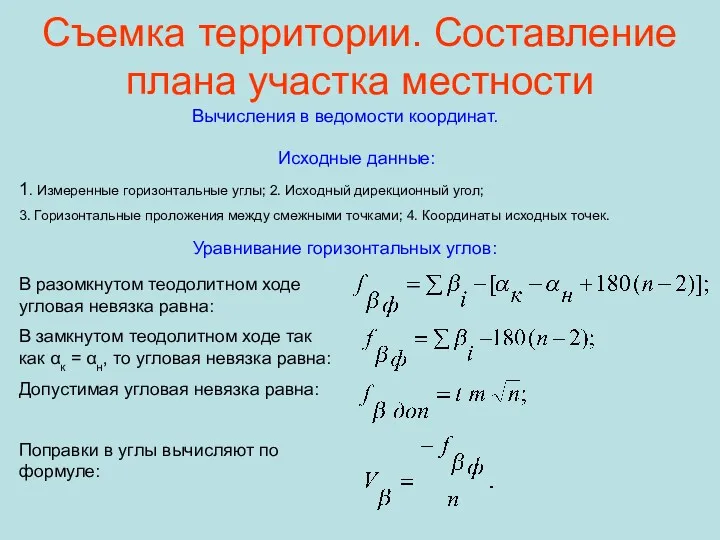
- 42. Съемка территории. Составление плана участка местности Вычисления в ведомости координат. Исходные данные: 1. Измеренные горизонтальные углы;
- 43. Съемка территории. Составление плана участка местности Вычисления в ведомости координат. Вычисление дирекционных углов С Север αпред
- 44. Съемка территории. Составление плана участка местности Вычисления в ведомости координат. Прямая геодезическая задача Y X YA
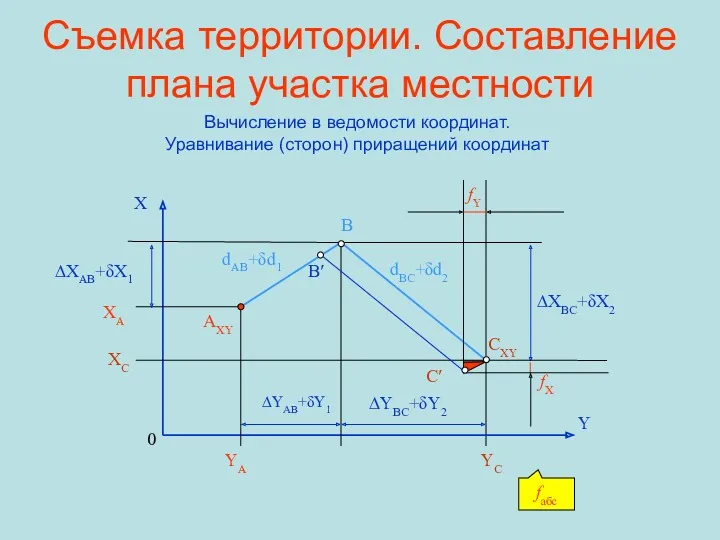
- 45. Съемка территории. Составление плана участка местности Вычисление в ведомости координат. Уравнивание (сторон) приращений координат
- 46. Съемка территории. Составление плана участка местности Вычисление в ведомости координат. Уравнивание (сторон) приращений координат (∆XAB+δX1) +
- 47. Съемка территории. Составление плана участка местности Вычисление в ведомости координат. Уравнивание (сторон) приращений координат Xпосл =
- 48. Съемка территории. Составление плана участка местности Съемка рельефа Съемочное обоснование Геометрическое нивелирование Тригонометрическое нивелирование Нивелирование застроенной
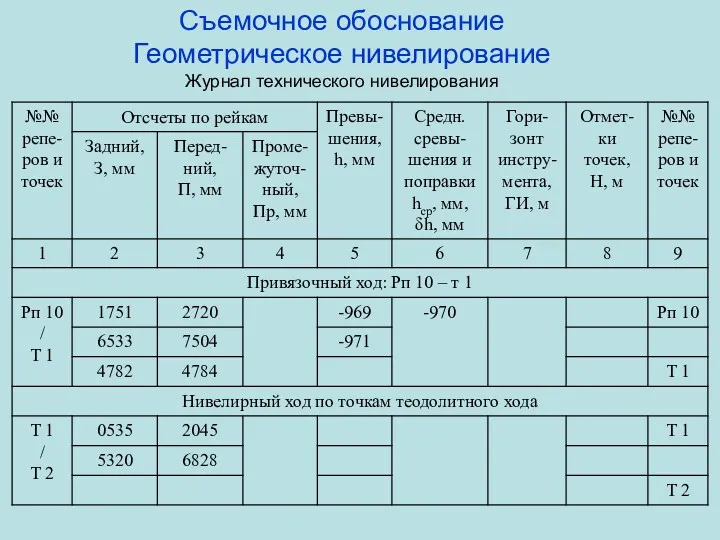
- 49. Съемочное обоснование Геометрическое нивелирование Журнал технического нивелирования
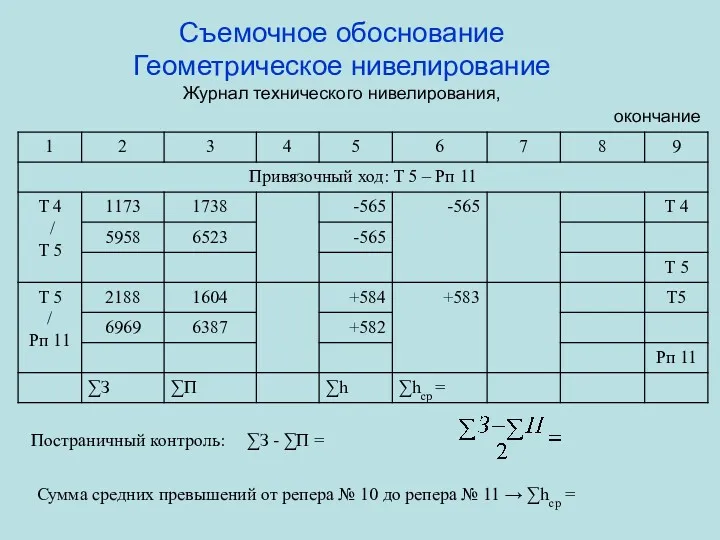
- 50. Съемочное обоснование Геометрическое нивелирование Журнал технического нивелирования, Постраничный контроль: ∑З - ∑П = Сумма средних превышений
- 51. Съемочное обоснование Геометрическое нивелирование Схема нивелирного хода Т 1 Т 2 Т 3 Т 4 Т
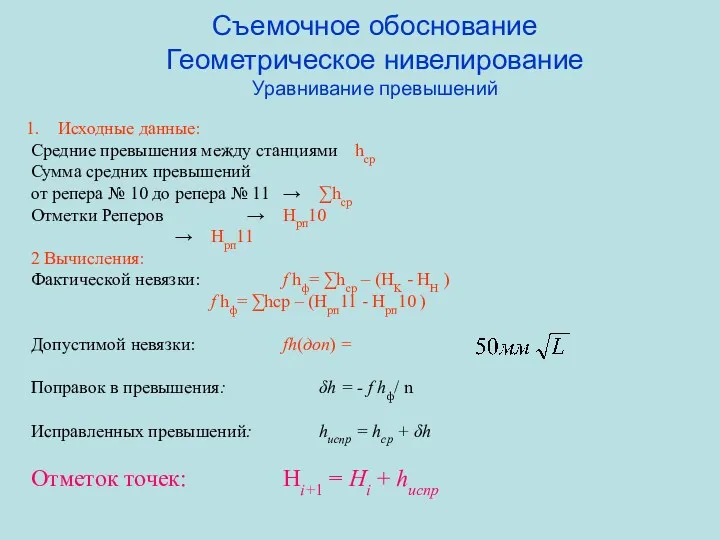
- 52. Съемочное обоснование Геометрическое нивелирование Уравнивание превышений Исходные данные: Средние превышения между станциями hср Сумма средних превышений
- 53. Съемка рельефа Абрис нивелирования застроенной территории 9 КЖ 10 КЖ 9 КЖ 9 КЖ 10 КЖ
- 54. Съемка рельефа Нивелирование застроенной территории Журнал нивелирования застроенной территории Нпосл = Нпред + h + δh
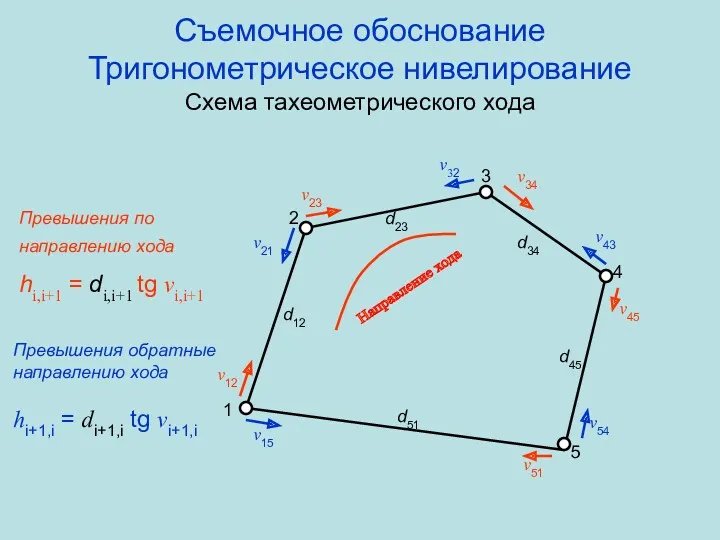
