- Архитектурное проектирование и паттерны программирования

Содержание
- 2. Архитектурное проектирования и паттерны программирования Семестр 16 недель Лекции: 16 часов (1 пара в 2 недели)
- 3. Литература 1. Эрик Фримен и др. Паттерны проектирования 2. Эрих Гамма и др. Паттерны проектирования 3.
- 4. Темы лекций качество ПО (2 часа) базовые паттерны (2 часа) структурные паттерны (4 часа) порождающие паттерны
- 5. Лабораторные работы
- 6. 1 Code review -2 часа 2 Проект системы - первая итерация - 4 часа 3 Делегирование
- 7. Расчетное задание
- 8. Содержание отчета по РЗ 1. Описание предметной области 1.1 Общая характеристика решаемых задач в предметной области
- 9. Тема 0. Качество ПО или зачем менять код, если и так все работает Стив Макконнелл «Совершенный
- 10. О чем будем говорить сегодня? Основные понятия ООП (повторение - залог успеха!) Принципы хорошего кода. SOLID
- 11. Вспомним основные понятия ООП Класс - это комплексный тип данных, элементы которого данные и функции (методы).
- 12. Принципы создания хорошего кода В программе все должно быть прекрасно: и стиль написания кода, и ее
- 13. 1. Соблюдайте единый Code style соблюдайте переносы фигурных скобок и отступы соблюдайте разрядку — ставьте пробелы
- 14. 2. Не используйте «магические числа» (Magic numbers - антипаттерн) Используйте именованные константы, чтобы был понятен смысл
- 15. 3. Используйте осмысленные имена для переменных, функций, классов Если идентификатор - невнятный набор символов, это не
- 16. 4. В начале «внешних» методов проверяйте входные данные будущие пользователи могут вводить любые данные, которые могут
- 17. 5. Реализуйте при помощи наследования только отношение «является». В остальных случаях – композиция Композиция — паттерн
- 18. 6. Отделяйте интерфейс от реализации Используйте заголовочные файлы и файлы реализации при использовании с.С/C++
- 19. 7. Делайте методы компактными и / или разделенными на блоки делайте метод компактным так, чтобы один
- 20. Использовать побитовый сдвиг вместо операций деления и умножения — не лучшая затея Мощный оптимизатор компилятора это
- 21. код пишется в первую очередь для тех, кто будет его сопровождать. Сопровождаемость – легкость использования написанного
- 22. ООП позволяет программистам комбинировать сущности, объединённые общей целью или функционалом, в отдельных классах. Принципы SOLID -
- 23. S: Single Responsibility Principle (Принцип единственной ответственности). Класс должен: - существовать с единственной целью, - решать
- 24. O: Open-Closed Principle (Принцип открытости-закрытости). Программные сущности (классы, модули, функции) должны быть открыты для расширения, но
- 25. L: Liskov Substitution Principle (Принцип подстановки Барбары Лисков). Объекты в программе должны быть заменяемыми на экземпляры
- 26. class Animal {…}; class Horse : public Animal { …}; class Tiger : public Animal {…};
- 27. I: Interface Segregation Principle (Принципразделенияинтерфейса). Клиент не должен зависеть от интерфейсов, которые он не использует. Много
- 28. D: Dependency Inversion Principle (Принцип инверсии зависимостей). Модули верхних уровней не должны зависеть от модулей нижних
- 29. Тема 1. Базовые шаблоны проектирования .
- 30. Зачем? Наверняка вашу задачу или ее аналог кто-то когда-то решал. Опыт других разработчиков надо использовать. Даже
- 31. Почему? В целом паттерны представляют собой некую архитектурную конструкцию, помогающую описать и решить определенную общую задачу
- 32. Для решения каких проблем разработаны паттерны? Оповещать объекты о наступлении событий, причем объекты могут отказаться в
- 33. Что такое GoF и GRASP? «Банда четырёх» в программировании ( Gang of Four, сокращённо GoF) —
- 34. GRASP принципы Polymorphism (Полиморфизм) Low Coupling (Низкая связность) High Cohesion (Высокое зацепление) Protected Variations (Устойчивый к
- 35. Полиморфизм (Polymorphism) Полиморфизм позволяет обрабатывать альтернативные варианты поведения на основе типа и заменять подключаемые компоненты системы.
- 36. Полиморфизм Все альтернативные реализации приводятся к общему интерфейсу Тоже известная штука. Low Coupling или Слабая связанность.
- 37. UML (Unified Modeling Language) Унифицированный язык моделирования Язык UML - это графический язык моделирования общего назначения,
- 38. Диаграмма классов В зависимости от цели выбирается точка зрения, исходя из которой строится диаграмма классов (спецификация,
- 39. Диаграмма классов - отношения Наследование Композиция Агрегация Ассоциация Зависимость Реализация интерфейса д
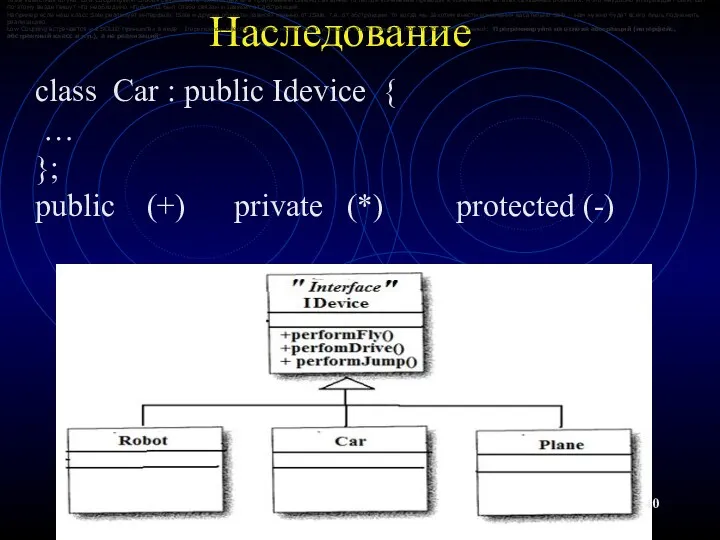
- 40. Наследование class Car : public Idevice { … }; public (+) private (*) protected (-) Тоже
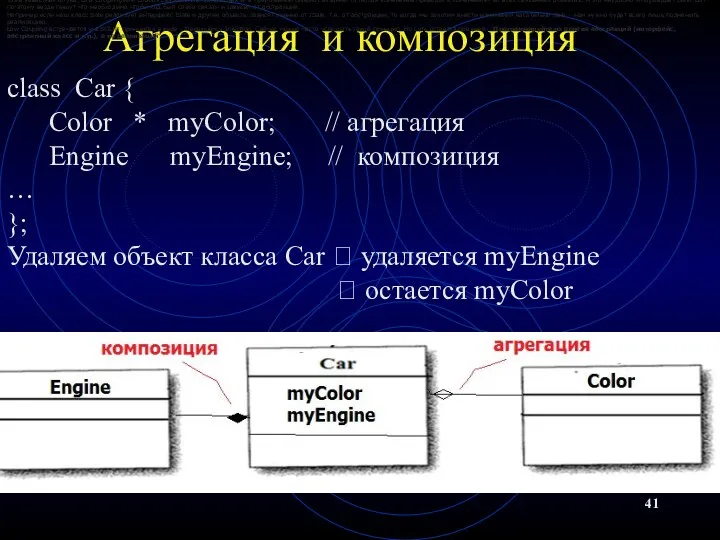
- 41. Агрегация и композиция class Car { Color * myColor; // агрегация Engine myEngine; // композиция …
- 42. Переходим к проблемам проектирования и принципам реализации Как спроектировать объекты, чтобы изменения в объекте не затрагивали
