Основы теории линейного программирования Виды задач линейного программирования Общая задача линейного программирования (ЗЛП) презентация
- Основы теории линейного программирования Виды задач линейного программирования Общая задача линейного программирования (ЗЛП)

Содержание
- 2. (2) и прямых ограничений на переменные: (3) Ri – один из возможных знаков отношений
- 3. cj , bi , aij – заданные вещественные числа, Числа сj – коэффициенты целевой функции; элементы
- 4. Производственная задача. Предприятие может изготавливать n видов продукции, используя m видов ресурсов, запасы которых ограничены. Прибыль
- 5. xj количество единиц продукции j-го вида, запланированных к производству. Тогда прибыль: , (4) Для изготовления всей
- 6. Выпуск продукции не может быть отрицательным: (6) Построенная экономико-математическая модель (4), (5), (6) называется многопродуктовой моделью
- 7. Пусть на предприятии выпускается один продукт разными технологическими способами. Количество технологических способов: n. аij характеризуют нормативный
- 8. Экономико-математическая модель этой задачи будет идентична модели (4), (5), (6). Но в этом случае она будет
- 9. Характеристика стандартной формы записи ЗЛП: Целевая функция стремится к максимуму. Все непрямые (структурные) ограничения имеют знаки
- 10. – технологическая матрица коэффициентов – вектор удельной прибыли от реализации продукции – вектор запасов ресурсов
- 11. – вектор переменных – матричная форма записи стандартной ЗЛП: (c, x) означает скалярное произведение векторов c
- 12. Векторная форма записи стандартной ЗЛП получится, если введем обозначение векторов матрицы системы ограничений – векторная форма
- 13. Общая ЗЛП может быть легко сведена к стандартной форме записи при помощи четырех действий: Структурные ограничения
- 14. Если в общей ЗЛП целевая функция стремиться к минимуму, нужно ее умножить на (-1). Полученная целевая
- 15. В стандартной форме записи ЗЛП переменные неотрицательные. Поэтому, если в общей ЗЛП переменная xs не определена
- 16. П р и м е р. Введем две новые неотрицательные переменные и выразим через них x3
