- Канонічний синтез цифрових автоматів (Лекція 11)

Содержание
- 2. Вступ Математична модель цифрового пристрою представляється у вигляді абстрактного автомата (АА). Абстра́ктний автома́т (у теорії алгоритмів)
- 3. Кінцевий автомат Автомат, у якого множини A, Z, W обмежені, називається кінцевим автоматом. Абстрактний автомат можна
- 4. Автомати Мілі та Мура На практиці найбільше широко поширені дві моделі автоматів: 1. Автомат Мілі, де
- 5. Структурний автомат Структурний автомат - пристрій, який реалізує закон поведінки абстрактного автомата. Являє собою схему, що
- 6. Робота КА Процес обробки даних відбувається згідно з алгоритмом функціонування ОА. Цей алгоритм може бути представлений,
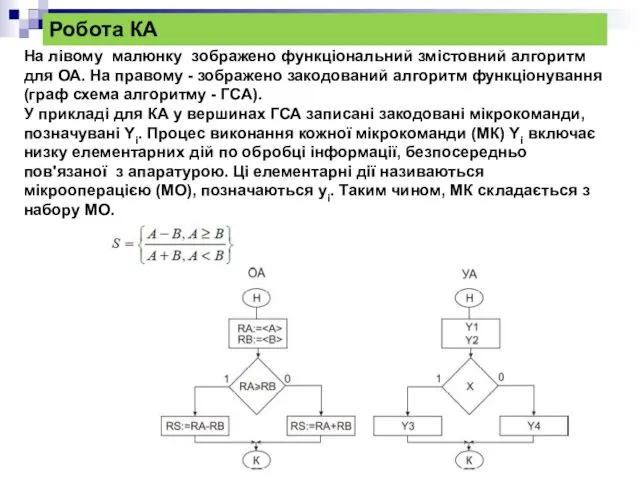
- 7. Робота КА На лівому малюнку зображено функціональний змістовний алгоритм для ОА. На правому - зображено закодований
- 8. Робота КА Наприклад. Виконання команди RS := RA + RB складається з наступних МО: y1: записати
- 9. Приклад МО Прикладом МО може бути керуючий сигнал який: Встановлює обо очищує прапорець стану МП Керуючий
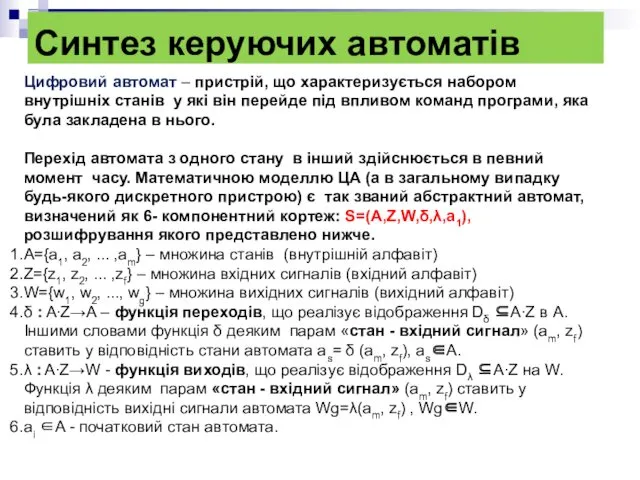
- 10. Синтез керуючих автоматів Цифровий автомат – пристрій, що характеризується набором внутрішніх станів у які він перейде
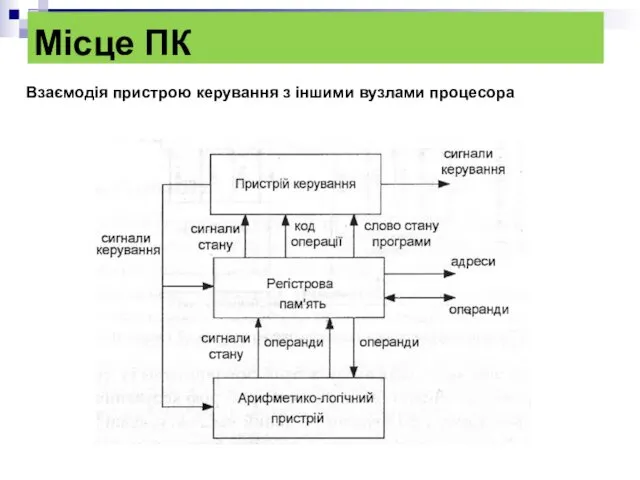
- 11. Місце ПК Взаємодія пристрою керування з іншими вузлами процесора
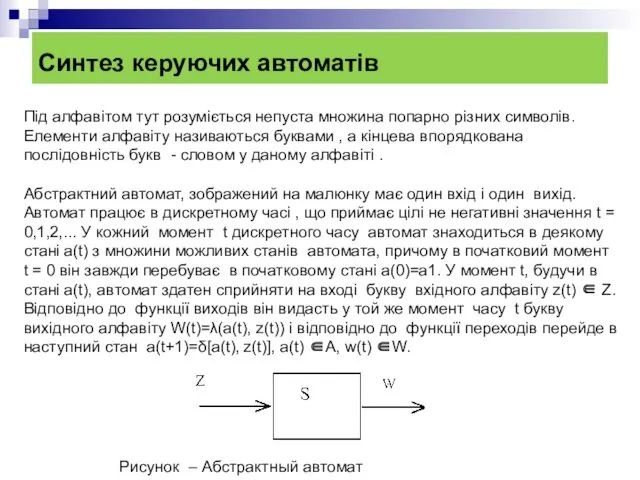
- 12. Синтез керуючих автоматів Рисунок – Абстрактный автомат Під алфавітом тут розуміється непуста множина попарно різних символів.