- 55. Съемочное обоснование Тригонометрическое нивелирование Схема тахеометрического хода 1 5 4 3 2 d12 d51 d45 d34
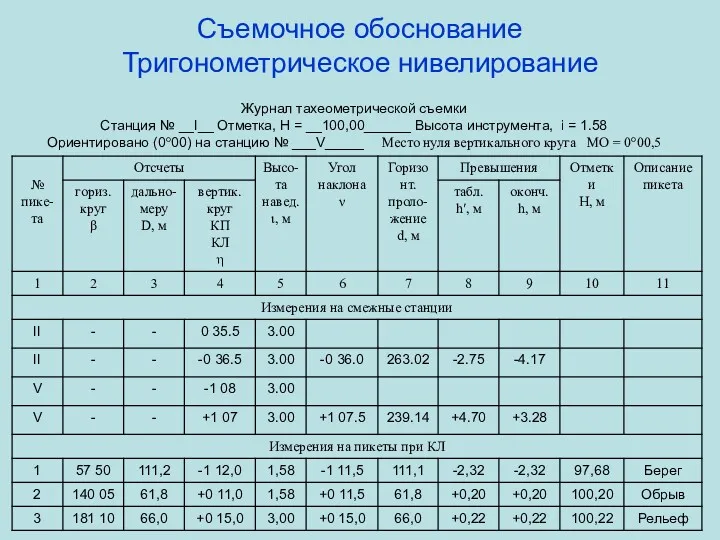
- 56. Съемочное обоснование Тригонометрическое нивелирование Журнал тахеометрической съемки Станция № __I__ Отметка, H = __100,00______ Высота инструмента,
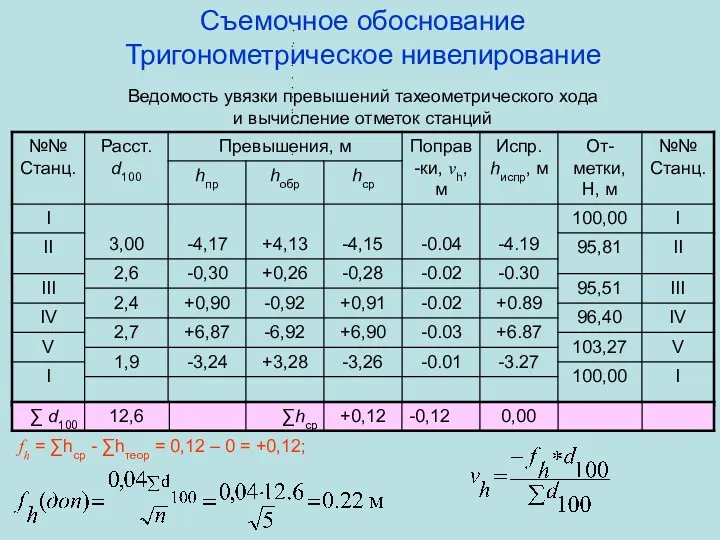
- 57. Съемочное обоснование Тригонометрическое нивелирование Ведомость увязки превышений тахеометрического хода и вычисление отметок станций fh = ∑hср
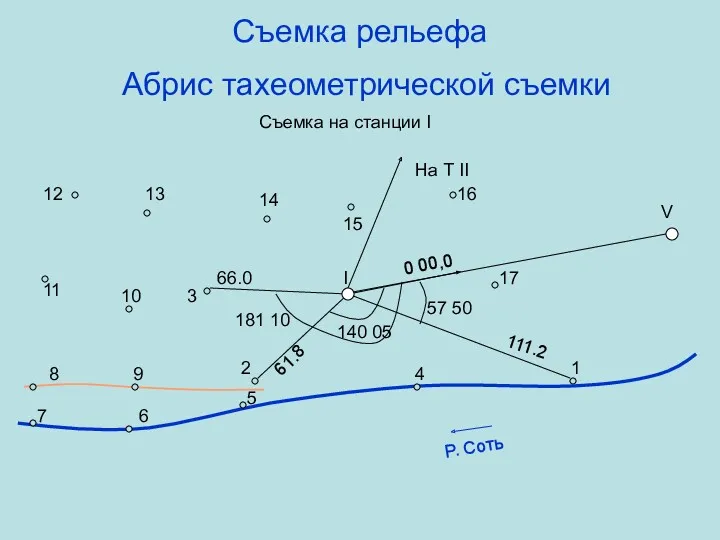
- 58. Съемка рельефа Абрис тахеометрической съемки 0 00,0 1 7 3 I V 57 50 181 10
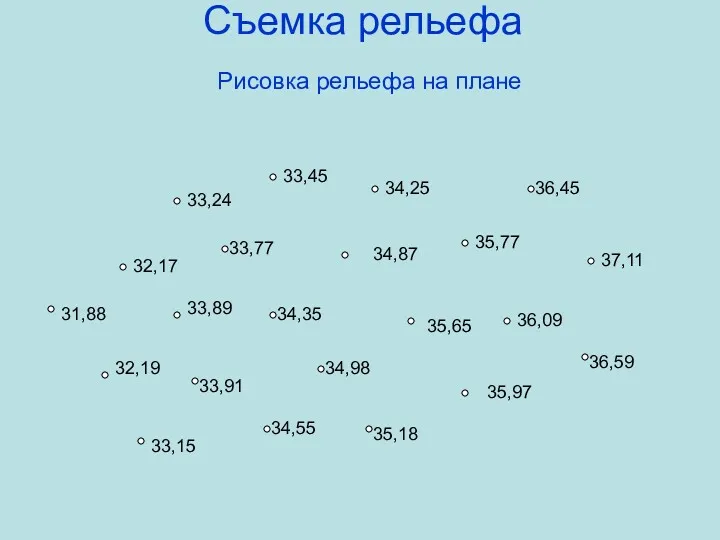
- 59. Съемка рельефа Рисовка рельефа на плане 33,24 36,59 32,17 36,09 34,87 35,77 37,11 33,45 34,25 36,45
- 60. Трассирование и нивелирование Трассирование, Разбивка ключевых точек трассы нт Ву 1 ПК 7 + 27,3 Ву
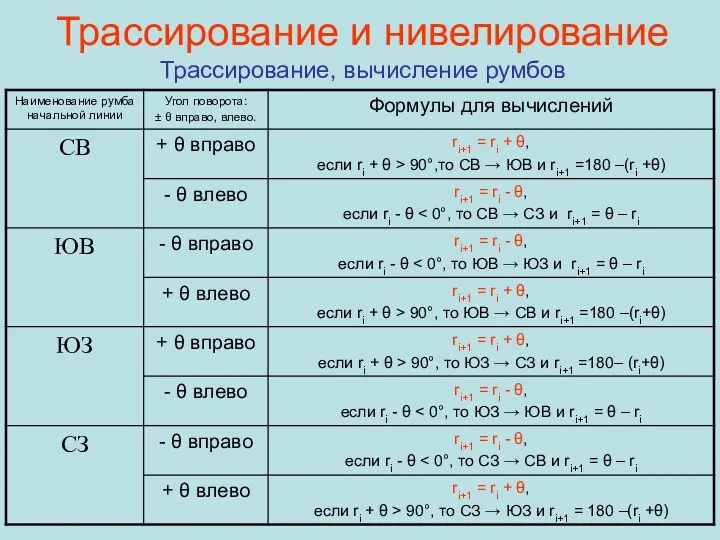
- 61. Трассирование и нивелирование Трассирование, вычисление румбов
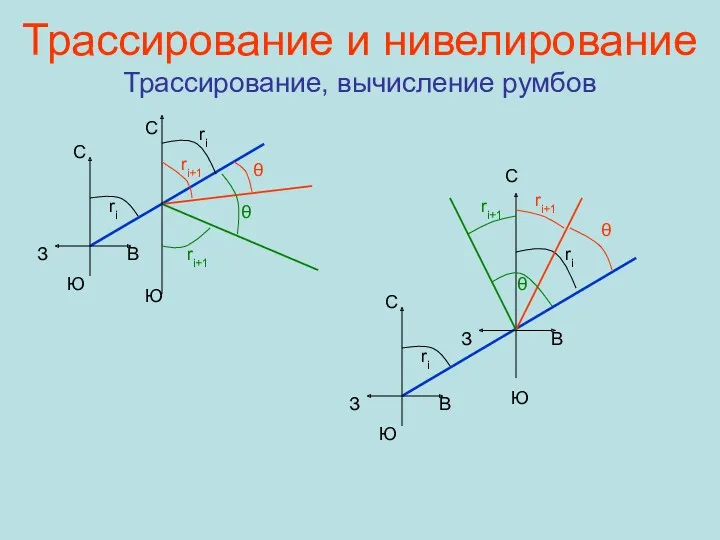
- 62. Трассирование и нивелирование Трассирование, вычисление румбов ri C Ю В З θ θ C Ю ri
- 63. Трассирование и нивелирование Трассирование и разбивка кривой Θ Т Т Ψ = Θ НК КК К
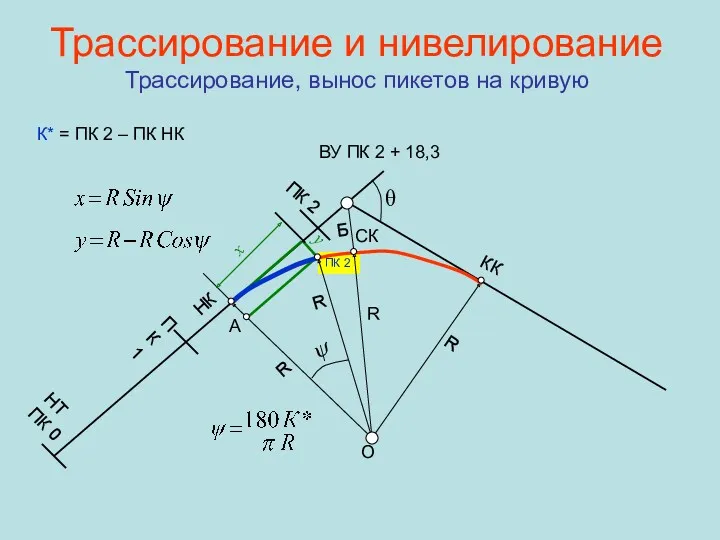
- 64. ПК 2 Трассирование и нивелирование Трассирование, вынос пикетов на кривую x y НТ ПК 0 ПК
- 65. Трассирование и нивелирование Трассирование, ведомость прямых и кривых
- 66. Трассирование и нивелирование Нивелирование, продольный профиль 30 70 60 40 60,52 39,48 θ = 18° 15′
- 67. Элементы теории погрешностей геодезических измерений Свойства измеренных величин и свойства погрешностей : вероятнейшие, истинные. Классификация погрешностей:
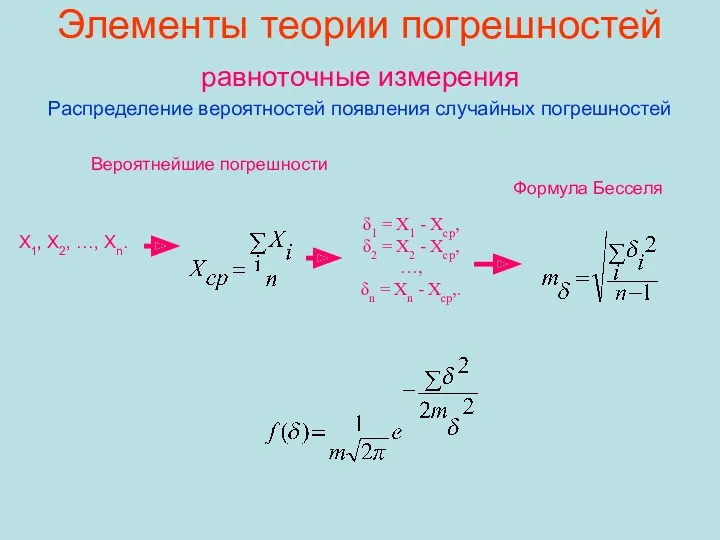
- 68. Элементы теории погрешностей равноточные измерения Распределение вероятностей появления случайных погрешностей X1, X2, …, Xn. δ1 =
- 69. Элементы теории погрешностей равноточные измерения Распределение вероятностей появления случайных погрешностей Истинные погрешности f1(x), f2(x), …, fn(X).