- 17. Вычтем из второго ограничения переменную x4 ≥ 0 и умножим третье ограничение на (-1). Тогда стандартная
- 18. Каноническая форма записи ЗЛП имеет следующий вид: (7) (8) (9)
- 19. Характеристика канонической формы записи ЗЛП: Целевая функция стремится к максимуму. Непрямые (структурные) ограничения имеют знаки отношений
- 20. В канонической ЗЛП всегда число ограничений строго меньше числа переменных, m а) если m = n,
- 21. Сведение стандартной формы ЗЛП к канонической. Введем дополнительную переменную xn+i : (10) (11) Из (10) следует,
- 22. - матрица коэффициентов системы Введение дополнительных переменных в стандартную форму ЗЛП преобразовывает ЗЛП (12) в ЗЛП
- 23. x = ( x1, x2,…, xn ) – вектор переменных задачи (12); – вектор переменных ЗЛП
- 24. Основные определения Рассмотрим ЗЛП в стандартной форме (14) и ЗЛП в канонической форме (15). (14) (15)
- 25. Опр.2 Множество векторов называется множеством допустимых планов задачи (15) или допустимым множеством. Опр.3 Вектор планов) называется
- 26. Замечание. Неотрицательные переменные в допустимом плане могут быть расположены в произвольном порядке. Опр.5 Число положительных компонент
- 27. Обозначим множество индексов тогда базис будем обозначать таким образом через σ, или просто Аσ . Векторы
- 28. (16) Опр.8 Пусть – допустимый план ЗЛП (16) и σ – его носитель. Если векторы Ai
- 29. Базисный план называется невырожденным, если Базисный план называется вырожденным, если =m. П р и м е
- 31. Скачать презентацию
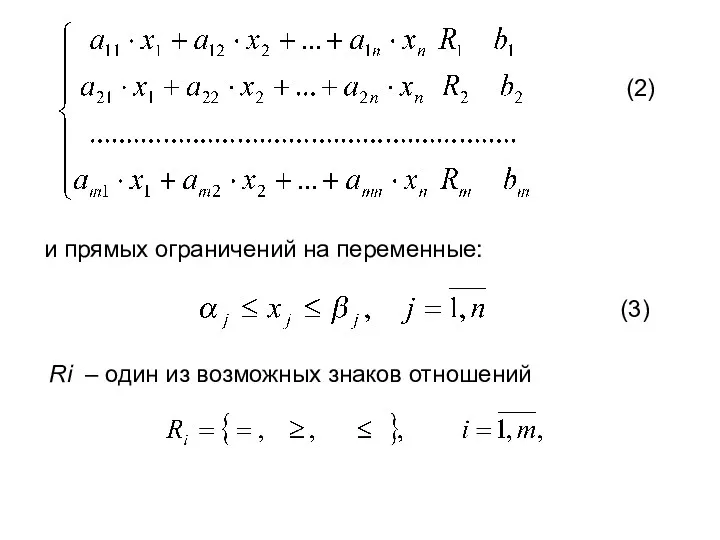
(2)
и прямых ограничений на переменные:
(3)
Ri – один из возможных знаков отношений
(2)
и прямых ограничений на переменные:
(3)
Ri – один из возможных знаков отношений
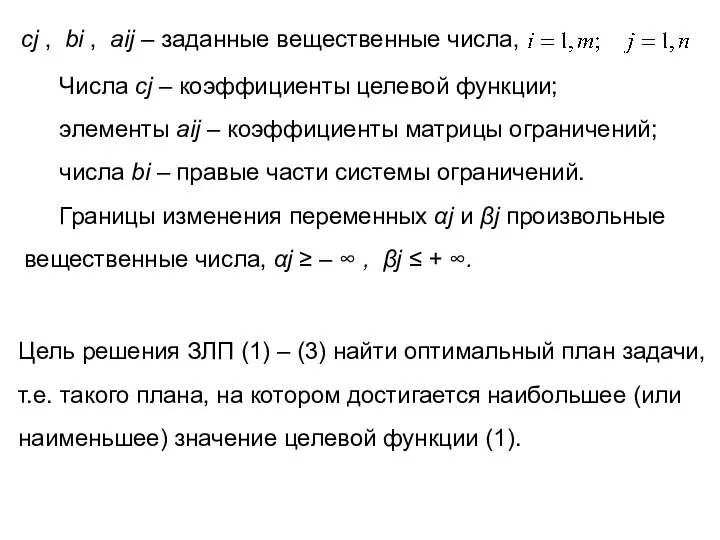
cj , bi , aij – заданные вещественные числа,
Числа сj
cj , bi , aij – заданные вещественные числа,
Числа сj
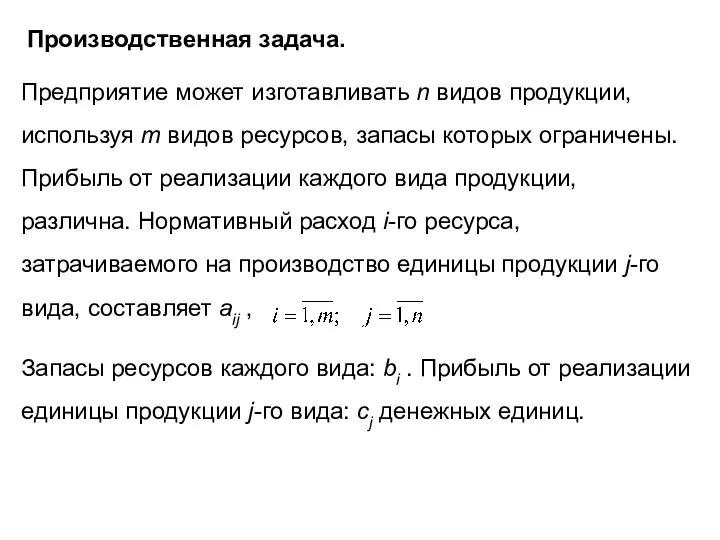
Производственная задача.
Предприятие может изготавливать n видов продукции, используя m видов ресурсов,
Производственная задача.
