- Computer vision for robotics

Содержание
- 2. Why do we need computer vision? Smart video surveillance Biometrics Automatic Driver Assistance Systems Machine vision
- 3. Vision is hard! Even for humans…
- 4. Texai parking
- 5. Agenda Camera model Stereo vision Stereo vision on GPU Object detection methods Sliding window Local descriptors
- 6. Pinhole camera model
- 7. Distortion model
- 8. Reprojection error
- 9. Homography
- 10. Perspective-n-Points problem P4P RANSAC (RANdom SAmple Consensus)
- 11. Stereo: epipolar geometry Fundamental matrix constraint
- 12. Stereo Rectification Algorithm steps are shown at right: Goal: Each row of the image contains the
- 13. Stereo correspondence Block matching Dynamic programming Inter-scanline dependencies Segmentation Belief propagation
- 14. Stereo correspondence block matching For each block in left image: Search for the corresponding block in
- 15. Pre- and post processing Low texture filtering SSD/SAD minimum ambiguity removal Using gradients instead of intensities
- 16. Stereo Matching
- 17. Parallel implementation of block matching The outer cycle iterates through disparity values We compute SSD and
- 18. Parallelization scheme
- 19. Optimization concepts Not using texture – saving registers 1 thread per 8 pixels processing – using
- 20. Performance summary CPU (i5 750 2.66GHz), GPU (Fermi card 448 cores) Block matching on CPU+2xGPU is
- 21. Full-HD stereo in realtime http://www.youtube.com/watch?v=ThE7sRAtaWU
- 22. Applications of stereo vision Machine vision Automatic Driver Assistance Movie production Robotics Object recognition Visual odometry
- 23. Object detection
- 24. Sliding window approach
- 25. Cascade classifier Stage 1 Stage 2 Stage 3 image face face Not face Not face Not
- 26. Face detection
- 27. Object detection with local descriptors Detect keypoints Calculate local descriptors for each point Match descriptors for
- 28. FAST feature detector
- 29. Keypoints example
