- Познание и моделирование

Содержание
- 2. Познание и моделирование «Вся эволюция организмов и история человечества связана с информацией и моделями» Акад. Н.М.
- 3. Вопросы к экзамену Цель и задачи курса. Роль приборно-технологического моделирования в проектировании интегральных микросхем Типы и
- 4. Цель дисциплины формирование знаний в области математического моделирования технологических процессов микро- и наноэлектроники, позволяющих глубже понимать
- 5. IEDM2010.- 367-370 Математическое моделирование как часть технологического развития
- 6. Задачи дисциплины: изучение основных физических явлений, используемых в процессах формирования элементов интегральных схем; математическое описание этих
- 7. Задачи дисциплины (продолжение): формирование навыков по проведению численного моделирования процессов формирования основных интегральных структур, технологических маршрутов
- 8. Формируемая профессиональная компетенция/подкомпетенция: готовность выполнять расчет и проектирование электронных приборов, схем и устройств различного функционального назначения
- 9. Intel's 90nm nMOS
- 10. Intel's 90nm pMOS transistor
- 11. 25 нм КНИ МОП-транзистор 978-1-4244-7419-6/10/$26.00 ©2010 IEEE
- 12. Суб 100 нм МОП транзисторы с механически напряженным кремнием n – МДП транзистор с механически напряженным
- 13. Трехмерная модель МДП-транзистора КНИ-типа (32 нм) IEEE TRANSACTIONS ON ELECTRON DEVICES, VOL. 58, NO. 8, AUGUST
- 14. Функция распределения порогового напряжения с учетом разброса фокуса и дозы в процессе литографии IEEE TRANSACTIONS ON
- 15. Моделирование базового технологического маршрута КМДП ИС активные островки P - карман осаждение поликремния осаждение титана Окончательное
- 16. Виртуальный эксперимент: автоматизированное рабочее место Sentaurus Workbench Варьируются длина канала n-МДП транзистора, определяемая параметром endGate, доза
- 17. Численное моделирование 1-3 часа Опытное производство 1/3 года
- 18. Литература: Технология, конструкции и методы моделирования кремниевых интегральных микросхем. М.А. Королев, Т.Ю. Крупкина. М.А. Ревелева. Под
- 19. Классификация моделей технологических операций по виду производственной операции ионная имплантация; окисление, силицидизация; эпитаксия; отжиг; травление /
- 20. Примеры различных типов моделей.
- 21. Функциональный состав моделей технологических операций
- 22. Теоретические основы процесса ионной имплантации В основе теории ионной имплантации лежит исследование и расчет потерь энергии
- 23. Механизмы торможения ионов Торможение является результатом столкновений быстрых заряженных имплантируемых частиц с твердым телом. Одновременно возникают
- 24. Энергетическая зависимость электронного и ядерного торможения. При высоких энергиях ионов преобладает электронное торможение – неупругие столкновения
- 25. Теория Линдхарда, Шарффа и Шиотта (ЛШШ) Ядерная тормозная способность рассматривается как результат последовательности независимых упругих двухчастичных
- 26. Электронная тормозная способность в теории ЛШШ вычисляется в приближении свободного электронного газа. Эффективность торможения пропорциональна скорости
- 27. Диффузионная модель Бирсака В теории Бирсака учитывается изменение направления движения иона после каждого столкновения. При торможении
- 28. Теория Бирсака позволяет вычислить длину проективного пробега, не рассчитывая явно функцию распределения для ψ или η.
- 29. Эффект каналирования Вследствие кристаллической природы полупроводников ионы могут проникнуть в них значительно глубже, если имплантация производится
- 30. Схематическое представление эффекта каналирования Критические углы каналирования в кремнии
- 31. Зависимость эффекта каналирования от угла поворота пучка
- 32. Системы координат при моделировании ионной имплантации Первая система координат – это система, привязанная к реальной установке
- 33. Система координат подложки Положение пластины в установке ионной имплантации и связь первой и второй координатных систем
- 34. Стандартное положение подложки Tilt=7º, Rotation= - 90º Наклон подложки - вращение вокруг направления базового среза задается
- 35. Определение углов Tilt и Rotation Угол Tilt может быть определен как угол между осями Z в
- 36. Примеры размещения подложки и сечений
- 38. Скачать презентацию