Предприятие может изготавливать n видов продукции, используя m видов ресурсов,
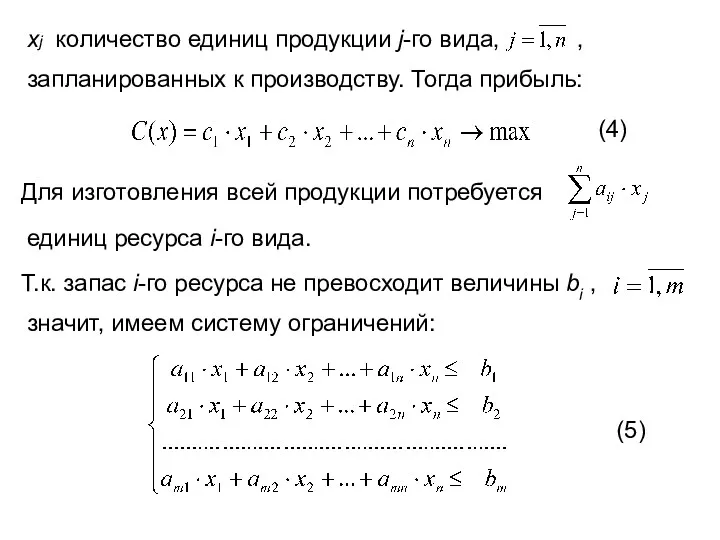
xj количество единиц продукции j-го вида,
запланированных к производству. Тогда прибыль:
xj количество единиц продукции j-го вида,
запланированных к производству. Тогда прибыль:

Выпуск продукции не может быть отрицательным:
(6)
Построенная экономико-математическая модель (4), (5), (6)
Выпуск продукции не может быть отрицательным:
(6)
Построенная экономико-математическая модель (4), (5), (6)

Пусть на предприятии выпускается один продукт разными технологическими способами. Количество технологических
Пусть на предприятии выпускается один продукт разными технологическими способами. Количество технологических
Экономико-математическая модель этой задачи будет идентична модели (4), (5), (6). Но
Экономико-математическая модель этой задачи будет идентична модели (4), (5), (6). Но
Характеристика стандартной формы записи ЗЛП:
Целевая функция стремится к максимуму.
Все непрямые (структурные)
Характеристика стандартной формы записи ЗЛП:
