- Курсовые системы. Комплексирование информации в курсовых системах

Содержание
- 2. 10. Недостатки датчиков курса Основным измерителем курса в курсовых системах служит гирополукомпас, выдающий потребителям ортодромический курс.
- 3. Недостатки индукционных датчиков курса Возникают методические погрешности из-за воздействия ускорений на чувствительный элемент и отклонения его
- 4. Недостатки гироскопических датчиков курса Гирополукомпасы устойчиво работают независимо от широт, однако они не способны определять заданное
- 5. Недостатки астро - и радиодатчиков Астродатчики обладают высокой точностью измерения курса ЛА, но зависят от условий
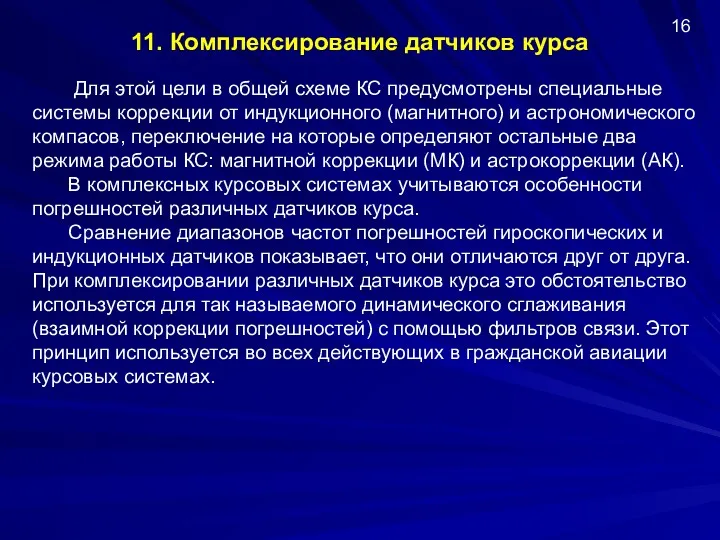
- 6. 11. Комплексирование датчиков курса Анализ недостатков измерителей курса показал, что ни один из указанных методов и
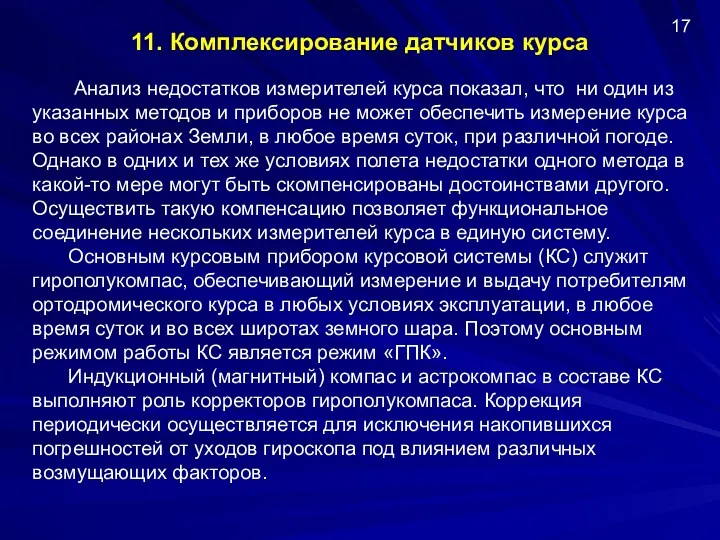
- 7. 11. Комплексирование датчиков курса Для этой цели в общей схеме КС предусмотрены специальные системы коррекции от
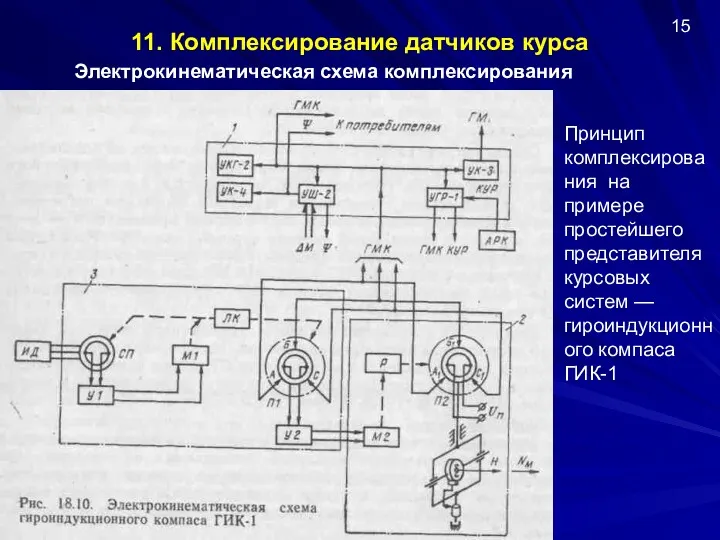
- 8. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 15 Принцип комплексирования на примере простейшего представителя курсовых систем
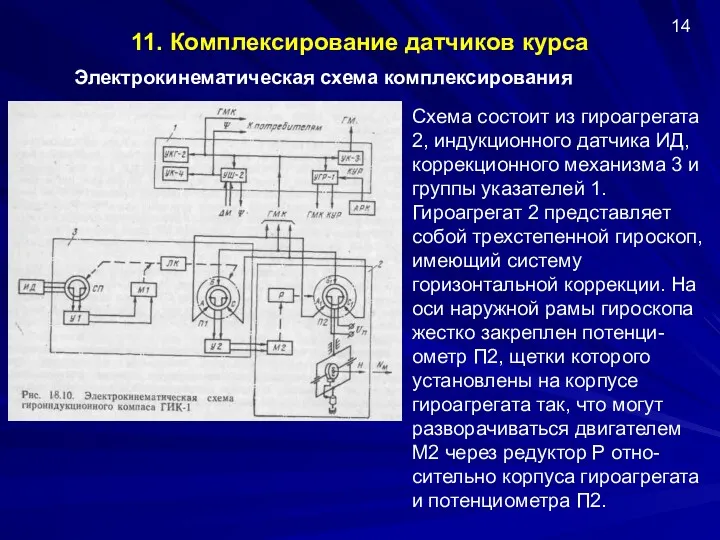
- 9. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 14 Схема состоит из гироагрегата 2, индукционного датчика ИД,
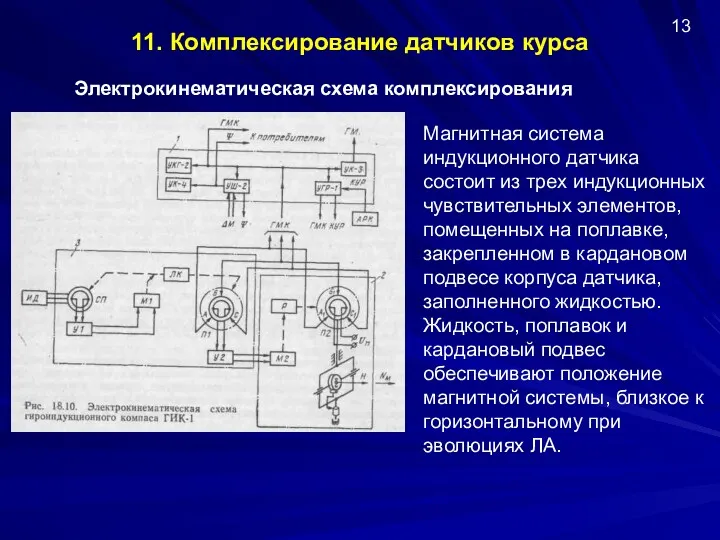