Познание и моделирование
«Вся эволюция организмов и история человечества связана с информацией
Познание и моделирование
«Вся эволюция организмов и история человечества связана с информацией
Вопросы к экзамену
Цель и задачи курса. Роль приборно-технологического моделирования в проектировании
Вопросы к экзамену
Цель и задачи курса. Роль приборно-технологического моделирования в проектировании

Цель дисциплины
формирование знаний в области математического моделирования технологических процессов микро- и
Цель дисциплины
формирование знаний в области математического моделирования технологических процессов микро- и
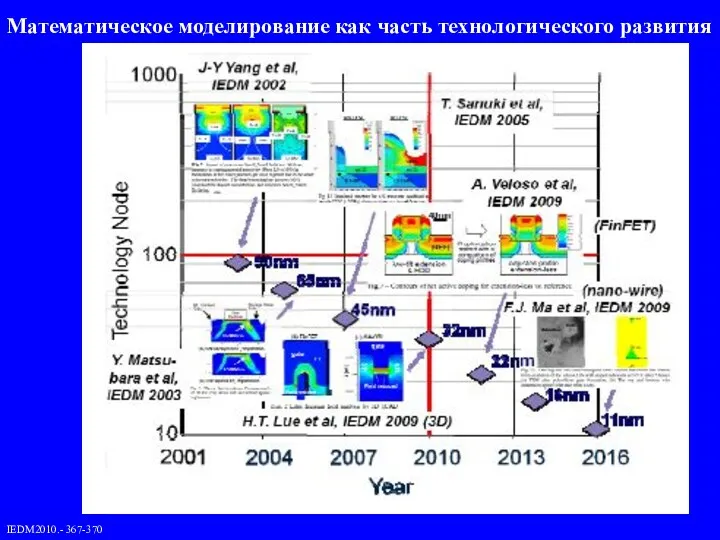
IEDM2010.- 367-370
Математическое моделирование как часть технологического развития
IEDM2010.- 367-370
Математическое моделирование как часть технологического развития
Задачи дисциплины:
изучение основных физических явлений, используемых в процессах формирования элементов интегральных
Задачи дисциплины:
изучение основных физических явлений, используемых в процессах формирования элементов интегральных

Задачи дисциплины (продолжение):
формирование навыков по проведению численного моделирования процессов формирования основных
Задачи дисциплины (продолжение):
формирование навыков по проведению численного моделирования процессов формирования основных
Формируемая профессиональная компетенция/подкомпетенция:
готовность выполнять расчет и проектирование электронных приборов, схем
Формируемая профессиональная компетенция/подкомпетенция:
готовность выполнять расчет и проектирование электронных приборов, схем

Intel's 90nm nMOS
Intel's 90nm nMOS
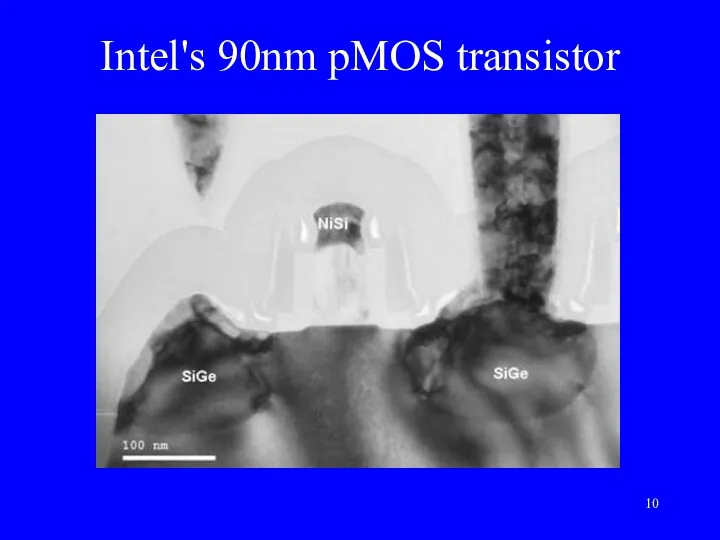
Intel's 90nm pMOS transistor
Intel's 90nm pMOS transistor