Целевая функция стремится к максимуму.
Все непрямые (структурные)
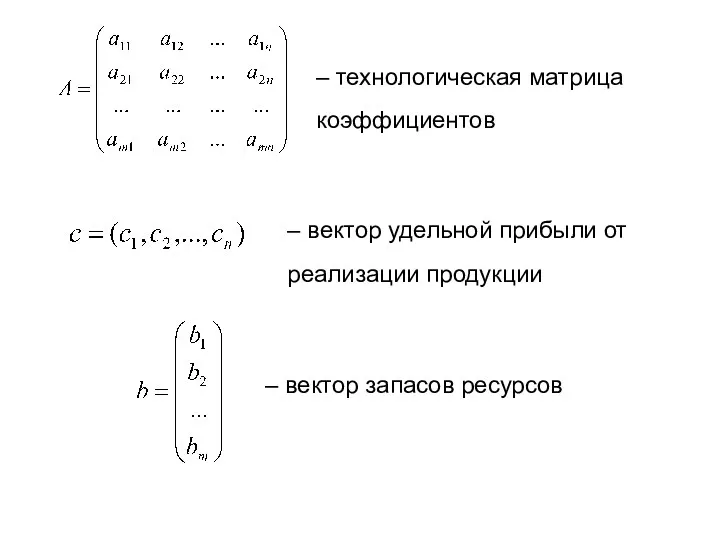
– технологическая матрица коэффициентов
– вектор удельной прибыли от реализации продукции
– технологическая матрица коэффициентов
– вектор удельной прибыли от реализации продукции
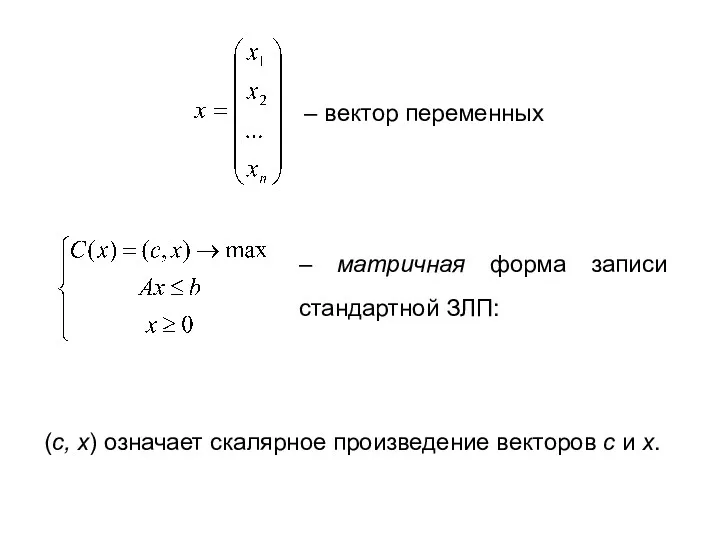
– вектор переменных
– матричная форма записи стандартной ЗЛП:
(c, x) означает
– вектор переменных
– матричная форма записи стандартной ЗЛП:
(c, x) означает
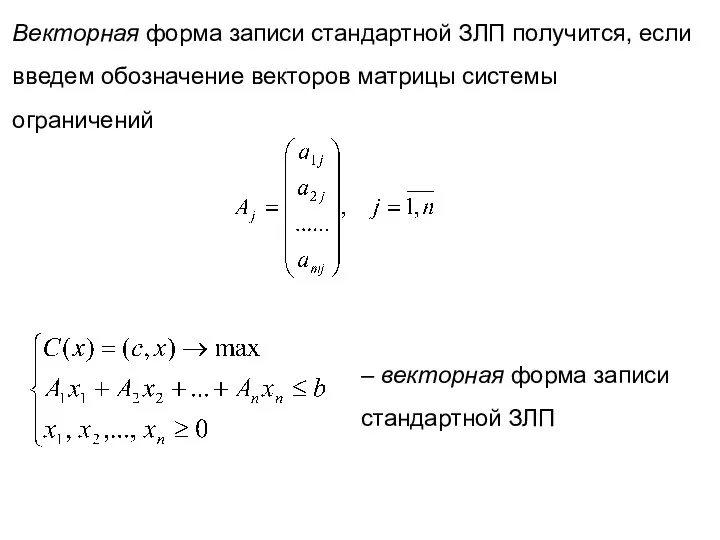
Векторная форма записи стандартной ЗЛП получится, если введем обозначение векторов матрицы
Векторная форма записи стандартной ЗЛП получится, если введем обозначение векторов матрицы
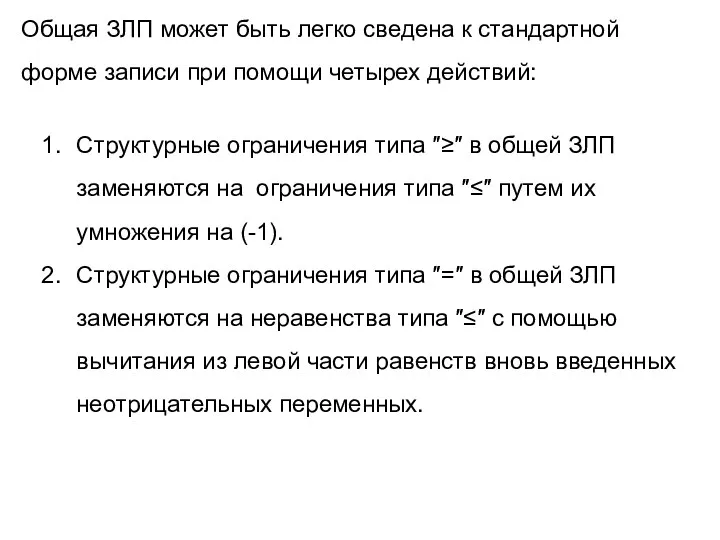
Общая ЗЛП может быть легко сведена к стандартной форме записи при
Общая ЗЛП может быть легко сведена к стандартной форме записи при
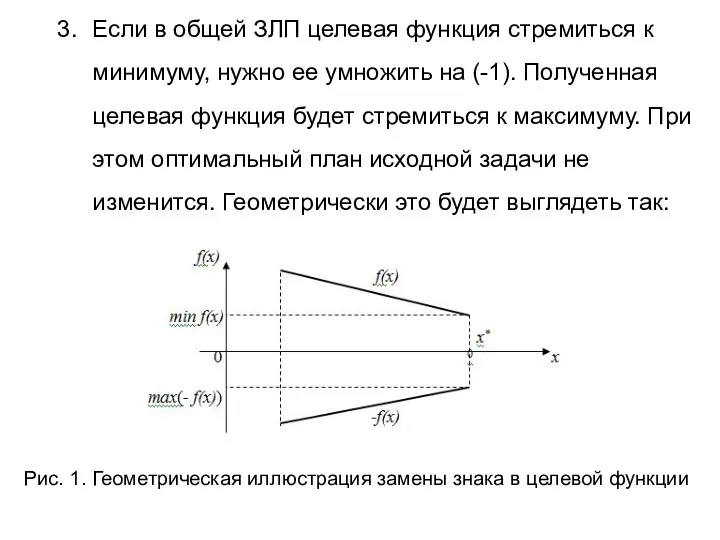
Если в общей ЗЛП целевая функция стремиться к минимуму, нужно ее
Если в общей ЗЛП целевая функция стремиться к минимуму, нужно ее