- 10. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 13 Магнитная система индукционного датчика состоит из трех индукционных
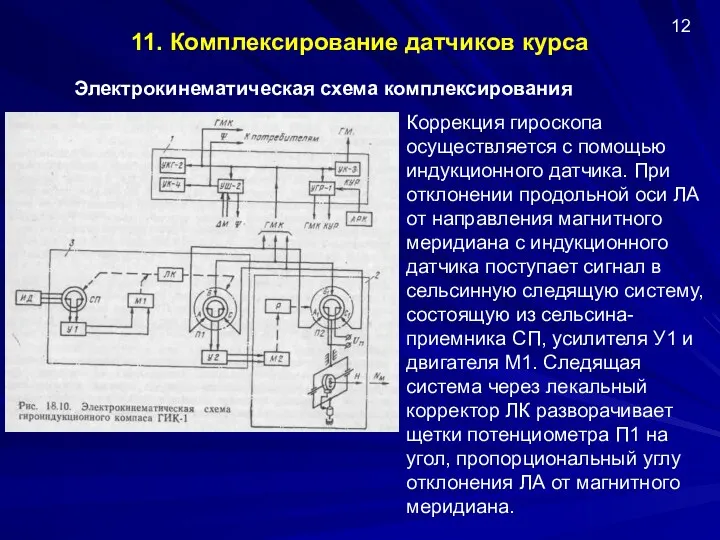
- 11. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 12 Коррекция гироскопа осуществляется с помощью индукционного датчика. При
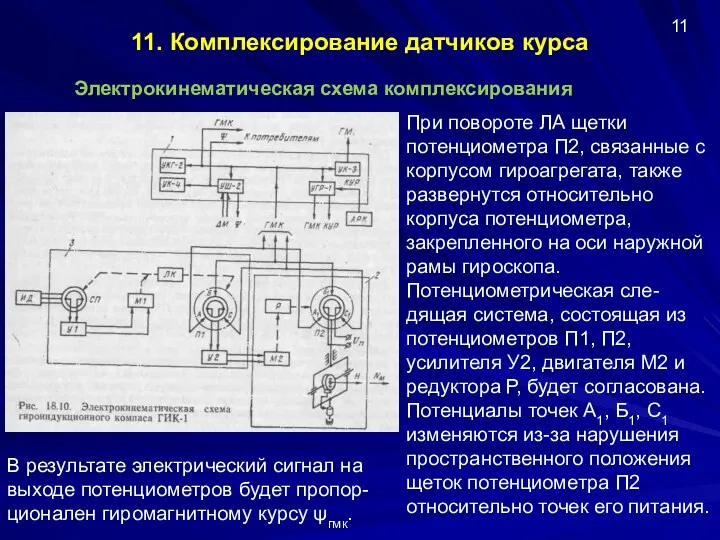
- 12. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 11 При повороте ЛА щетки потенциометра П2, связанные с
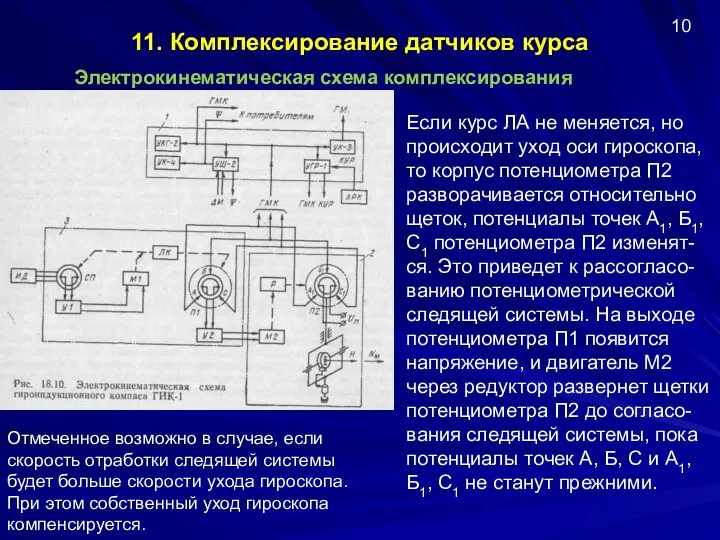
- 13. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 10 Если курс ЛА не меняется, но происходит уход
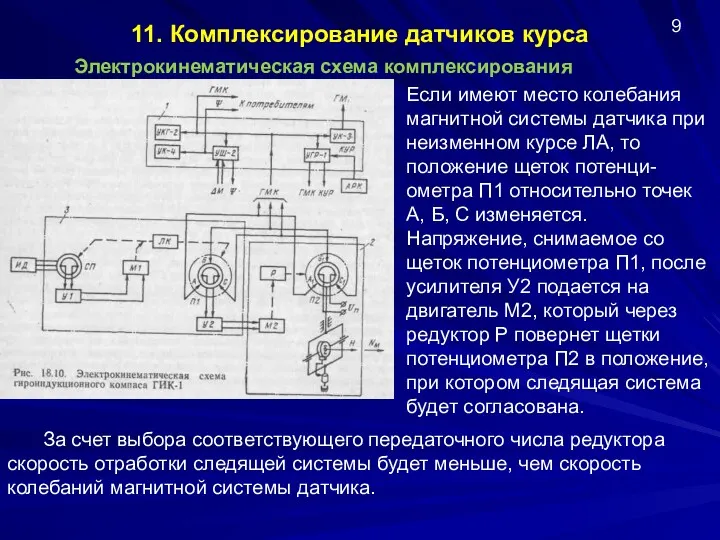
- 14. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 9 Если имеют место колебания магнитной системы датчика при
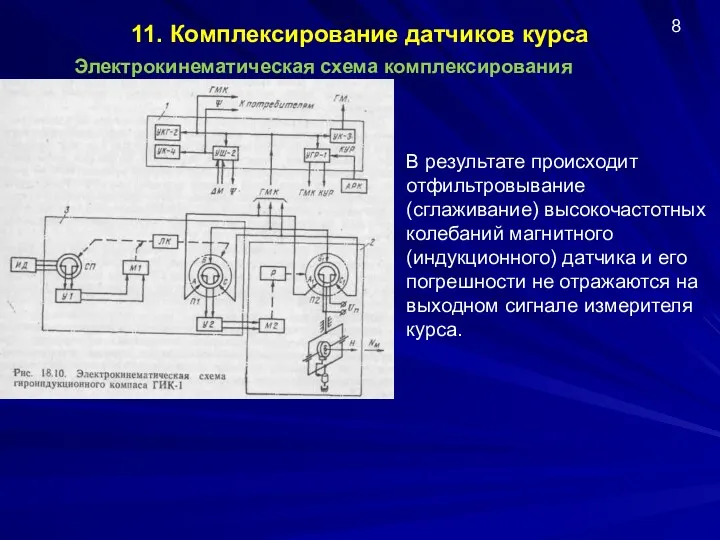
- 15. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 8 В результате происходит отфильтровывание (сглаживание) высокочастотных колебаний магнитного
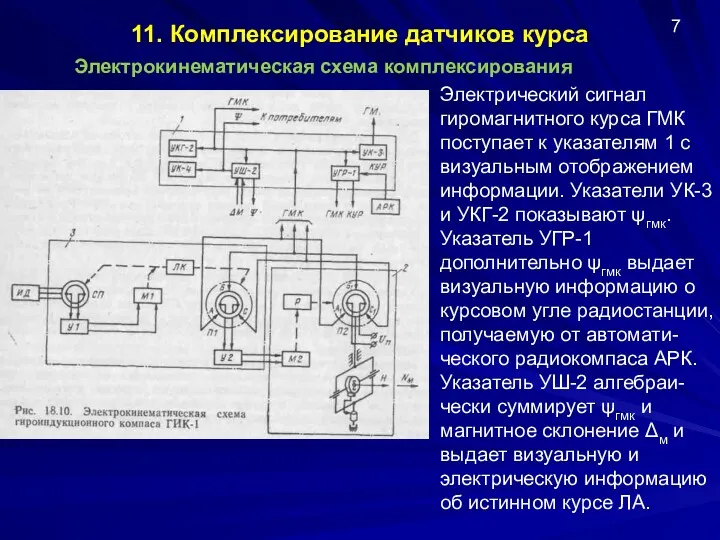
- 16. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 7 Электрический сигнал гиромагнитного курса ГМК поступает к указателям
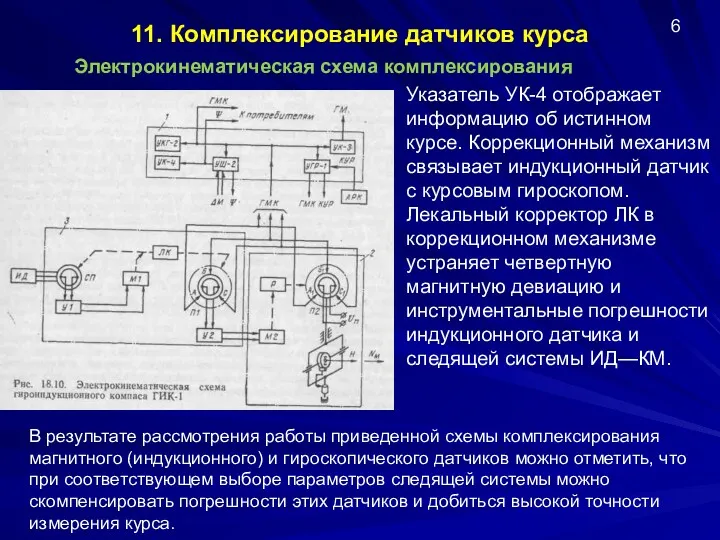
- 17. 11. Комплексирование датчиков курса Электрокинематическая схема комплексирования 6 Указатель УК-4 отображает информацию об истинном курсе. Коррекционный
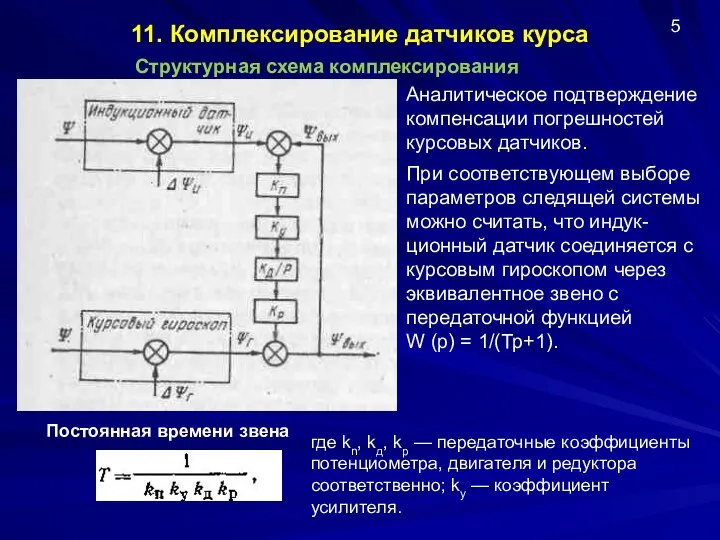