- 70. Элементы теории погрешностей Распределение вероятностей появления случайных погрешностей Для 68,3 % от n, δ ≤ 1m
- 71. Элементы теории погрешностей Случайные погрешности обладают следующими свойствами: Свойством предельного значения. Абсолютные значения случайных погрешностей при
- 72. Элементы теории погрешностей Оценка точности измерений По разностям двойных измерений: d1 = x1 – x2, d2
- 73. Элементы теории погрешностей Оценка точности измерений Относительная погрешность
- 75. Скачать презентацию
Инженерная геодезия: учебник для студ. высш. учеб. заведений / Е.Б. Клюшин,
ВВЕДЕНИЕ
Задачи геодезии в разных циклах строительного производства
В период проектирования:
сбор исходной
ВВЕДЕНИЕ
Задачи геодезии в разных циклах строительного производства
В период проектирования:
сбор исходной
Угловые измерения
Единицы измерения углов: Радиан, градус, град.
Радиан – угол треугольника, две
Угловые измерения
Единицы измерения углов: Радиан, градус, град.
Радиан – угол треугольника, две
Угловые измерения
Принцип измерения горизонтальных и вертикальных углов
А
В
С
В′
β
νB
νC
P
Q
Лимб
Уровень лимба
С′
Z (зенит)
N (надир)
ZB
ZC
B′AC′ =
Угловые измерения
Принцип измерения горизонтальных и вертикальных углов
А
В
С
В′
β
νB
νC
P
Q
Лимб
Уровень лимба
С′
Z (зенит)
N (надир)
ZB
ZC
B′AC′ =

Угловые измерения
Прибор для измерения горизонтальных и вертикальных углов
Основные части теодолита 2Т30
Подставка
Горизонтальный
Угловые измерения
Прибор для измерения горизонтальных и вертикальных углов
Основные части теодолита 2Т30
Подставка
Горизонтальный
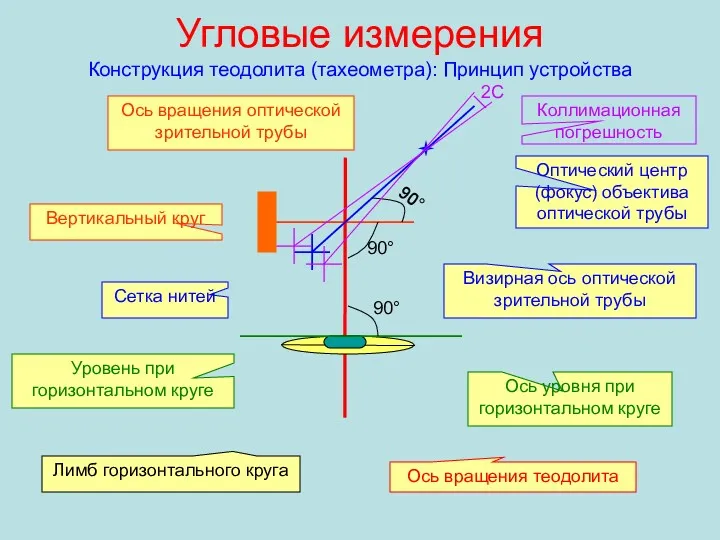
Угловые измерения
Конструкция теодолита (тахеометра): Принцип устройства
Ось вращения теодолита
Уровень при горизонтальном круге
Лимб
Угловые измерения
Конструкция теодолита (тахеометра): Принцип устройства
Ось вращения теодолита
Уровень при горизонтальном круге
Лимб
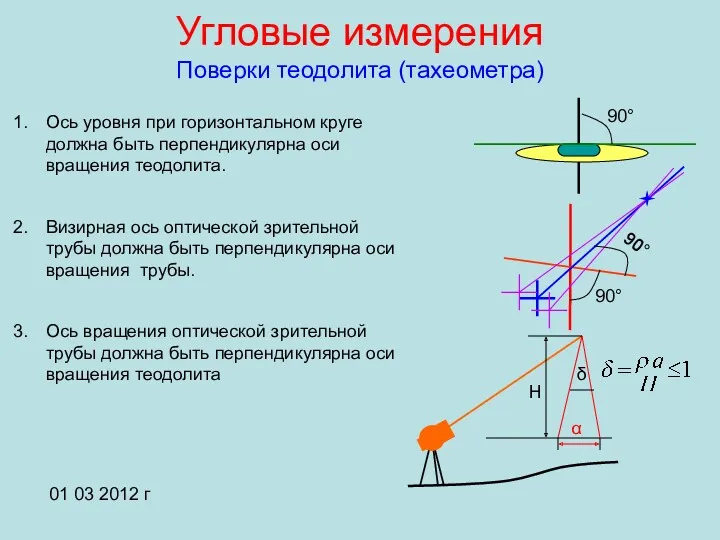
Угловые измерения
Поверки теодолита (тахеометра)
Ось уровня при горизонтальном круге должна быть
Угловые измерения
Поверки теодолита (тахеометра)
Ось уровня при горизонтальном круге должна быть
Угловые измерения
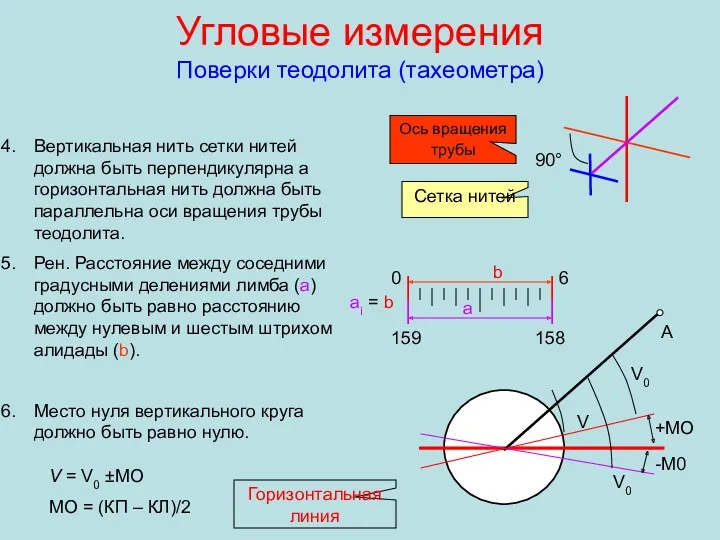
Поверки теодолита (тахеометра)
Вертикальная нить сетки нитей должна быть перпендикулярна
Угловые измерения
Поверки теодолита (тахеометра)
Вертикальная нить сетки нитей должна быть перпендикулярна
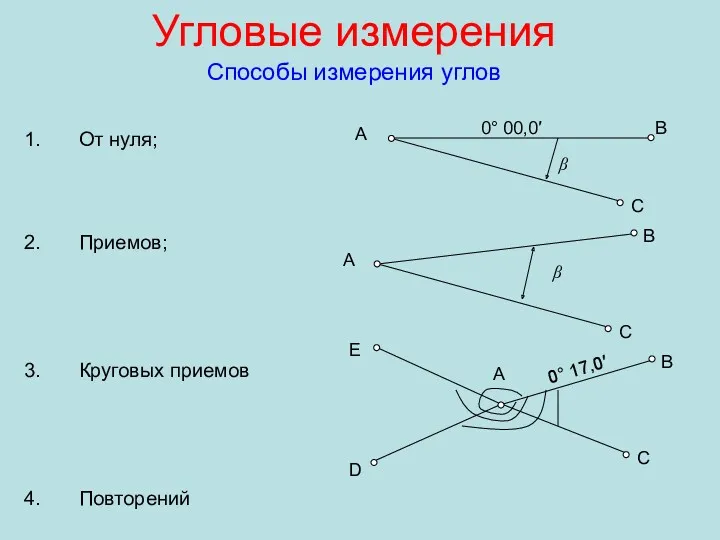
Угловые измерения
Способы измерения углов
От нуля;
Приемов;
Круговых приемов
Повторений
0° 00,0′
А
В
С
β
А
В
С
β
А
В
С
D
E
0° 17,0′
Угловые измерения
Способы измерения углов
От нуля;