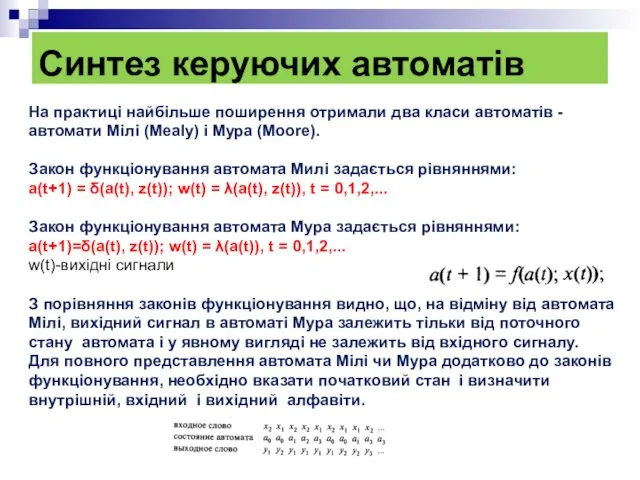
- 13. Синтез керуючих автоматів На практиці найбільше поширення отримали два класи автоматів - автомати Мілі (Mealy) і
- 14. Структура автоматів Мілі та Мура Автомат Мілі Автомат Мура
- 15. Синтез керуючих автоматів Проектування керуючих автоматів Мура та Мілі за заданою граф-схемою алгоритму Автомат Мура. Для
- 16. Автомат Мура Методика синтезу автомата Мура: 1. Відмічення станів автомата на ГСА. 2. Кодування станів. 3.
- 17. Автомат Мура 2.Таблиця кодів станів: 3. Таблиця переходів автомата Мура:
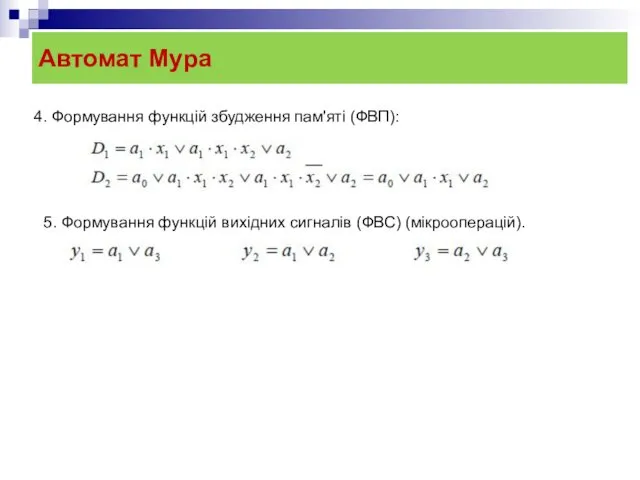
- 18. Автомат Мура 4. Формування функцій збудження пам'яті (ФВП): 5. Формування функцій вихідних сигналів (ФВС) (мікрооперацій).