В стандартной форме записи ЗЛП переменные неотрицательные. Поэтому, если в общей
В стандартной форме записи ЗЛП переменные неотрицательные. Поэтому, если в общей
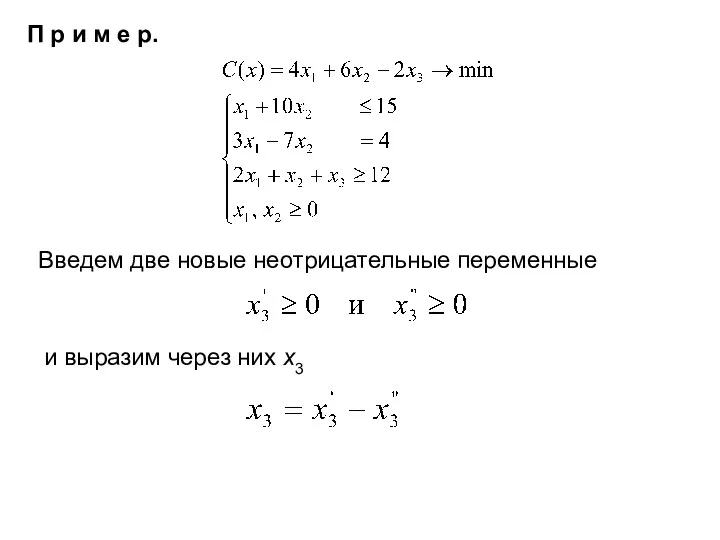
П р и м е р.
Введем две новые неотрицательные переменные
П р и м е р.
Введем две новые неотрицательные переменные

Вычтем из второго ограничения переменную x4 ≥ 0 и умножим третье
Вычтем из второго ограничения переменную x4 ≥ 0 и умножим третье
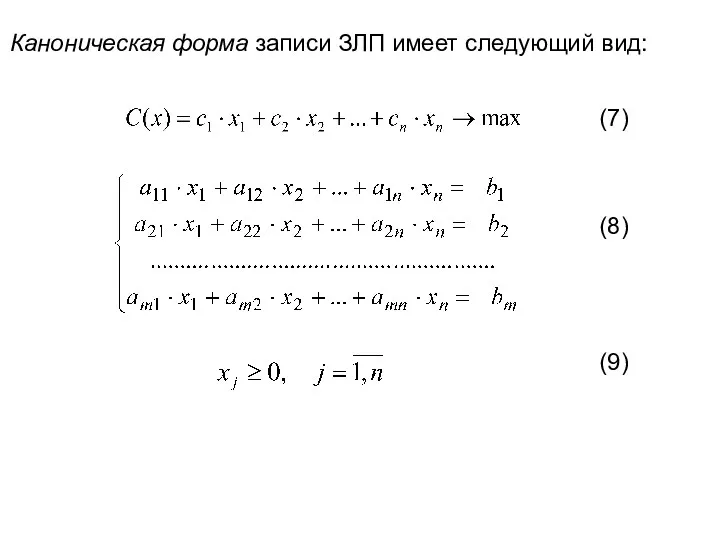
Каноническая форма записи ЗЛП имеет следующий вид:
(7)
(8)
(9)
Каноническая форма записи ЗЛП имеет следующий вид:
(7)
(8)
(9)
Характеристика канонической формы записи ЗЛП:
Целевая функция стремится к максимуму.
Непрямые (структурные) ограничения
Характеристика канонической формы записи ЗЛП:
Целевая функция стремится к максимуму.
Непрямые (структурные) ограничения
В канонической ЗЛП всегда число ограничений строго меньше числа переменных, m
В канонической ЗЛП всегда число ограничений строго меньше числа переменных, m
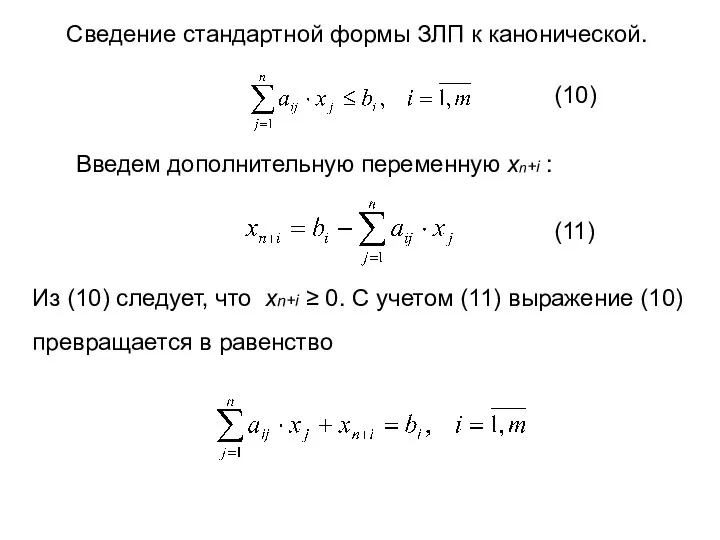
Сведение стандартной формы ЗЛП к канонической.
