- Процессы и потоки. Тема 2

Содержание
- 2. Ресурсы системы Управляющие таблицы ОС Образ процесса Процесс 1 Процесс N Память Устройства Файлы Процессы Процесс
- 3. Управление процессами Процесс (process) - это программа при ее исполнении. Для процесса требуется ряд ресурсов, включая
- 4. Понятие процесса ОС исполняет множество классов программ: Пакетная система (batch system) – задания (jobs) Система с
- 5. Задание (JOB) Объекты Процесс 2 Процесс N Процесс 1 Поток 2 Thread 2 Поток k Thread
- 6. Однопоточные и многопоточные процессы
- 7. Образ процесса: программа, данные, стек и атрибуты процесса
- 8. Дескриптор процесса содержит: 1. Информацию по идентификации процесса (идентификатор процесса, идентификатор пользователя, идентификаторы родительского и дочерних
- 11. Информация по состоянию и управлению процессом Состояние процесса, определяющее его готовность к выполнению (выполняющийся, готовый к
- 12. КОНТЕКСТ ПРОЦЕССА Содержимое регистров процессора, доступных пользователю (обычно 8 – 32 регистра и до 100 регистров
- 13. Переключение контекста процесса (context switch) Когда процессор переключается на другой процесс, система должна сохранить состояние старого
- 14. Простейшая модель процесса Диспетчеризация Пауза Не выполняется Выполняется Вход Выход CPU Вход Выход Очередь Пауза Диспетчеризация
- 15. Потоки и их модели Описатель потока: блок управления потоком и контекст потока (в многопоточной системе процессы
- 16. Типичный граф состояния потока ВЫПОЛНЕНИЕ ГОТОВНОСТЬ ОЖИДАНИЕ Поток завершен или ошибка Поток ожидает завершения ввода-вывода или
- 17. В мультипрограммной системе поток может находиться в одном из трех основных состояний: выполнение − активное состояние
- 18. Переход от выполнения одного потока к другому осуществляется в результате планирования и диспетчеризации. Планирование потоков включает
- 19. Алгоритмы планирования потоков Невытесняющие (non-preemptive) планирование распределяется между ОС и прикладными программами; необходимость частых передач управлений
- 20. В большинстве операционных систем универсального назначения планирование осуществляется динамически (on-line), то есть решения принимаются во время
- 21. Критерии диспетчеризации Использование процессора – поддержание его в режиме занятости, насколько это возможно Пропускная способность (throughput)
- 22. Алгоритмы планирования, основанные на квантовании Каждому потоку поочередно для выполнения предоставляется ограниченный непрерывный период процессорного времени
- 23. Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает, когда ему будет предоставлен новый
- 24. Стратегия Round Robin (RR) – “круговая система” Каждый процесс получает небольшой квант процессорного времени, обычно –
- 25. Алгоритмы планирования, основанные на приоритетах Приоритет − это число, характеризующее степень привилегированности потока при использовании ресурсов
- 26. Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока. В этом случае приоритеты называются
- 27. 31 30 16 -1 0 15 Системные приоритеты Пользоват. приоритеты 7 8 6 Наивысший Повышенный Обычный
- 28. Изменение базового приоритета потока Увеличение приоритета + 1 – завершение ввода-вывода по диску; + 2 –
- 29. Механизм прерываний Прерывание принудительная передача управления от выполняемой программы к системе, происходящая при возникновении определенного
- 30. Схема обработки прерываний
- 31. Обозначения; ! Прерывание (сигнал – установление факта прерывания) 1 Идентификация прерывания 2 Отключение
- 32. Назначение и типы прерываний В зависимости от источника прерывания делятся на три больших класса: внешние; внутренние;
- 33. Внутренние прерывания, называемые также исключениями (exeption), происходят синхронно выполнению программы при появлении аварийной ситуации в ходе
- 34. Программные прерывания отличаются от предыдущих двух классов тем, что они по своей сути не являются «истинными»
- 35. Прерываниям приписывается приоритет, с помощью которого они ранжируются по степени важности и срочности. О прерываниях, имеющих
- 36. Процедуры, вызываемые по прерываниям, обычно называют обработчиками прерываний, или процедурами обслуживания прерываний (Interrupt Servie Routine, ISR).