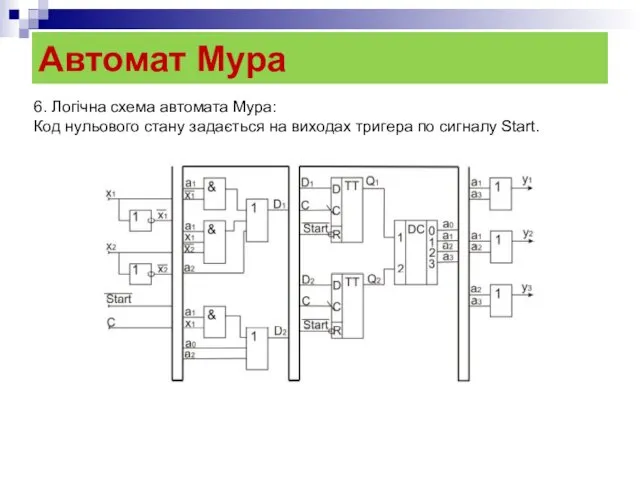
- 19. Автомат Мура 6. Логічна схема автомата Мура: Код нульового стану задається на виходах тригера по сигналу
- 20. Автомат Мілі Розрізняють три основні типи схемного пристроїв: 1. Структурна схема - найбільш загальне позначення складових
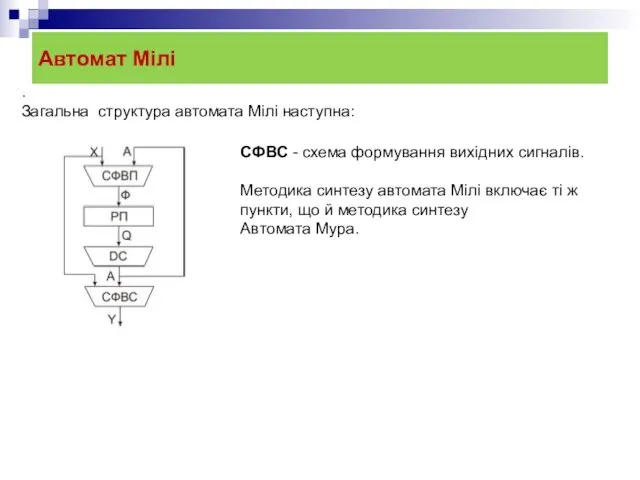
- 21. Автомат Мілі . Загальна структура автомата Мілі наступна: СФВС - схема формування вихідних сигналів. Методика синтезу
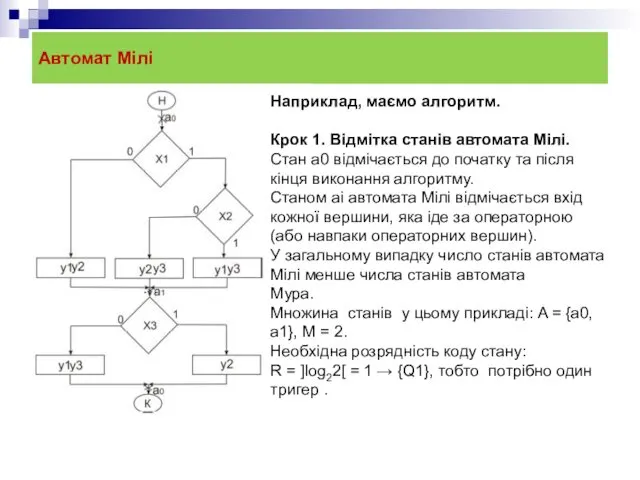
- 22. Автомат Мілі Наприклад, маємо алгоритм. Крок 1. Відмітка станів автомата Мілі. Стан a0 відмічається до початку
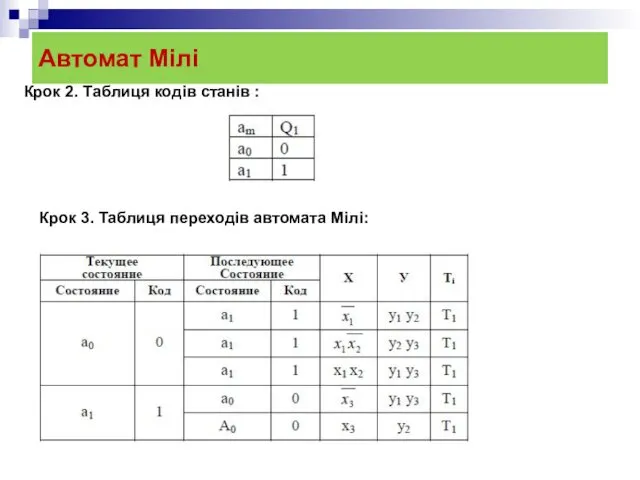
- 23. Автомат Мілі Крок 2. Таблиця кодів станів : Крок 3. Таблиця переходів автомата Мілі:
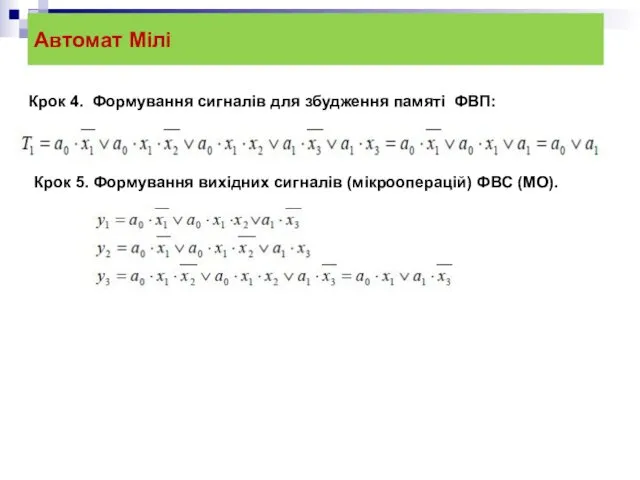
- 24. Автомат Мілі Крок 4. Формування сигналів для збудження памяті ФВП: Крок 5. Формування вихідних сигналів (мікрооперацій)
- 25. Автомат Мілі Крок 6. Логічна схема автомата Мілі:
- 26. Автомати Мілі чи автомати Мура? Для правильної роботи схем, напевне, не варто дозволяти, щоб сигнали на
- 27. Граф автомату Мура
- 28. Граф автомату Мілі Вихідні сигнали ставляться на дугах графа разом із вхідними сигналами
- 29. Загальна структура елементарного автомату