- 43. Низкая связность (Low Coupling) Если объекты в приложении сильно связанны, то любое изменение приводит к изменениям
- 44. Низкая связность (Low Coupling) Вывод: Программируйте на основе абстракций (интерфейс, абстрактный класс и т.п.), а не
- 45. Высокое зацепление (High Cohesion) High Cohesion или высокое зацепление относится к слабой связанности, они идут в
- 46. Высокое зацепление -пример ХОРОШО: Класс Sale (продажа) - все ответственности, которые касаются продаж (вычисление общей суммы
- 47. Высокое зацепление (High Cohesion) - вывод Программируйте так, чтобы один класс имел единственную зону ответственности, и,
- 48. Устойчивый к изменениям (Protected Variations) Суть данного принципа : определить “точки изменений” и зафиксировать их в
- 49. Устойчивый к изменениям (Protected Variations) - вывод Необходимо обеспечить устойчивость интерфейса. Если будет много изменений, связанных
- 50. Что такое паттерны проектирования? Простое определение: «Любой паттерн описывает задачу, которая снова и снова возникает в
- 51. Шаблоны проектирования.
- 52. Базовые шаблоны Delegation и Delegation Event Model Interface и Abstract Superclass Proxy или Surrogate
- 53. Делегирование (Delegation) Задача: Построить игру, в которой есть автомобили. Автомобили умеют передвигаться по земле на колесах.
- 54. Делегирование (Delegation) Наследование как основной принцип создания устройств приводит к огромному количеству разнотипных вариантов. Выход –
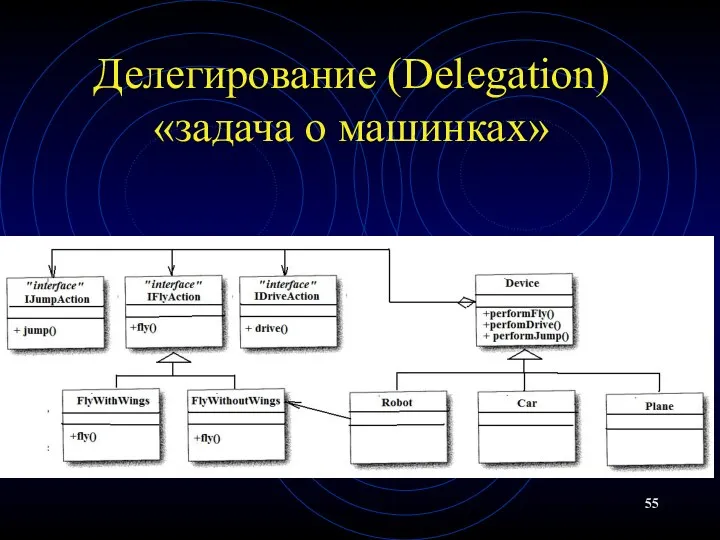
- 55. Делегирование (Delegation) «задача о машинках»
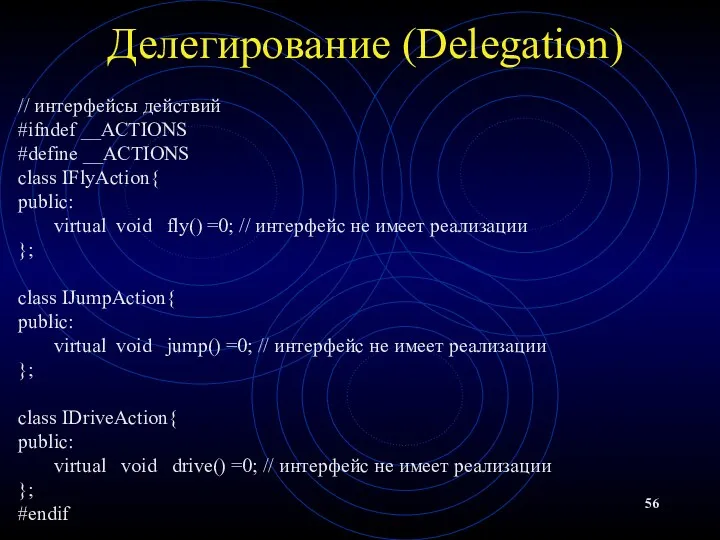
- 56. Делегирование (Delegation) // интерфейсы действий #ifndef __ACTIONS #define __ACTIONS class IFlyAction{ public: virtual void fly() =0;
- 57. Делегирование (Delegation) // классы делегатов #ifndef __BEHAVIOUR #define __BEHAVIOUR #include #include #include "actions.h" //ЛЕТАЕМ //ПРЫГАЕМ …
- 58. Делегирование (Delegation) ////ЛЕТАЕМ class FlyWithWings : public IFlyAction { // класс поведения для устройств, которые умеют
- 59. Делегирование (Delegation) /// ПРЫГАЕМ class JumpWithLegs : public IJumpAction{ // класс поведения для устройств, которые умеют
- 60. Делегирование (Delegation) /// ЕЗДИМ class DriveWithWheels : public IDriveAction{ // класс поведения для устройств на колесах
- 61. Делегирование (Delegation) #ifndef __DEVICE #define __DEVICE #include "behaviour.h" #include "actions.h" class Device{ // абстрактный класс устройства
- 62. Делегирование (Delegation) // конкретный класс «Самолет», который умеет летать и // ездить class Plane : public
- 63. Делегирование (Delegation) // конкретный класс «Автомобиль», который // умеет ездить class Car : public Device{ public:
- 64. Делегирование (Delegation) // конкретный класс «Робот», который умеет прыгать // и медленно передвигаться class Robot :
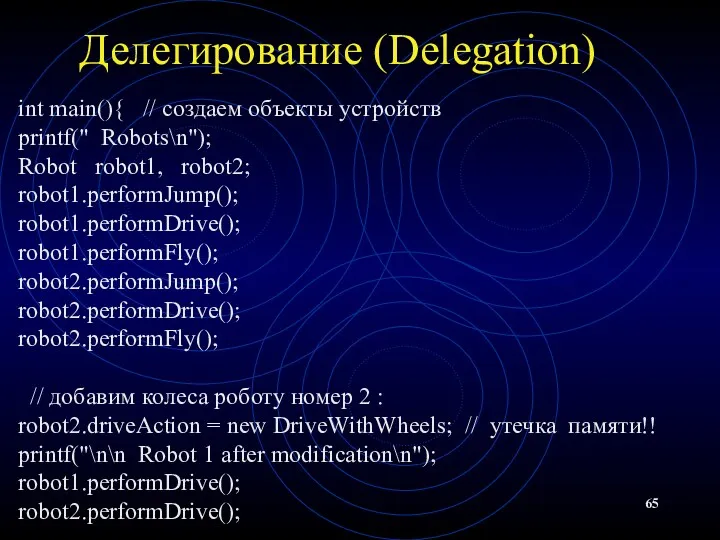
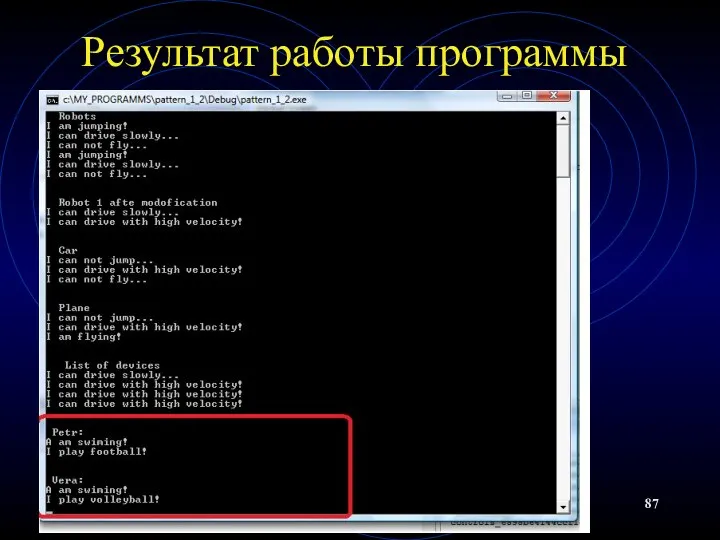
- 65. Делегирование (Delegation) int main(){ // создаем объекты устройств printf(" Robots\n"); Robot robot1, robot2; robot1.performJump(); robot1.performDrive(); robot1.performFly();
- 66. Результат работы программы
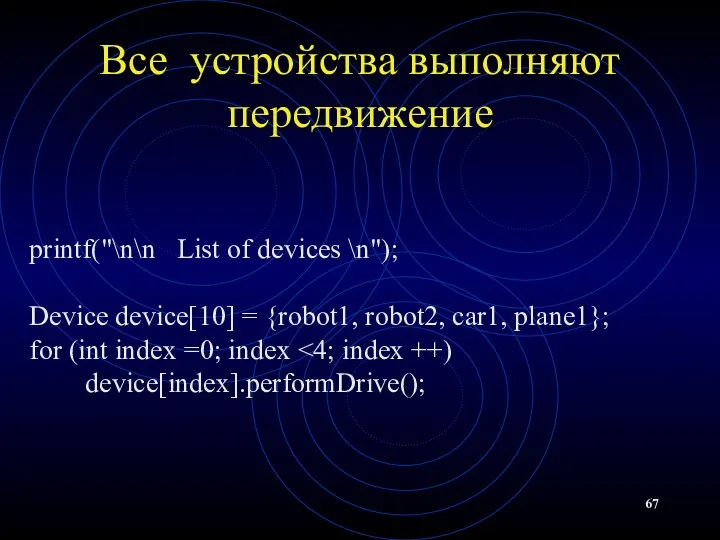
- 67. Все устройства выполняют передвижение printf("\n\n List of devices \n"); Device device[10] = {robot1, robot2, car1, plane1};
- 68. Результат работы программы
- 69. Конфигурирование системы В программе мы создали классы устройств с заранее выбранным типом поведения всех объектов данного
- 70. Конфигурирование объекта Как и ранее, создадим разных делегатов : class DriveFast : public IDriveAction{ void drive(){//
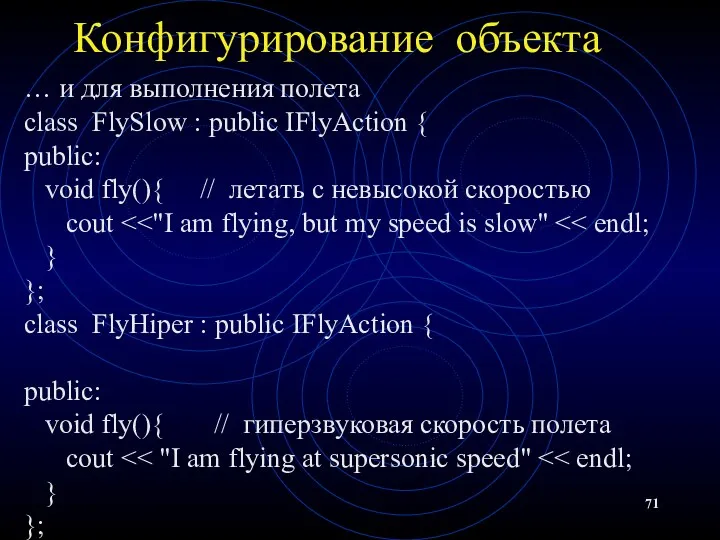
- 71. Конфигурирование объекта … и для выполнения полета class FlySlow : public IFlyAction { public: void fly(){
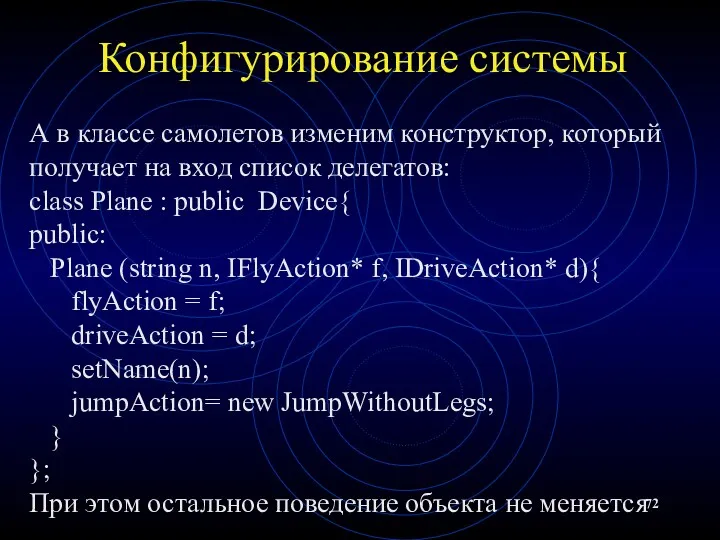
- 72. Конфигурирование системы А в классе самолетов изменим конструктор, который получает на вход список делегатов: class Plane
- 73. Конфигурирование всей системы int main(){ // создаем объекты делегатов FlyHiper * v1 = new FlyHiper(); FlySlow
- 74. Конфигурирование всей системы int main(){ // создаем объекты делегатов FlyHiper * v1 = new FlyHiper(); FlySlow
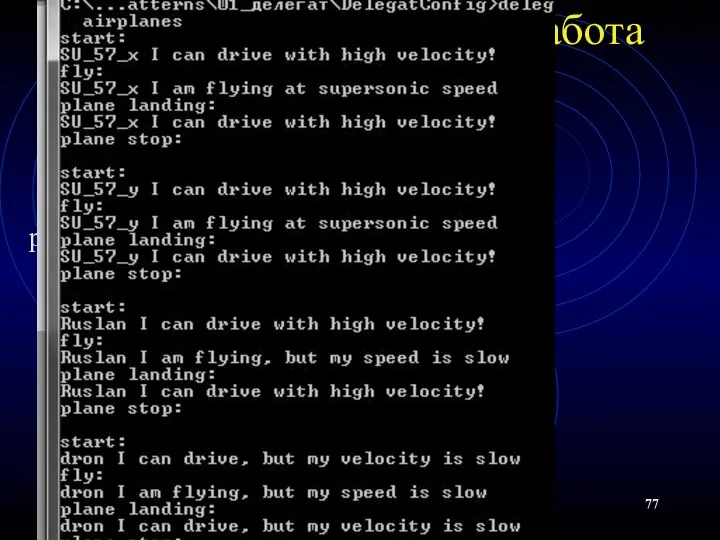
- 75. Конфигурирование системы Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron };
- 76. Конфигурирование системы Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron }; for (int index =0; index cout
- 77. работа рол
- 78. Что и когда делать? А) Нужны - типы классов с разным поведением, - объекты одного класса
- 79. Вариант реализации: создать в классе Device указатели на обработчики с пустым поведением, чтобы при создании устройства
- 80. Задача о множестве действий у одного объекта Задача: Есть несколько видов спорта. Надо построить класс спортсмена,
- 81. Задача о множестве действий у одного объекта
- 82. Список делегатов у объекта // интерфейсы действий #ifndef __MOTION #define __MOTION class IMotion { // интерфейс
- 83. Список делегатов у объекта // конкретные делегаты: class SwimmingMotion : public IMotion { public: void doMotion(){printf("A