Приемов;
Круговых приемов
Повторений
0° 00,0′
А
В
С
β
А
В
С
β
А
В
С
D
E
0° 17,0′
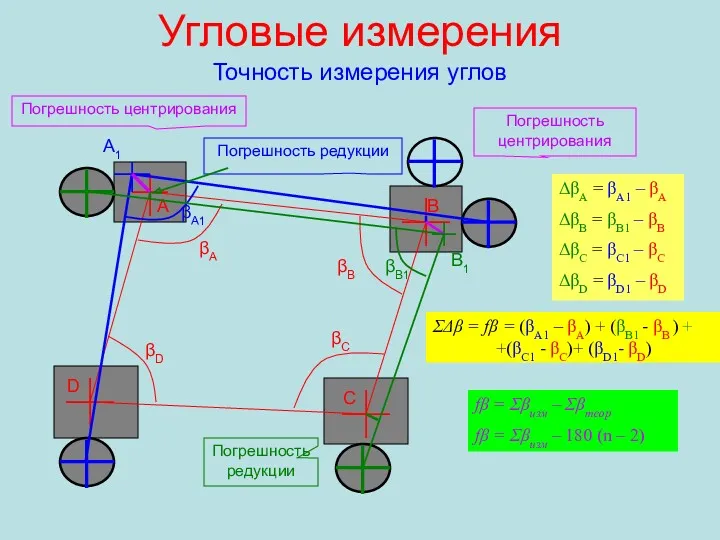
Угловые измерения
Точность измерения углов
βD
βA
βB
βC
A
C
D
βA1
A1
Погрешность центрирования
Погрешность редукции
ΔβA = βA1 – βA
ΔβB =
Угловые измерения
Точность измерения углов
βD
βA
βB
βC
A
C
D
βA1
A1
Погрешность центрирования
Погрешность редукции
ΔβA = βA1 – βA
ΔβB =
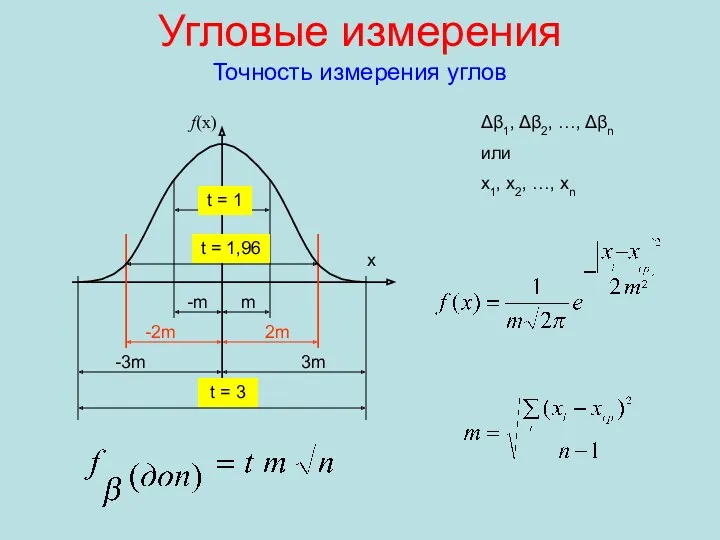
Угловые измерения
Точность измерения углов
Δβ1, Δβ2, …, Δβn
или
x1, x2, …,
Угловые измерения
Точность измерения углов
Δβ1, Δβ2, …, Δβn
или
x1, x2, …,

Линейные измерения
Непосредственные:
20-и метровая стальная геодезическая лента;
Геодезические рулетки (стальные,
Линейные измерения
Непосредственные:
20-и метровая стальная геодезическая лента;
Геодезические рулетки (стальные,
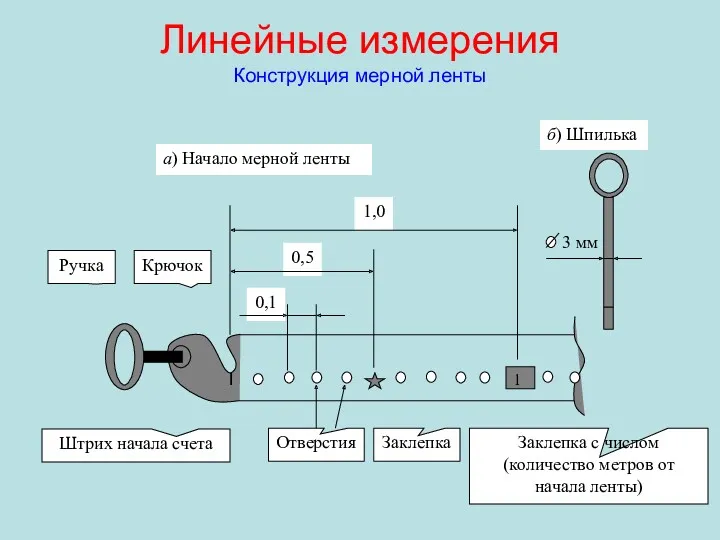
Линейные измерения
Конструкция мерной ленты
1
0,1
0,5
1,0
Ручка
Штрих начала счета
Отверстия
Заклепка
Заклепка с числом (количество метров от
Линейные измерения
Конструкция мерной ленты
1
0,1
0,5
1,0
Ручка
Штрих начала счета
Отверстия
Заклепка
Заклепка с числом (количество метров от
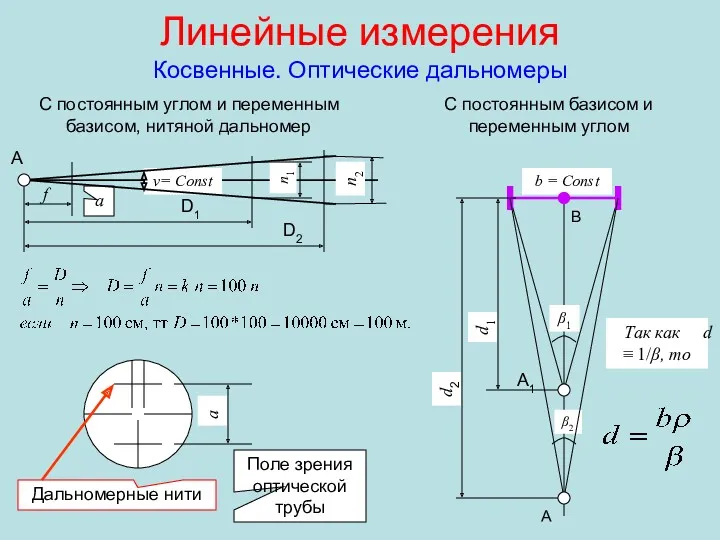
Линейные измерения
Косвенные. Оптические дальномеры
С постоянным углом и переменным базисом, нитяной дальномер
С
Линейные измерения
Косвенные. Оптические дальномеры
С постоянным углом и переменным базисом, нитяной дальномер
С
Линейные измерения
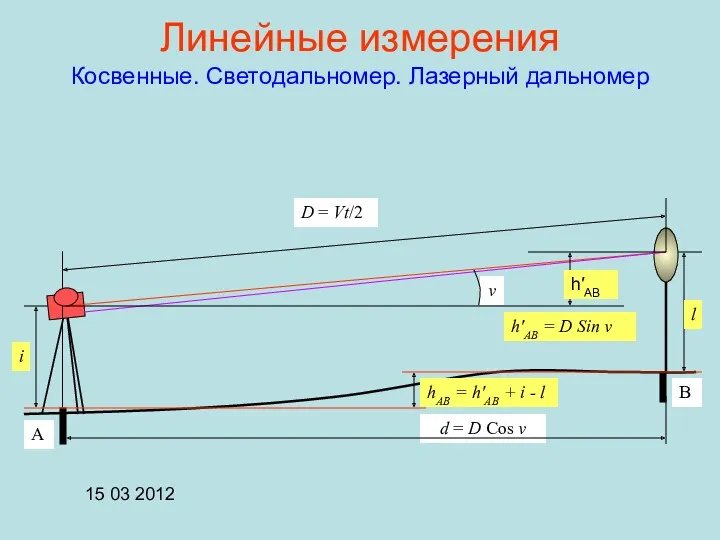
Косвенные. Светодальномер. Лазерный дальномер
D = Vt/2
d = D Cos v
v
А
В
15
Линейные измерения
Косвенные. Светодальномер. Лазерный дальномер
D = Vt/2
d = D Cos v
v
А
В
15
+ΔL
-ΔL
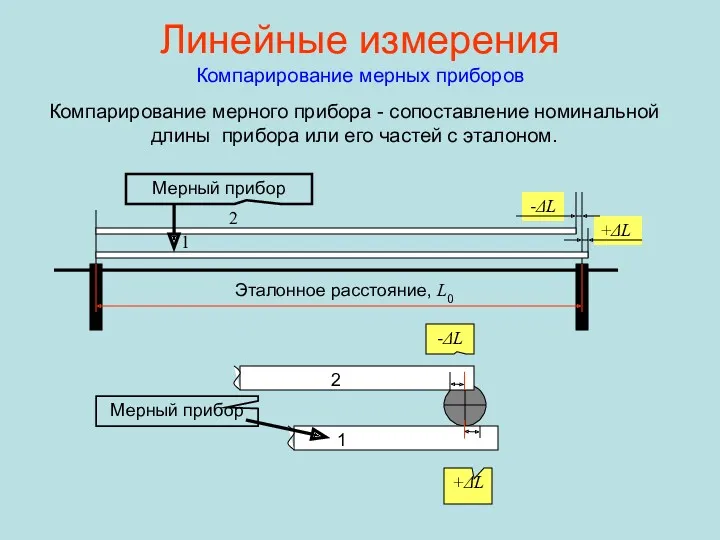
Линейные измерения
Компарирование мерных приборов
Компарирование мерного прибора - сопоставление номинальной длины прибора
+ΔL
-ΔL
Линейные измерения
Компарирование мерных приборов
Компарирование мерного прибора - сопоставление номинальной длины прибора
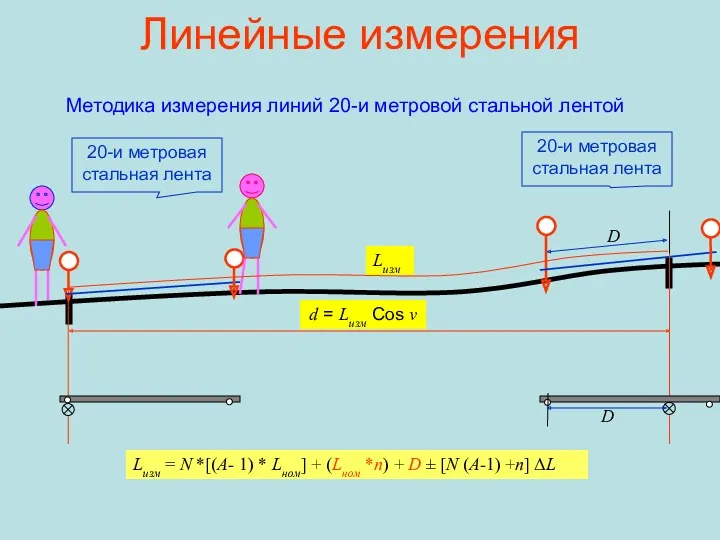
Линейные измерения
Методика измерения линий 20-и метровой стальной лентой
Lизм = N *[(А-
Линейные измерения
Методика измерения линий 20-и метровой стальной лентой
Lизм = N *[(А-
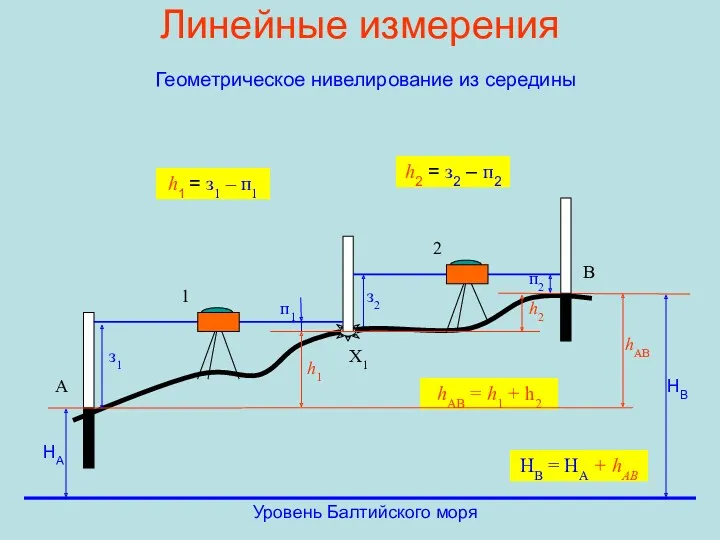
Линейные измерения
Геометрическое нивелирование из середины
h1 = з1 – п1
h2 =
Линейные измерения
Геометрическое нивелирование из середины
h1 = з1 – п1
h2 =
Линейные измерения
Геометрическое нивелирование способом вперед
А
В
С
D
E
F
Уровень Балтийского моря
ЗА
HA
ПВ
hАВ = ЗА –
Линейные измерения
Геометрическое нивелирование способом вперед
А
В
С
D
E
F
Уровень Балтийского моря
