- Операционные системы

Содержание
- 2. Уровни абстракции ОС
- 3. Структура уровней абстракции OS/2
- 4. Структура системы с “микроядром” (micro-kernel) Максимум модулей переносится из ядра ОС в “пользовательское пространство” Коммуникация выполняется
- 5. Клиент-серверная структура Windows NT
- 6. Виртуальные машины Концепция виртуальной машины доводит подход, основанный на уровнях абстракции, до своего логического завершения. Согласно
- 7. Виртуальные машины (продолжение) Физические ресурсы компьютерной системы разделяются для поддержки нескольких виртуальных машин Диспетчеризация процессора создает
- 8. Модели ОС без использования виртуальных машин и на основе виртуальных машин
- 9. Преимущества и недостатки виртуальных машин Концепция виртуальной машины обеспечивает полную защиту системных ресурсов , так как
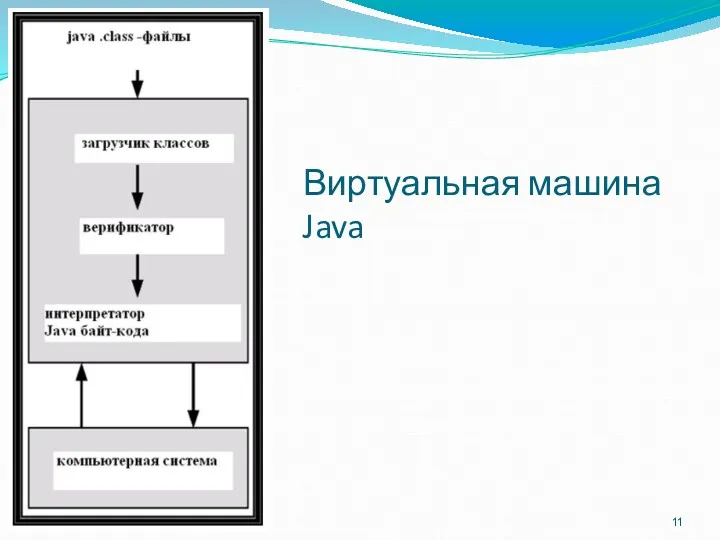
- 10. Виртуальная машина Java (JVM) Программы на Java компилируются в платформно-независимый байт-код (bytecode), исполняемый виртуальной машиной Java
- 11. Виртуальная машина Java
- 12. Цели проектирования и разработки ОС Цели с точки зрения пользователя: ОС должна быть удобной в использовании,
- 13. Механизмы (mechanisms) и политики (policies) Механизмы – определяют, каким образом реализовать функциональность; политики - определяют, что
- 14. Реализация ОС Традиционно ОС разрабатывались на ассемблере; теперь они могут разрабатываться на языках высокого уровня Код
- 15. Генерация ОС (SYSGEN) ОС проектируются с целью использования на любой машине из некоторого класса; для каждого
- 16. Операционные системы Управление процессами. Планирование и диспетчеризация процессов
- 17. Понятие процесса ОС исполняет множество классов программ: Пакетная система (batch system) – задания (jobs) Система с
- 18. Состояния процесса При исполнении процесс может изменять свое состояние следующим образом: Новый (new): Процесс создается. Исполняемый
- 19. Диаграмма состояний процесса
- 20. Блок управления процессом (Process Control Block – PCB) Информация, ассоциируемая с каждым процессом Состояние процесса Счетчик
- 21. Блок управления процессом (PCB)
- 22. Переключение процессора с одного процесса на другой
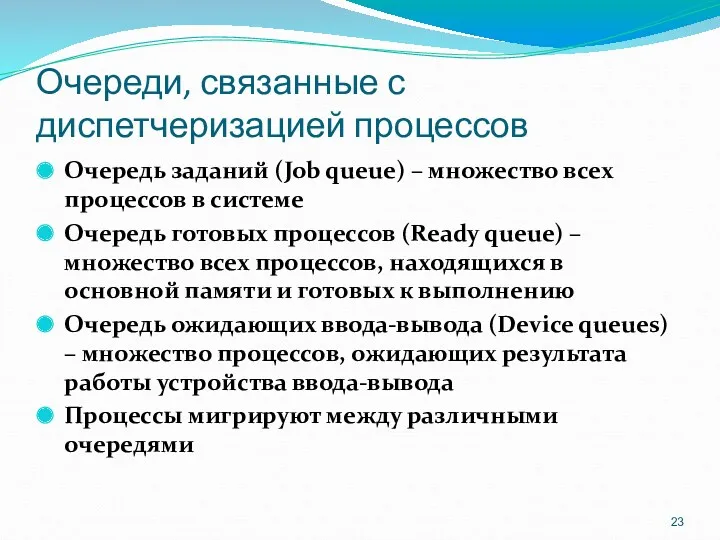
- 23. Очереди, связанные с диспетчеризацией процессов Очередь заданий (Job queue) – множество всех процессов в системе Очередь
- 24. Очередь готовых процессов и очереди для различных устройств ввода-вывода
- 25. Графическое представление диспетчеризации процессов
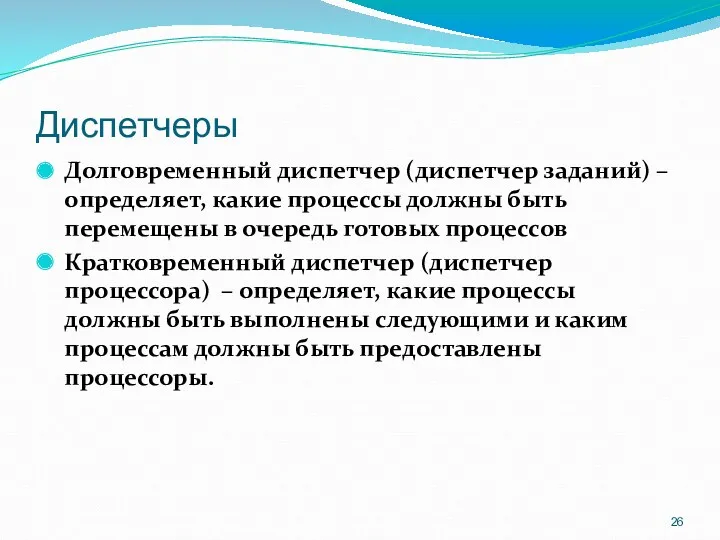
- 26. Диспетчеры Долговременный диспетчер (диспетчер заданий) – определяет, какие процессы должны быть перемещены в очередь готовых процессов
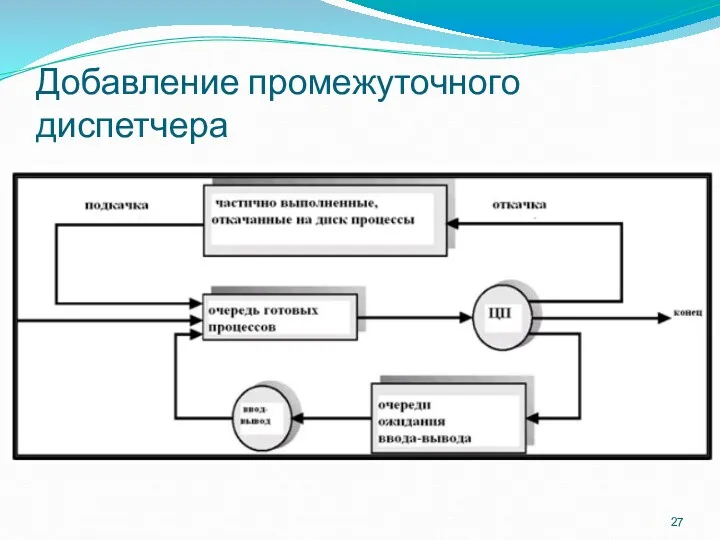
- 27. Добавление промежуточного диспетчера
- 28. Диспетчеры (продолжение) Кратковременный диспетчер вызывается очень часто (в течение ближайших миллисекунд) => должен быть очень быстрым
- 29. Переключение контекста процесса (context switch) Когда процессор переключается на другой процесс, система должна сохранить состояние старого