Введем дополнительную переменную xn+i :
Сведение стандартной формы ЗЛП к канонической.
Введем дополнительную переменную xn+i :
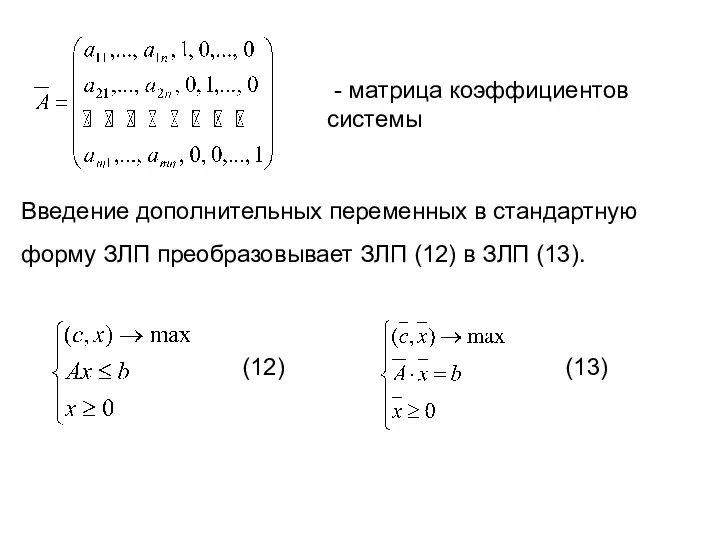
- матрица коэффициентов системы
Введение дополнительных переменных в стандартную форму
- матрица коэффициентов системы
Введение дополнительных переменных в стандартную форму
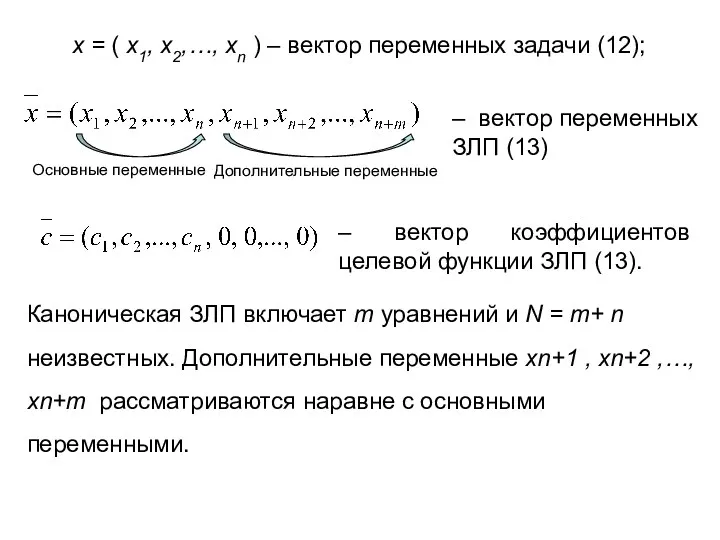
x = ( x1, x2,…, xn ) – вектор переменных задачи
x = ( x1, x2,…, xn ) – вектор переменных задачи
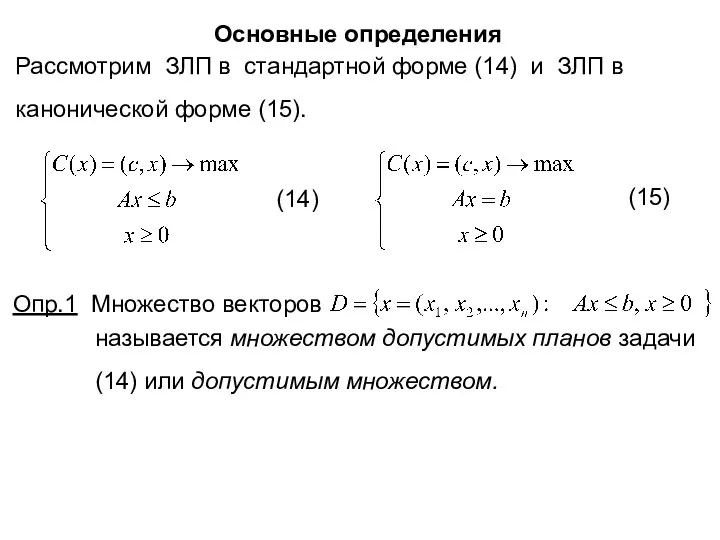
Основные определения
Рассмотрим ЗЛП в стандартной форме (14) и ЗЛП в
