- Проект “VDrone. Навігація квадрокоптерів в межах певного середовища

Содержание
- 2. Обгрунтування доцільності і перспективи проекту. Назва проекту – “VDrone”. Основною ціллю проекту є допомога власникам квадрокоптерів
- 3. Основні технології Технології, які будуть використовуватися для реалізації продукту: C#, Інструменти для розробки: Xamarin - інструментів
- 4. З чим пов’язяна робота? Дрон (англ. drone — джміль) — Безпілотний літальний апарат (БПЛА) військового чи
- 5. З чим пов’язяна робота? Прилади квадрокоптерів: Hubsan X4 H107L DJI Phantom 2
- 6. З чим пов’язяна робота? Прилади квадрокоптерів: 3D Robotics IRIS DJI Spreading Wings S1000
- 7. СКРАМ
- 8. Процес розробки і планування власних дій
- 9. Характеристика розробника Заяць Орест -, відповідальний за дизайн програмного продукту, розробка Android. Прототипування графічного інтерфейсу. Опрацювання
- 10. Характеристики нашого продукту Додаток є мобільним довідником. В даній клієнтській програмі необхідно реалізувати функціональні можливості, які
- 11. Основні характеристики системи Послідовності дія/відгук Оновлення актуальної інформації За наявності нової інформації оновити поточний файл у
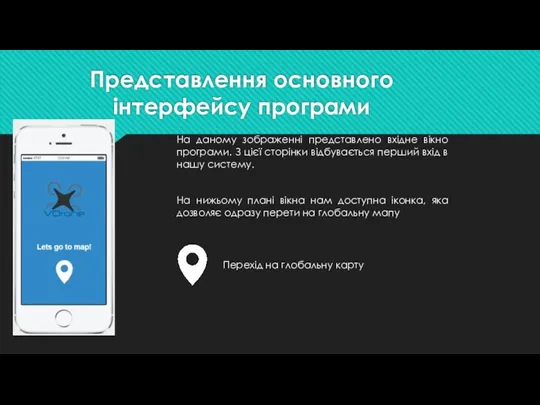
- 12. Представлення основного інтерфейсу програми На даному зображенні представлено вхідне вікно програми. З цієї сторінки відбувається перший
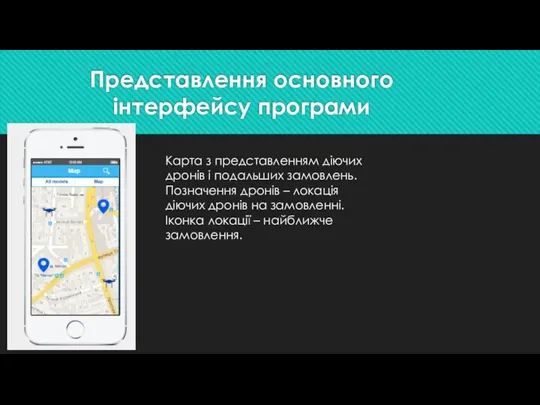
- 13. Представлення основного інтерфейсу програми Карта з представленням діючих дронів і подальших замовлень. Позначення дронів – локація
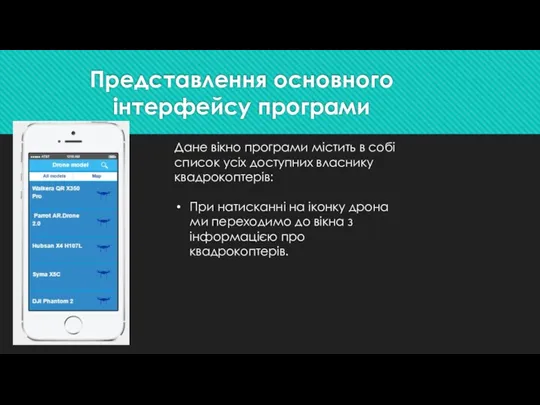
- 14. Представлення основного інтерфейсу програми Дане вікно програми містить в собі список усіх доступних власнику квадрокоптерів: При
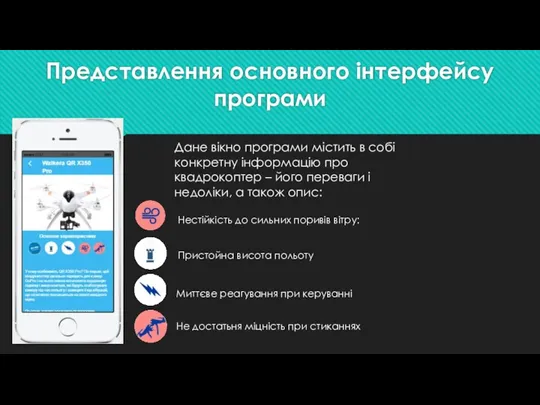
- 15. Представлення основного інтерфейсу програми Дане вікно програми містить в собі конкретну інформацію про квадрокоптер – його
- 16. Підсумки роботи Зробленно і утвердженно інтерфейс. Пророблено прототип Частово реалізовано під платфору Android
- 18. Скачать презентацию
Обгрунтування доцільності і перспективи проекту.