- 30. Синтез автомата Мура на ПЗУ Принцип мікропрограмного керування (Жмакін) Синтез керуючого автомата на основі програмованої логіки
- 31. Розміщення мікрокоманд послідовно в пам'яті
- 32. Організація пам'яті мікрокоманд МКПЛ-мікропрограмний лічильник. РгМК- регістр мікрокоманд
- 33. Одновібратори й генератори
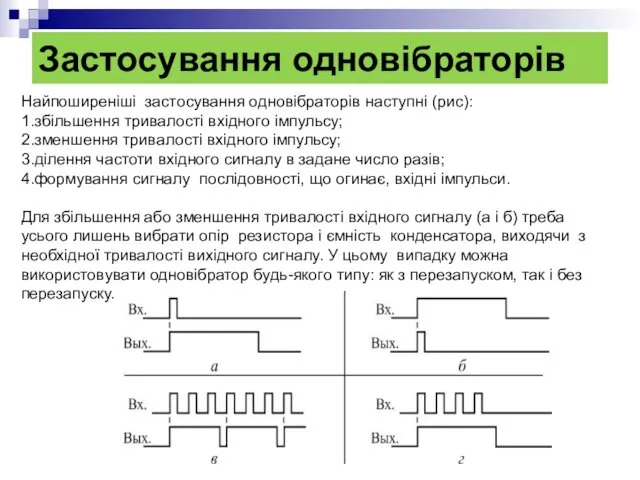
- 34. Застосування одновібраторів Найпоширеніші застосування одновібраторів наступні (рис): 1.збільшення тривалості вхідного імпульсу; 2.зменшення тривалості вхідного імпульсу; 3.ділення
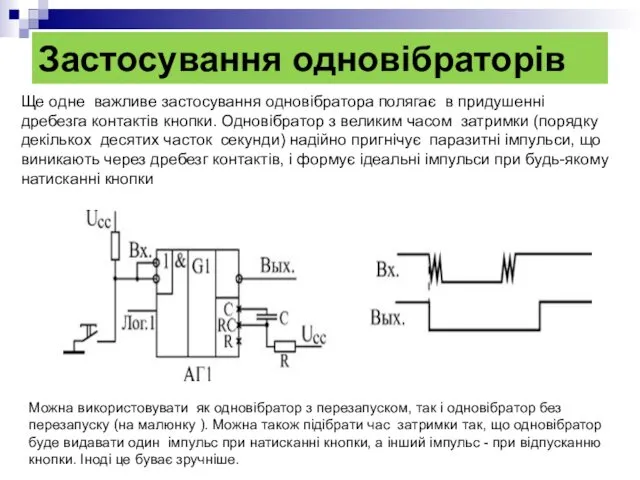
- 35. Застосування одновібраторів Ще одне важливе застосування одновібратора полягає в придушенні дребезга контактів кнопки. Одновібратор з великим
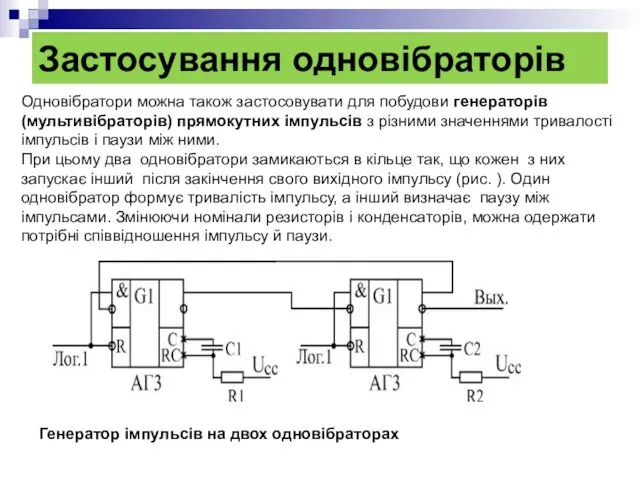
- 36. Застосування одновібраторів Одновібратори можна також застосовувати для побудови генераторів (мультивібраторів) прямокутних імпульсів з різними значеннями тривалості
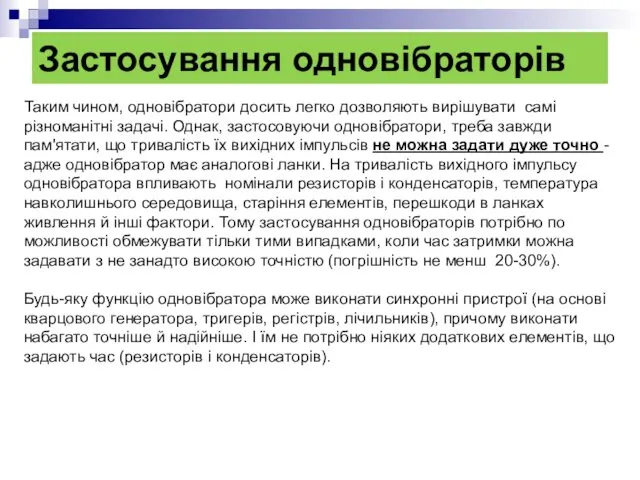
- 37. Застосування одновібраторів Таким чином, одновібратори досить легко дозволяють вирішувати самі різноманітні задачі. Однак, застосовуючи одновібратори, треба
- 39. Скачать презентацию
Вступ
Математична модель цифрового пристрою представляється у вигляді абстрактного автомата (АА).