ЗА
HA
ПВ
hАВ = ЗА –
Линейные измерения
Тригонометрическое нивелирование
v
v
D = k n′
n
n′
d = k n Cos v
Линейные измерения
Тригонометрическое нивелирование
v
v
D = k n′
n
n′
d = k n Cos v
ФИГУРА ЗЕМЛИ И МЕТОД ПРОЕКЦИЙ
Общая фигура Земли, как планеты. Географическая,
ФИГУРА ЗЕМЛИ И МЕТОД ПРОЕКЦИЙ
Общая фигура Земли, как планеты. Географическая,
ОБЩАЯ ФИГУРА ЗЕМЛИ, КАК ПЛАНЕТЫ
ЭВОЛЮЦИЯ ПРЕДСТАВЛЕНИЯ ЛЮДЕЙ
О ФОРМЕ ЗЕМЛИ
первое – Плоскость;
второе
ОБЩАЯ ФИГУРА ЗЕМЛИ, КАК ПЛАНЕТЫ
ЭВОЛЮЦИЯ ПРЕДСТАВЛЕНИЯ ЛЮДЕЙ
О ФОРМЕ ЗЕМЛИ
первое – Плоскость;
второе
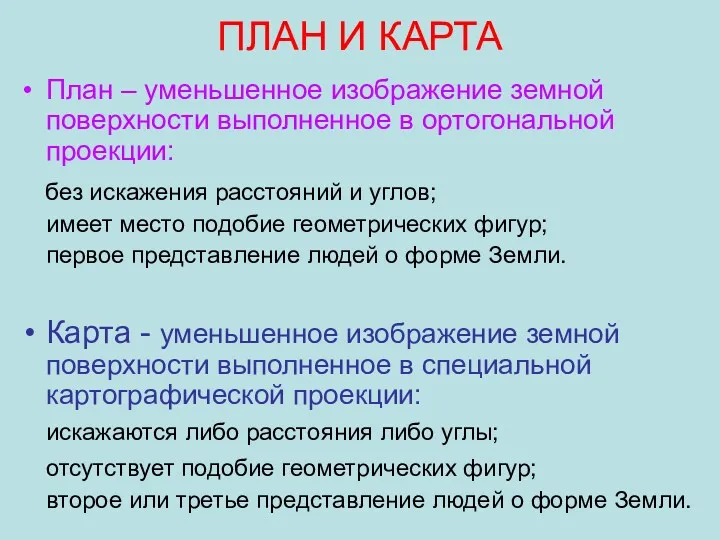
ПЛАН И КАРТА
План – уменьшенное изображение земной поверхности выполненное в ортогональной
ПЛАН И КАРТА
План – уменьшенное изображение земной поверхности выполненное в ортогональной

Системы координат
Рс
Нормаль к поверхности элипсоида
Системы координат
Рс
Нормаль к поверхности элипсоида
РАВНОУГОЛЬНАЯ ПОПЕРЕЧНО-ЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯ
ЗЕМНОЙ ПОВЕРХНОСТИ
(ПРОЕКЦИЯ ГАУССА-КРЮГЕРА)
РАВНОУГОЛЬНАЯ ПОПЕРЕЧНО-ЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯ
ЗЕМНОЙ ПОВЕРХНОСТИ
(ПРОЕКЦИЯ ГАУССА-КРЮГЕРА)
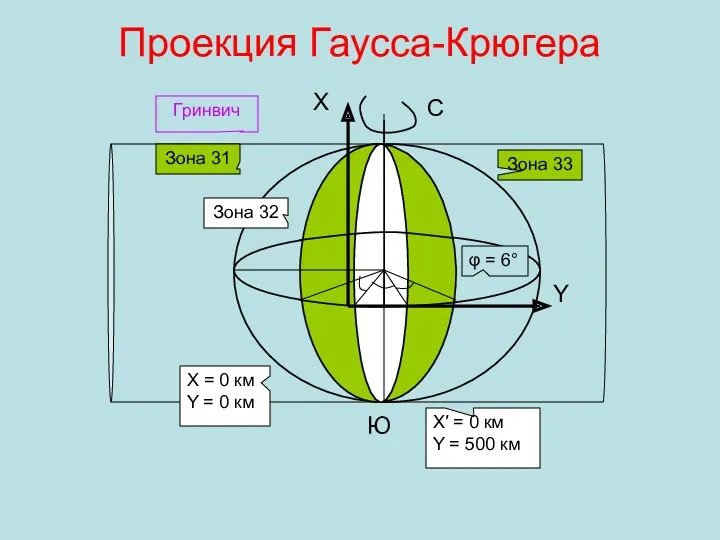
Проекция Гаусса-Крюгера
φ = 6°
Зона 31
Зона 32
Зона 33
Проекция Гаусса-Крюгера
φ = 6°
Зона 31
Зона 32
Зона 33
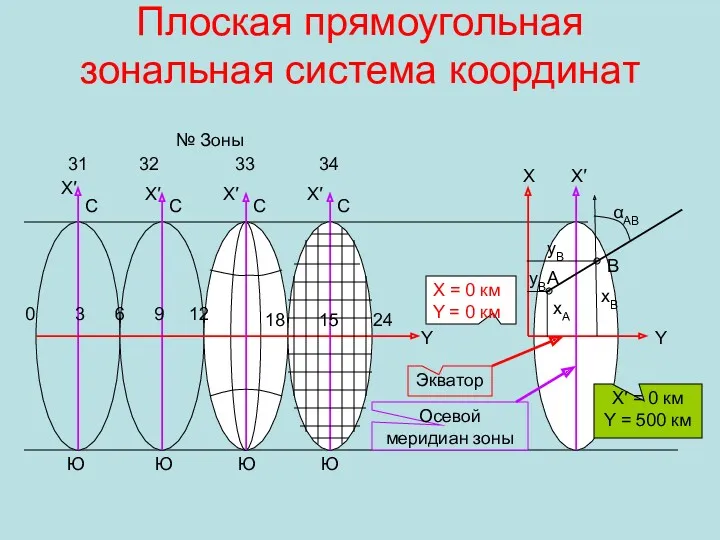
Плоская прямоугольная зональная система координат
0 3 6 9 12
С
С
С
С
X′
X′
X′
X′
Y
Экватор
Ю Ю Ю
Плоская прямоугольная зональная система координат
0 3 6 9 12
С
С
С
С
X′
X′
X′
X′
Y
Экватор
Ю Ю Ю

Ориентирование линий на Земной поверхности
истинным азимутом называют – угол, образованный северным
Ориентирование линий на Земной поверхности
истинным азимутом называют – угол, образованный северным
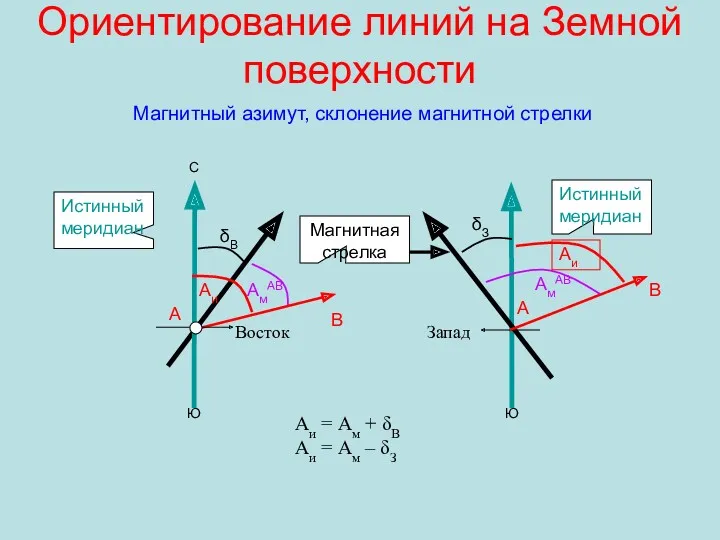
Ориентирование линий на Земной поверхности
Магнитный азимут, склонение магнитной стрелки
Ориентирование линий на Земной поверхности
Магнитный азимут, склонение магнитной стрелки
Ориентирование линий на Земной поверхности
Ю
С
А
В
D
Аи(А) < Аи(В) < Аи(D)
X
Y
Ю
С
А
В
D
X
Y
αB
αА = αВ
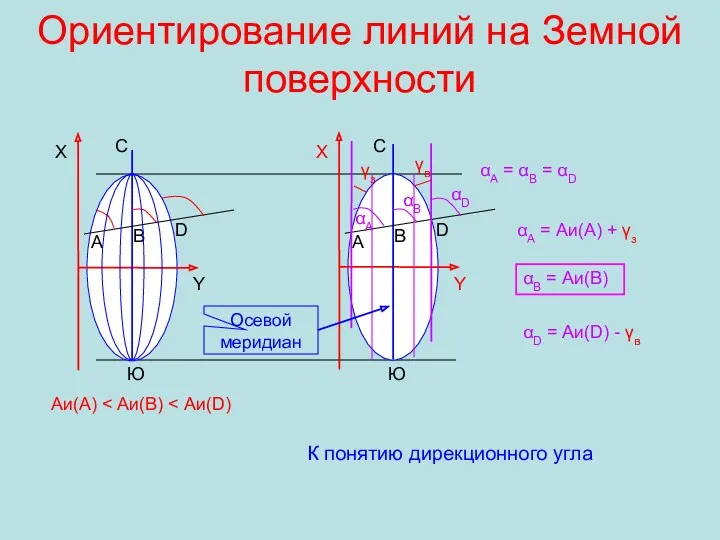
Ориентирование линий на Земной поверхности
Ю
С
А
В
D
Аи(А) < Аи(В) < Аи(D)
X
Y
Ю
С
А
В
D
X
Y
αB
αА = αВ
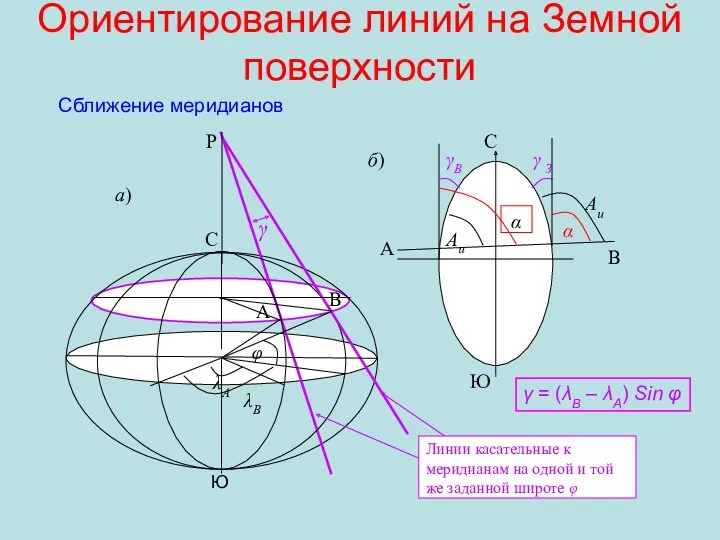
Ориентирование линий на Земной поверхности
γ = (λВ – λА) Sin φ
Сближение
Ориентирование линий на Земной поверхности
γ = (λВ – λА) Sin φ
Сближение
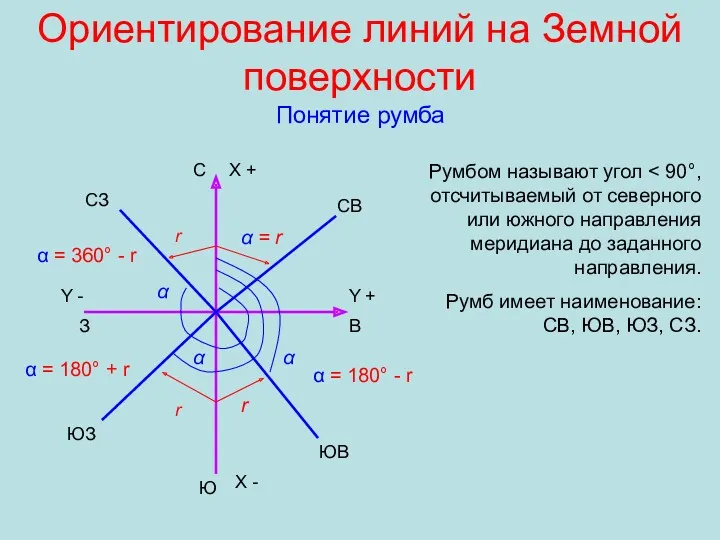
Ориентирование линий на Земной поверхности
Понятие румба
Ю
С
З
В
X +
Y +
СВ
α = r
ЮВ
α
r
α =
Ориентирование линий на Земной поверхности
Понятие румба
Ю
С