25 нм КНИ МОП-транзистор
978-1-4244-7419-6/10/$26.00 ©2010 IEEE
25 нм КНИ МОП-транзистор
978-1-4244-7419-6/10/$26.00 ©2010 IEEE
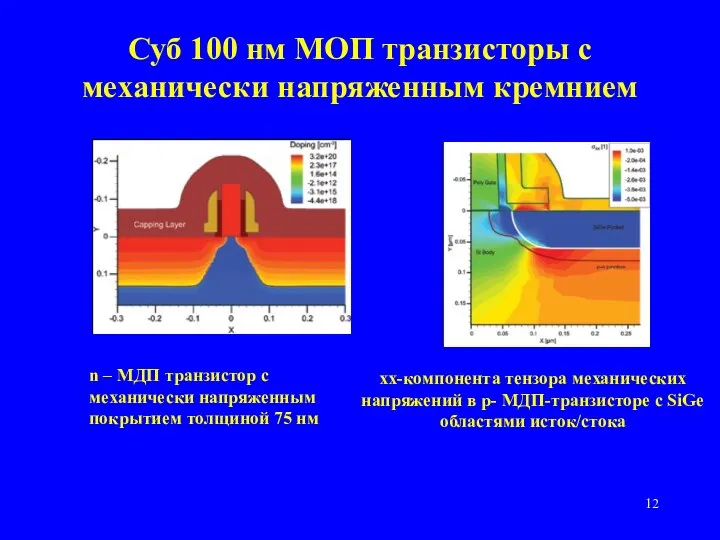
Суб 100 нм МОП транзисторы с механически напряженным кремнием
n – МДП
Суб 100 нм МОП транзисторы с механически напряженным кремнием
n – МДП

Трехмерная модель МДП-транзистора КНИ-типа (32 нм)
IEEE TRANSACTIONS ON ELECTRON DEVICES, VOL.
Трехмерная модель МДП-транзистора КНИ-типа (32 нм)
IEEE TRANSACTIONS ON ELECTRON DEVICES, VOL.

Функция распределения порогового напряжения с учетом разброса фокуса и дозы в
Функция распределения порогового напряжения с учетом разброса фокуса и дозы в

Моделирование базового технологического маршрута КМДП ИС
активные островки
P - карман
осаждение поликремния
осаждение титана
Окончательное
Моделирование базового технологического маршрута КМДП ИС
активные островки
P - карман
осаждение поликремния
осаждение титана
Окончательное

Виртуальный эксперимент: автоматизированное рабочее место Sentaurus Workbench
Варьируются длина канала n-МДП
Виртуальный эксперимент: автоматизированное рабочее место Sentaurus Workbench
Варьируются длина канала n-МДП

Численное моделирование
1-3 часа
Опытное производство
1/3 года
Численное моделирование
1-3 часа
Опытное производство
1/3 года
Литература:
Технология, конструкции и методы моделирования кремниевых интегральных микросхем. М.А. Королев, Т.Ю.
Литература:
Технология, конструкции и методы моделирования кремниевых интегральных микросхем. М.А. Королев, Т.Ю.
Классификация моделей технологических операций
по виду производственной операции
ионная имплантация;
окисление,
силицидизация;
Классификация моделей технологических операций
по виду производственной операции
ионная имплантация;
окисление,
силицидизация;

Примеры различных типов моделей.
Примеры различных типов моделей.