Назва проекту – “VDrone”. Основною ціллю проекту
Обгрунтування доцільності і перспективи проекту.
Назва проекту – “VDrone”. Основною ціллю проекту
Основні технології
Технології, які будуть використовуватися для реалізації продукту: C#,
Інструменти
Основні технології
Технології, які будуть використовуватися для реалізації продукту: C#,
Інструменти

З чим пов’язяна робота?
Дрон (англ. drone — джміль) — Безпілотний літальний апарат (БПЛА) військового чи цивільного призначення, різновид
З чим пов’язяна робота?
Дрон (англ. drone — джміль) — Безпілотний літальний апарат (БПЛА) військового чи цивільного призначення, різновид
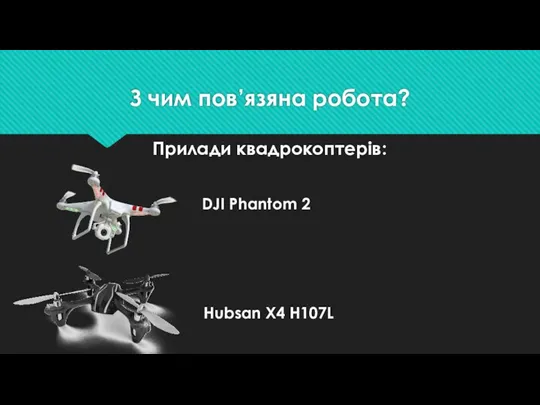
З чим пов’язяна робота?
Прилади квадрокоптерів:
Hubsan X4 H107L
DJI Phantom 2
З чим пов’язяна робота?
Прилади квадрокоптерів:
Hubsan X4 H107L
DJI Phantom 2

З чим пов’язяна робота?
Прилади квадрокоптерів:
3D Robotics IRIS
DJI Spreading Wings S1000
З чим пов’язяна робота?
Прилади квадрокоптерів:
3D Robotics IRIS
DJI Spreading Wings S1000
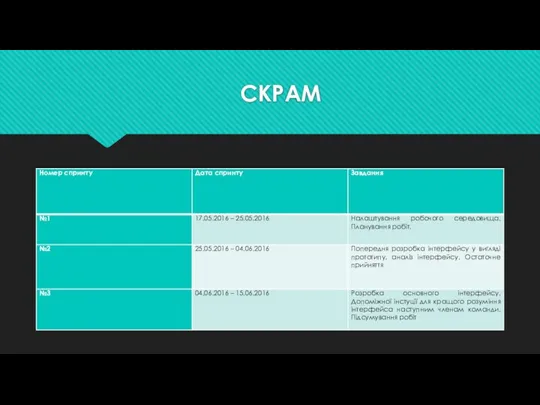
СКРАМ
СКРАМ
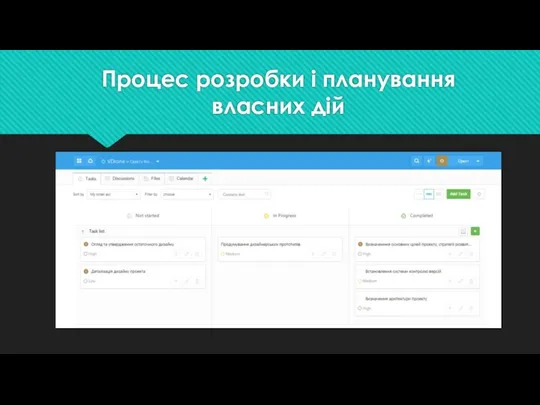
Процес розробки і планування власних дій
Процес розробки і планування власних дій
Характеристика розробника
Заяць Орест -, відповідальний за дизайн програмного продукту, розробка Android.
Характеристика розробника
Заяць Орест -, відповідальний за дизайн програмного продукту, розробка Android.
Характеристики нашого продукту
Додаток є мобільним довідником.
В даній клієнтській програмі необхідно
Характеристики нашого продукту
Додаток є мобільним довідником.
В даній клієнтській програмі необхідно
Основні характеристики системи
Послідовності дія/відгук
Оновлення актуальної інформації
За наявності нової інформації оновити поточний
Основні характеристики системи
Послідовності дія/відгук
Оновлення актуальної інформації
За наявності нової інформації оновити поточний
Представлення основного інтерфейсу програми
На даному зображенні представлено вхідне вікно програми. З
Представлення основного інтерфейсу програми
На даному зображенні представлено вхідне вікно програми. З
Представлення основного інтерфейсу програми
Карта з представленням діючих дронів і подальших замовлень.