Абстра́ктний
Вступ
Математична модель цифрового пристрою представляється у вигляді абстрактного автомата (АА).
Абстра́ктний
Кінцевий автомат
Автомат, у якого множини A, Z, W обмежені, називається кінцевим
автоматом.
Кінцевий автомат
Автомат, у якого множини A, Z, W обмежені, називається кінцевим
автоматом.
Автомати Мілі та Мура
На практиці найбільше широко поширені дві моделі
Автомати Мілі та Мура
На практиці найбільше широко поширені дві моделі
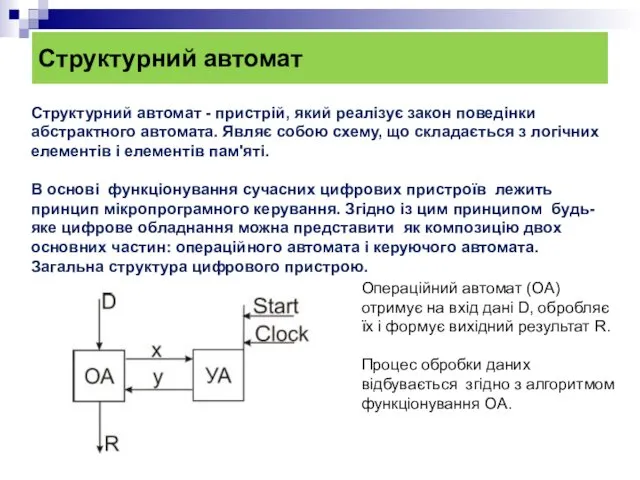
Структурний автомат
Структурний автомат - пристрій, який реалізує закон поведінки
абстрактного автомата. Являє
Структурний автомат
Структурний автомат - пристрій, який реалізує закон поведінки
абстрактного автомата. Являє
Робота КА
Процес обробки даних відбувається згідно з алгоритмом функціонування ОА.
Цей алгоритм
Робота КА
Процес обробки даних відбувається згідно з алгоритмом функціонування ОА.
Цей алгоритм
Робота КА
На лівому малюнку зображено функціональний змістовний алгоритм для ОА. На
Робота КА
На лівому малюнку зображено функціональний змістовний алгоритм для ОА. На
Робота КА
Наприклад. Виконання команди RS := RA + RB складається з
Робота КА
Наприклад. Виконання команди RS := RA + RB складається з
Приклад МО
Прикладом МО може бути керуючий сигнал який:
Встановлює обо очищує
Приклад МО
Прикладом МО може бути керуючий сигнал який:
Встановлює обо очищує
Синтез керуючих автоматів
Цифровий автомат – пристрій, що характеризується набором внутрішніх
Синтез керуючих автоматів
Цифровий автомат – пристрій, що характеризується набором внутрішніх
Місце ПК
Взаємодія пристрою керування з іншими вузлами процесора
Місце ПК
Взаємодія пристрою керування з іншими вузлами процесора
Синтез керуючих автоматів
Рисунок – Абстрактный автомат
Під алфавітом тут розуміється непуста
Синтез керуючих автоматів
Рисунок – Абстрактный автомат
Під алфавітом тут розуміється непуста
Синтез керуючих автоматів