- 30. Создание процесса Процесс-родитель создает дочерние процессы, которые, в свою очередь, создают другие процессы, тем самым формируя
- 31. Создание процесса (продолжение) Адресное пространство Дочернего процесса копирует адресное пространство процесса-родителя У дочернего процесса имеется программа,
- 32. Дерево процессов в системе UNIX
- 33. Уничтожение процесса Процесс исполняет заключительный оператор и обращается к ОС для своей ликвидации (exit). Передача данных
- 34. Операционные системы Методы взаимодействия процессов
- 35. Взаимодействующие (cooperating) процессы Независимый процесс – не может влиять на исполнение других процессов и испытывать их
- 36. Виды процессов Подчиненный – зависит от процесса-родителя; уничтожается при его уничтожении; процесс-родитель должен ожидать завершения всех
- 37. Проблема “производитель-потребитель” (producer – consumer) Одна из парадигм взаимодействия процессов: процесс-производитель (producer) генерирует информацию, которая используется
- 38. Ограниченный буфер – реализация с помощью общей памяти Общие данные #define BUFFER_SIZE 10 typedef struct {
- 39. Ограниченный буфер: процесс-производитель item nextProduced; while (1) { while (((in + 1) % BUFFER_SIZE) == out)
- 40. Взаимодействие процессов Механизм для коммуникации процессов и синхронизации их действий. Система сообщений – процессы взаимодействуют между
- 41. Реализация взаимодействия процессов Как устанавливается связь? Можно ли установить связь более чем двух процессов? Сколько связей
- 42. Прямая связь (direct communication) Процессы именуют друг друга явно: send (P, message) – послать сообщение процессу
- 43. Косвенная связь (indirect communication) Сообщения направляются и получаются через почтовые ящики (порты) – mailboxes; ports Каждый
- 44. Косвенная связь Операции Создать новый почтовый ящик Отправить (принять) сообщение через почтовый ящик Удалить почтовый ящик
- 45. Косвенная связь Использование общего почтового ящика P1, P2, и P3 используют почтовый ящик A. P1, посылает
- 46. Синхронизация при косвенной связи Передача сообщений может выполняться с блокировкой или без блокировки Передача с блокировкой
- 47. Буферизация С коммуникационной линией связывается очередь сообщений, реализованная одним из трех способов: 1. Нулевая емкость –
- 48. Клиент-серверная взаимосвязь Сокеты (Sockets) Удаленные вызовы процедур (Remote Procedure Calls – RPC) Удаленные вызовы методов (Remote
- 49. Сокеты (Sockets) Впервые были реализованы в UNIX BSD 4.2 Сокет можно определить как отправную (конечную) точку
- 50. Взаимодействие с помощью сокетов
- 51. Удаленные вызовы процедур (RPC) RPC впервые предложен фирмой Sun и реализован в ОС Solaris Удаленный вызов
- 52. Исполнение RPC
- 53. Удаленный вызов метода (RMI) - Java Remote Method Invocation (RMI) – механизм в Java-технологии, аналогичный RPC
- 54. Выстраивание параметров (marshaling)
- 55. Операционные системы Потоки.