- 84. Подписка typedef IMotion * ptrMotion; // класс спортсмен class Sportsmen{ private: vector items; public: void performAllMotions();
- 85. Подписка void perfomAllMotions(){ for (vector ::iterator it = items.begin(); it != items.end(); it++) { (*it)->doMotion(); }
- 86. Подписка Sportsmen * Petr = new Sportsmen(); Sportsmen * Vera = new Sportsmen(); SwimmingMotion *typeSwim =
- 87. Результат работы программы
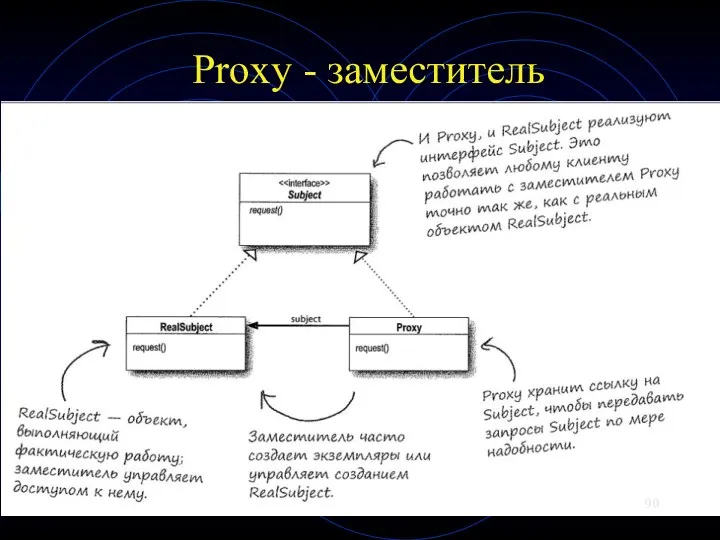
- 88. Proxy – заместитель или Surrogate - суррогат Заместитель – суррогат настоящего объекта. Заместитель прикидывается настоящим объектом,
- 89. Proxy - заместитель Типы заместителей: 1 – удаленный заместитель. При сетевой реализации заместитель действует как представитель
- 90. Proxy - заместитель
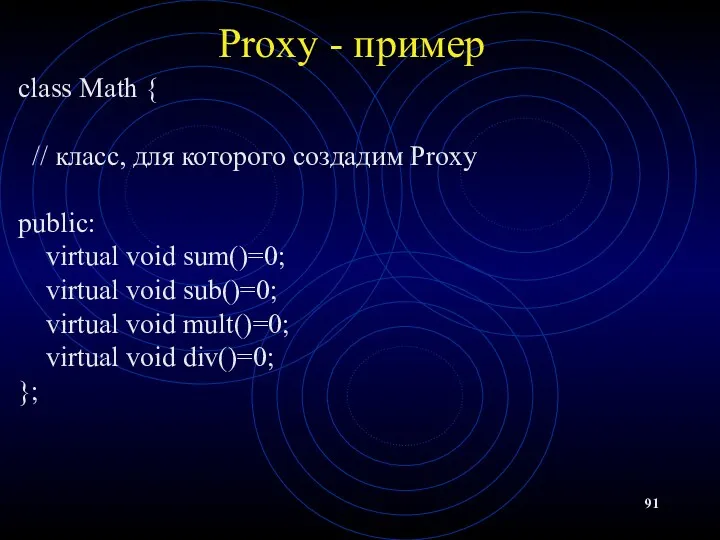
- 91. Proxy - пример class Math { // класс, для которого создадим Proxy public: virtual void sum()=0;
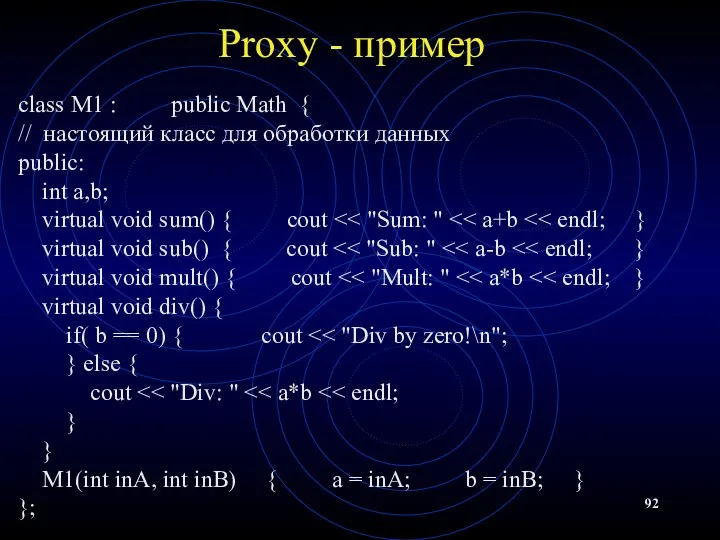
- 92. Proxy - пример class M1 : public Math { // настоящий класс для обработки данных public:
- 93. Proxy - пример class ProxyM1 : public Math { private: M1 *prox; void log() { cout
- 94. Proxy - пример int main(){ Math *t = new M1(6,0); Math *p = new ProxyM1(6,0); cout
- 95. Proxy – работа
- 96. Лабораторные работы № 2, №3 и №4 (первая итерация проекта)
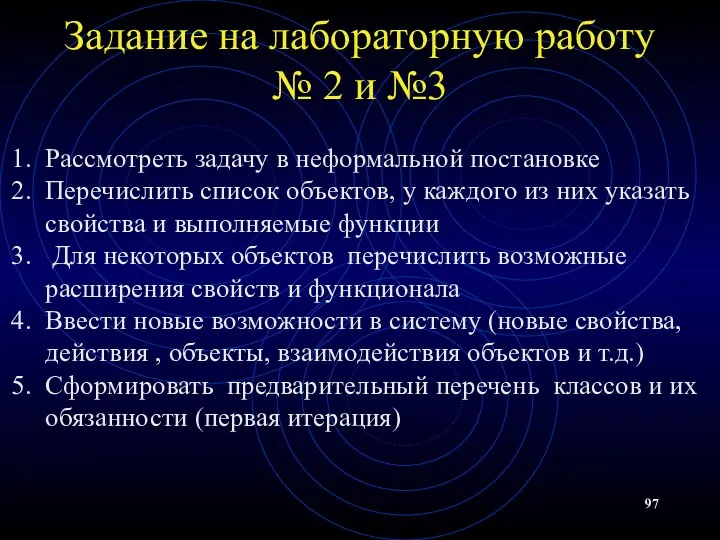
- 97. Задание на лабораторную работу № 2 и №3 Рассмотреть задачу в неформальной постановке Перечислить список объектов,
- 98. Задание на лабораторную работу № 4 Рассмотреть задачу в начальной постановке Предложить реализацию различного поведения объектов
- 99. Пример задания Прикладная область для выполнения лабораторных работ: «Интерактивные головоломки для детей», Тема: Логическая задача «Волк,
- 100. Пример: базовые объекты Лодка: умеет загружать и выгружать пассажиров, перемещаться в заданном направлении. Лодка: может иметь
- 101. Пример: возможные расширения объектов Баба Яга: следит за оставшимися без надзора объектами и планирует их похищение.
- 102. Пример: возможные расширения функционала Лодка: может иметь разный двигатель (от резиновой моторки до атомной подлодки) Перевозимые
- 103. Пример: перечень классов, интерфейсов, объектов Класс "перевозимый объект" IPassenger Конкретные объекты Волк, Коза, Капуста, ... Класс
- 104. Пример: перечень классов, интерфейсов, объектов Класс "мотор транспортного средства" - IEngine Классы-нвследники: ручная тяга, двигатель, ...
- 105. Пример: отношения между классами ITransport --- композиция ----> IEngine IDriver --- композиция ----> ITransport IState ---
- 106. Пример: простая реализация лабораторной работы №4 (делегирование и proxy) Для выполнения задания по теме "Делегирование" реализуем
- 107. Пример: простая реализация - делегирование 1) IDriver делегирует ITransport - действие "загрузить транспортное средство" - действие
- 108. Пример: простая реализация proxy Введем в систему защитного заместителя Proxy для контроля доступности и безопасности нового
- 109. Примеры задач Система управления и мониторинга грузоперевозками Система бронирования билетов на театрально-зрелищные представления Система управления режимом
- 110. Замечания к реализации (решение проблемы с параметрами разных типов)
- 111. Замечания к реализации Иногда возникает необходимость реализовать класс-делегат, который содержит несколько функций с разным списком параметров.
- 112. Физические данные // эти данные будут в качестве параметров команд // собрали данные в структуры struct
- 113. Абстрактный класс параметров class param{ public: void * data; virtual void *getParam() = 0; virtual void
- 114. Конкретные параметры - concrParam_1 Создадим параметры, содержащие данные типа str_1 class concrParam_1 : public param{ //
- 115. Конкретные параметры - concrParam_2 Аналогично создадим другой класс параметров class concrParam_2 : public param{ // параметры
- 116. Абстрактный класс роботов // Теперь можем создавать любые классы, функции которых // имеют параметры созданного абстрактного
- 117. Конкретный робот class robot_1 : public robot { // У него параметры concrParam_1 public: void doWork(param
- 118. Теперь нет проблем с вызовом функций int main(){ robot * r1 = new robot_1(); // функции
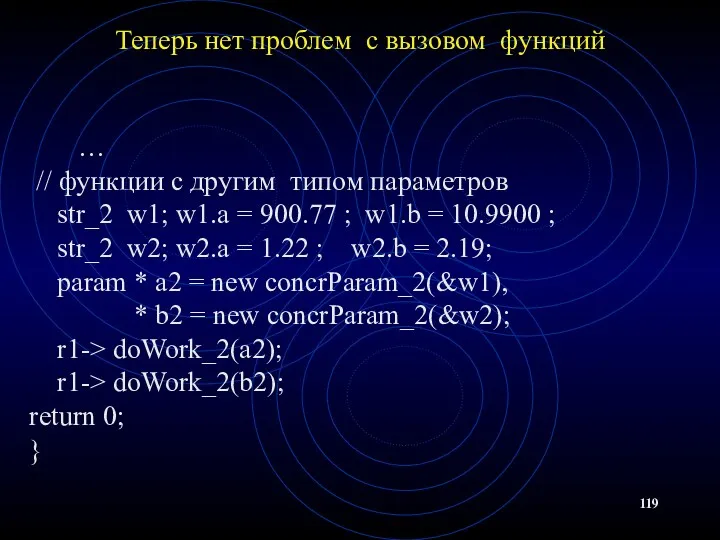
- 119. Теперь нет проблем с вызовом функций … // функции с другим типом параметров str_2 w1; w1.a
- 120. Все работает! У первой функции первый параметр имел тип str_1, функция выводила его первое поле типа
- 122. Скачать презентацию
Архитектурное проектирования и паттерны программирования
Семестр 16 недель
Лекции: 16 часов (1
Архитектурное проектирования и паттерны программирования
Семестр 16 недель Лекции: 16 часов (1
Литература 1. Эрик Фримен и др. Паттерны проектирования
2. Эрих Гамма и
Литература 1. Эрик Фримен и др. Паттерны проектирования 2. Эрих Гамма и
Темы лекций
качество ПО (2 часа)
базовые паттерны (2 часа)
структурные паттерны
Темы лекций
качество ПО (2 часа)
базовые паттерны (2 часа)
структурные паттерны
Лабораторные работы
Лабораторные работы