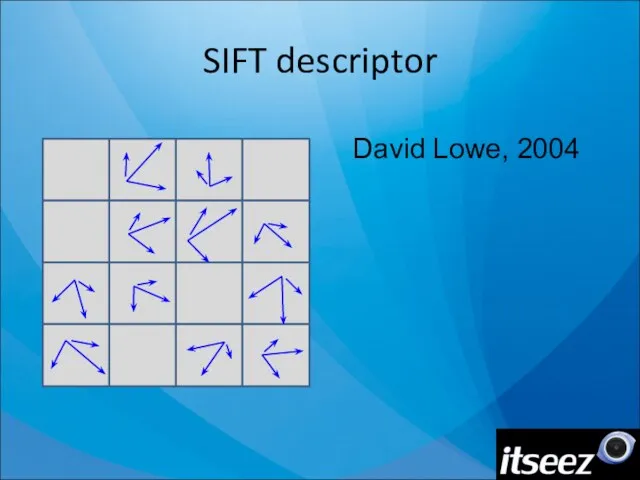
- 30. SIFT descriptor David Lowe, 2004
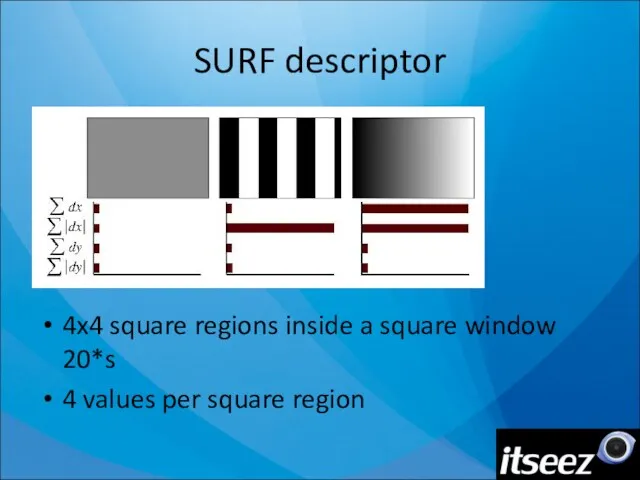
- 31. SURF descriptor 4x4 square regions inside a square window 20*s 4 values per square region
- 32. More descriptors One way descriptor C-descriptor, FERNS, BRIEF HoG Daisy
- 33. Matching descriptors example
- 34. Ways to improve matching Increase the inliers to outliers ratio Distance threshold Distance ratio threshold (second
- 35. Random Sample Consensus Do n iterations until #inliers > inlierThreshold Draw k matches randomly Find the
- 36. Geometry validation
- 37. Scaling up FLANN (Fast Library for Approximate Nearest Neighbors) In OpenCV thanks to Marius Muja Bag
- 38. Projects Textured object detection PR2 robot automatic plugin Visual odometry / SLAM
- 39. Textured object detection
- 40. Object detection example Iryna Gordon and David G. Lowe, "What and where: 3D object recognition with
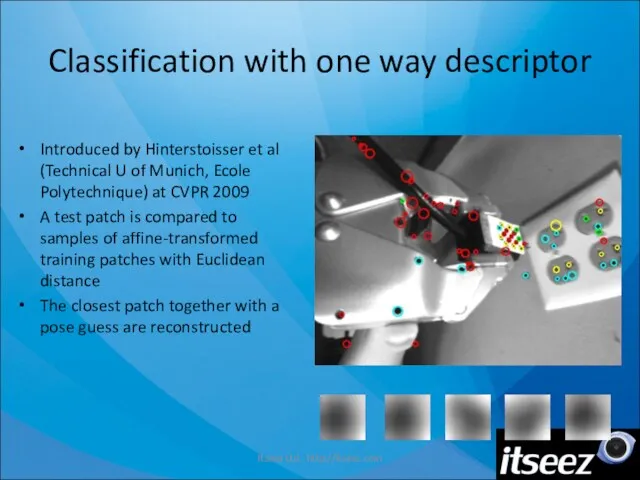
- 41. Keypoint detection We are looking for small dark regions This operation takes only ~10ms on 640x480
- 42. Classification with one way descriptor Introduced by Hinterstoisser et al (Technical U of Munich, Ecole Polytechnique)
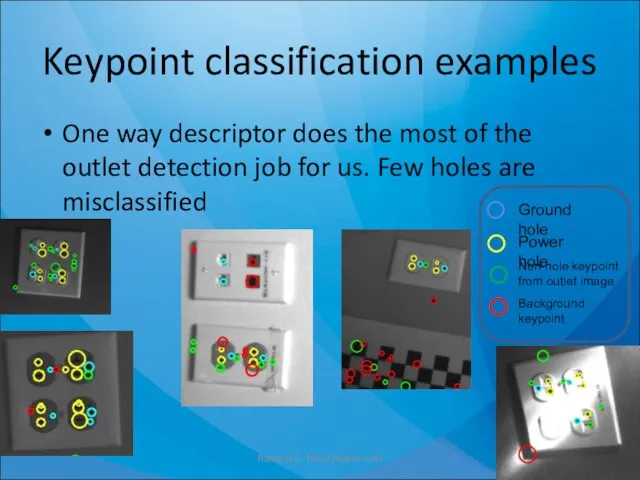
- 43. Keypoint classification examples One way descriptor does the most of the outlet detection job for us.
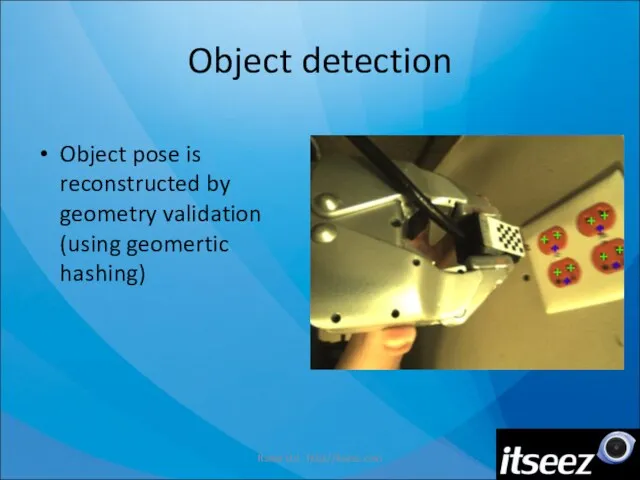
- 44. Object detection Object pose is reconstructed by geometry validation (using geomertic hashing) Itseez Ltd. http://itseez.com
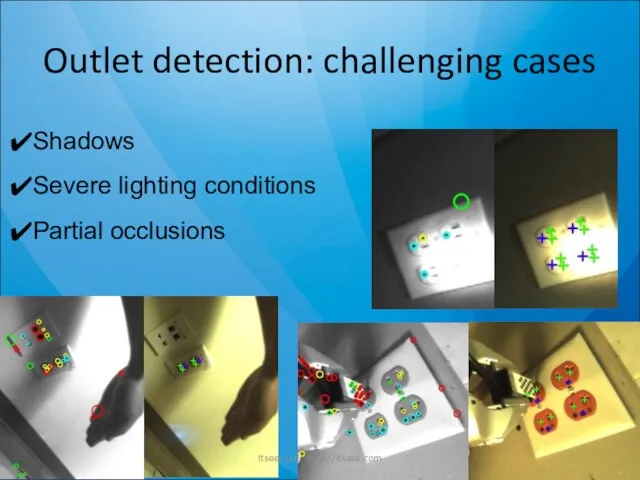
- 45. Outlet detection: challenging cases Shadows Severe lighting conditions Partial occlusions Itseez Ltd. http://itseez.com
- 46. PR2 plugin (outlet and plug detection) http://www.youtube.com/watch?v=GWcepdggXsU
- 47. Visual odometry
- 48. Visual odometry (II)
- 50. Скачать презентацию
Why do we need computer vision?
Smart video surveillance
Biometrics
Automatic Driver Assistance Systems
Machine
Why do we need computer vision?