- 56. Однопоточные и многопоточные процессы Последовательный (однопоточный) процесс – это процесс, который имеет только один поток управления
- 57. Преимущества многопоточности Увеличение скорости (по сравнению с использованием обычных процессов). Многопоточность основана на использовании облегченных процессов
- 58. История многопоточности “Эльбрус-1” (1979) : концепция процесса соответствовала облегченному процессу в современном понимании (процесс стек) UNIX:
- 59. Пользовательские потоки (user threads) Управление потоками реализовано через библиотеку потоков пользовательского уровня Примеры - POSIX Pthreads
- 60. Потоки ядра (kernel threads) Поддержаны и используются на уровне ядра ОС Примеры - Windows 95/98/NT/2000 -
- 61. Модели многопоточности (каким образом пользовательские потоки отображаются в потоки ядра?) Много / Один (Many-to-One) Один /
- 62. Модель “много / один” Несколько потоков пользовательского уровня отображаются в один системный поток Используется в системах,
- 63. Модель “один / один” Каждый поток пользовательского уровня отображается в один системный поток Примеры - Windows
- 64. Модель “много / много” Допускает, чтобы несколько потоков пользовательского уровня могли отображаться в несколько системных потоков
- 65. Проблемы многопоточности Семантика системных вызовов fork() и exec() Прекращение потоков Обработка сигналов Группы потоков Локальные данные
- 66. Потоки POSIX (Pthreads) POSIX – Portable Operating Systems Interface of uniX kind Стандарт POSIX (IEEE 1003.1c)
- 67. Потоки в Solaris
- 68. Процесс в Solaris
- 69. Потоки в Windows 2000 Реализуют схему “один / один” Каждый поток содержит - идентификатор потока (thread
- 70. Потоки в Linux В Linux потоки называются tasks (задачами), а не threads. Поток создается системным вызовом
- 71. Потоки в Java Потоки в Java могут быть созданы следующими способами: Как расширения класса Thread Как
- 73. Скачать презентацию

Уровни абстракции ОС
Уровни абстракции ОС
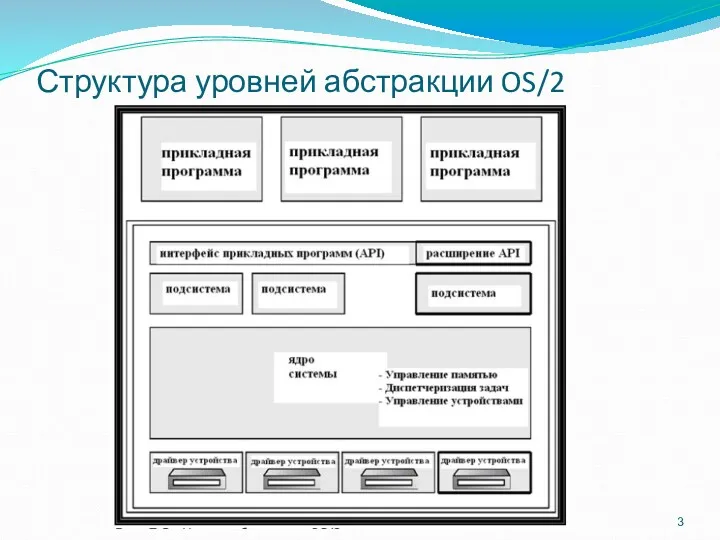
Структура уровней абстракции OS/2
Структура уровней абстракции OS/2
Структура системы с “микроядром” (micro-kernel)
Максимум модулей переносится из ядра ОС в
Структура системы с “микроядром” (micro-kernel)
Максимум модулей переносится из ядра ОС в
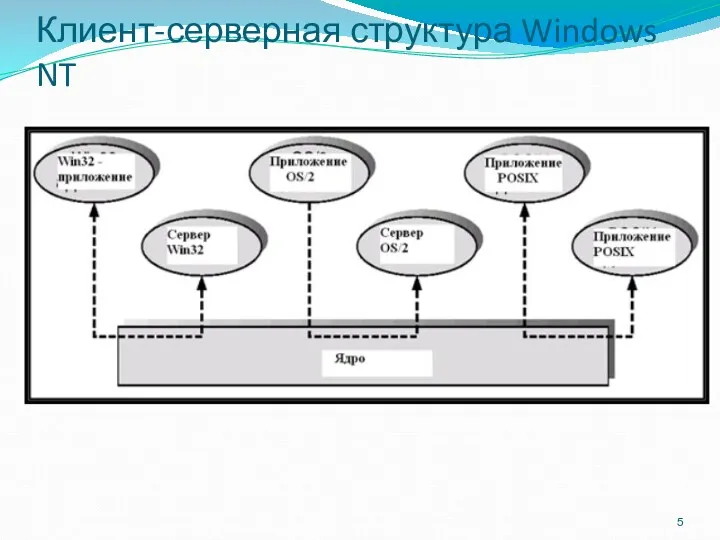
Клиент-серверная структура Windows NT
Клиент-серверная структура Windows NT
Виртуальные машины
Концепция виртуальной машины доводит подход, основанный на уровнях абстракции, до
Виртуальные машины
Концепция виртуальной машины доводит подход, основанный на уровнях абстракции, до
Виртуальные машины (продолжение)
Физические ресурсы компьютерной системы разделяются для поддержки нескольких виртуальных
Виртуальные машины (продолжение)
Физические ресурсы компьютерной системы разделяются для поддержки нескольких виртуальных
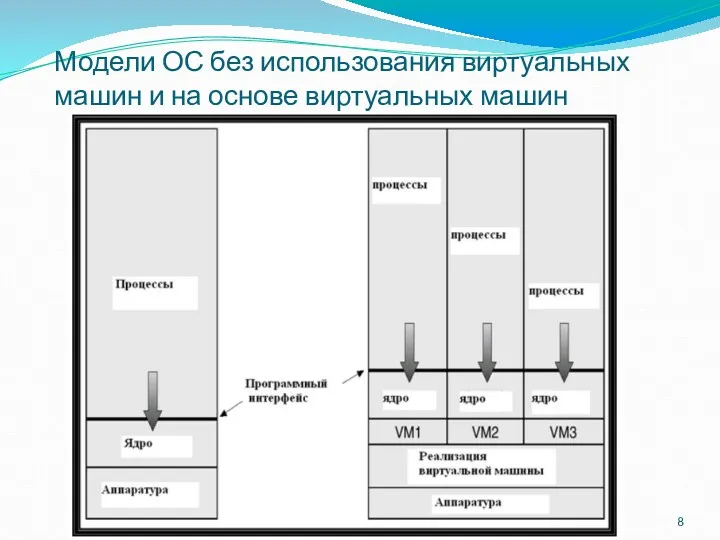
Модели ОС без использования виртуальных машин и на основе виртуальных машин
Модели ОС без использования виртуальных машин и на основе виртуальных машин
Преимущества и недостатки виртуальных машин
Концепция виртуальной машины обеспечивает полную защиту системных
Преимущества и недостатки виртуальных машин
Концепция виртуальной машины обеспечивает полную защиту системных
Виртуальная машина Java (JVM)
Программы на Java компилируются в платформно-независимый байт-код (bytecode),
Виртуальная машина Java (JVM)
Программы на Java компилируются в платформно-независимый байт-код (bytecode),
Виртуальная машина Java
Виртуальная машина Java
Цели проектирования и разработки ОС
Цели с точки зрения пользователя:
ОС должна
Цели проектирования и разработки ОС
Цели с точки зрения пользователя:
ОС должна
Механизмы (mechanisms) и политики (policies)
Механизмы – определяют, каким образом реализовать функциональность;
Механизмы (mechanisms) и политики (policies)
Механизмы – определяют, каким образом реализовать функциональность;
Реализация ОС
Традиционно ОС разрабатывались на ассемблере; теперь они могут разрабатываться на
Реализация ОС
Традиционно ОС разрабатывались на ассемблере; теперь они могут разрабатываться на
Генерация ОС (SYSGEN)
ОС проектируются с целью использования на любой машине из
Генерация ОС (SYSGEN)
ОС проектируются с целью использования на любой машине из
Операционные системы
Управление процессами.