Функциональный состав моделей технологических операций
Функциональный состав моделей технологических операций

Теоретические основы процесса ионной имплантации
В основе теории ионной имплантации лежит
Теоретические основы процесса ионной имплантации
В основе теории ионной имплантации лежит

Механизмы торможения ионов
Торможение является результатом столкновений быстрых заряженных имплантируемых частиц с
Механизмы торможения ионов
Торможение является результатом столкновений быстрых заряженных имплантируемых частиц с

Энергетическая зависимость электронного и ядерного торможения.
При высоких энергиях ионов преобладает
Энергетическая зависимость электронного и ядерного торможения.
При высоких энергиях ионов преобладает
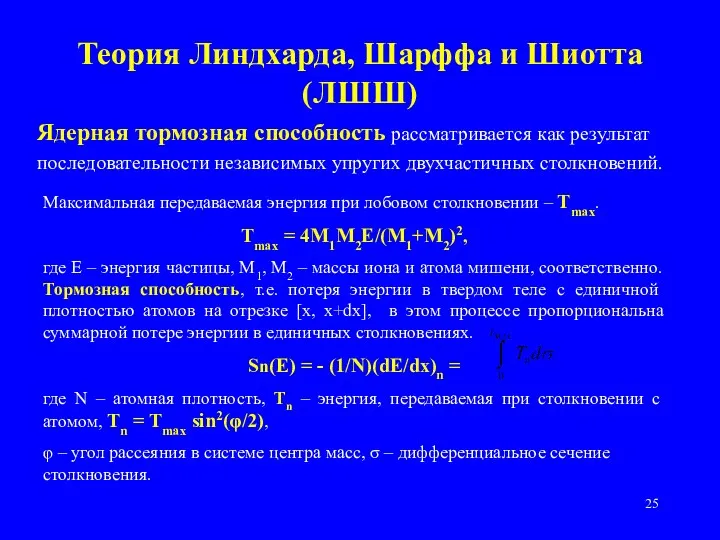
Теория Линдхарда, Шарффа и Шиотта (ЛШШ)
Ядерная тормозная способность рассматривается как результат
Теория Линдхарда, Шарффа и Шиотта (ЛШШ)
Ядерная тормозная способность рассматривается как результат

Электронная тормозная способность в теории ЛШШ вычисляется в приближении свободного электронного
Электронная тормозная способность в теории ЛШШ вычисляется в приближении свободного электронного
Диффузионная модель Бирсака
В теории Бирсака учитывается изменение направления движения иона после
Диффузионная модель Бирсака
В теории Бирсака учитывается изменение направления движения иона после

Теория Бирсака позволяет вычислить длину проективного пробега, не рассчитывая явно функцию
Теория Бирсака позволяет вычислить длину проективного пробега, не рассчитывая явно функцию

Эффект каналирования
Вследствие кристаллической природы полупроводников ионы могут проникнуть в них значительно
Эффект каналирования
Вследствие кристаллической природы полупроводников ионы могут проникнуть в них значительно

Схематическое представление эффекта каналирования
Критические углы каналирования в кремнии
Схематическое представление эффекта каналирования
Критические углы каналирования в кремнии

Зависимость эффекта каналирования от угла поворота пучка
Зависимость эффекта каналирования от угла поворота пучка
Системы координат при моделировании ионной имплантации
Первая система координат – это
Системы координат при моделировании ионной имплантации
Первая система координат – это