Представлення основного інтерфейсу програми
Карта з представленням діючих дронів і подальших замовлень.
Представлення основного інтерфейсу програми
Дане вікно програми містить в собі список усіх
Представлення основного інтерфейсу програми
Дане вікно програми містить в собі список усіх
Представлення основного інтерфейсу програми
Дане вікно програми містить в собі конкретну інформацію
Представлення основного інтерфейсу програми
Дане вікно програми містить в собі конкретну інформацію
Підсумки роботи
Зробленно і утвердженно інтерфейс.
Пророблено прототип
Частово реалізовано під платфору Android
Підсумки роботи
Зробленно і утвердженно інтерфейс.
Пророблено прототип
Частово реалізовано під платфору Android
 Разработка и стандартизация программных средств и информационных технологий
Разработка и стандартизация программных средств и информационных технологий Деректердің иерархиялық моделі
Деректердің иерархиялық моделі Презентация к уроку Съёмные носители информации
Презентация к уроку Съёмные носители информации Использование геоинформационных систем при обновлении крупномасштабных топографических карт
Использование геоинформационных систем при обновлении крупномасштабных топографических карт Защита информации
Защита информации Контур. ERP Фокус для SAP - RU 3
Контур. ERP Фокус для SAP - RU 3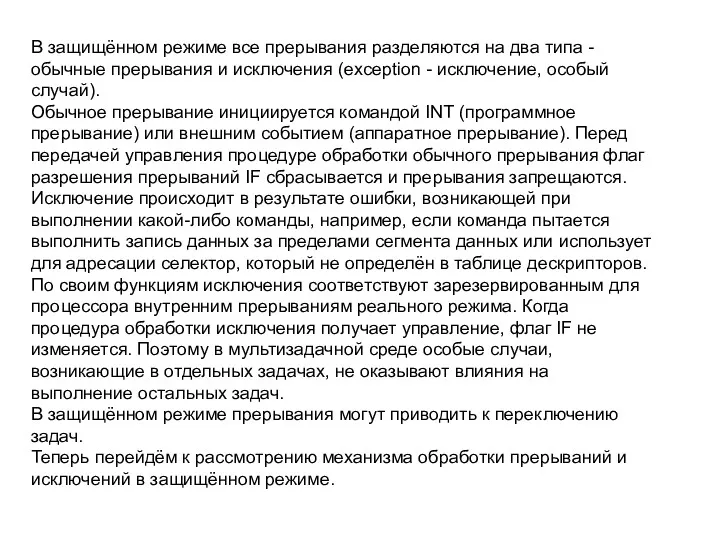 Прерывания в защищённом режиме
Прерывания в защищённом режиме Логические элементы компьютера
Логические элементы компьютера Веб-сайт туристского предприятия как инструмент продвижения гостиничных услуг
Веб-сайт туристского предприятия как инструмент продвижения гостиничных услуг Система делает возможным приобрести билеты на многие мероприятия на сайте
Система делает возможным приобрести билеты на многие мероприятия на сайте Создание, изменение и удаление таблиц
Создание, изменение и удаление таблиц Страничный механизм трансляции. (Тема 14)
Страничный механизм трансляции. (Тема 14) Обобщенные методы и классы. Лекция 35
Обобщенные методы и классы. Лекция 35 Графика. Графический режим
Графика. Графический режим Проектування мобільних застосунків. Ресурси (Лекція №5)
Проектування мобільних застосунків. Ресурси (Лекція №5) Створення комп'ютерних презентацій (10 клас)
Створення комп'ютерних презентацій (10 клас) Использование технологий ТРИЗ для повышения мотивации обучения при изучении отдельных разделов информатики
Использование технологий ТРИЗ для повышения мотивации обучения при изучении отдельных разделов информатики Тема: Интернет. Всемирная паутина.
Тема: Интернет. Всемирная паутина. Комп’ютерні віруси
Комп’ютерні віруси Веб-сайт Интернет-магазин оружия
Веб-сайт Интернет-магазин оружия Компьютерная графика. Обработка графической информации
Компьютерная графика. Обработка графической информации Верификация приложений
Верификация приложений Робик. Команды для Робика (3 кл.)
Робик. Команды для Робика (3 кл.) Обработка информации
Обработка информации Компьютерная графика. Векторная и растровая графика
Компьютерная графика. Векторная и растровая графика Новости (НЕ)больших городов. Что такое журналистика?
Новости (НЕ)больших городов. Что такое журналистика? История Windows OC
История Windows OC Презентация по информатике
Презентация по информатике