Планирование и диспетчеризация процессов
Операционные системы
Управление процессами.
Планирование и диспетчеризация процессов
Понятие процесса
ОС исполняет множество классов программ:
Пакетная система (batch system) – задания
Понятие процесса
ОС исполняет множество классов программ:
Пакетная система (batch system) – задания
Состояния процесса
При исполнении процесс может изменять свое состояние следующим образом:
Новый (new):
Состояния процесса
При исполнении процесс может изменять свое состояние следующим образом:
Новый (new):
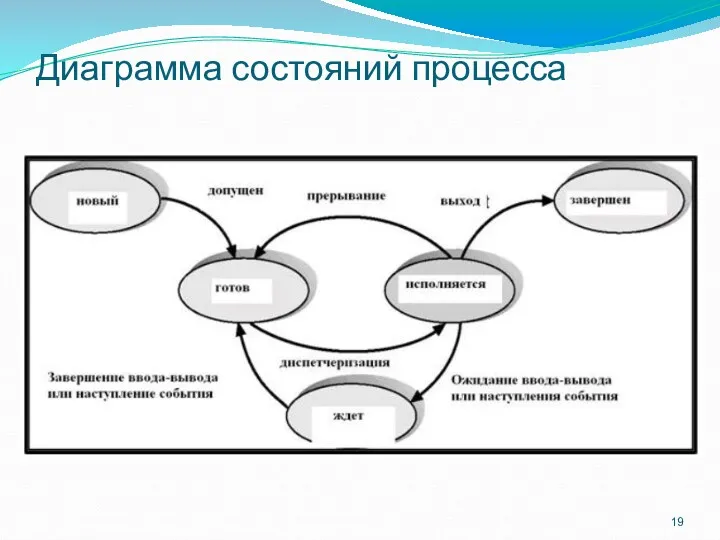
Диаграмма состояний процесса
Диаграмма состояний процесса
Блок управления процессом (Process Control Block – PCB)
Информация, ассоциируемая с каждым
Блок управления процессом (Process Control Block – PCB)
Информация, ассоциируемая с каждым
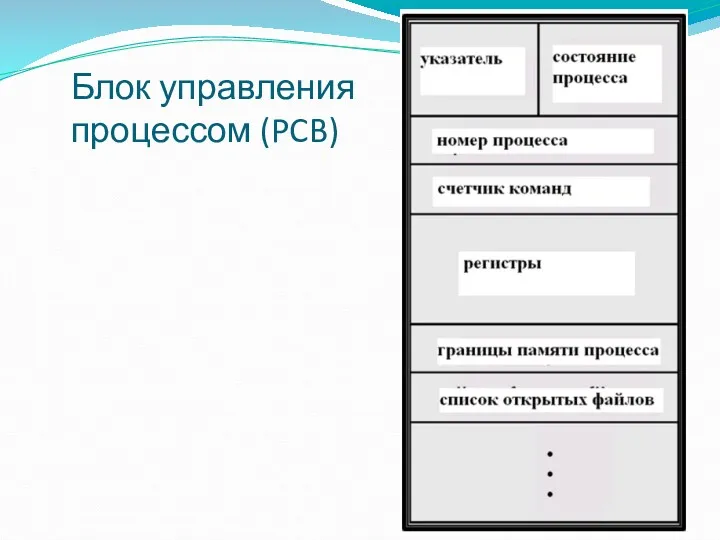
Блок управления
процессом (PCB)
Блок управления
процессом (PCB)
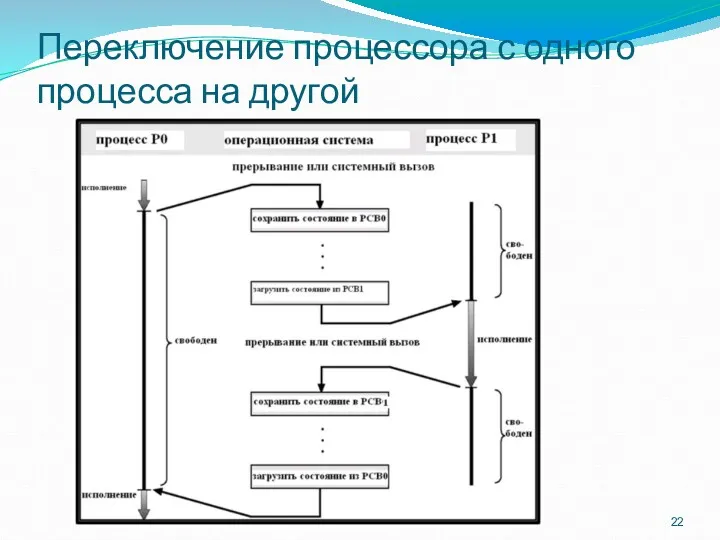
Переключение процессора с одного процесса на другой
Переключение процессора с одного процесса на другой
Очереди, связанные с диспетчеризацией процессов
Очередь заданий (Job queue) – множество всех
Очереди, связанные с диспетчеризацией процессов
Очередь заданий (Job queue) – множество всех

Очередь готовых процессов и очереди для различных устройств ввода-вывода
Очередь готовых процессов и очереди для различных устройств ввода-вывода

Графическое представление диспетчеризации процессов
Графическое представление диспетчеризации процессов
Диспетчеры
Долговременный диспетчер (диспетчер заданий) – определяет, какие процессы должны быть перемещены
Диспетчеры
Долговременный диспетчер (диспетчер заданий) – определяет, какие процессы должны быть перемещены
Добавление промежуточного диспетчера
Добавление промежуточного диспетчера
Диспетчеры (продолжение)
Кратковременный диспетчер вызывается очень часто (в течение ближайших миллисекунд) =>
Диспетчеры (продолжение)
Кратковременный диспетчер вызывается очень часто (в течение ближайших миллисекунд) =>
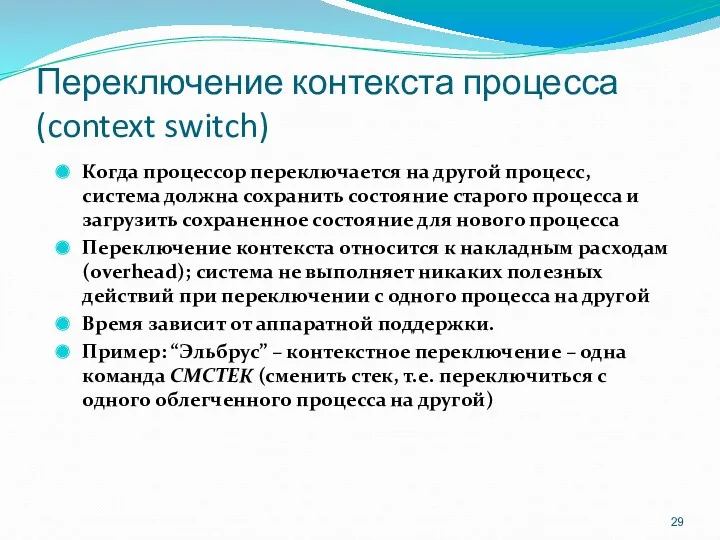
Переключение контекста процесса (context switch)
Когда процессор переключается на другой процесс, система
Переключение контекста процесса (context switch)
Когда процессор переключается на другой процесс, система
Создание процесса
Процесс-родитель создает дочерние процессы, которые, в свою очередь, создают другие