На практиці найбільше поширення отримали два класи автоматів
Синтез керуючих автоматів
На практиці найбільше поширення отримали два класи автоматів
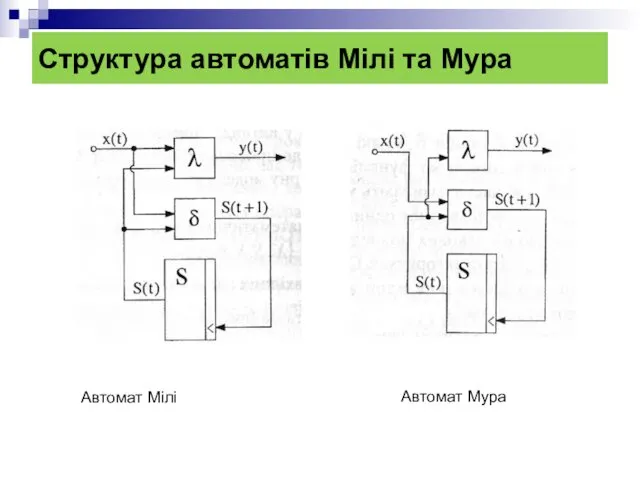
Структура автоматів Мілі та Мура
Автомат Мілі
Автомат Мура
Структура автоматів Мілі та Мура
Автомат Мілі
Автомат Мура
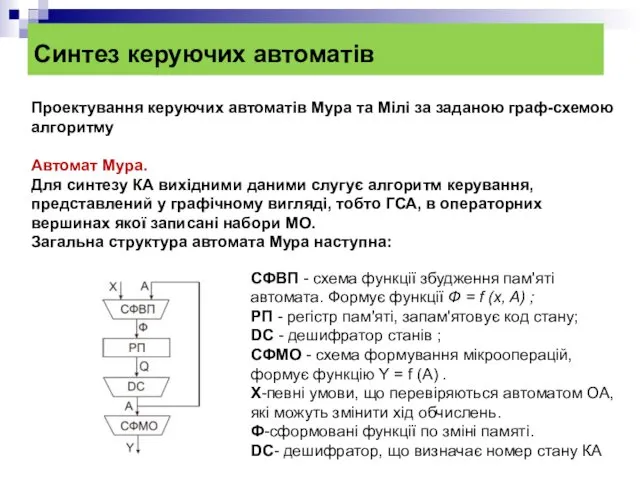
Синтез керуючих автоматів
Проектування керуючих автоматів Мура та Мілі за заданою
Синтез керуючих автоматів
Проектування керуючих автоматів Мура та Мілі за заданою
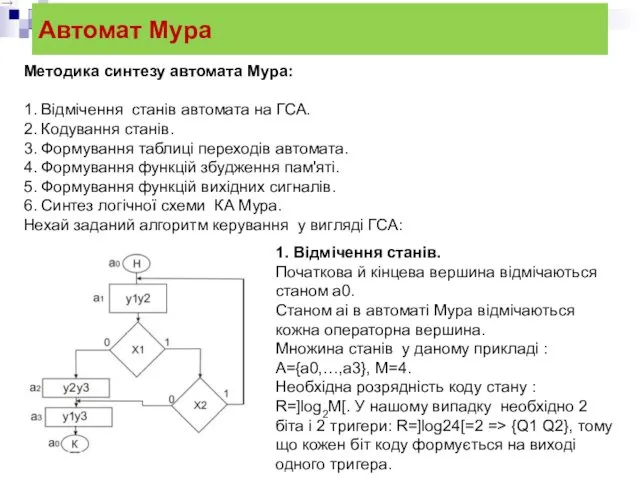
Автомат Мура
Методика синтезу автомата Мура:
1. Відмічення станів автомата на ГСА.
2. Кодування
Автомат Мура
Методика синтезу автомата Мура:
1. Відмічення станів автомата на ГСА.
2. Кодування
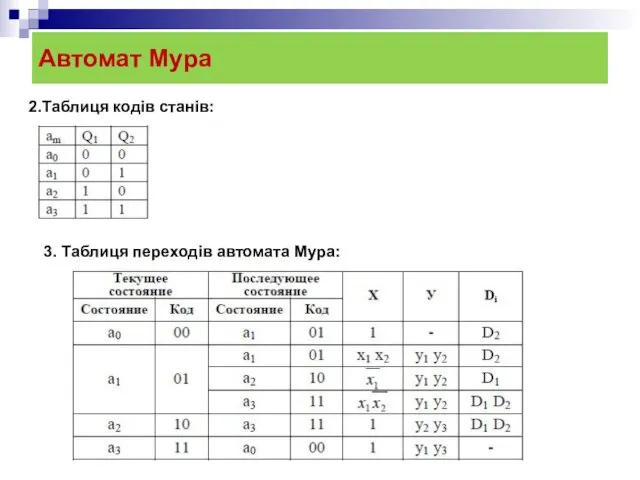
Автомат Мура
2.Таблиця кодів станів:
3. Таблиця переходів автомата Мура:
Автомат Мура
2.Таблиця кодів станів:
3. Таблиця переходів автомата Мура:
Автомат Мура
4. Формування функцій збудження пам'яті (ФВП):
5. Формування функцій вихідних сигналів
Автомат Мура
4. Формування функцій збудження пам'яті (ФВП):
5. Формування функцій вихідних сигналів
Автомат Мура
6. Логічна схема автомата Мура:
Код нульового стану задається на виходах
Автомат Мура
6. Логічна схема автомата Мура:
Код нульового стану задається на виходах
Автомат Мілі
Розрізняють три основні типи схемного пристроїв:
1. Структурна схема - найбільш
Автомат Мілі
Розрізняють три основні типи схемного пристроїв:
1. Структурна схема - найбільш
Автомат Мілі
.
Загальна структура автомата Мілі наступна:
СФВС - схема формування вихідних сигналів.
Методика
Автомат Мілі
.
Загальна структура автомата Мілі наступна:
СФВС - схема формування вихідних сигналів.
Методика
Автомат Мілі
Наприклад, маємо алгоритм.
Крок 1. Відмітка станів автомата Мілі.
Стан a0 відмічається
Автомат Мілі
Наприклад, маємо алгоритм.
Крок 1. Відмітка станів автомата Мілі.