Smart video surveillance
Biometrics
Automatic Driver Assistance Systems
Machine
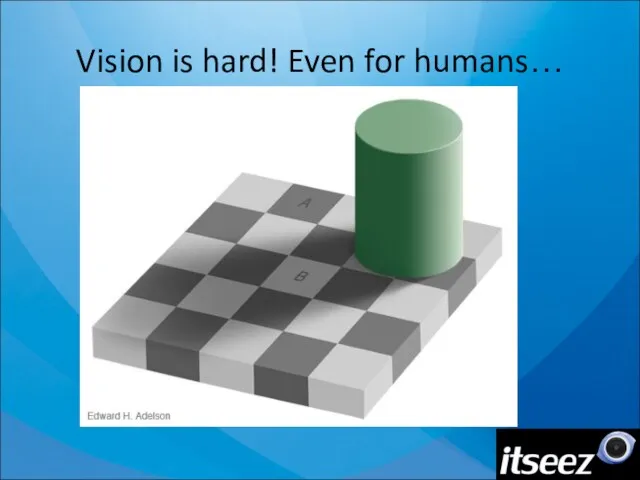
Vision is hard! Even for humans…
Vision is hard! Even for humans…
Texai parking
Texai parking
Agenda
Camera model
Stereo vision
Stereo vision on GPU
Object detection methods
Sliding window
Local descriptors
Applications
Textured
Agenda
Camera model
Stereo vision
Stereo vision on GPU
Object detection methods
Sliding window
Local descriptors
Applications
Textured
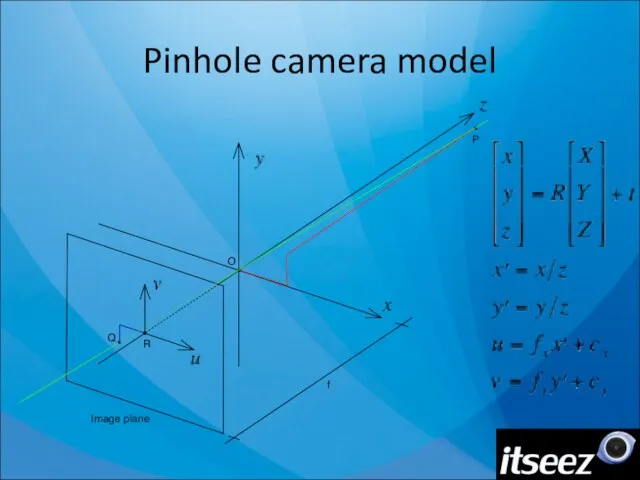
Pinhole camera model
Pinhole camera model
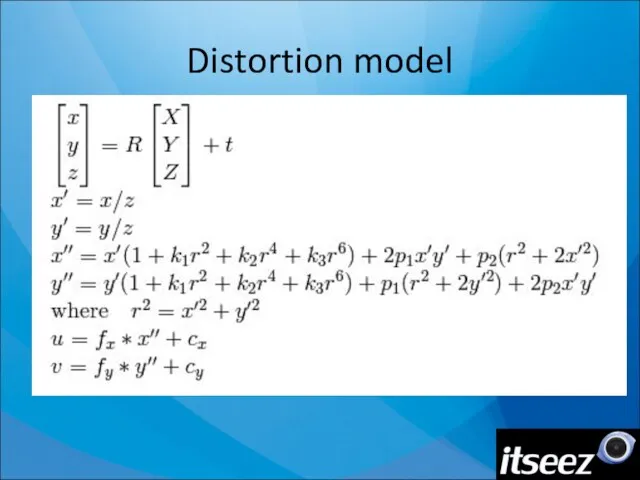
Distortion model
Distortion model
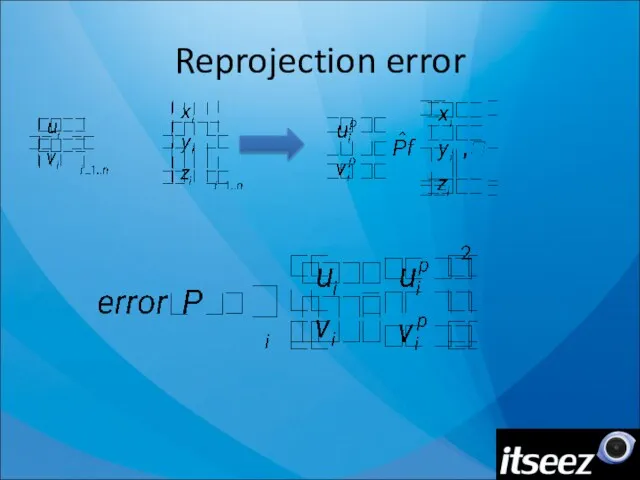
Reprojection error
Reprojection error
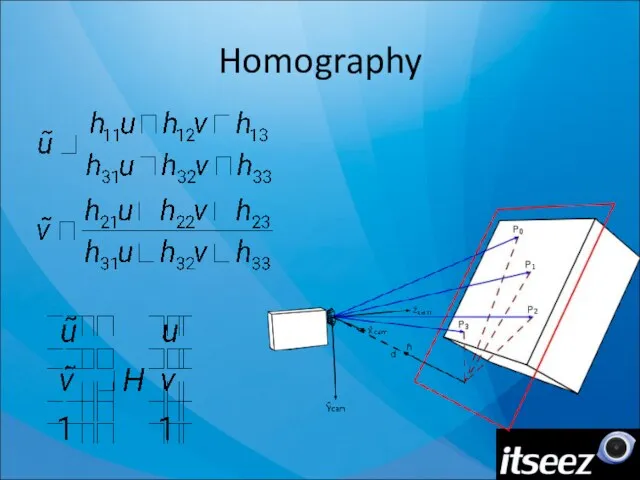
Homography
Homography
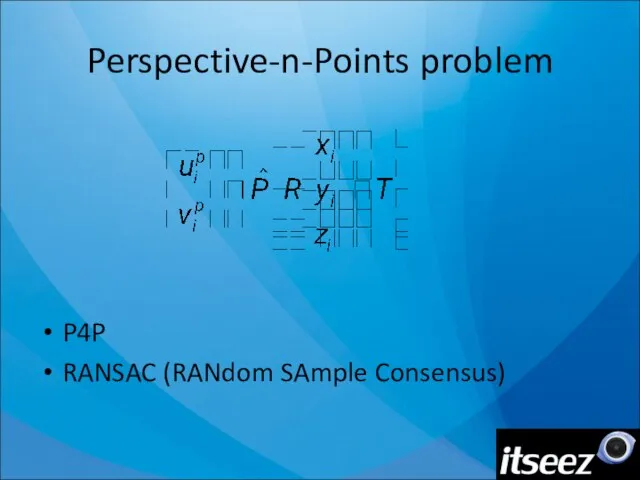
Perspective-n-Points problem
P4P
RANSAC (RANdom SAmple Consensus)
Perspective-n-Points problem
P4P
RANSAC (RANdom SAmple Consensus)
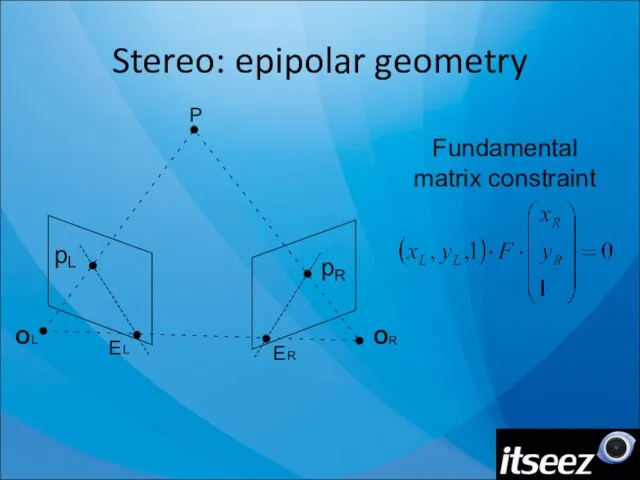
Stereo: epipolar geometry
Fundamental matrix constraint
Stereo: epipolar geometry
Fundamental matrix constraint
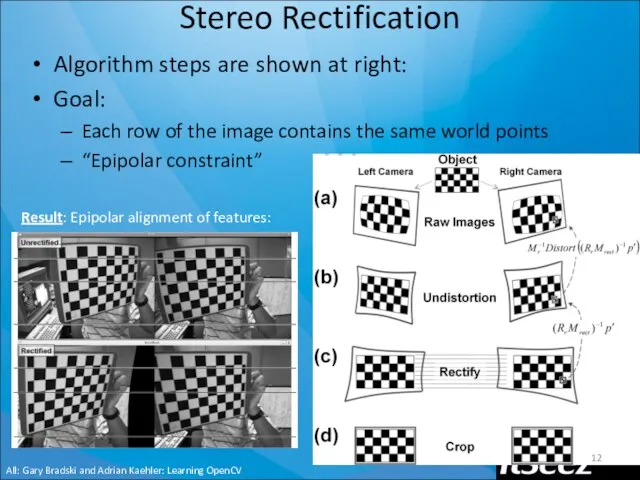
Stereo Rectification
Algorithm steps are shown at right:
Goal:
Each row of the image
Stereo Rectification
Algorithm steps are shown at right:
Goal:
Each row of the image
Stereo correspondence
Block matching
Dynamic programming
Inter-scanline dependencies
Segmentation
Belief propagation
Stereo correspondence
Block matching
Dynamic programming