1 Code review -2 часа
2 Проект системы - первая итерация -
1 Code review -2 часа 2 Проект системы - первая итерация -
Расчетное задание
Расчетное задание

Содержание отчета по РЗ
1. Описание предметной области 1.1 Общая характеристика решаемых
Содержание отчета по РЗ 1. Описание предметной области 1.1 Общая характеристика решаемых
Тема 0. Качество ПО
или
зачем менять код, если и так
Тема 0. Качество ПО или зачем менять код, если и так
О чем будем говорить сегодня?
Основные понятия ООП (повторение - залог успеха!)
Принципы
О чем будем говорить сегодня?
Основные понятия ООП (повторение - залог успеха!)
Принципы

Вспомним основные понятия ООП
Класс - это комплексный тип данных, элементы которого
Вспомним основные понятия ООП
Класс - это комплексный тип данных, элементы которого
Принципы создания хорошего кода
В программе все должно быть прекрасно:
и стиль
Принципы создания хорошего кода
В программе все должно быть прекрасно:
и стиль
1. Соблюдайте единый Code style
соблюдайте переносы фигурных скобок и отступы
соблюдайте разрядку
1. Соблюдайте единый Code style
соблюдайте переносы фигурных скобок и отступы
соблюдайте разрядку
2. Не используйте «магические числа»
(Magic numbers - антипаттерн)
Используйте именованные константы,
2. Не используйте «магические числа»
(Magic numbers - антипаттерн)
Используйте именованные константы,
3. Используйте осмысленные имена для переменных, функций, классов
Если идентификатор - невнятный
3. Используйте осмысленные имена для переменных, функций, классов
Если идентификатор - невнятный
4. В начале «внешних» методов проверяйте входные данные
будущие пользователи могут вводить
4. В начале «внешних» методов проверяйте входные данные
будущие пользователи могут вводить

5. Реализуйте при помощи наследования только отношение «является». В остальных случаях
5. Реализуйте при помощи наследования только отношение «является». В остальных случаях
6. Отделяйте интерфейс от реализации
Используйте заголовочные файлы и файлы реализации при
6. Отделяйте интерфейс от реализации
Используйте заголовочные файлы и файлы реализации при

7. Делайте методы компактными и / или разделенными на блоки
делайте метод
7. Делайте методы компактными и / или разделенными на блоки
делайте метод
Использовать побитовый сдвиг вместо операций деления и умножения — не лучшая
Использовать побитовый сдвиг вместо операций деления и умножения — не лучшая

код пишется в первую очередь для тех, кто будет его сопровождать.
код пишется в первую очередь для тех, кто будет его сопровождать.

ООП позволяет программистам комбинировать сущности, объединённые общей целью или функционалом, в
ООП позволяет программистам комбинировать сущности, объединённые общей целью или функционалом, в
S: Single Responsibility Principle (Принцип единственной ответственности).
Класс должен:
- существовать
S: Single Responsibility Principle (Принцип единственной ответственности).
Класс должен:
- существовать

O: Open-Closed Principle (Принцип открытости-закрытости).
Программные сущности (классы, модули, функции) должны
O: Open-Closed Principle (Принцип открытости-закрытости).
Программные сущности (классы, модули, функции) должны

L: Liskov Substitution Principle (Принцип подстановки Барбары Лисков).
Объекты в программе должны
L: Liskov Substitution Principle (Принцип подстановки Барбары Лисков).
Объекты в программе должны
class Animal {…};
class Horse : public Animal { …};
class Tiger :
class Animal {…};
class Horse : public Animal { …};
class Tiger :

I: Interface Segregation Principle (Принципразделенияинтерфейса).
Клиент не должен зависеть от интерфейсов, которые
I: Interface Segregation Principle (Принципразделенияинтерфейса).
Клиент не должен зависеть от интерфейсов, которые
D: Dependency Inversion Principle (Принцип инверсии зависимостей).
Модули верхних уровней не должны
D: Dependency Inversion Principle (Принцип инверсии зависимостей).
Модули верхних уровней не должны

Тема 1. Базовые шаблоны проектирования
.
Тема 1. Базовые шаблоны проектирования
.
Зачем?
Наверняка вашу задачу или ее аналог кто-то когда-то решал. Опыт других
Зачем?
Наверняка вашу задачу или ее аналог кто-то когда-то решал. Опыт других

Почему?
В целом паттерны представляют собой некую архитектурную конструкцию, помогающую описать и
Почему?
В целом паттерны представляют собой некую архитектурную конструкцию, помогающую описать и

Для решения каких проблем разработаны паттерны?
Оповещать объекты о наступлении событий, причем
Для решения каких проблем разработаны паттерны?
Оповещать объекты о наступлении событий, причем

Что такое GoF и GRASP?
«Банда четырёх» в программировании ( Gang of Four,
Что такое GoF и GRASP?
«Банда четырёх» в программировании ( Gang of Four,

GRASP
принципы
Polymorphism (Полиморфизм)
Low Coupling (Низкая связность)
High Cohesion (Высокое зацепление)
Protected Variations (Устойчивый к
GRASP
принципы
Polymorphism (Полиморфизм)
Low Coupling (Низкая связность)
High Cohesion (Высокое зацепление)
Protected Variations (Устойчивый к
Полиморфизм
(Polymorphism)
Полиморфизм позволяет обрабатывать альтернативные варианты поведения на основе типа и заменять подключаемые
Полиморфизм
(Polymorphism)
Полиморфизм позволяет обрабатывать альтернативные варианты поведения на основе типа и заменять подключаемые