Создание процесса
Процесс-родитель создает дочерние процессы, которые, в свою очередь, создают другие
Создание процесса (продолжение)
Адресное пространство
Дочернего процесса копирует адресное пространство процесса-родителя
У дочернего процесса
Создание процесса (продолжение)
Адресное пространство
Дочернего процесса копирует адресное пространство процесса-родителя
У дочернего процесса
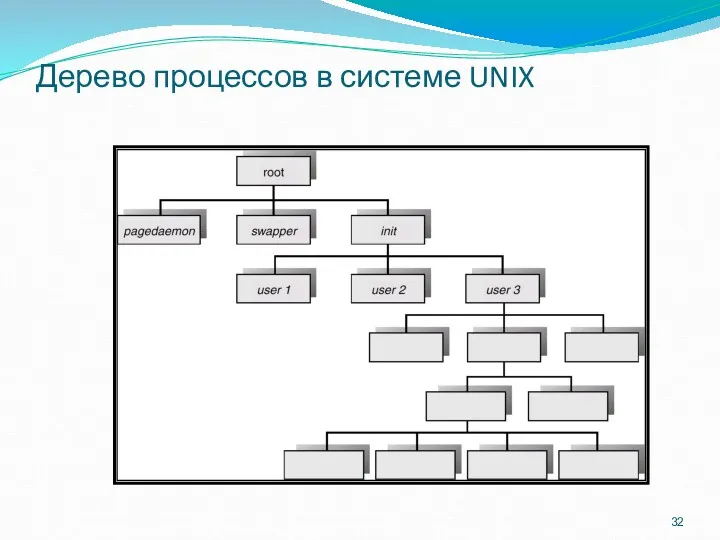
Дерево процессов в системе UNIX
Дерево процессов в системе UNIX
Уничтожение процесса
Процесс исполняет заключительный оператор и обращается к ОС для своей
Уничтожение процесса
Процесс исполняет заключительный оператор и обращается к ОС для своей
Операционные системы
Методы взаимодействия процессов
Операционные системы
Методы взаимодействия процессов
Взаимодействующие (cooperating) процессы
Независимый процесс – не может влиять на исполнение других
Взаимодействующие (cooperating) процессы
Независимый процесс – не может влиять на исполнение других
Виды процессов
Подчиненный – зависит от процесса-родителя; уничтожается при его уничтожении; процесс-родитель
Виды процессов
Подчиненный – зависит от процесса-родителя; уничтожается при его уничтожении; процесс-родитель
Проблема “производитель-потребитель” (producer – consumer)
Одна из парадигм взаимодействия процессов: процесс-производитель (producer)
Проблема “производитель-потребитель” (producer – consumer)
Одна из парадигм взаимодействия процессов: процесс-производитель (producer)
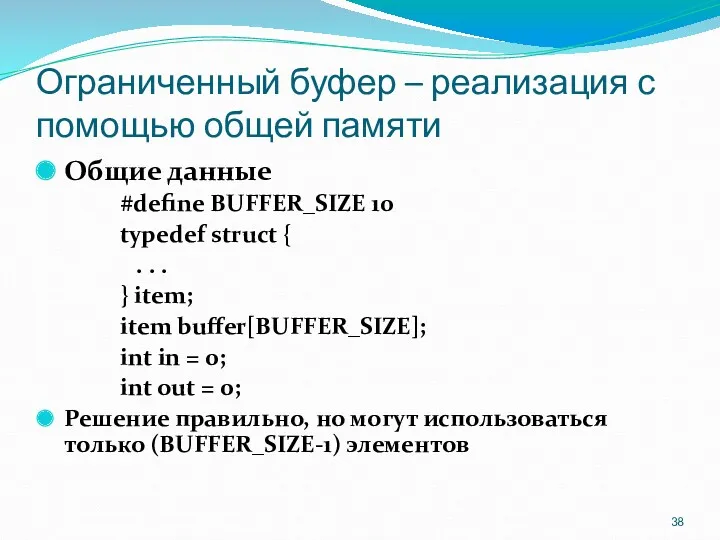
Ограниченный буфер – реализация с помощью общей памяти
Общие данные
#define BUFFER_SIZE 10
typedef
Ограниченный буфер – реализация с помощью общей памяти
Общие данные
#define BUFFER_SIZE 10
typedef
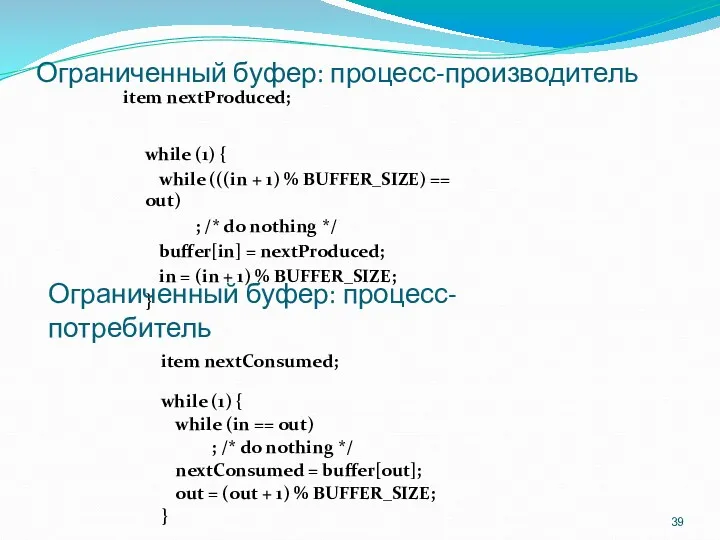
Ограниченный буфер: процесс-производитель
item nextProduced;
while (1) {
while (((in + 1) % BUFFER_SIZE)
Ограниченный буфер: процесс-производитель
item nextProduced;
while (1) {
while (((in + 1) % BUFFER_SIZE)
Взаимодействие процессов
Механизм для коммуникации процессов и синхронизации их действий.
Система сообщений –
Взаимодействие процессов
Механизм для коммуникации процессов и синхронизации их действий.
Система сообщений –
Реализация взаимодействия процессов
Как устанавливается связь?
Можно ли установить связь более чем двух