Inter-scanline dependencies
Segmentation
Belief propagation
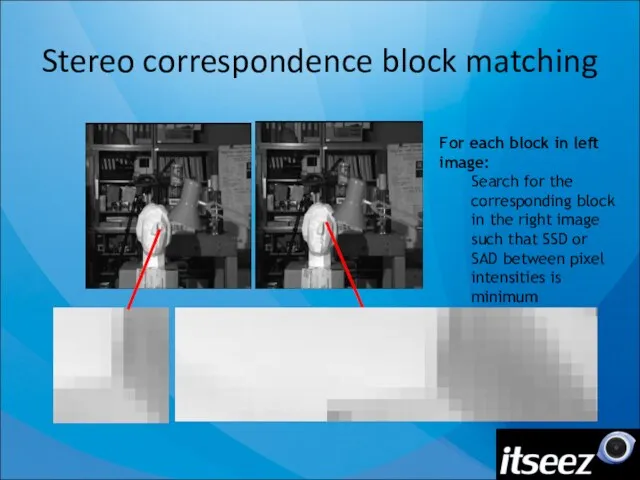
Stereo correspondence block matching
For each block in left image:
Search for the
Stereo correspondence block matching
For each block in left image:
Search for the
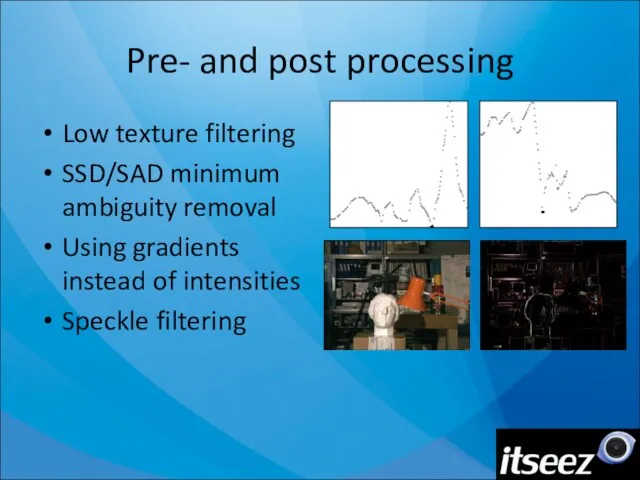
Pre- and post processing
Low texture filtering
SSD/SAD minimum ambiguity removal
Using gradients instead
Pre- and post processing
Low texture filtering
SSD/SAD minimum ambiguity removal
Using gradients instead
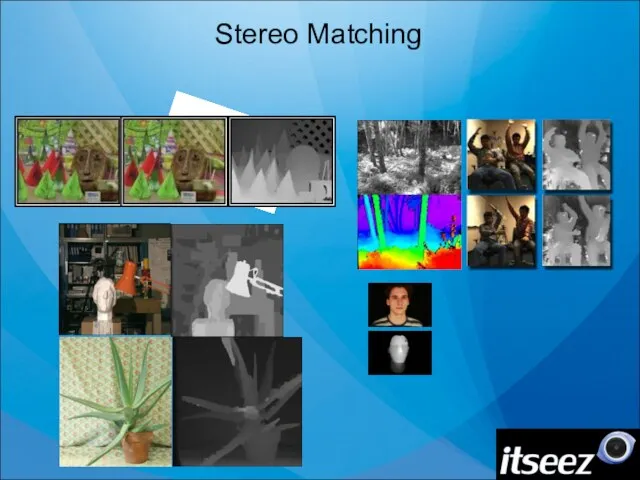
Stereo Matching
Stereo Matching
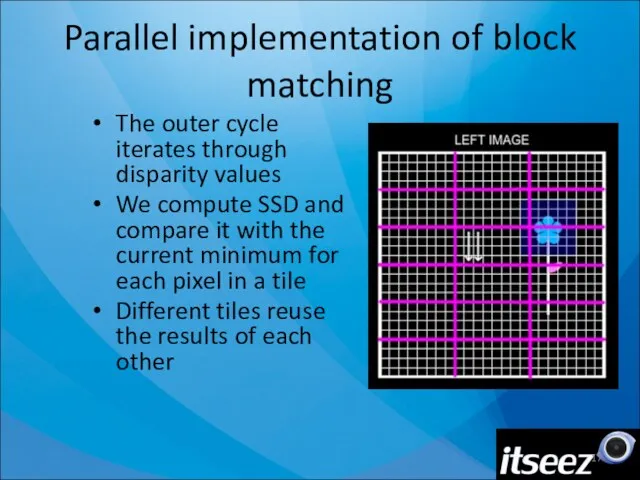
Parallel implementation of block matching
The outer cycle iterates through disparity values
We
Parallel implementation of block matching
The outer cycle iterates through disparity values
We
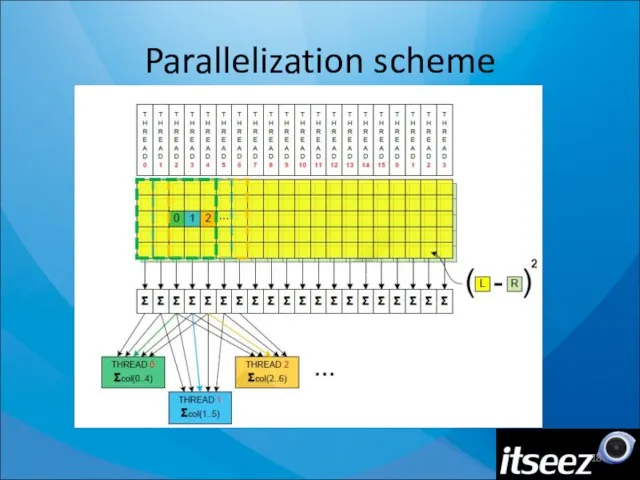
Parallelization scheme
Parallelization scheme
Optimization concepts
Not using texture – saving registers
1 thread per 8 pixels
Optimization concepts
Not using texture – saving registers
1 thread per 8 pixels
Performance summary
CPU (i5 750 2.66GHz), GPU (Fermi card 448 cores)
Block matching
Performance summary
CPU (i5 750 2.66GHz), GPU (Fermi card 448 cores)
Block matching
Full-HD stereo in realtime
http://www.youtube.com/watch?v=ThE7sRAtaWU
Full-HD stereo in realtime
http://www.youtube.com/watch?v=ThE7sRAtaWU
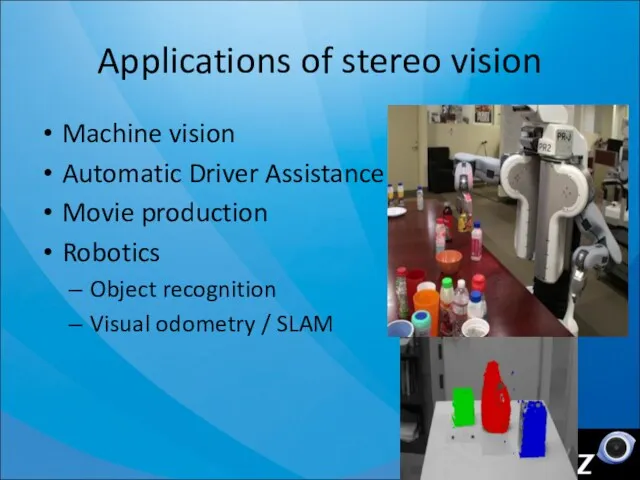
Applications of stereo vision
Machine vision
Automatic Driver Assistance