З
В
X +
Y +
СВ
α = r
ЮВ
α
r
α =
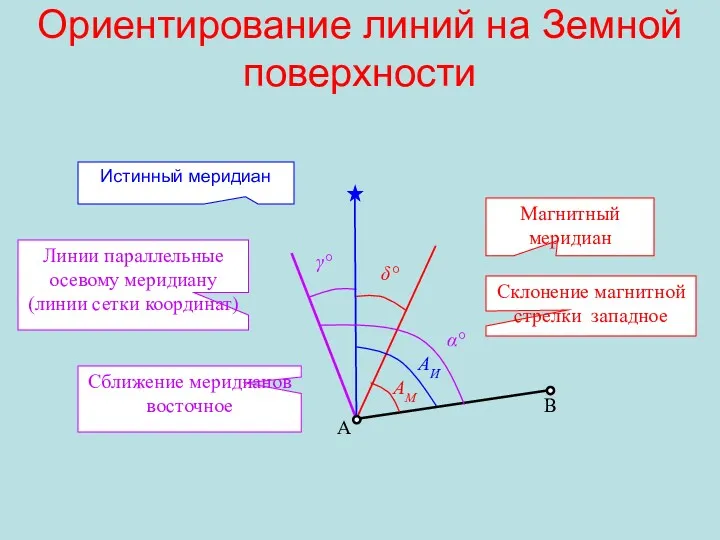
Ориентирование линий на Земной поверхности
А
В
Магнитный меридиан
Линии параллельные осевому меридиану
(линии сетки
Ориентирование линий на Земной поверхности
А
В
Магнитный меридиан
Линии параллельные осевому меридиану
(линии сетки
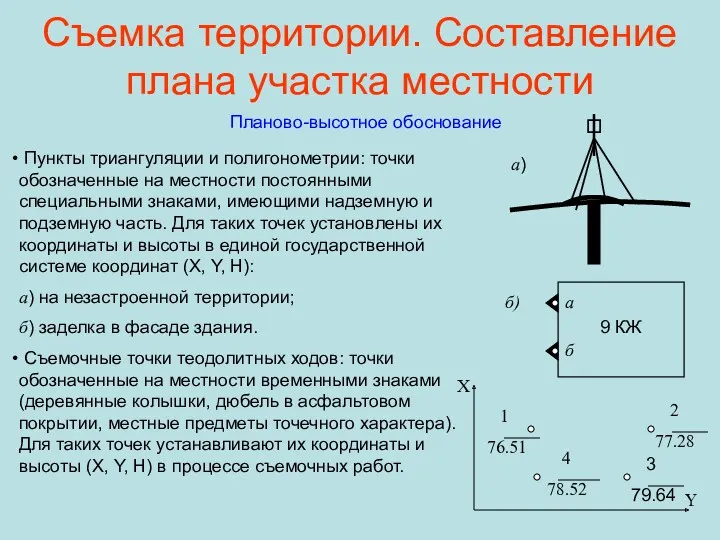
Съемка территории. Составление плана участка местности
Планово-высотное обоснование
Пункты триангуляции и полигонометрии:
Съемка территории. Составление плана участка местности
Планово-высотное обоснование
Пункты триангуляции и полигонометрии:
Съемка территории. Составление плана участка местности
Полевые работы
Рекогносцировка – осмотр территории съемки;
Детальная
Съемка территории. Составление плана участка местности
Полевые работы
Рекогносцировка – осмотр территории съемки;
Детальная

Съемка территории. Составление плана участка местности
Схема теодолитного хода
β2
βприм
β3
β4
β5
Dср(1-2)
Dср(2-3)
Dср(3-4)
Dср(4-5)
Dср(5-1)
Направление хода
β1
Аxy
1xy
2
3
4
5
Направление на
Съемка территории. Составление плана участка местности
Схема теодолитного хода
β2
βприм
β3
β4
β5
Dср(1-2)
Dср(2-3)
Dср(3-4)
Dср(4-5)
Dср(5-1)
Направление хода
β1
Аxy
1xy
2
3
4
5
Направление на

9 КЖ
154,7
10,0
8,0
4,2
4,7
14,9
11,9
Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуации
23,5
7,8
12,3
83,6
60,0
18,2
2
3
0 00,0
24,5
43°
9 КЖ
154,7
10,0
8,0
4,2
4,7
14,9
11,9
Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуации
23,5
7,8
12,3
83,6
60,0
18,2
2
3
0 00,0
24,5
43°
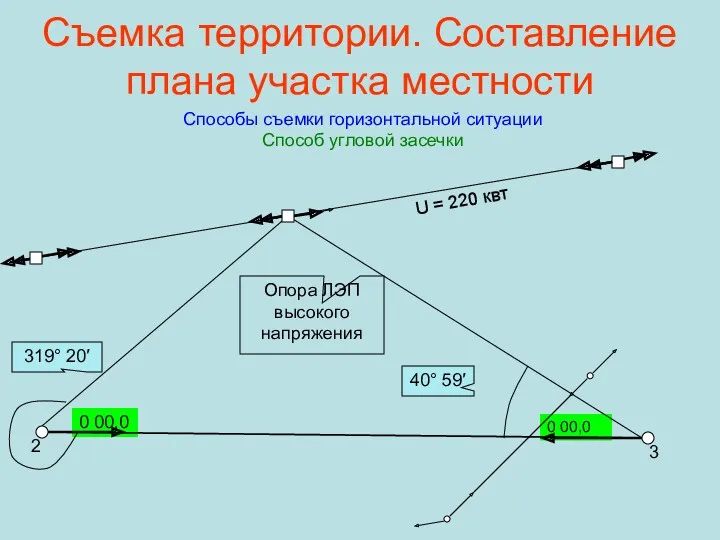
Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуации
Способ угловой засечки
2
3
0
Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуации
Способ угловой засечки
2
3
0
Съемка территории. Составление плана участка местности
Камеральные работы
Решение обратной геодезической задачи;
Вычисление горизонтальных
Съемка территории. Составление плана участка местности
Камеральные работы
Решение обратной геодезической задачи;
Вычисление горизонтальных

Съемка территории. Составление плана участка местности
Обратная геодезическая задача
А
Y
X
yА
XА
y1
X1
r = αА1
1
dA1
Съемка территории. Составление плана участка местности
Обратная геодезическая задача
А
Y
X
yА
XА
y1
X1
r = αА1
1
dA1
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.
Исходные данные:
1.
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.
Исходные данные:
1.
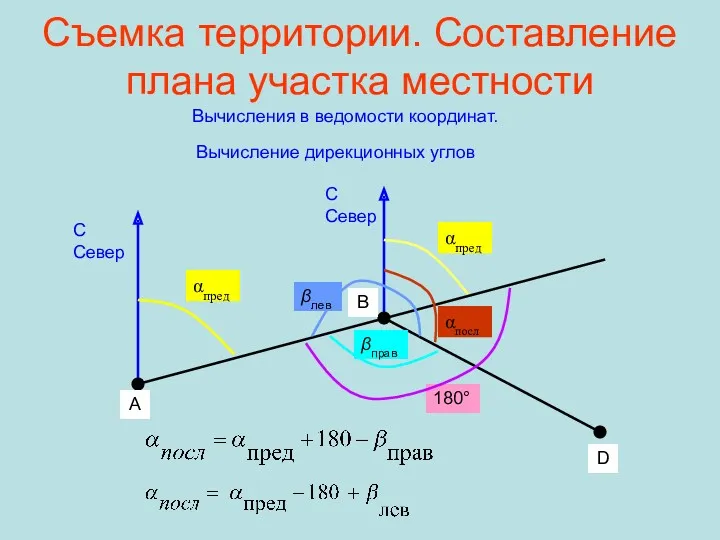
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.
Вычисление дирекционных
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.