Основные определения
Рассмотрим ЗЛП в стандартной форме (14) и ЗЛП в
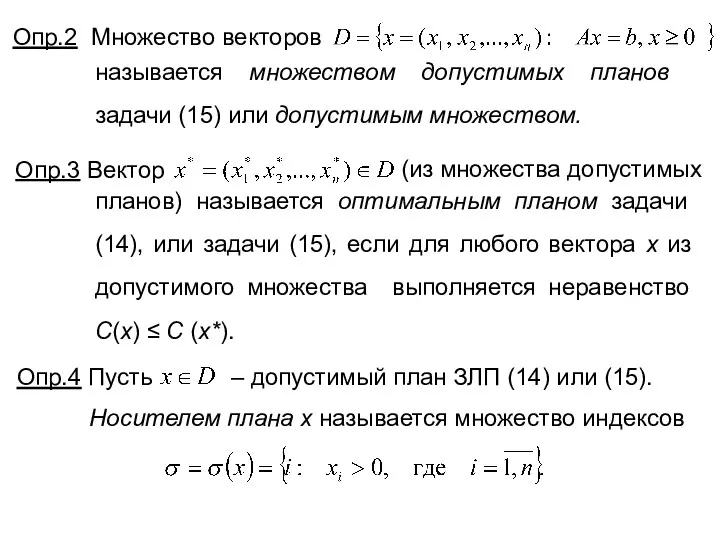
Опр.2 Множество векторов
называется множеством допустимых планов задачи (15) или допустимым
Опр.2 Множество векторов
называется множеством допустимых планов задачи (15) или допустимым
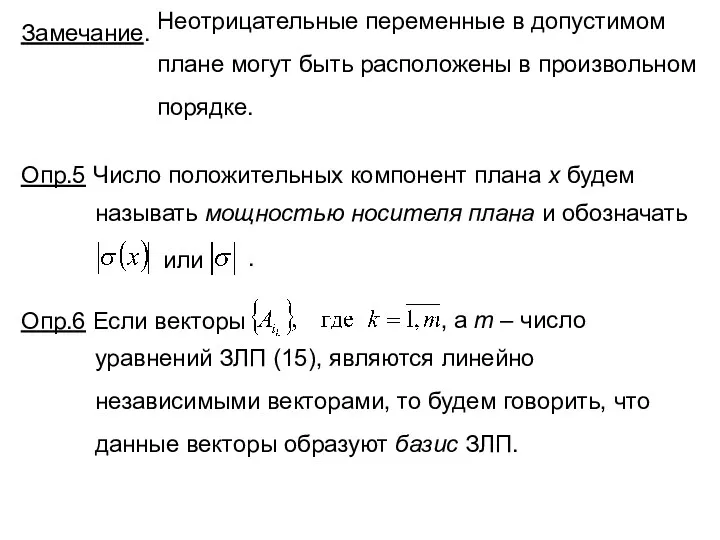
Замечание.
Неотрицательные переменные в допустимом плане могут быть расположены в произвольном порядке.
Опр.5
Замечание.
Неотрицательные переменные в допустимом плане могут быть расположены в произвольном порядке.