Movie production
Robotics
Object recognition
Visual odometry /
Applications of stereo vision
Machine vision
Automatic Driver Assistance
Movie production
Robotics
Object recognition
Visual odometry /
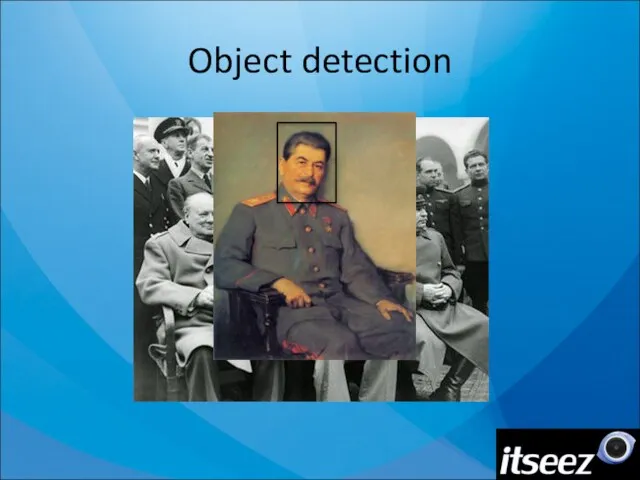
Object detection
Object detection
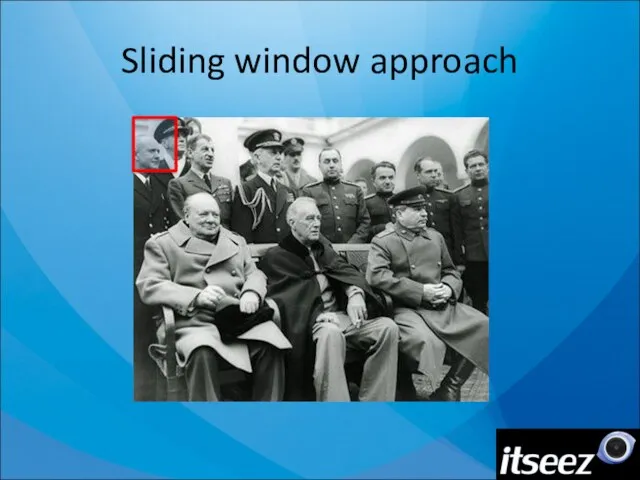
Sliding window approach
Sliding window approach
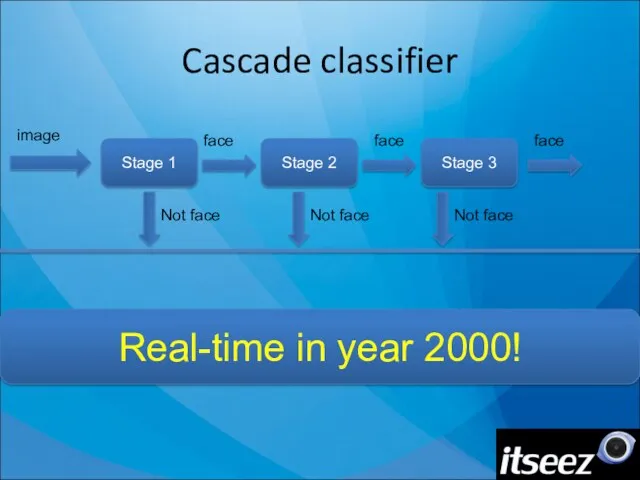
Cascade classifier
Stage 1
Stage 2
Stage 3
image
face
face
Not face
Not face
Not face
face
Real-time in year 2000!
Cascade classifier
Stage 1
Stage 2
Stage 3
image
face
face
Not face
Not face
Not face
face
Real-time in year 2000!
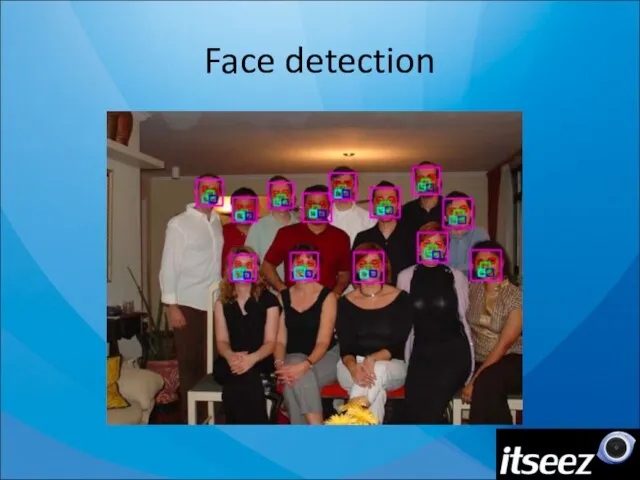
Face detection
Face detection
Object detection with local descriptors
Detect keypoints
Calculate local descriptors for each point
Match
Object detection with local descriptors
Detect keypoints
Calculate local descriptors for each point
Match
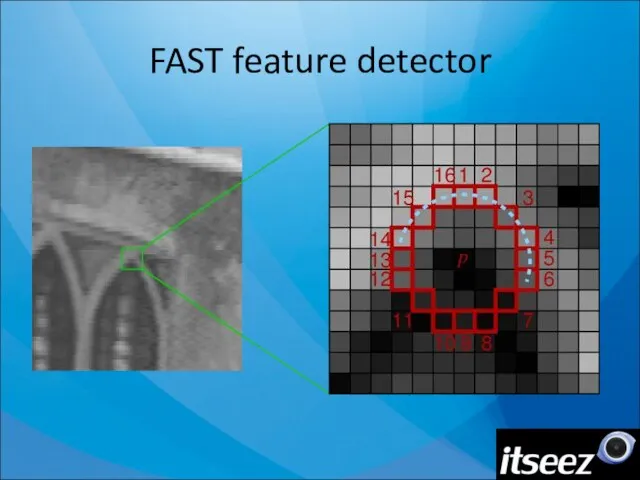
FAST feature detector
FAST feature detector
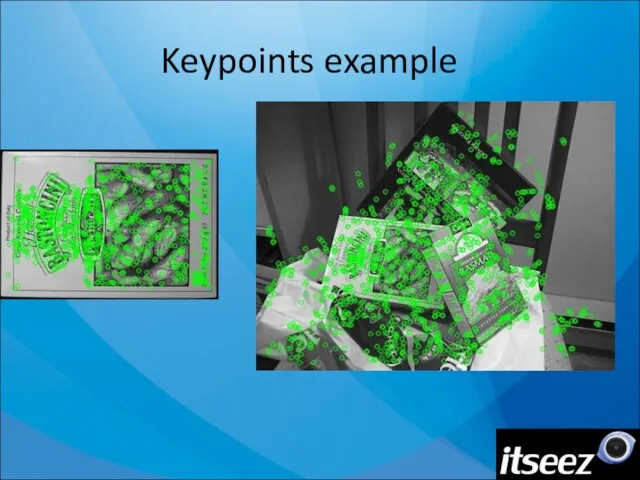
Keypoints example
Keypoints example
SIFT descriptor
David Lowe, 2004
SIFT descriptor
David Lowe, 2004
SURF descriptor
4x4 square regions inside a square window 20*s
4 values per
SURF descriptor
4x4 square regions inside a square window 20*s
4 values per
More descriptors
One way descriptor
C-descriptor, FERNS, BRIEF
HoG
Daisy
More descriptors
One way descriptor
C-descriptor, FERNS, BRIEF
HoG
Daisy
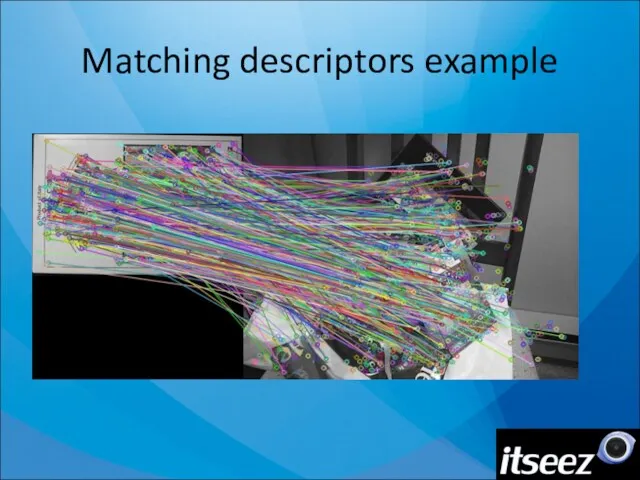