Реализация взаимодействия процессов
Как устанавливается связь?
Можно ли установить связь более чем двух

Прямая связь
(direct communication)
Процессы именуют друг друга явно:
send (P, message) –
Прямая связь
(direct communication)
Процессы именуют друг друга явно:
send (P, message) –
Косвенная связь (indirect communication)
Сообщения направляются и получаются через почтовые ящики (порты)
Косвенная связь (indirect communication)
Сообщения направляются и получаются через почтовые ящики (порты)
Косвенная связь
Операции
Создать новый почтовый ящик
Отправить (принять) сообщение через почтовый ящик
Удалить почтовый
Косвенная связь
Операции
Создать новый почтовый ящик
Отправить (принять) сообщение через почтовый ящик
Удалить почтовый
Косвенная связь
Использование общего почтового ящика
P1, P2, и P3 используют почтовый ящик
Косвенная связь
Использование общего почтового ящика
P1, P2, и P3 используют почтовый ящик
Синхронизация при косвенной связи
Передача сообщений может выполняться с блокировкой или без
Синхронизация при косвенной связи
Передача сообщений может выполняться с блокировкой или без
Буферизация
С коммуникационной линией связывается очередь сообщений, реализованная одним из трех способов:
1. Нулевая
Буферизация
С коммуникационной линией связывается очередь сообщений, реализованная одним из трех способов:
1. Нулевая
Клиент-серверная взаимосвязь
Сокеты (Sockets)
Удаленные вызовы процедур (Remote Procedure Calls – RPC)
Удаленные вызовы
Клиент-серверная взаимосвязь
Сокеты (Sockets)
Удаленные вызовы процедур (Remote Procedure Calls – RPC)
Удаленные вызовы
Сокеты (Sockets)
Впервые были реализованы в UNIX BSD 4.2
Сокет можно определить как
Сокеты (Sockets)
Впервые были реализованы в UNIX BSD 4.2
Сокет можно определить как

Взаимодействие с помощью сокетов
Взаимодействие с помощью сокетов
Удаленные вызовы процедур (RPC)
RPC впервые предложен фирмой Sun и реализован в
Удаленные вызовы процедур (RPC)
RPC впервые предложен фирмой Sun и реализован в
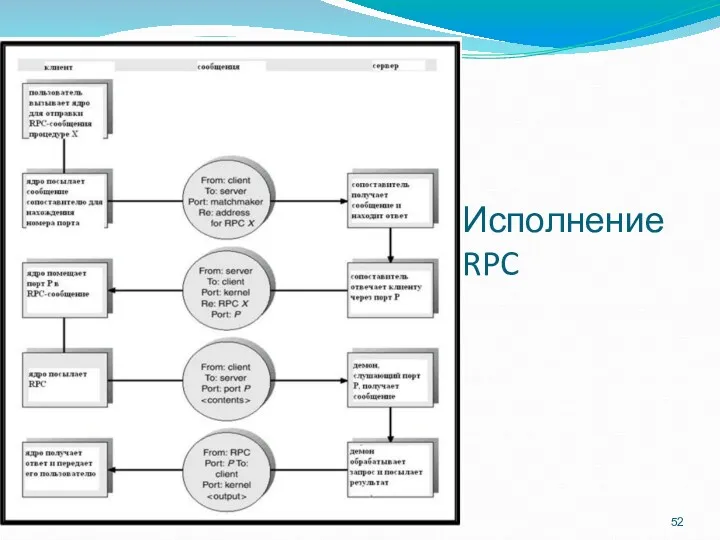
Исполнение RPC
Исполнение RPC
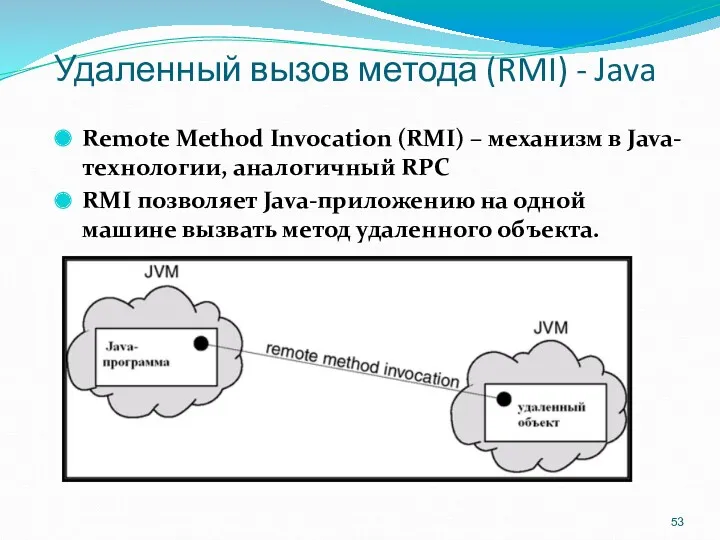
Удаленный вызов метода (RMI) - Java
Remote Method Invocation (RMI) – механизм
Удаленный вызов метода (RMI) - Java
Remote Method Invocation (RMI) – механизм

Выстраивание параметров (marshaling)
Выстраивание параметров (marshaling)
Операционные системы
Потоки.