- 18. 11. Комплексирование датчиков курса Структурная схема комплексирования 5 Аналитическое подтверждение компенсации погрешностей курсовых датчиков. При соответствующем
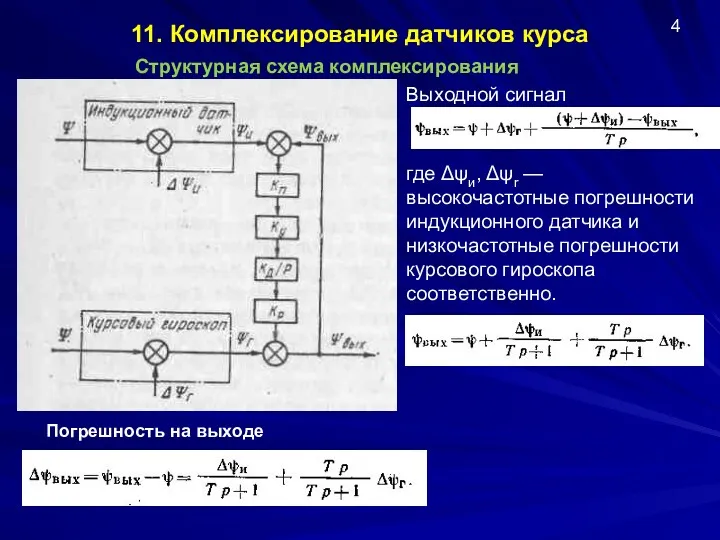
- 19. 11. Комплексирование датчиков курса Структурная схема комплексирования 4 Выходной сигнал где Δψи, Δψr — высокочастотные погрешности
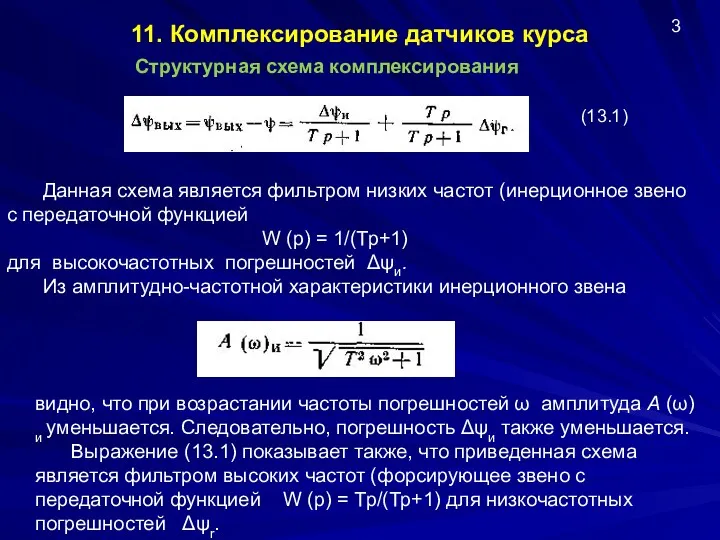
- 20. 11. Комплексирование датчиков курса Структурная схема комплексирования 3 Данная схема является фильтром низких частот (инерционное звено
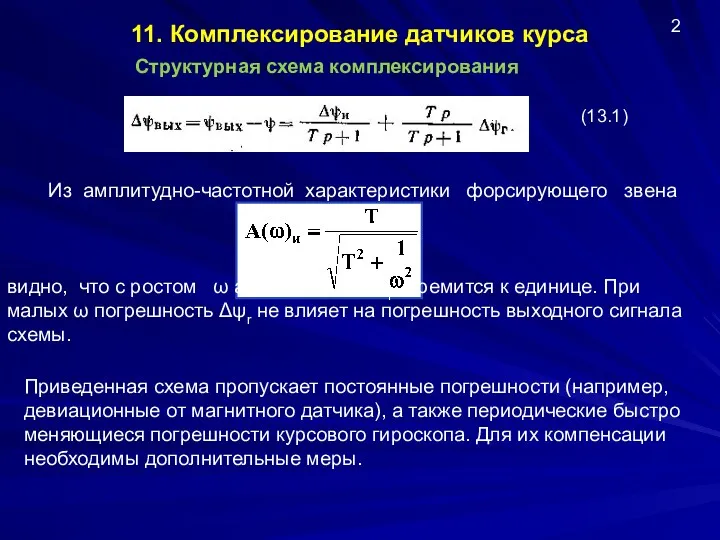
- 21. 11. Комплексирование датчиков курса Структурная схема комплексирования 2 Из амплитудно-частотной характеристики форсирующего звена видно, что с
- 23. Скачать презентацию
10. Недостатки датчиков курса
Основным измерителем курса в курсовых системах
10. Недостатки датчиков курса
Основным измерителем курса в курсовых системах
Недостатки индукционных датчиков курса
Возникают методические погрешности из-за воздействия ускорений
Недостатки индукционных датчиков курса
Возникают методические погрешности из-за воздействия ускорений
Недостатки гироскопических датчиков курса
Гирополукомпасы устойчиво работают независимо от широт, однако
Недостатки гироскопических датчиков курса
Гирополукомпасы устойчиво работают независимо от широт, однако
Недостатки астро - и радиодатчиков
Астродатчики обладают высокой точностью измерения