Matching descriptors example
Matching descriptors example
Ways to improve matching
Increase the inliers to outliers ratio
Distance threshold
Distance ratio
Ways to improve matching
Increase the inliers to outliers ratio
Distance threshold
Distance ratio
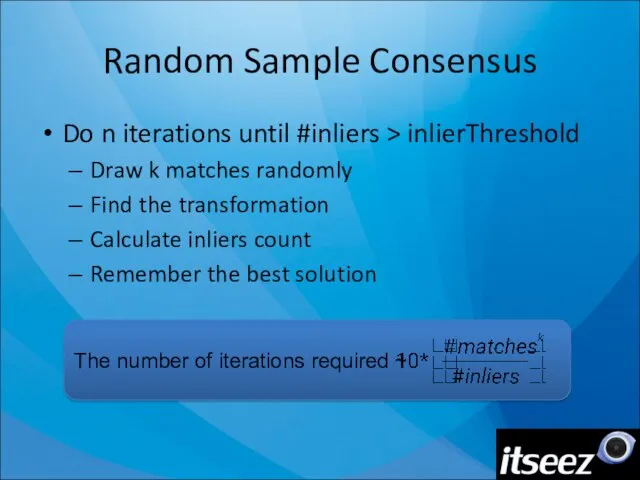
Random Sample Consensus
Do n iterations until #inliers > inlierThreshold
Draw k matches
Random Sample Consensus
Do n iterations until #inliers > inlierThreshold
Draw k matches
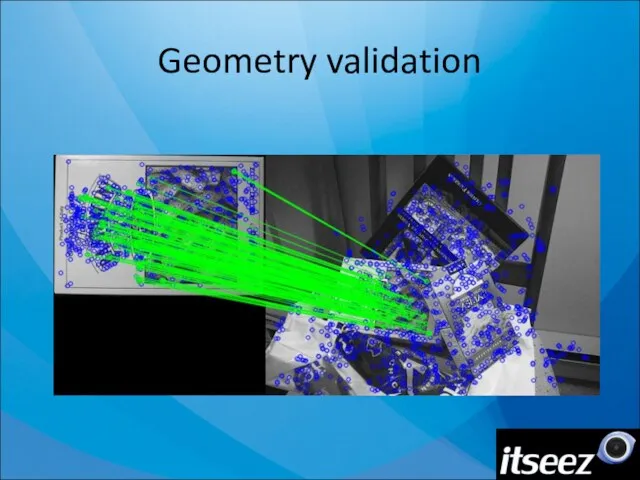
Geometry validation
Geometry validation
Scaling up
FLANN (Fast Library for Approximate Nearest Neighbors)
In OpenCV thanks to
Scaling up
FLANN (Fast Library for Approximate Nearest Neighbors)
In OpenCV thanks to
Projects
Textured object detection
PR2 robot automatic plugin
Visual odometry / SLAM
Projects
Textured object detection
PR2 robot automatic plugin
Visual odometry / SLAM
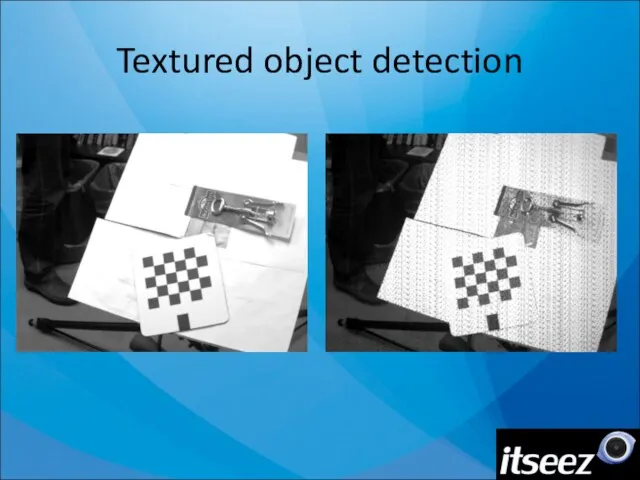
Textured object detection
Textured object detection
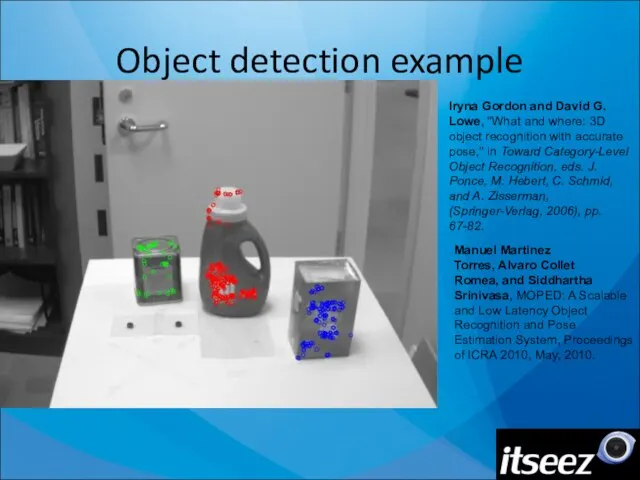
Object detection example
Iryna Gordon and David G. Lowe, "What and where:
Object detection example
Iryna Gordon and David G. Lowe, "What and where:
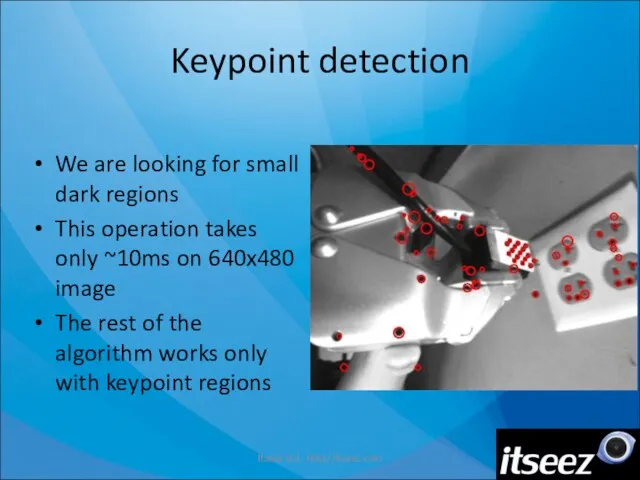
Keypoint detection
We are looking for small dark regions
This operation takes only
Keypoint detection
We are looking for small dark regions
This operation takes only
Classification with one way descriptor
Introduced by Hinterstoisser et al (Technical U
Classification with one way descriptor