Операционные системы
Потоки.
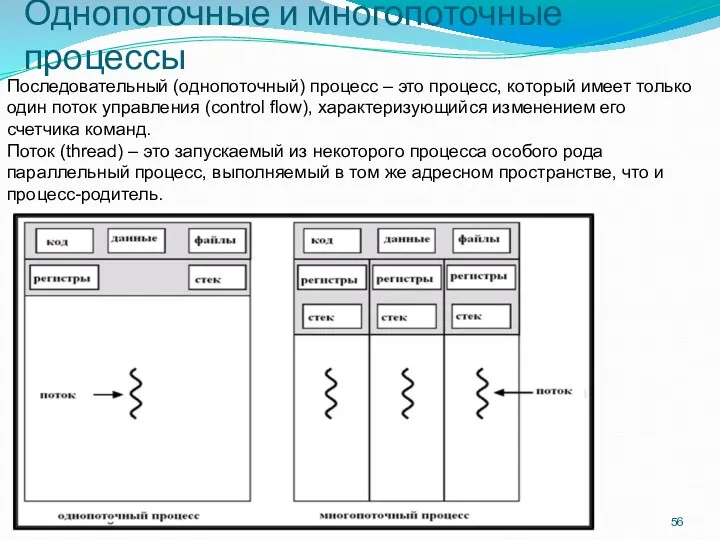
Однопоточные и многопоточные процессы
Последовательный (однопоточный) процесс – это процесс, который имеет
Однопоточные и многопоточные процессы
Последовательный (однопоточный) процесс – это процесс, который имеет
Преимущества многопоточности
Увеличение скорости (по сравнению с использованием обычных процессов). Многопоточность основана
Преимущества многопоточности
Увеличение скорости (по сравнению с использованием обычных процессов). Многопоточность основана
История многопоточности
“Эльбрус-1” (1979) : концепция процесса соответствовала облегченному процессу в современном
История многопоточности
“Эльбрус-1” (1979) : концепция процесса соответствовала облегченному процессу в современном
Пользовательские потоки (user threads)
Управление потоками реализовано через библиотеку потоков пользовательского уровня
Примеры
-
Пользовательские потоки (user threads)
Управление потоками реализовано через библиотеку потоков пользовательского уровня
Примеры
-
Потоки ядра (kernel threads)
Поддержаны и используются на уровне ядра ОС
Примеры
- Windows
Потоки ядра (kernel threads)
Поддержаны и используются на уровне ядра ОС
Примеры
- Windows
Модели многопоточности
(каким образом пользовательские потоки отображаются в потоки ядра?)
Много / Один
Модели многопоточности
(каким образом пользовательские потоки отображаются в потоки ядра?)
Много / Один

Модель “много / один”
Несколько потоков пользовательского уровня отображаются в один системный
Модель “много / один”
Несколько потоков пользовательского уровня отображаются в один системный
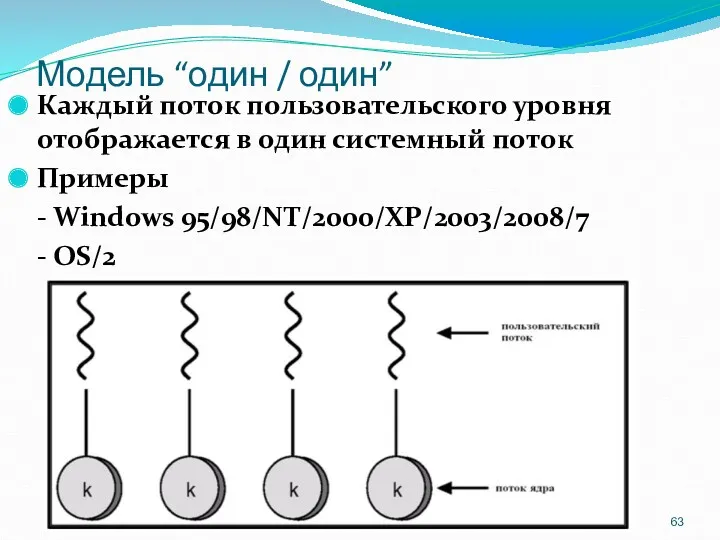
Модель “один / один”
Каждый поток пользовательского уровня отображается в один системный
Модель “один / один”
Каждый поток пользовательского уровня отображается в один системный

Модель “много / много”
Допускает, чтобы несколько потоков пользовательского уровня могли отображаться
Модель “много / много”
Допускает, чтобы несколько потоков пользовательского уровня могли отображаться
Проблемы многопоточности
Семантика системных вызовов fork() и exec()
Прекращение потоков
Обработка сигналов
Группы потоков
Локальные данные
Проблемы многопоточности
Семантика системных вызовов fork() и exec()
Прекращение потоков
Обработка сигналов
Группы потоков
Локальные данные
Потоки POSIX (Pthreads)
POSIX – Portable Operating Systems Interface of uniX kind
Стандарт
Потоки POSIX (Pthreads)
POSIX – Portable Operating Systems Interface of uniX kind
Стандарт
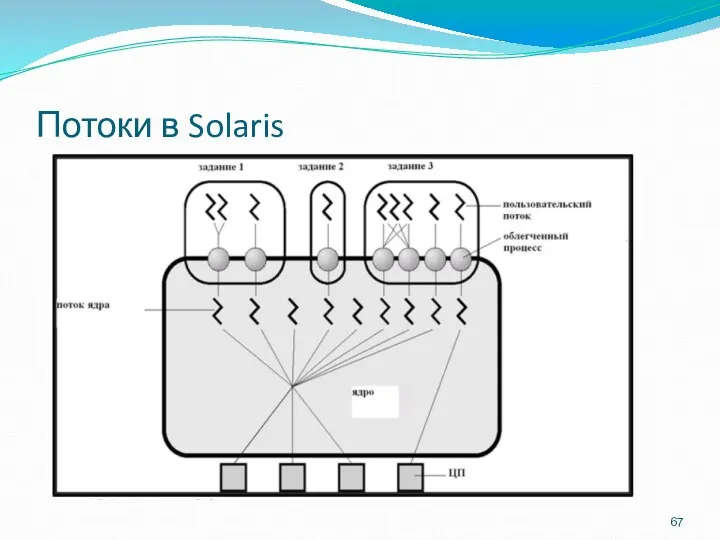
Потоки в Solaris
Потоки в Solaris
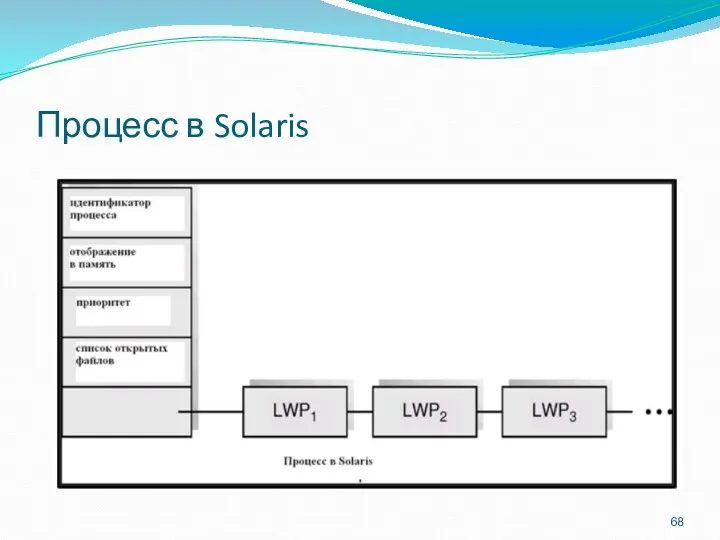
Процесс в Solaris
Процесс в Solaris
Потоки в Windows 2000
Реализуют схему “один / один”
Каждый поток содержит
-
Потоки в Windows 2000
Реализуют схему “один / один”
Каждый поток содержит
-
Потоки в Linux
В Linux потоки называются tasks (задачами), а не threads.