Полиморфизм
Все альтернативные реализации приводятся к общему интерфейсу
Тоже известная штука. Low Coupling
Полиморфизм
Все альтернативные реализации приводятся к общему интерфейсу
Тоже известная штука. Low Coupling
UML (Unified Modeling Language)
Унифицированный язык моделирования
Язык UML - это графический
UML (Unified Modeling Language)
Унифицированный язык моделирования
Язык UML - это графический
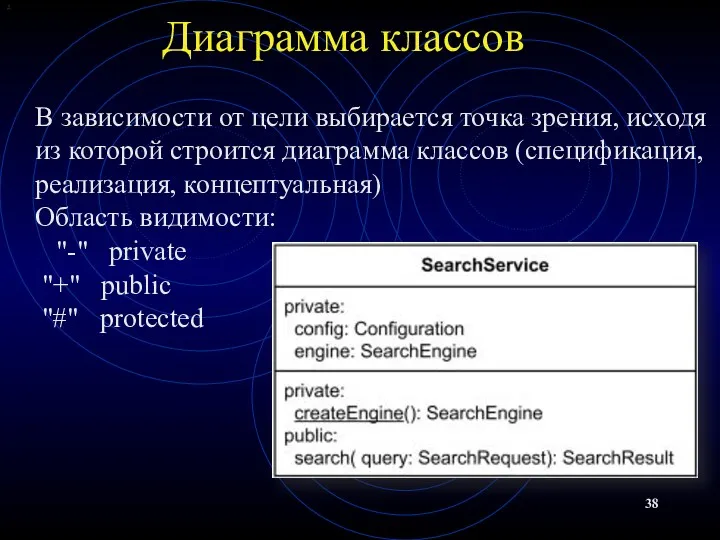
Диаграмма классов
В зависимости от цели выбирается точка зрения, исходя из которой
Диаграмма классов
В зависимости от цели выбирается точка зрения, исходя из которой
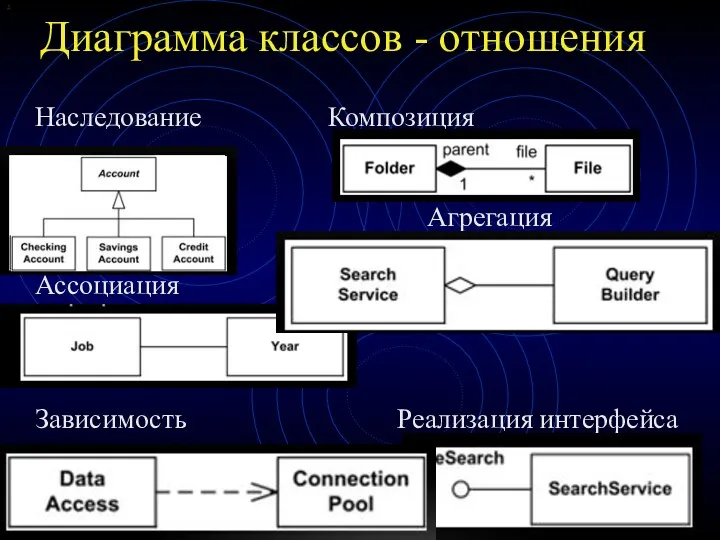
Диаграмма классов - отношения
Наследование Композиция
Агрегация
Ассоциация
Зависимость Реализация интерфейса
д
Диаграмма классов - отношения
Наследование Композиция
Агрегация
Ассоциация
Зависимость Реализация интерфейса
д
Наследование
class Car : public Idevice {
…
};
public (+) private (*)
Наследование
class Car : public Idevice {
…
};
public (+) private (*)
Агрегация и композиция
class Car {
Color * myColor; // агрегация
Агрегация и композиция
class Car {
Color * myColor; // агрегация

Переходим к проблемам проектирования и принципам реализации
Как спроектировать объекты, чтобы изменения
Переходим к проблемам проектирования и принципам реализации
Как спроектировать объекты, чтобы изменения
Низкая связность (Low Coupling)
Если объекты в приложении сильно связанны, то любое
Низкая связность (Low Coupling)
Если объекты в приложении сильно связанны, то любое

Низкая связность (Low Coupling)
Вывод:
Программируйте на основе абстракций (интерфейс, абстрактный класс
Низкая связность (Low Coupling)
Вывод:
Программируйте на основе абстракций (интерфейс, абстрактный класс
Высокое зацепление
(High Cohesion)
High Cohesion или высокое зацепление относится к слабой
Высокое зацепление
(High Cohesion)
High Cohesion или высокое зацепление относится к слабой

Высокое зацепление -пример
ХОРОШО:
Класс Sale (продажа) - все ответственности, которые касаются продаж
Высокое зацепление -пример
ХОРОШО:
Класс Sale (продажа) - все ответственности, которые касаются продаж
Высокое зацепление
(High Cohesion)
- вывод
Программируйте так, чтобы один класс имел
Высокое зацепление
(High Cohesion)
- вывод
Программируйте так, чтобы один класс имел

Устойчивый к изменениям
(Protected Variations)
Суть данного принципа : определить “точки изменений”
Устойчивый к изменениям
(Protected Variations)
Суть данного принципа : определить “точки изменений”
Устойчивый к изменениям
(Protected Variations)
- вывод
Необходимо обеспечить устойчивость интерфейса.
Если будет
Устойчивый к изменениям
(Protected Variations)
- вывод
Необходимо обеспечить устойчивость интерфейса.
Если будет
Что такое паттерны проектирования?
Простое определение:
«Любой паттерн описывает задачу, которая снова и
Что такое паттерны проектирования?
Простое определение:
«Любой паттерн описывает задачу, которая снова и

Шаблоны проектирования.
Шаблоны проектирования.

Базовые шаблоны
Delegation и Delegation Event Model
Interface и Abstract Superclass
Proxy или Surrogate
Базовые шаблоны
Delegation и Delegation Event Model
Interface и Abstract Superclass
Proxy или Surrogate
Делегирование (Delegation)
Задача:
Построить игру, в которой есть автомобили. Автомобили умеют передвигаться
Делегирование (Delegation)
Задача:
Построить игру, в которой есть автомобили. Автомобили умеют передвигаться

Делегирование (Delegation)
Наследование как основной принцип создания устройств приводит к огромному количеству
Делегирование (Delegation)
Наследование как основной принцип создания устройств приводит к огромному количеству
Делегирование (Delegation)
«задача о машинках»
Делегирование (Delegation)
«задача о машинках»
Делегирование (Delegation)
// интерфейсы действий
#ifndef __ACTIONS
#define __ACTIONS
class IFlyAction{
public:
virtual void fly() =0; //
Делегирование (Delegation)
// интерфейсы действий
#ifndef __ACTIONS
#define __ACTIONS
class IFlyAction{
public:
virtual void fly() =0; //
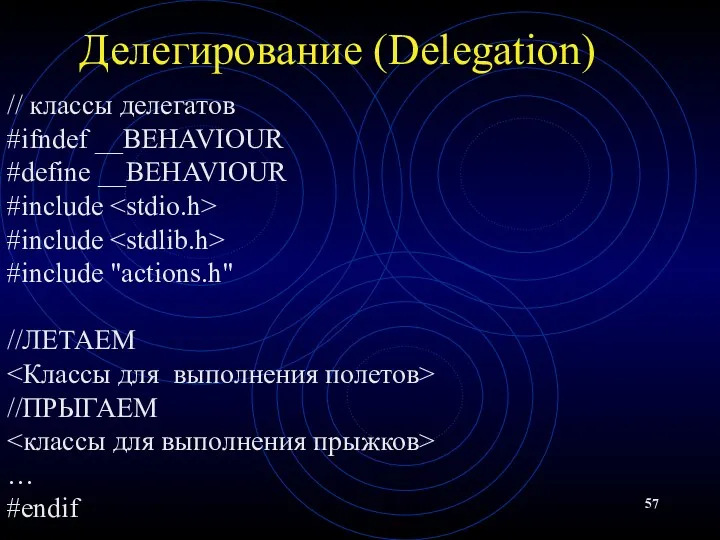
Делегирование (Delegation)
// классы делегатов
#ifndef __BEHAVIOUR
#define __BEHAVIOUR
#include
#include
#include "actions.h"
//ЛЕТАЕМ
<Классы для выполнения
Делегирование (Delegation)
// классы делегатов
#ifndef __BEHAVIOUR
#define __BEHAVIOUR
#include
#include
#include "actions.h"
//ЛЕТАЕМ
<Классы для выполнения
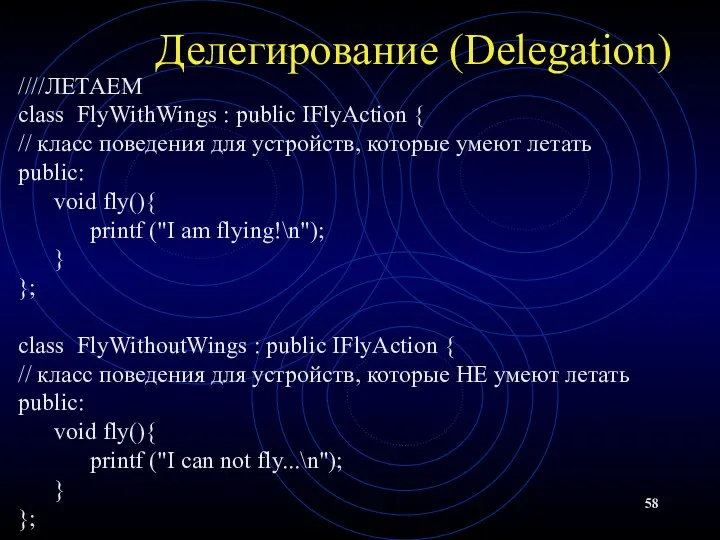
Делегирование (Delegation)
////ЛЕТАЕМ
class FlyWithWings : public IFlyAction {
// класс поведения для
Делегирование (Delegation)
////ЛЕТАЕМ
class FlyWithWings : public IFlyAction {
// класс поведения для