Вычисление дирекционных
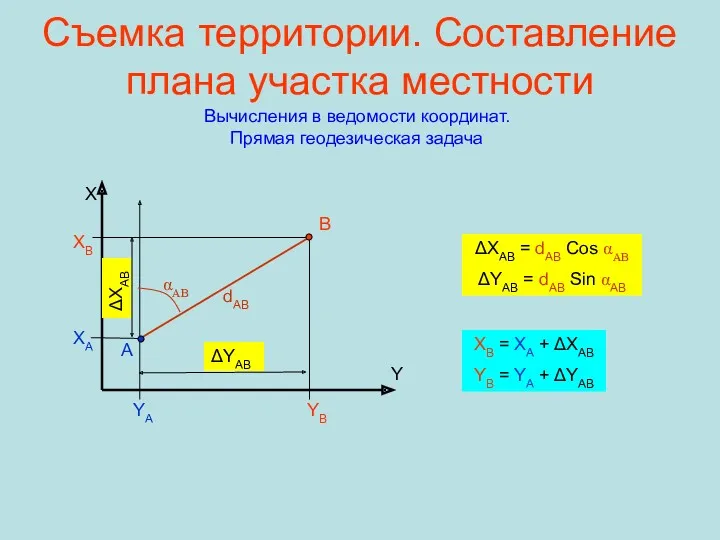
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат. Прямая геодезическая
Съемка территории. Составление плана участка местности
Вычисления в ведомости координат. Прямая геодезическая
Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)
Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)
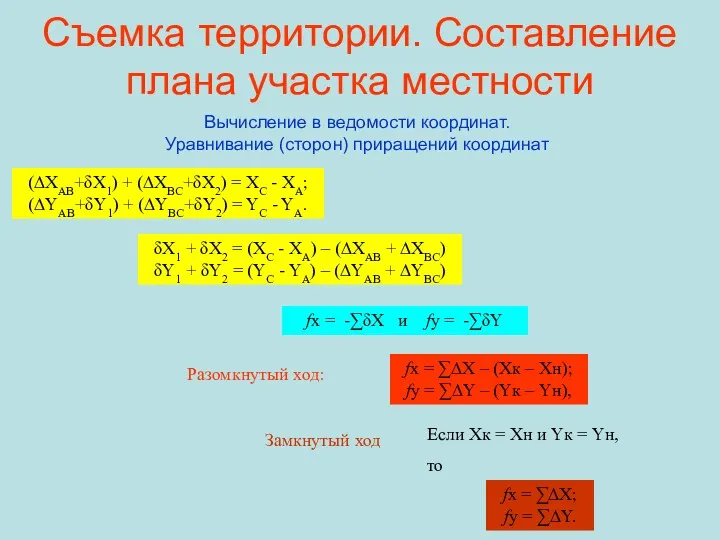
Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)
Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)

Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)
Съемка территории. Составление плана участка местности
Вычисление в ведомости координат. Уравнивание (сторон)

Съемка территории. Составление плана участка местности
Съемка рельефа
Съемочное обоснование
Геометрическое нивелирование
Тригонометрическое нивелирование
Нивелирование застроенной
Съемка территории. Составление плана участка местности
Съемка рельефа
Съемочное обоснование
Геометрическое нивелирование
Тригонометрическое нивелирование
Нивелирование застроенной
Съемочное обоснование
Геометрическое нивелирование
Журнал технического нивелирования
Съемочное обоснование
Геометрическое нивелирование
Журнал технического нивелирования
Съемочное обоснование
Геометрическое нивелирование
Журнал технического нивелирования,
Постраничный контроль: ∑З - ∑П =
Съемочное обоснование
Геометрическое нивелирование
Журнал технического нивелирования,
Постраничный контроль: ∑З - ∑П =

Съемочное обоснование
Геометрическое нивелирование
Схема нивелирного хода
Т 1
Т 2
Т 3
Т 4
Т 5
Рп 10
Рп
Съемочное обоснование
Геометрическое нивелирование
Схема нивелирного хода
Т 1
Т 2
Т 3
Т 4
Т 5
Рп 10
Рп
Съемочное обоснование
Геометрическое нивелирование
Уравнивание превышений
Исходные данные:
Средние превышения между станциями hср
Сумма средних превышений
от
Съемочное обоснование
Геометрическое нивелирование
Уравнивание превышений
Исходные данные:
Средние превышения между станциями hср
Сумма средних превышений
от
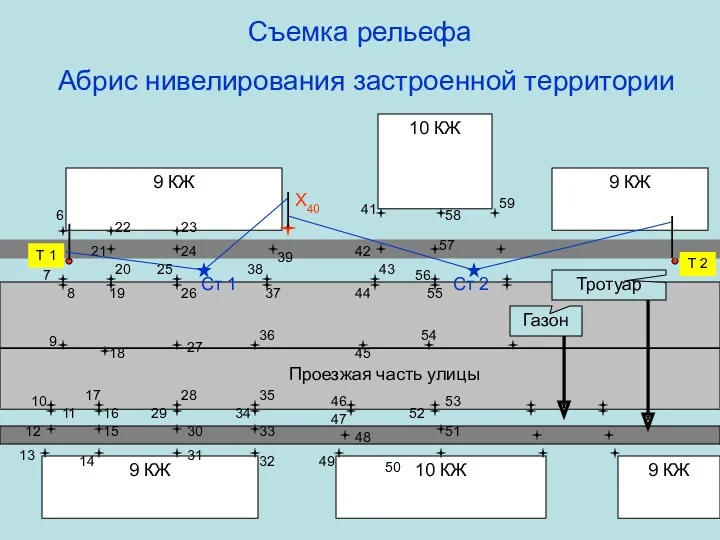
Съемка рельефа
Абрис нивелирования застроенной территории
9 КЖ
10 КЖ
9 КЖ
9 КЖ
10 КЖ
9
Съемка рельефа
Абрис нивелирования застроенной территории
9 КЖ
10 КЖ
9 КЖ
9 КЖ
10 КЖ
9
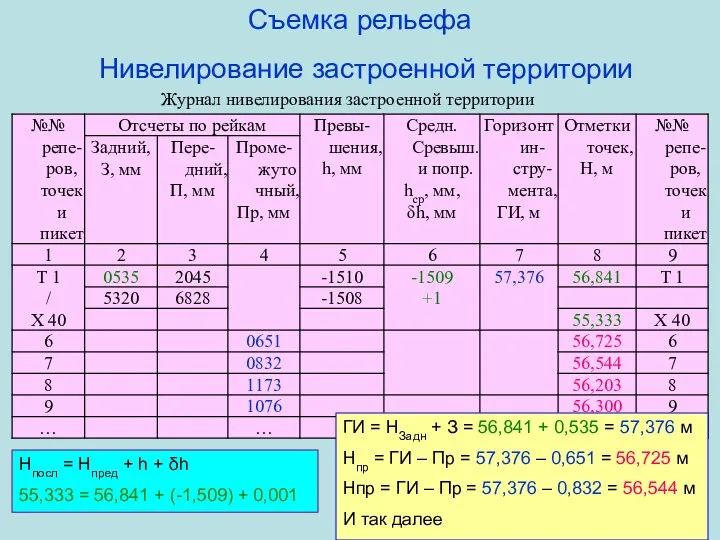
Съемка рельефа
Нивелирование застроенной территории
Журнал нивелирования застроенной территории
Нпосл = Нпред +
Съемка рельефа
Нивелирование застроенной территории
Журнал нивелирования застроенной территории
Нпосл = Нпред +
Съемочное обоснование
Тригонометрическое нивелирование
Схема тахеометрического хода
1
5
4
3
2
d12
d51
d45
d34
d23
v12
v43
v51
v34
v32
v23
v21
v54
v45
v15
Превышения по направлению хода
hi,i+1 = di,i+1
Съемочное обоснование
Тригонометрическое нивелирование
Схема тахеометрического хода
1
5
4
3
2
d12
d51
d45
d34
d23
v12
v43
v51
v34
v32
v23
v21
v54
v45
v15
Превышения по направлению хода
hi,i+1 = di,i+1
Съемочное обоснование
Тригонометрическое нивелирование
Журнал тахеометрической съемки
Станция № __I__ Отметка, H = __100,00______
Съемочное обоснование
Тригонометрическое нивелирование
Журнал тахеометрической съемки
Станция № __I__ Отметка, H = __100,00______
Съемочное обоснование
Тригонометрическое нивелирование
Ведомость увязки превышений тахеометрического хода
и вычисление отметок станций
Съемочное обоснование Тригонометрическое нивелирование Ведомость увязки превышений тахеометрического хода и вычисление отметок станций
Съемка рельефа
Абрис тахеометрической съемки
0 00,0
1
7
3
I
V
57 50
181 10
140
Съемка рельефа
Абрис тахеометрической съемки
0 00,0
1
7
3
I
V
57 50
181 10
140
Съемка рельефа
Рисовка рельефа на плане
33,24
36,59
32,17
36,09
34,87
35,77
37,11
33,45
34,25
36,45
35,18
33,89
32,19
31,88
35,65
35,97
34,35
34,98
33,91
34,55
33,15
33,77
Съемка рельефа
Рисовка рельефа на плане
33,24
36,59
32,17
36,09
34,87
35,77
37,11
33,45
34,25
36,45
35,18
33,89
32,19
31,88
35,65
35,97
34,35
34,98
33,91
34,55
33,15
33,77
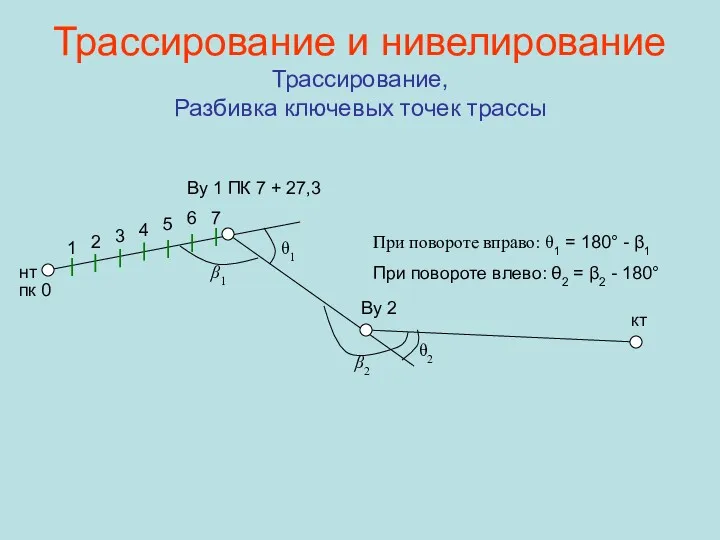
Трассирование и нивелирование
Трассирование,
Разбивка ключевых точек трассы
нт
Ву 1 ПК 7 +
Трассирование и нивелирование
Трассирование,
Разбивка ключевых точек трассы
нт
Ву 1 ПК 7 +
Трассирование и нивелирование
Трассирование, вычисление румбов
Трассирование и нивелирование
Трассирование, вычисление румбов
Трассирование и нивелирование
Трассирование, вычисление румбов
ri
C
Ю
В
З
θ
θ
C
Ю
ri
ri+1
ri+1
ri
C
Ю
В
З
C
Ю
ri
θ
ri+1
θ
ri+1
В
З
Трассирование и нивелирование
Трассирование, вычисление румбов
ri
C
Ю
В
З
θ
θ
C
Ю
ri
ri+1
ri+1
ri
C
Ю
В
З
C
Ю
ri
θ