Поток
Потоки в Linux
В Linux потоки называются tasks (задачами), а не threads.
Поток
Потоки в Java
Потоки в Java могут быть созданы следующими способами:
Как расширения
Потоки в Java
Потоки в Java могут быть созданы следующими способами:
Как расширения
 Задачи по информатике
Задачи по информатике Программа Cocos. Инструкция к пользованию
Программа Cocos. Инструкция к пользованию Характеристика СПС: Консультант плюс, Гарант, Кодекс
Характеристика СПС: Консультант плюс, Гарант, Кодекс Информационная безопасность
Информационная безопасность Основные методы внедрения и анализа функционирования программного обеспечения и компьютерной системы
Основные методы внедрения и анализа функционирования программного обеспечения и компьютерной системы Технологии баз данных
Технологии баз данных Состав ПК. Компьютерная система
Состав ПК. Компьютерная система Автоматизоване створення й підтримка веб-ресурсів. Технології Веб 2.0. Структура веб-сайтів, різновиди веб-сторінок
Автоматизоване створення й підтримка веб-ресурсів. Технології Веб 2.0. Структура веб-сайтів, різновиди веб-сторінок Python. Функции
Python. Функции Виды массивов
Виды массивов Есептеу жүйелері және желілік ұйымдастыру. Стандартты бағдарламалар кітапханасы және ассемблер
Есептеу жүйелері және желілік ұйымдастыру. Стандартты бағдарламалар кітапханасы және ассемблер Понятие IP-адреса. 1
Понятие IP-адреса. 1 Устройства вывода информации
Устройства вывода информации Научно-образовательные ресурсы рунета
Научно-образовательные ресурсы рунета Информация в неживой и живой природе
Информация в неживой и живой природе Википедия и культурное наследие. Взаимодействие вики-сообществ и учреждений культуры для продвижения культурного наследия
Википедия и культурное наследие. Взаимодействие вики-сообществ и учреждений культуры для продвижения культурного наследия Системы счисления. Арифметические действия
Системы счисления. Арифметические действия Регистрация ККТ через личный кабинет ФНС
Регистрация ККТ через личный кабинет ФНС Информационные сети TCP\IP
Информационные сети TCP\IP Структуры данных. Диаграмма потоков данных
Структуры данных. Диаграмма потоков данных Урок 20
Урок 20 Основные операторы языка С++. Лекция 2.2
Основные операторы языка С++. Лекция 2.2 Input device
Input device Роль теории графов в программировании и информатике
Роль теории графов в программировании и информатике Гостехкомиссия и её роль в обеспечении информационной безопасности в РФ
Гостехкомиссия и её роль в обеспечении информационной безопасности в РФ Майкл Бэнг и Ася. Отчет за год по продвижению в социальных сетях:
Майкл Бэнг и Ася. Отчет за год по продвижению в социальных сетях: Табличный процессор Excel. Часть 1
Табличный процессор Excel. Часть 1 Проектирование информационных систем. Информационные технологии
Проектирование информационных систем. Информационные технологии