Делегирование (Delegation)
/// ПРЫГАЕМ
class JumpWithLegs : public IJumpAction{
// класс
Делегирование (Delegation)
/// ПРЫГАЕМ
class JumpWithLegs : public IJumpAction{
// класс
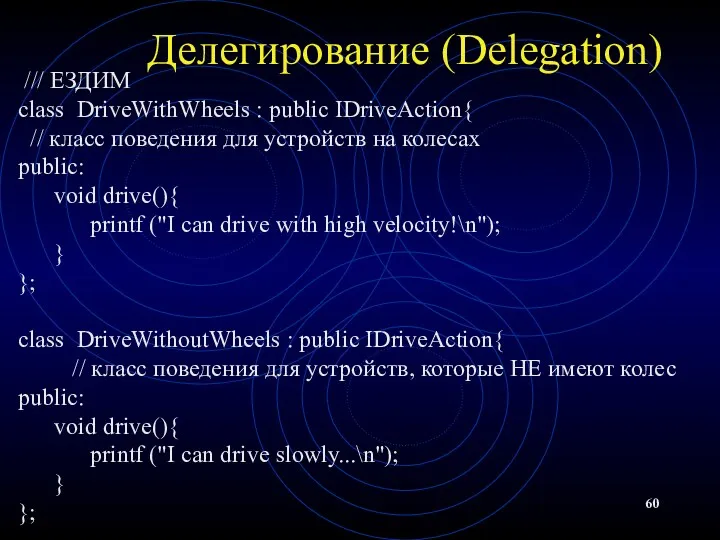
Делегирование (Delegation)
/// ЕЗДИМ
class DriveWithWheels : public IDriveAction{
// класс
Делегирование (Delegation)
/// ЕЗДИМ
class DriveWithWheels : public IDriveAction{
// класс
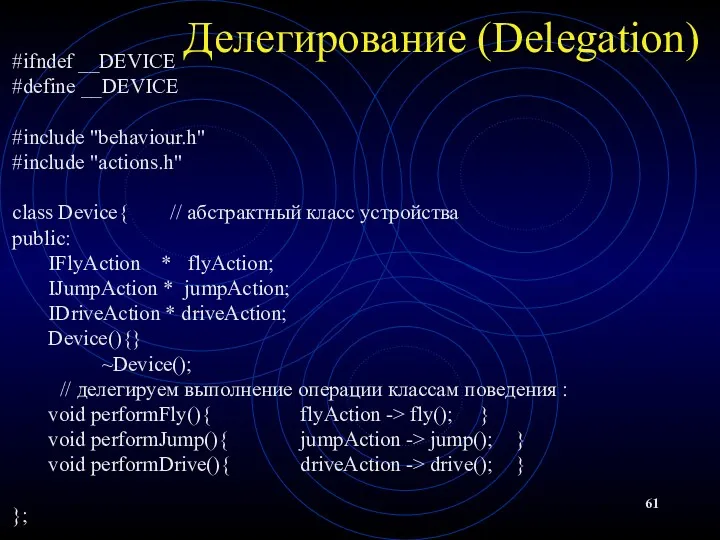
Делегирование (Delegation)
#ifndef __DEVICE
#define __DEVICE
#include "behaviour.h"
#include "actions.h"
class Device{ // абстрактный класс устройства
public:
Делегирование (Delegation)
#ifndef __DEVICE
#define __DEVICE
#include "behaviour.h"
#include "actions.h"
class Device{ // абстрактный класс устройства
public:

Делегирование (Delegation)
// конкретный класс «Самолет», который умеет летать и // ездить
class
Делегирование (Delegation)
// конкретный класс «Самолет», который умеет летать и // ездить
class

Делегирование (Delegation)
// конкретный класс «Автомобиль», который
// умеет ездить
class Car :
Делегирование (Delegation)
// конкретный класс «Автомобиль», который
// умеет ездить
class Car :

Делегирование (Delegation)
// конкретный класс «Робот», который умеет прыгать
// и медленно
Делегирование (Delegation)
// конкретный класс «Робот», который умеет прыгать
// и медленно
Делегирование (Delegation)
int main(){ // создаем объекты устройств
printf(" Robots\n");
Robot robot1, robot2;
robot1.performJump();
robot1.performDrive();
robot1.performFly();
robot2.performJump();
robot2.performDrive();
robot2.performFly();
//
Делегирование (Delegation)
int main(){ // создаем объекты устройств
printf(" Robots\n");
Robot robot1, robot2;
robot1.performJump();
robot1.performDrive();
robot1.performFly();
robot2.performJump();
robot2.performDrive();
robot2.performFly();
//

Результат работы программы
Результат работы программы
Все устройства выполняют передвижение
printf("\n\n List of devices \n");
Device device[10] = {robot1,
Все устройства выполняют передвижение
printf("\n\n List of devices \n");
Device device[10] = {robot1,

Результат работы программы
Результат работы программы

Конфигурирование системы
В программе мы создали классы устройств с заранее выбранным типом
Конфигурирование системы
В программе мы создали классы устройств с заранее выбранным типом

Конфигурирование объекта
Как и ранее, создадим разных делегатов :
class DriveFast : public
Конфигурирование объекта
Как и ранее, создадим разных делегатов :
class DriveFast : public
Конфигурирование объекта
… и для выполнения полета
class FlySlow : public IFlyAction {
Конфигурирование объекта
… и для выполнения полета
class FlySlow : public IFlyAction {
Конфигурирование системы
А в классе самолетов изменим конструктор, который получает на вход
Конфигурирование системы
А в классе самолетов изменим конструктор, который получает на вход

Конфигурирование всей системы
int main(){ // создаем объекты делегатов
FlyHiper * v1
Конфигурирование всей системы
int main(){ // создаем объекты делегатов
FlyHiper * v1

Конфигурирование всей системы
int main(){ // создаем объекты делегатов
FlyHiper * v1 =
Конфигурирование всей системы
int main(){ // создаем объекты делегатов
FlyHiper * v1 =
![Конфигурирование системы Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron };](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/597248/slide-74.jpg)
Конфигурирование системы
Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron };
Конфигурирование системы
Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron };
![Конфигурирование системы Device* device[10] = {SU_57_x, SU_57_y, Ruslan, dron };](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/597248/slide-75.jpg)
Конфигурирование системы
Device* device[10] =
{SU_57_x, SU_57_y, Ruslan, dron };
for
Конфигурирование системы
Device* device[10] =
{SU_57_x, SU_57_y, Ruslan, dron };
for
работа
рол
работа
рол
Что и когда делать?
А) Нужны
- типы классов с разным
Что и когда делать?
А) Нужны
- типы классов с разным
Вариант реализации:
создать в классе Device указатели на обработчики с пустым
Вариант реализации: создать в классе Device указатели на обработчики с пустым
Задача о множестве действий у одного объекта
Задача:
Есть несколько видов спорта. Надо
Задача о множестве действий у одного объекта
Задача:
Есть несколько видов спорта. Надо

Задача о множестве действий у одного объекта
Задача о множестве действий у одного объекта
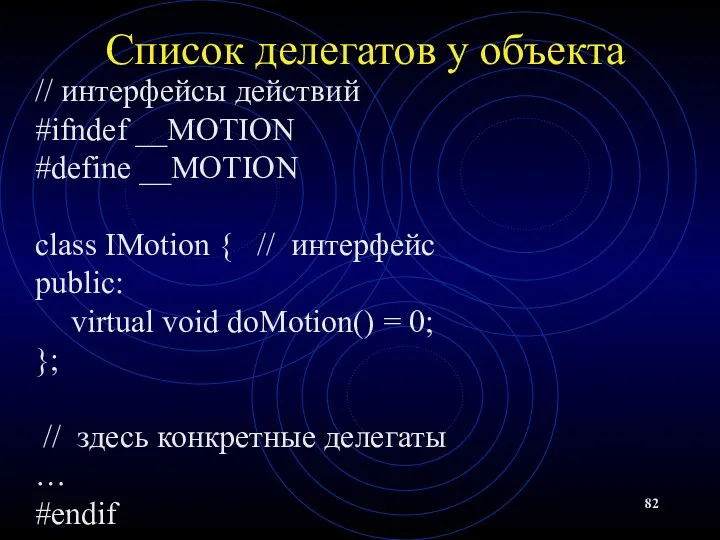
Список делегатов у объекта
// интерфейсы действий
#ifndef __MOTION
#define __MOTION
class IMotion { //
Список делегатов у объекта
// интерфейсы действий
#ifndef __MOTION
#define __MOTION
class IMotion { //
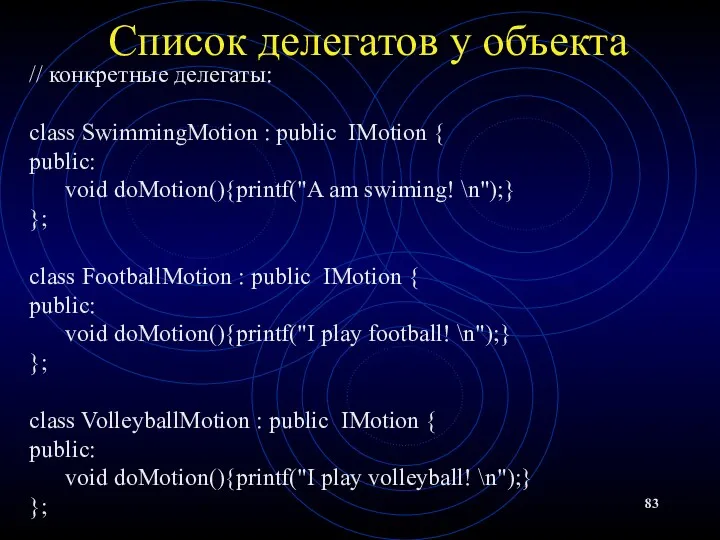
Список делегатов у объекта
// конкретные делегаты:
class SwimmingMotion : public IMotion {
public:
void
Список делегатов у объекта
// конкретные делегаты:
class SwimmingMotion : public IMotion {
public:
void
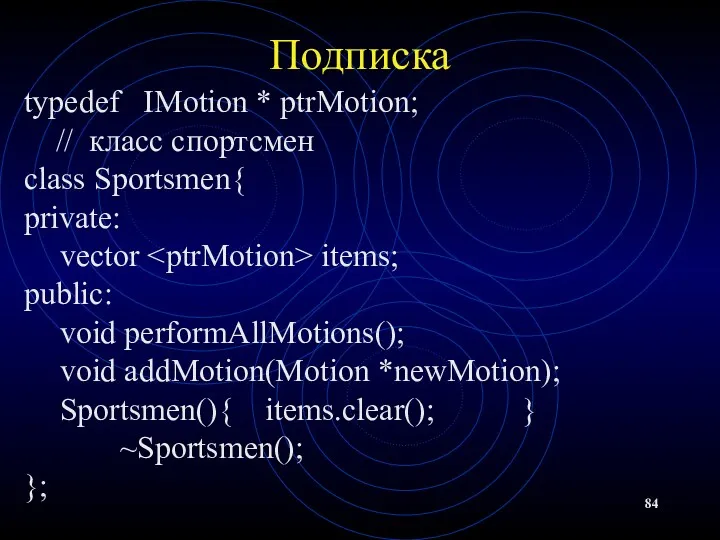
Подписка
typedef IMotion * ptrMotion;
// класс спортсмен
class Sportsmen{
private:
vector items;
public:
void
Подписка
typedef IMotion * ptrMotion;
// класс спортсмен
class Sportsmen{
private:
vector
public:
void
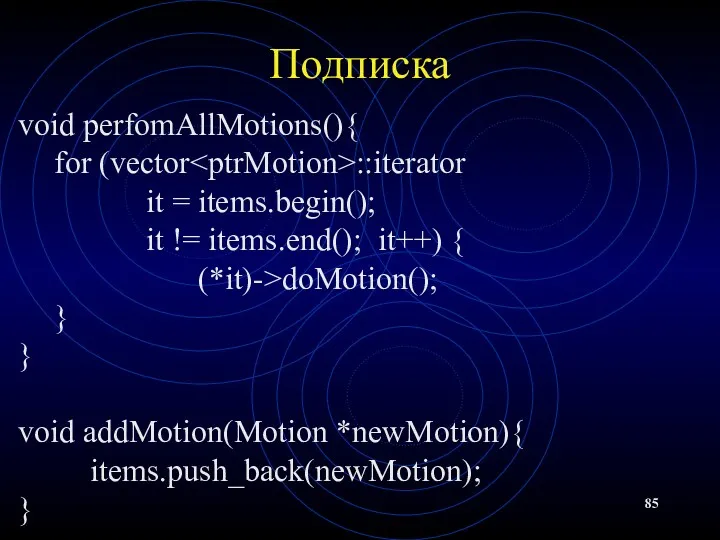
Подписка
void perfomAllMotions(){
for (vector::iterator
it = items.begin();
it !=
Подписка
void perfomAllMotions(){
for (vector
it = items.begin();
it !=