Недостатки астро - и радиодатчиков
Астродатчики обладают высокой точностью измерения
11. Комплексирование датчиков курса
Анализ недостатков измерителей курса показал, что ни
11. Комплексирование датчиков курса
Анализ недостатков измерителей курса показал, что ни
11. Комплексирование датчиков курса
Для этой цели в общей схеме КС
11. Комплексирование датчиков курса
Для этой цели в общей схеме КС
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
15
Принцип комплексирования на примере простейшего
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
15
Принцип комплексирования на примере простейшего
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
14
Схема состоит из гироагрегата 2,
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
14
Схема состоит из гироагрегата 2,
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
13
Магнитная система индукционного датчика состоит
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
13
Магнитная система индукционного датчика состоит
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
12
Коррекция гироскопа осуществляется с помощью
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
12
Коррекция гироскопа осуществляется с помощью
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
11
При повороте ЛА щетки потенциометра
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
11
При повороте ЛА щетки потенциометра
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
10
Если курс ЛА не меняется,
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
10
Если курс ЛА не меняется,
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
9
Если имеют место колебания магнитной
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
9
Если имеют место колебания магнитной
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
8
В результате происходит отфильтровывание (сглаживание)
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
8
В результате происходит отфильтровывание (сглаживание)
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
7
Электрический сигнал гиромагнитного курса ГМК
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
7
Электрический сигнал гиромагнитного курса ГМК
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
6
Указатель УК-4 отображает информацию об
11. Комплексирование датчиков курса
Электрокинематическая схема комплексирования
6
Указатель УК-4 отображает информацию об
11. Комплексирование датчиков курса
Структурная схема комплексирования
5
Аналитическое подтверждение компенсации погрешностей курсовых
11. Комплексирование датчиков курса
Структурная схема комплексирования
5
Аналитическое подтверждение компенсации погрешностей курсовых
11. Комплексирование датчиков курса
Структурная схема комплексирования
4
Выходной сигнал