Introduced by Hinterstoisser et al (Technical U
Keypoint classification examples
One way descriptor does the most of the outlet
Keypoint classification examples
One way descriptor does the most of the outlet
Object detection
Object pose is reconstructed by geometry validation (using geomertic hashing)
Itseez
Object detection
Object pose is reconstructed by geometry validation (using geomertic hashing)
Itseez
Outlet detection: challenging cases
Shadows
Severe lighting conditions
Partial occlusions
Itseez Ltd. http://itseez.com
Outlet detection: challenging cases
Shadows
Severe lighting conditions
Partial occlusions
Itseez Ltd. http://itseez.com
PR2 plugin (outlet and plug detection)
http://www.youtube.com/watch?v=GWcepdggXsU
PR2 plugin (outlet and plug detection)
http://www.youtube.com/watch?v=GWcepdggXsU
Visual odometry
Visual odometry
Visual odometry (II)
Visual odometry (II)
 Оператор цикла с предусловием
Оператор цикла с предусловием Другие нейросети. Урок 4.3
Другие нейросети. Урок 4.3 Методы сортировок массивов
Методы сортировок массивов Динамикалық SQL
Динамикалық SQL Программирование на Паскале - первый уровень. Простые (линейные) программы
Программирование на Паскале - первый уровень. Простые (линейные) программы Основы алгебры логики. Логические основы компьютера
Основы алгебры логики. Логические основы компьютера Числовые данные 2 класс
Числовые данные 2 класс Структура и функции MS DOS
Структура и функции MS DOS Организация труда в конвергентной редакции мультимедийного СМИ