Подписка
Sportsmen * Petr = new Sportsmen();
Sportsmen * Vera = new
Подписка
Sportsmen * Petr = new Sportsmen();
Sportsmen * Vera = new
Результат работы программы
Результат работы программы

Proxy – заместитель
или Surrogate - суррогат
Заместитель – суррогат настоящего
Proxy – заместитель
или Surrogate - суррогат
Заместитель – суррогат настоящего

Proxy - заместитель
Типы заместителей:
1 – удаленный заместитель. При сетевой реализации заместитель
Proxy - заместитель
Типы заместителей:
1 – удаленный заместитель. При сетевой реализации заместитель
Proxy - заместитель
Proxy - заместитель
Proxy - пример
class Math {
// класс, для которого создадим
Proxy - пример
class Math {
// класс, для которого создадим
Proxy - пример
class M1 : public Math {
// настоящий класс для
Proxy - пример
class M1 : public Math {
// настоящий класс для

Proxy - пример
class ProxyM1 : public Math {
private:
M1 *prox;
void
Proxy - пример
class ProxyM1 : public Math {
private:
M1 *prox;
void
Proxy - пример
int main(){
Math *t = new M1(6,0);
Math *p
Proxy - пример
int main(){
Math *t = new M1(6,0);
Math *p

Proxy – работа
Proxy – работа

Лабораторные работы
№ 2, №3 и №4
(первая итерация проекта)
Лабораторные работы
№ 2, №3 и №4
(первая итерация проекта)
Задание на лабораторную работу
№ 2 и №3
Рассмотреть задачу в
Задание на лабораторную работу
№ 2 и №3
Рассмотреть задачу в
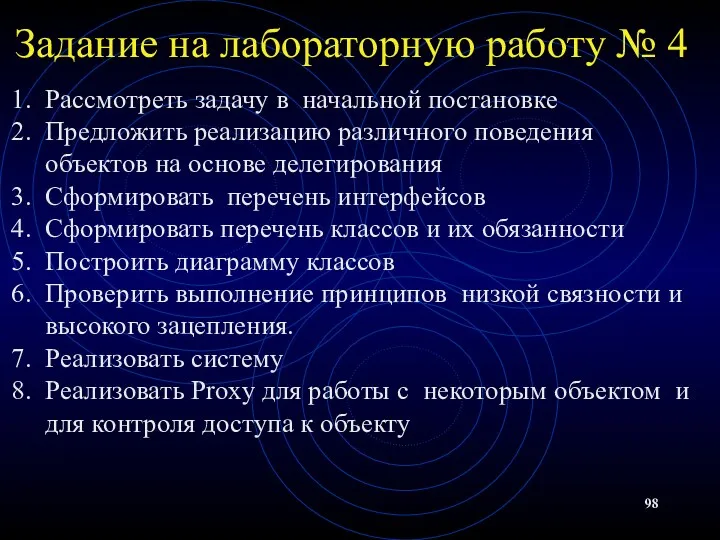
Задание на лабораторную работу № 4
Рассмотреть задачу в начальной постановке
Предложить реализацию
Задание на лабораторную работу № 4
Рассмотреть задачу в начальной постановке
Предложить реализацию

Пример задания
Прикладная область для выполнения лабораторных работ: «Интерактивные головоломки для
Пример задания
Прикладная область для выполнения лабораторных работ: «Интерактивные головоломки для
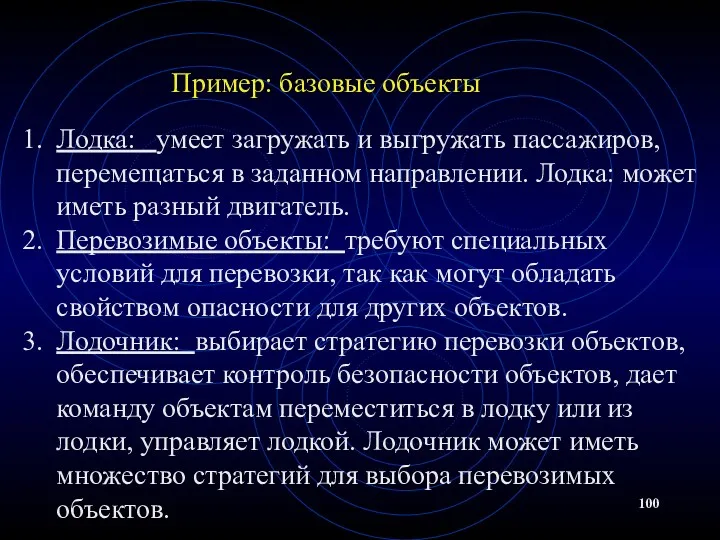
Пример: базовые объекты
Лодка: умеет загружать и выгружать пассажиров, перемещаться в
Пример: базовые объекты
Лодка: умеет загружать и выгружать пассажиров, перемещаться в
Пример: возможные расширения объектов
Баба Яга: следит за оставшимися без надзора
Пример: возможные расширения объектов
Баба Яга: следит за оставшимися без надзора

Пример: возможные расширения функционала
Лодка: может иметь разный двигатель (от резиновой
Пример: возможные расширения функционала
Лодка: может иметь разный двигатель (от резиновой
Пример: перечень классов, интерфейсов, объектов
Класс "перевозимый объект" IPassenger
Конкретные
Пример: перечень классов, интерфейсов, объектов
Класс "перевозимый объект" IPassenger
Конкретные

Пример: перечень классов, интерфейсов, объектов
Класс "мотор транспортного средства" -
Пример: перечень классов, интерфейсов, объектов
Класс "мотор транспортного средства" -

Пример: отношения между классами
ITransport --- композиция ----> IEngine
IDriver
Пример: отношения между классами
ITransport --- композиция ----> IEngine
IDriver

Пример: простая реализация лабораторной работы №4 (делегирование и proxy)
Для выполнения
Пример: простая реализация лабораторной работы №4 (делегирование и proxy)
Для выполнения
Пример: простая реализация - делегирование
1) IDriver делегирует ITransport
- действие
Пример: простая реализация - делегирование
1) IDriver делегирует ITransport
- действие
Пример: простая реализация proxy
Введем в систему защитного заместителя Proxy для контроля
Пример: простая реализация proxy
Введем в систему защитного заместителя Proxy для контроля

Примеры задач
Система управления и мониторинга грузоперевозками
Система бронирования билетов на театрально-зрелищные представления
Система
Примеры задач
Система управления и мониторинга грузоперевозками
Система бронирования билетов на театрально-зрелищные представления
Система
Замечания к реализации
(решение проблемы с параметрами разных типов)
Замечания к реализации
(решение проблемы с параметрами разных типов)

Замечания к реализации
Иногда возникает необходимость реализовать класс-делегат, который содержит несколько функций
Замечания к реализации
Иногда возникает необходимость реализовать класс-делегат, который содержит несколько функций

Физические данные
// эти данные будут в качестве параметров команд
// собрали
Физические данные
// эти данные будут в качестве параметров команд
// собрали