Опр.5
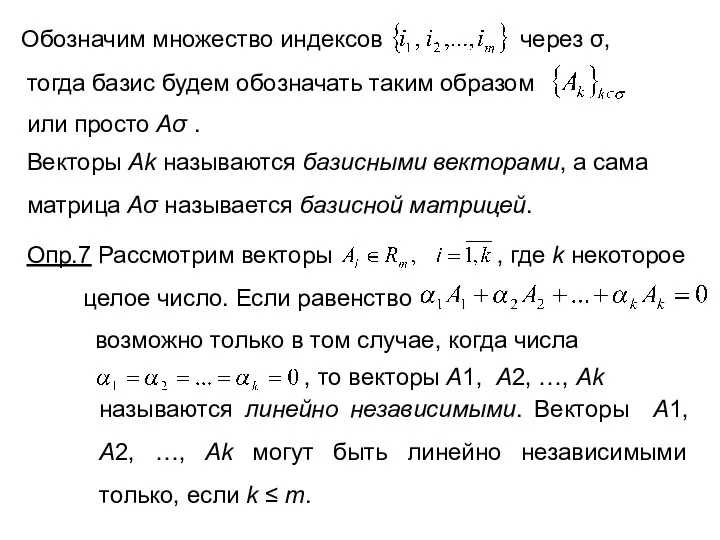
Обозначим множество индексов
тогда базис будем обозначать таким образом
через σ,
или
Обозначим множество индексов
тогда базис будем обозначать таким образом
через σ,
или
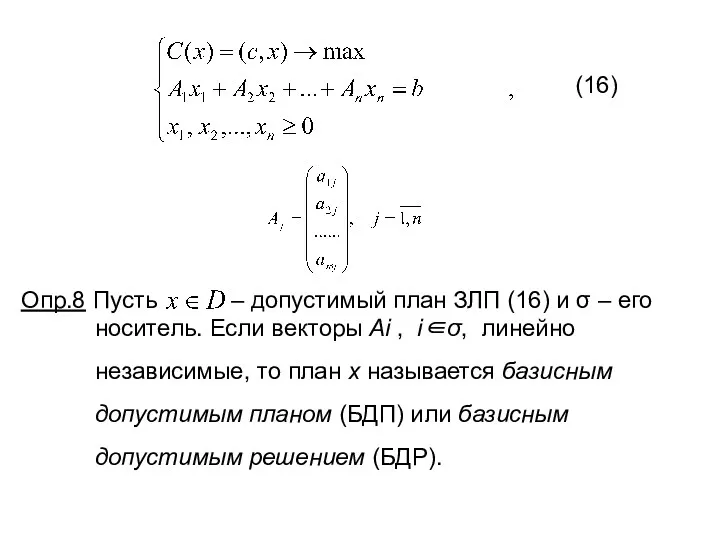
(16)
Опр.8 Пусть
– допустимый план ЗЛП (16) и σ – его
носитель.
(16)
Опр.8 Пусть
– допустимый план ЗЛП (16) и σ – его
носитель.

Базисный план называется невырожденным, если
Базисный план называется вырожденным, если
=m.
<
Базисный план называется невырожденным, если
Базисный план называется вырожденным, если
=m.
<
 Accomodation operations. Room cleaning sequence and cleaning types
Accomodation operations. Room cleaning sequence and cleaning types Числовые типы данных. Стандартные функции языка Python
Числовые типы данных. Стандартные функции языка Python Флипчарт для интерактивной доски Promethean Planet к уроку информатики 6 класс
Флипчарт для интерактивной доски Promethean Planet к уроку информатики 6 класс Тема 1. Введение в теорию баз данных
Тема 1. Введение в теорию баз данных Презентация Циклический алгоритм
Презентация Циклический алгоритм Измерение информации
Измерение информации Іздеу жүйелері
Іздеу жүйелері Социальные сети
Социальные сети ООП. Наследование и полиморфизм. Тема 05
ООП. Наследование и полиморфизм. Тема 05 Работа в сети интернет
Работа в сети интернет Программирование ветвлений
Программирование ветвлений Строки. Кодировка ASCII
Строки. Кодировка ASCII Анализ современной системы лицензирования сетевого программного обеспечения
Анализ современной системы лицензирования сетевого программного обеспечения Influence of video name blurring onto its YouTube search result ranking - SeeZisLab
Influence of video name blurring onto its YouTube search result ranking - SeeZisLab Моделирование. Математическое моделирование
Моделирование. Математическое моделирование Игровая среда программирования Scratch
Игровая среда программирования Scratch Роль Big Data в управлении рисками: развитие умного страхования
Роль Big Data в управлении рисками: развитие умного страхования Объектно – ориентированное программирование (ООП). Лекция 8
Объектно – ориентированное программирование (ООП). Лекция 8 Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10
Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10 Одномерные массивы в языке программирования Паскаль. Составление программ.
Одномерные массивы в языке программирования Паскаль. Составление программ. Программирование на языке Python. § 54. Введение в язык Python
Программирование на языке Python. § 54. Введение в язык Python Обзор вариантов установки программ
Обзор вариантов установки программ Объектно-ориентированное проектирование ИС
Объектно-ориентированное проектирование ИС Использование компьютерного сленга в речи школьников
Использование компьютерного сленга в речи школьников Положительное и отрицательное влияние сети Интернет
Положительное и отрицательное влияние сети Интернет Oracle Data Encryption
Oracle Data Encryption Перевод чисел из десятичной СС в любую другую
Перевод чисел из десятичной СС в любую другую Оператори циклу for, while, do while
Оператори циклу for, while, do while