Система координат подложки
Положение пластины в установке ионной имплантации и связь
Система координат подложки
Положение пластины в установке ионной имплантации и связь
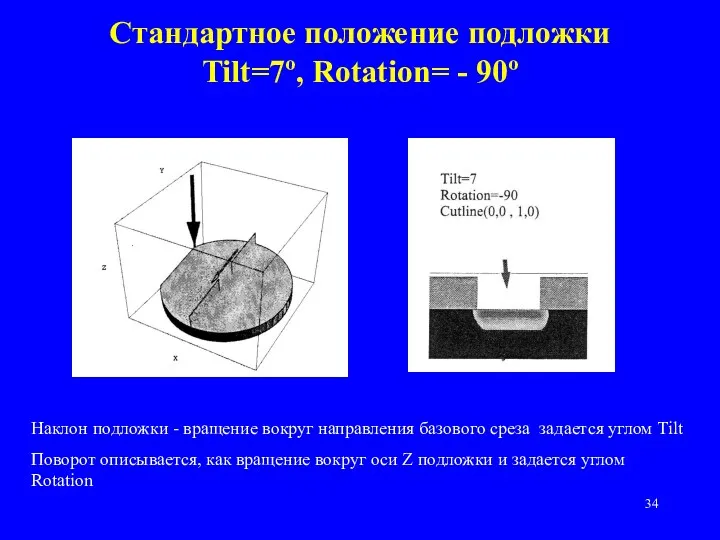
Стандартное положение подложки
Tilt=7º, Rotation= - 90º
Наклон подложки - вращение вокруг
Стандартное положение подложки
Tilt=7º, Rotation= - 90º
Наклон подложки - вращение вокруг

Определение углов Tilt и Rotation
Угол Tilt может быть определен как
Определение углов Tilt и Rotation
Угол Tilt может быть определен как

Примеры размещения подложки и сечений
Примеры размещения подложки и сечений
 Конвергентная журналистика
Конвергентная журналистика Теория Информационных Процессов и Систем. Тема №1: Введение
Теория Информационных Процессов и Систем. Тема №1: Введение Презентация Письменные источники информации
Презентация Письменные источники информации Обновлённый личный кабинет родителя для Школ_removed (1) (1)
Обновлённый личный кабинет родителя для Школ_removed (1) (1) Обзор PL/SQL. Общие сведения
Обзор PL/SQL. Общие сведения Программирование на языке высокого уровня
Программирование на языке высокого уровня Электронные больничные и прямые выплаты ФСС
Электронные больничные и прямые выплаты ФСС Report. Lorem Ipsum
Report. Lorem Ipsum Реляционная алгебра
Реляционная алгебра Алгоритмические языки и программирование
Алгоритмические языки и программирование Power BI
Power BI Алгебра логики и таблицы истинности. Лекция № 4
Алгебра логики и таблицы истинности. Лекция № 4 Entity Relationship Diagrams
Entity Relationship Diagrams Introducing the World Wide Web
Introducing the World Wide Web Интеллектуальная собственность в сети Интернет
Интеллектуальная собственность в сети Интернет Социальные сети
Социальные сети Информационный комитет Студенческого совета СПбГУ
Информационный комитет Студенческого совета СПбГУ Программы-архиваторы. Архивирование файлов
Программы-архиваторы. Архивирование файлов Языки программирования. Лекция №11-12
Языки программирования. Лекция №11-12 Разработка приложений БД
Разработка приложений БД Доклад по теме Метод проектов
Доклад по теме Метод проектов Применение инструментальных средств для разработки 3D-модели архитектурного объекта
Применение инструментальных средств для разработки 3D-модели архитектурного объекта Програмне забезпечення. Операційні системи. Службове програмне забезпечення. Форматування носіїв даних
Програмне забезпечення. Операційні системи. Службове програмне забезпечення. Форматування носіїв даних GPR система автоматизации бизнес-процессов для предприятий, ориентированных на выполнение заказов
GPR система автоматизации бизнес-процессов для предприятий, ориентированных на выполнение заказов Квест это просто игра, или…
Квест это просто игра, или… Тестирование программного обеспечения
Тестирование программного обеспечения Протекающие абстракции, Или зачем современному программисту знать все эти низкоуровневые детали
Протекающие абстракции, Или зачем современному программисту знать все эти низкоуровневые детали Средства модульного программирования
Средства модульного программирования