Стан a0 відмічається
Автомат Мілі
Крок 2. Таблиця кодів станів :
Крок 3. Таблиця переходів автомата
Автомат Мілі
Крок 2. Таблиця кодів станів :
Крок 3. Таблиця переходів автомата
Автомат Мілі
Крок 4. Формування сигналів для збудження памяті ФВП:
Крок 5. Формування
Автомат Мілі
Крок 4. Формування сигналів для збудження памяті ФВП:
Крок 5. Формування

Автомат Мілі
Крок 6. Логічна схема автомата Мілі:
Автомат Мілі
Крок 6. Логічна схема автомата Мілі:
Автомати Мілі чи автомати Мура?
Для правильної роботи схем, напевне, не варто
Автомати Мілі чи автомати Мура?
Для правильної роботи схем, напевне, не варто
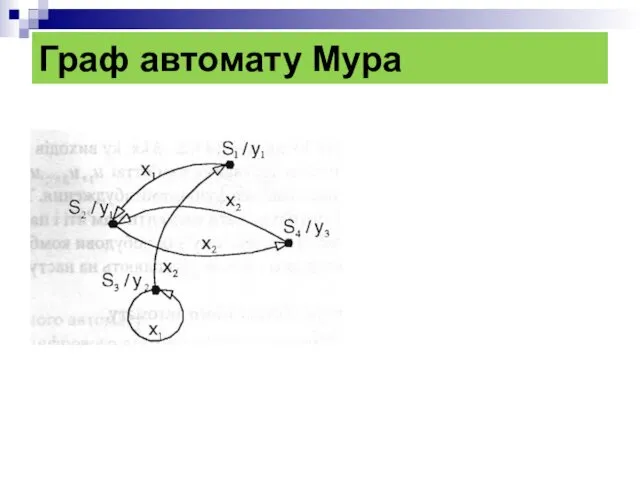
Граф автомату Мура
Граф автомату Мура
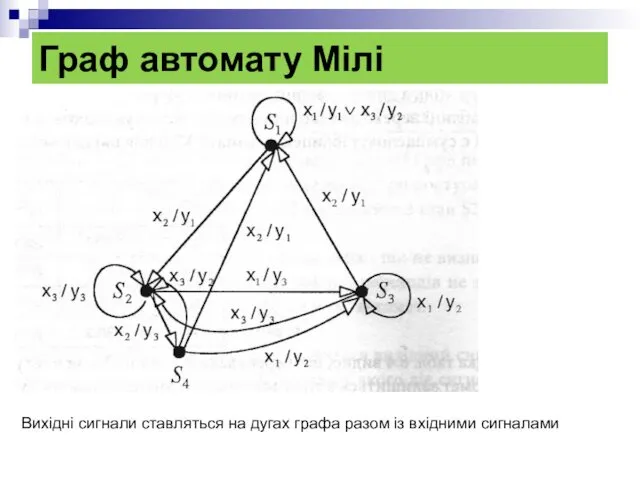
Граф автомату Мілі
Вихідні сигнали ставляться на дугах графа разом із вхідними
Граф автомату Мілі
Вихідні сигнали ставляться на дугах графа разом із вхідними

Загальна структура елементарного автомату
Загальна структура елементарного автомату
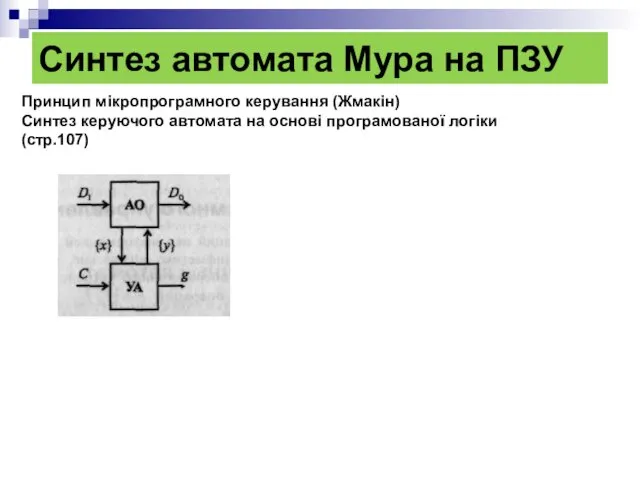
Синтез автомата Мура на ПЗУ
Принцип мікропрограмного керування (Жмакін)
Синтез керуючого автомата на
Синтез автомата Мура на ПЗУ
Принцип мікропрограмного керування (Жмакін)
Синтез керуючого автомата на
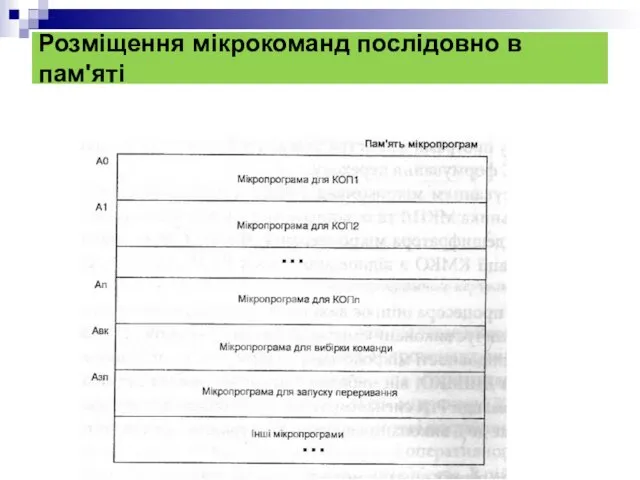
Розміщення мікрокоманд послідовно в пам'яті
Розміщення мікрокоманд послідовно в пам'яті
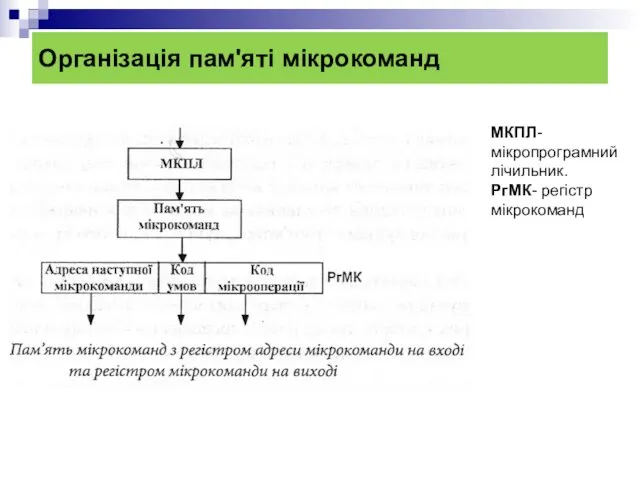
Організація пам'яті мікрокоманд
МКПЛ-мікропрограмний лічильник.