где Δψи, Δψr —
11. Комплексирование датчиков курса
Структурная схема комплексирования
4
Выходной сигнал
где Δψи, Δψr —
11. Комплексирование датчиков курса
Структурная схема комплексирования
3
Данная схема является фильтром низких
11. Комплексирование датчиков курса
Структурная схема комплексирования
3
Данная схема является фильтром низких
11. Комплексирование датчиков курса
Структурная схема комплексирования
2
Из амплитудно-частотной характеристики форсирующего
11. Комплексирование датчиков курса
Структурная схема комплексирования
2
Из амплитудно-частотной характеристики форсирующего
 Латинская Америка
Латинская Америка Измерение углов и расстояний на местности различными способами. Выбор ориентиров и целеуказание на местности днём и ночью
Измерение углов и расстояний на местности различными способами. Выбор ориентиров и целеуказание на местности днём и ночью Тропическая Африка и ЮАР
Тропическая Африка и ЮАР Магматические горные породы. Состав магмы и магматических пород
Магматические горные породы. Состав магмы и магматических пород Албания
Албания Алгоритм выполнения заданий 10,11
Алгоритм выполнения заданий 10,11 Королевство Норвеегия
Королевство Норвеегия Вулканы, горячие источники, гейзеры
Вулканы, горячие источники, гейзеры Республика Болгария
Республика Болгария Климат и климатические ресурсы