Организация труда в конвергентной редакции мультимедийного СМИ Массивы
Массивы Quicksort
Quicksort Основные понятия и принципы математического моделирования
Основные понятия и принципы математического моделирования География сферы услуг (инфографика)
География сферы услуг (инфографика) Разработка клиентских веб-приложений
Разработка клиентских веб-приложений Кодирование графической информации
Кодирование графической информации Этапы проектирования базы данных
Этапы проектирования базы данных Информационное общество
Информационное общество MobileTrans. Поддержка 3000 + телефонов и различных сетей
MobileTrans. Поддержка 3000 + телефонов и различных сетей Общие сведения о языке программирования Паскаль
Общие сведения о языке программирования Паскаль Умовні і циклічні конструкції JavaScript
Умовні і циклічні конструкції JavaScript Зачем нужна информатика
Зачем нужна информатика Параллельные и последовательные интерфейсы. ААС 05
Параллельные и последовательные интерфейсы. ААС 05 MS Excel в курсовой работе
MS Excel в курсовой работе Электронное пособие для оказания профориентационной поддержки школьникам
Электронное пособие для оказания профориентационной поддержки школьникам Основы логики.
Основы логики. Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Website redesign
Website redesign ВКР: Совершенствование системы управления персоналом сервисного предприятия
ВКР: Совершенствование системы управления персоналом сервисного предприятия