Абстрактный класс параметров
class param{
public:
void * data;
virtual void *getParam() =
Абстрактный класс параметров
class param{
public:
void * data;
virtual void *getParam() =
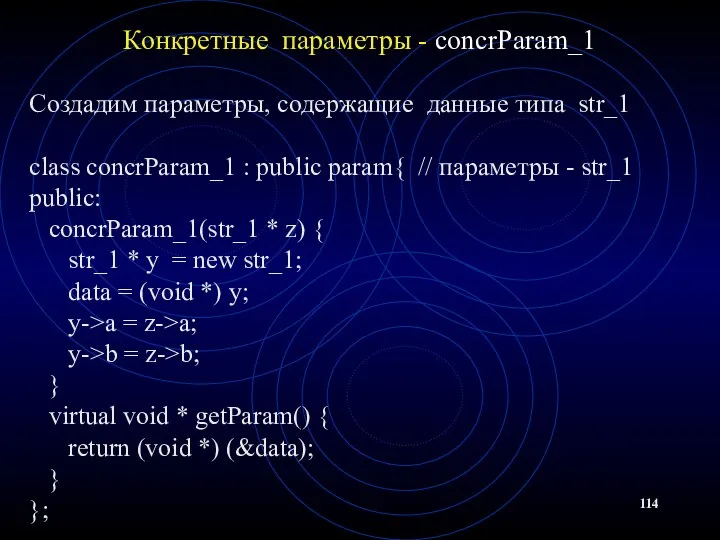
Конкретные параметры - concrParam_1
Создадим параметры, содержащие данные типа str_1
class concrParam_1
Конкретные параметры - concrParam_1
Создадим параметры, содержащие данные типа str_1
class concrParam_1
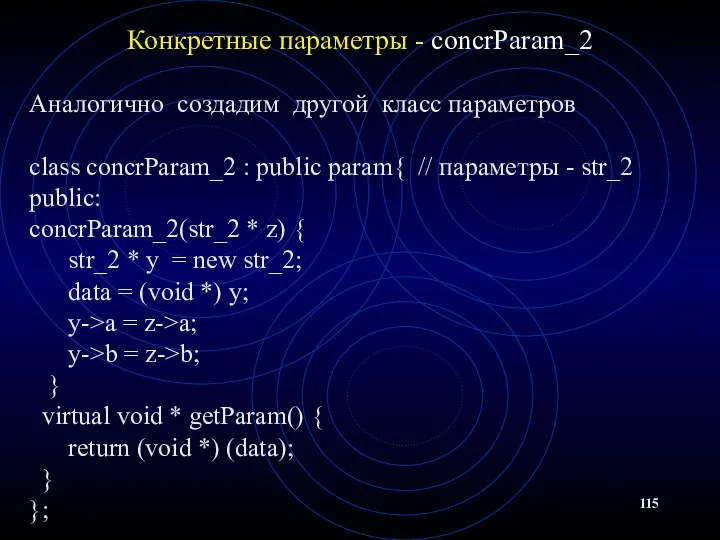
Конкретные параметры - concrParam_2
Аналогично создадим другой класс параметров
class concrParam_2 :
Конкретные параметры - concrParam_2
Аналогично создадим другой класс параметров
class concrParam_2 :
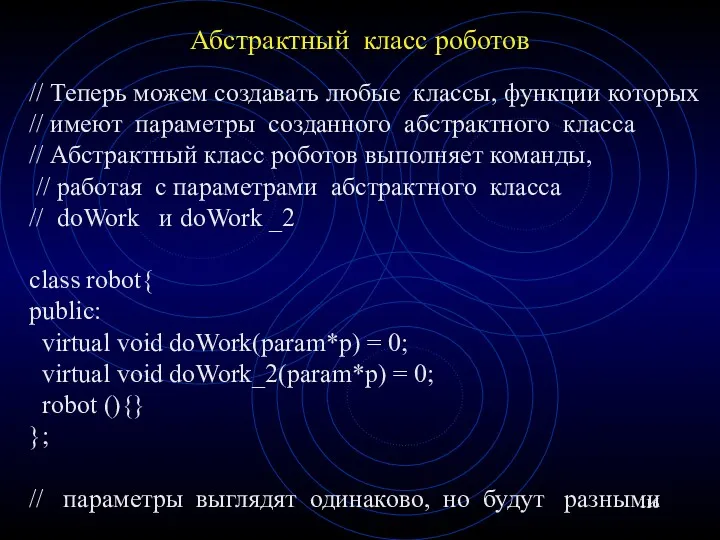
Абстрактный класс роботов
// Теперь можем создавать любые классы, функции которых
//
Абстрактный класс роботов
// Теперь можем создавать любые классы, функции которых
//

Конкретный робот
class robot_1 : public robot { // У него параметры
Конкретный робот
class robot_1 : public robot { // У него параметры
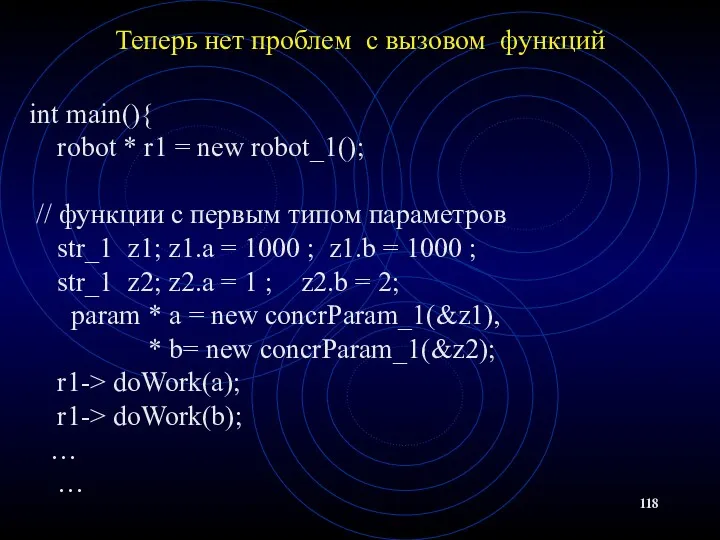
Теперь нет проблем с вызовом функций
int main(){
robot * r1 =
Теперь нет проблем с вызовом функций
int main(){
robot * r1 =
Теперь нет проблем с вызовом функций
…
// функции с другим
Теперь нет проблем с вызовом функций
…
// функции с другим
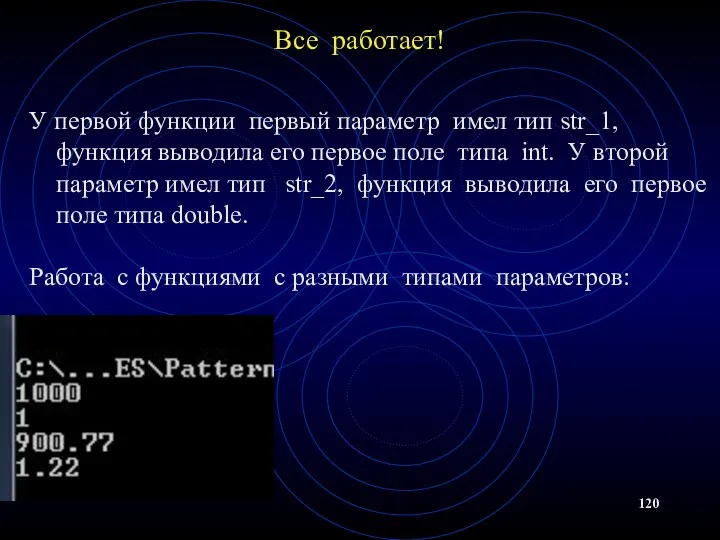
Все работает!
У первой функции первый параметр имел тип str_1, функция выводила
Все работает!
У первой функции первый параметр имел тип str_1, функция выводила
 Создание лексико-семантической основы ИПЯ
Создание лексико-семантической основы ИПЯ Базы данных
Базы данных Эталонная модель сетевого взаимодействия OSI
Эталонная модель сетевого взаимодействия OSI Белгі бойынша көпхаттамалы коммутация технологиясының жұмысын өңдеу
Белгі бойынша көпхаттамалы коммутация технологиясының жұмысын өңдеу Тестировщик программного обеспечения. Итоговый проект Сайт Beerkontora.ru
Тестировщик программного обеспечения. Итоговый проект Сайт Beerkontora.ru Обработка текстовой и графической информации
Обработка текстовой и графической информации Сетевые операционные системы
Сетевые операционные системы Комп’ютерні віруси
Комп’ютерні віруси Пошук матеріалів в Інтернеті та їх оцінювання
Пошук матеріалів в Інтернеті та їх оцінювання Инфраструктура открытых ключей
Инфраструктура открытых ключей Database Systems Development. Lecture. 1 Introduction to Database Systems
Database Systems Development. Lecture. 1 Introduction to Database Systems Hashtag my day. User story
Hashtag my day. User story Надійність, діагностика та експлуатація комп’ютерних систем та мереж
Надійність, діагностика та експлуатація комп’ютерних систем та мереж Разработка утилиты для обфускации веб-приложений
Разработка утилиты для обфускации веб-приложений Технология Drag and Drop
Технология Drag and Drop Онлайн – ресурсы для поиска работы и найма персонала
Онлайн – ресурсы для поиска работы и найма персонала Строки. Регулярные выражения
Строки. Регулярные выражения Интернет. Глобальная компьютерная сеть
Интернет. Глобальная компьютерная сеть Базы данных. Основные понятия
Базы данных. Основные понятия Операционные системы. Файловые системы. Загрузчики. Виртуальные среды
Операционные системы. Файловые системы. Загрузчики. Виртуальные среды Расширить поле до 1170px
Расширить поле до 1170px Моделирование памяти. Информационные объекты MATRIX. Организация циклов
Моделирование памяти. Информационные объекты MATRIX. Организация циклов Інформаційні характеристики каналів зв'язку
Інформаційні характеристики каналів зв'язку Поняття про базу даних як основну складову будь-якої ІС
Поняття про базу даних як основну складову будь-якої ІС Понятие ресурса ОС
Понятие ресурса ОС Обработка форм
Обработка форм ПОРТФОЛИО ДОСТИЖЕНИЙ
ПОРТФОЛИО ДОСТИЖЕНИЙ Потоки и процессы
Потоки и процессы