Климат и климатические ресурсы Особенности административно-территориального устройства России
Особенности административно-территориального устройства России Восточная Сибирь. Величие и суровость природы
Восточная Сибирь. Величие и суровость природы Тихий океан. Индийский океан. Атлантический океан. Северный Ледовитый океан. 7 класс
Тихий океан. Индийский океан. Атлантический океан. Северный Ледовитый океан. 7 класс Почвообразующие породы и почвы Беларуси
Почвообразующие породы и почвы Беларуси Страны мира. 2 класс
Страны мира. 2 класс Регіони світу (за класифікацією ООН). Глобалізація як провідна тенденція розвитку сучасного світу
Регіони світу (за класифікацією ООН). Глобалізація як провідна тенденція розвитку сучасного світу Заповедник Хуанлун
Заповедник Хуанлун Города и сельские поселения Урбанизация
Города и сельские поселения Урбанизация Индия
Индия Туризм в странах Латинской Америки
Туризм в странах Латинской Америки Давление атмосферы. Ветры
Давление атмосферы. Ветры Любытинский район. Туризм
Любытинский район. Туризм Тепло в атмосфере. Температура воздуха
Тепло в атмосфере. Температура воздуха Интеллектуальная игра Знатоки географии (6 класс)
Интеллектуальная игра Знатоки географии (6 класс) Туркменистан
Туркменистан Путешествие на Байкал
Путешествие на Байкал Чорноземи України
Чорноземи України Структуры и текстуры магматических горных пород
Структуры и текстуры магматических горных пород