ri+1
θ
ri+1
В
З
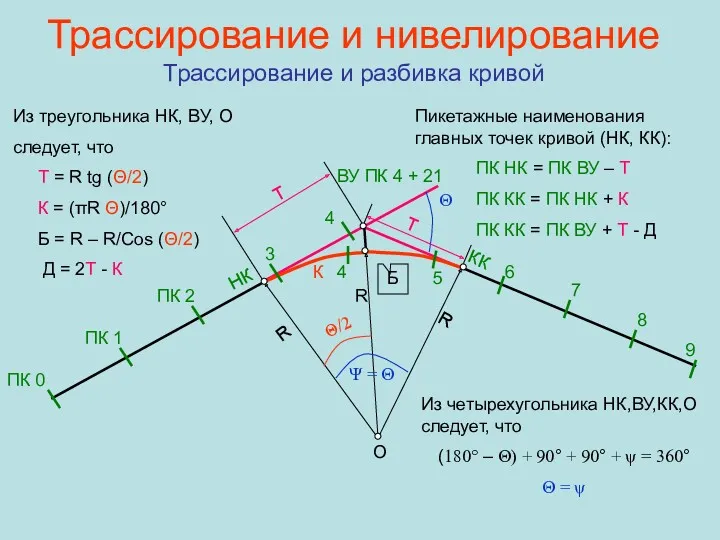
Трассирование и нивелирование Трассирование и разбивка кривой
Θ
Т
Т
Ψ = Θ
НК
КК
К
Б
ПК 0
ПК 1
ПК
Трассирование и нивелирование Трассирование и разбивка кривой
Θ
Т
Т
Ψ = Θ
НК
КК
К
Б
ПК 0
ПК 1
ПК
ПК 2
Трассирование и нивелирование Трассирование, вынос пикетов на кривую
x
y
НТ ПК 0
ПК
ПК 2
Трассирование и нивелирование Трассирование, вынос пикетов на кривую
x
y
НТ ПК 0
ПК

Трассирование и нивелирование Трассирование, ведомость прямых и кривых
Трассирование и нивелирование Трассирование, ведомость прямых и кривых
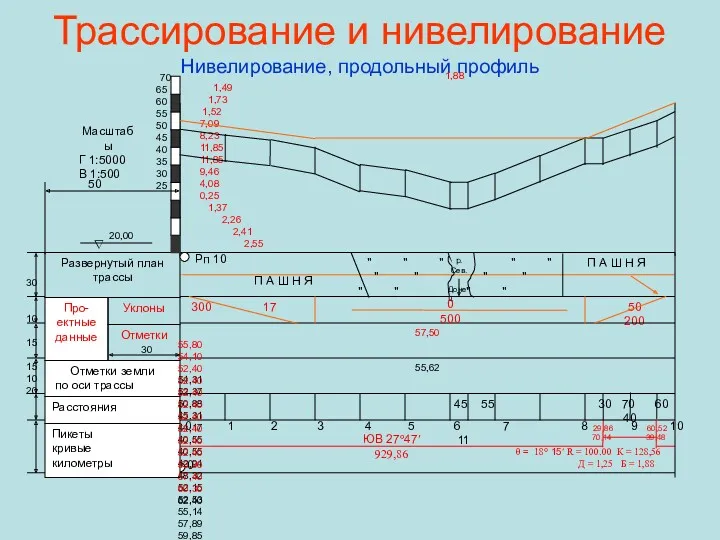
Трассирование и нивелирование Нивелирование, продольный профиль
30 70 60 40
60,52
39,48
θ =
Трассирование и нивелирование Нивелирование, продольный профиль
30 70 60 40
60,52
39,48
θ =
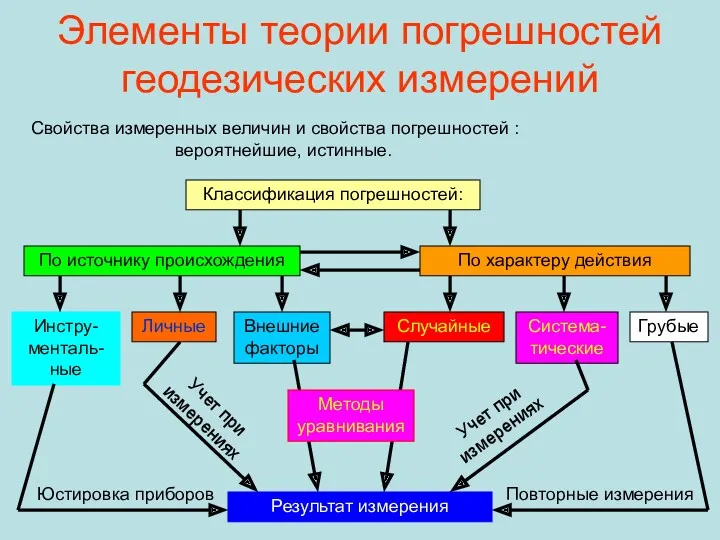
Элементы теории погрешностей геодезических измерений
Свойства измеренных величин и свойства погрешностей :
Элементы теории погрешностей геодезических измерений
Свойства измеренных величин и свойства погрешностей :
Элементы теории погрешностей
равноточные измерения
Распределение вероятностей появления случайных погрешностей
X1, X2, …,
Элементы теории погрешностей
равноточные измерения
Распределение вероятностей появления случайных погрешностей
X1, X2, …,
Элементы теории погрешностей
равноточные измерения
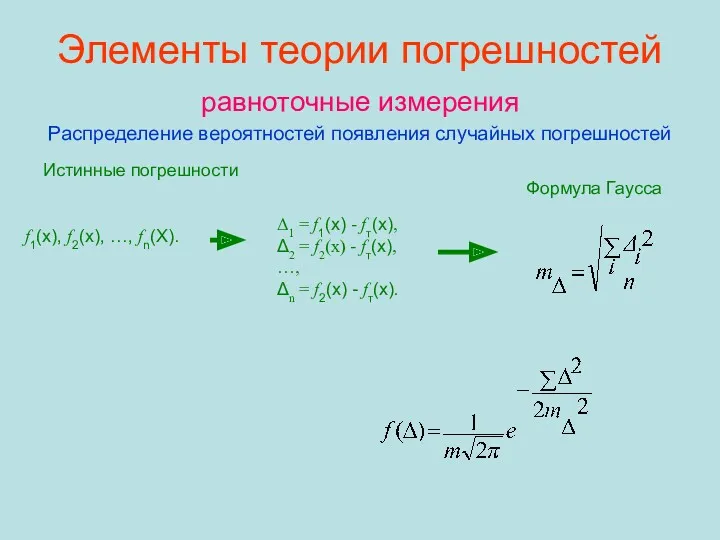
Распределение вероятностей появления случайных погрешностей
Истинные погрешности
f1(x), f2(x),
Элементы теории погрешностей
равноточные измерения
Распределение вероятностей появления случайных погрешностей
Истинные погрешности
f1(x), f2(x),
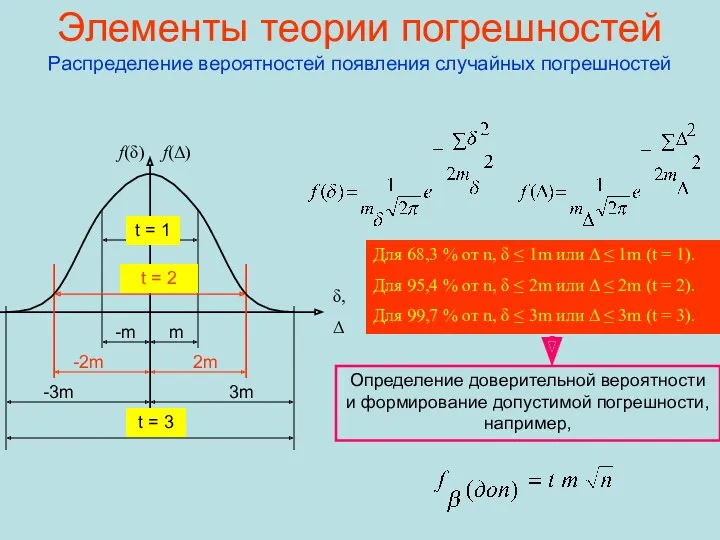
Элементы теории погрешностей Распределение вероятностей появления случайных погрешностей
Для 68,3 % от
Элементы теории погрешностей Распределение вероятностей появления случайных погрешностей
Для 68,3 % от
Элементы теории погрешностей
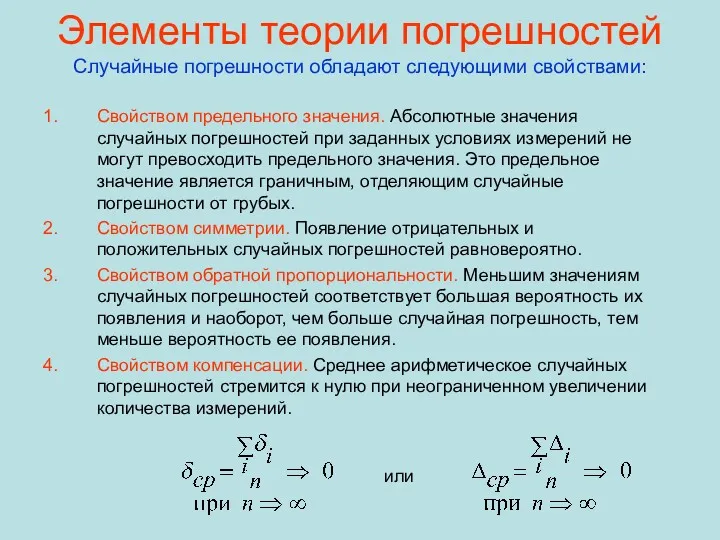
Случайные погрешности обладают следующими свойствами:
Свойством предельного значения. Абсолютные
Элементы теории погрешностей
Случайные погрешности обладают следующими свойствами:
Свойством предельного значения. Абсолютные
Элементы теории погрешностей
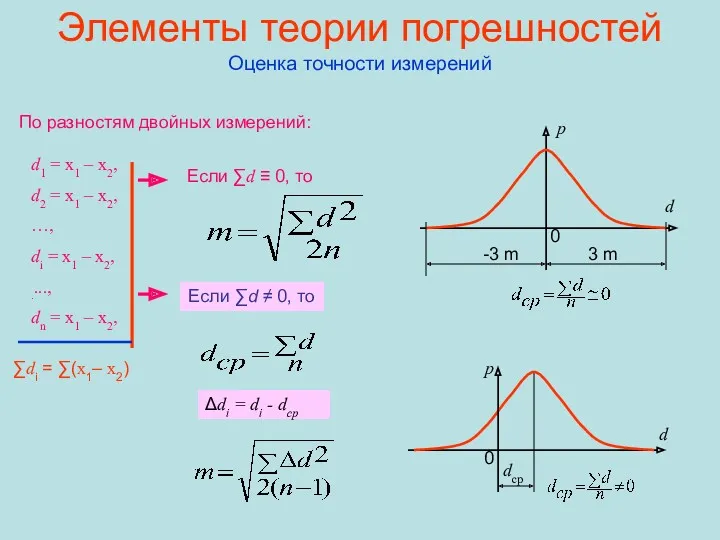
Оценка точности измерений
По разностям двойных измерений:
d1 = x1
Элементы теории погрешностей
Оценка точности измерений
По разностям двойных измерений:
d1 = x1
Элементы теории погрешностей
Оценка точности измерений
Относительная погрешность
Элементы теории погрешностей
Оценка точности измерений
Относительная погрешность
 Озоновые дыры
Озоновые дыры Электроэнергетика мира. (10 класс)
Электроэнергетика мира. (10 класс) Описание Лено-Тунгусской нефтегазоносной провинции
Описание Лено-Тунгусской нефтегазоносной провинции Критериальное оценивание как функциональная грамотность на уроках географии
Критериальное оценивание как функциональная грамотность на уроках географии Микронезия
Микронезия Новая маршрутная сеть города Березники
Новая маршрутная сеть города Березники Північно-східний економічний район
Північно-східний економічний район Озеро Титикака
Озеро Титикака Moscow
Moscow Пейзаж родной земли. Характерные черты и красота разных времён года
Пейзаж родной земли. Характерные черты и красота разных времён года Объекты природного наследия Австралии и Океании
Объекты природного наследия Австралии и Океании Антарктида - самый загадочный материк Земли
Антарктида - самый загадочный материк Земли Интеллектуальная игра по географии 7 класс По странам и континентам
Интеллектуальная игра по географии 7 класс По странам и континентам Ренійський район
Ренійський район Климат Африки
Климат Африки кл_Животные Северной Америки
кл_Животные Северной Америки Основы лесной картографии
Основы лесной картографии Платформенный эндогенный рудогенез с позиции гипотезы кластерной ядерной диссоциации. Становление карбонатитов и кимберлитов
Платформенный эндогенный рудогенез с позиции гипотезы кластерной ядерной диссоциации. Становление карбонатитов и кимберлитов My Homeland Belarus
My Homeland Belarus Паводок. Угроза паводков
Паводок. Угроза паводков Население Земли
Население Земли Основные формы рельефа Луганщины
Основные формы рельефа Луганщины Город Дедовск
Город Дедовск Геологическая деятельность озёр и болот
Геологическая деятельность озёр и болот Ю́жно-Африка́нская Респу́блика (ЮАР)
Ю́жно-Африка́нская Респу́блика (ЮАР) Абсолютная геохронология
Абсолютная геохронология Республіка Польща
Республіка Польща Туризм США
Туризм США