РгМК- регістр мікрокоманд
Організація пам'яті мікрокоманд
МКПЛ-мікропрограмний лічильник.
РгМК- регістр мікрокоманд
Одновібратори й генератори
Одновібратори й генератори
Застосування одновібраторів
Найпоширеніші застосування одновібраторів наступні (рис):
1.збільшення тривалості вхідного імпульсу;
2.зменшення тривалості
Застосування одновібраторів
Найпоширеніші застосування одновібраторів наступні (рис):
1.збільшення тривалості вхідного імпульсу;
2.зменшення тривалості
Застосування одновібраторів
Ще одне важливе застосування одновібратора полягає в придушенні дребезга контактів
Застосування одновібраторів
Ще одне важливе застосування одновібратора полягає в придушенні дребезга контактів
Застосування одновібраторів
Одновібратори можна також застосовувати для побудови генераторів (мультивібраторів) прямокутних імпульсів
Застосування одновібраторів
Одновібратори можна також застосовувати для побудови генераторів (мультивібраторів) прямокутних імпульсів
Застосування одновібраторів
Таким чином, одновібратори досить легко дозволяють вирішувати самі різноманітні задачі.
Застосування одновібраторів
Таким чином, одновібратори досить легко дозволяють вирішувати самі різноманітні задачі.
 Типы алгоритмов
Типы алгоритмов Классическая линейная модель множественной регрессии. МНК. Лекция 2
Классическая линейная модель множественной регрессии. МНК. Лекция 2 Що мені загрожує в Інтернеті?
Що мені загрожує в Інтернеті? Логические выражения и логические операции
Логические выражения и логические операции Кодирование текста
Кодирование текста Методика поиска и подбора литературы в библиотеке
Методика поиска и подбора литературы в библиотеке Программирование. Лекция 4
Программирование. Лекция 4 Accounting applications on introduction computer to Microsoft Excel
Accounting applications on introduction computer to Microsoft Excel Программирование ветвлений на Паскале (11 класс)
Программирование ветвлений на Паскале (11 класс) Требования, предъявляемые к ОС
Требования, предъявляемые к ОС Что такое персональные данные? Какими бывают персональные данные?
Что такое персональные данные? Какими бывают персональные данные? Информация и информационные процессы. 5 класс
Информация и информационные процессы. 5 класс Структурная методология
Структурная методология Android компоненттері
Android компоненттері Портал Поставщиков Москвы
Портал Поставщиков Москвы Области действия идентификаторов
Области действия идентификаторов Мы в современном медиапространстве: уважение, безопасность, достоверность
Мы в современном медиапространстве: уважение, безопасность, достоверность Передача информации в древние времена и сегодня
Передача информации в древние времена и сегодня Установка и программирование. Позиционирование систем NEC
Установка и программирование. Позиционирование систем NEC Символьные и строковые переменные
Символьные и строковые переменные Достоинства и недостатки методов программирования
Достоинства и недостатки методов программирования АРМ Реестр государственных и муниципальных услуг
АРМ Реестр государственных и муниципальных услуг Секреты Word
Секреты Word Пошук відомостей у мережі Інтернет (Урок 8)
Пошук відомостей у мережі Інтернет (Урок 8) Разработка и технология создания информационного стенда
Разработка и технология создания информационного стенда C++ для ЕГЭ
C++ для ЕГЭ 4. Показатели производительности параллельных систем. 5-6. Предметные предпосылки параллелизма
4. Показатели производительности параллельных систем. 5-6. Предметные предпосылки параллелизма Модель OSI
Модель OSI