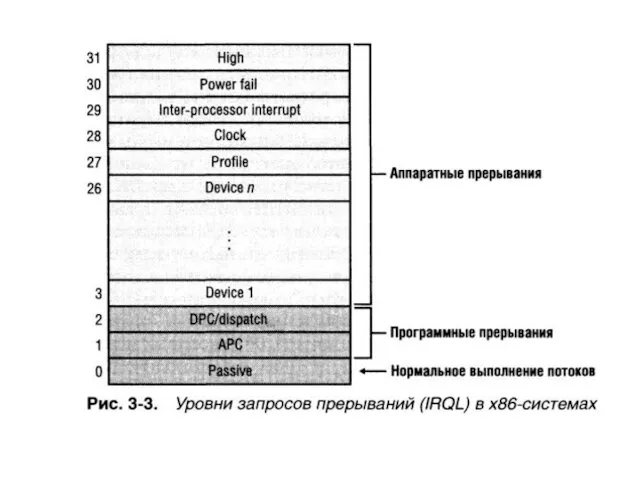
- 37. Распределение прерываний по уровням приоритета Средства контроля процессора Системный таймер Магнитные диски Сетевое оборудование Терминалы Программные
- 38. Два основных способа, с помощью которых шины выполняют прерывания: векторный (vectored) и опрашиваемый (polled). В обоих
- 39. Вектор прерываний, передаваемый в процессор, представляет собой целое число в диапазоне от 0 до 255, указывающее
- 40. При использовании опрашиваемых прерываний процессор получает от устройства только информацию об уровне приоритета прерывания. С каждым
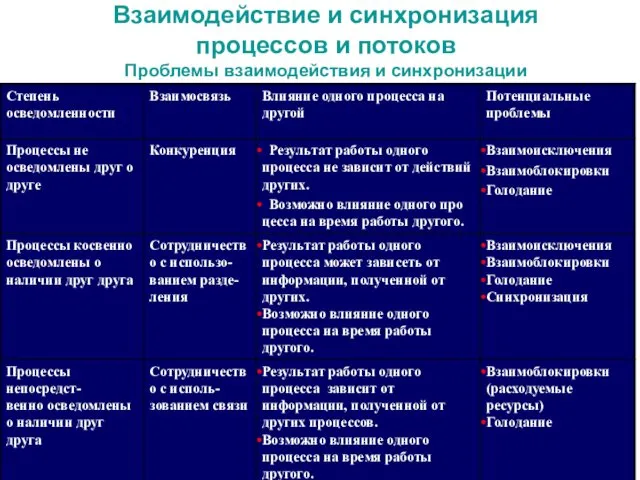
- 43. Взаимодействие и синхронизация процессов и потоков Проблемы взаимодействия и синхронизации
- 44. Конкуренция процессов в борьбе за ресурсы Конкуренция – ситуация, когда два или более процессов требуют доступ
- 45. Взаимоблокировки (тупики, deadlock) Группа процессов находится в тупиковой ситуации, если каждый процесс из группы ожидает события,
- 46. Проблема “голодание” R R R R P1 P2 P3 P1 P2 P3 P1 P2 P3 P1
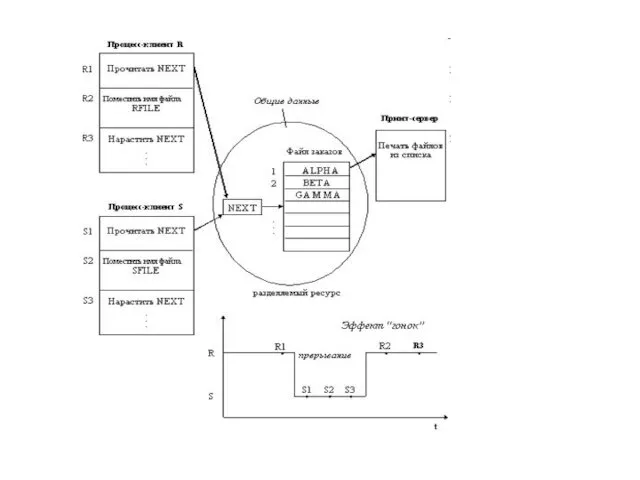
- 47. Сотрудничество с использованием разделения Процессы, взаимодействующие с другими процессами без наличия явной информации о друг друге,
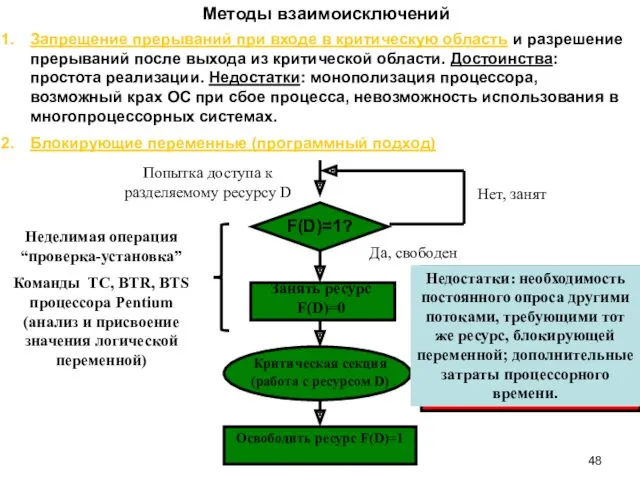
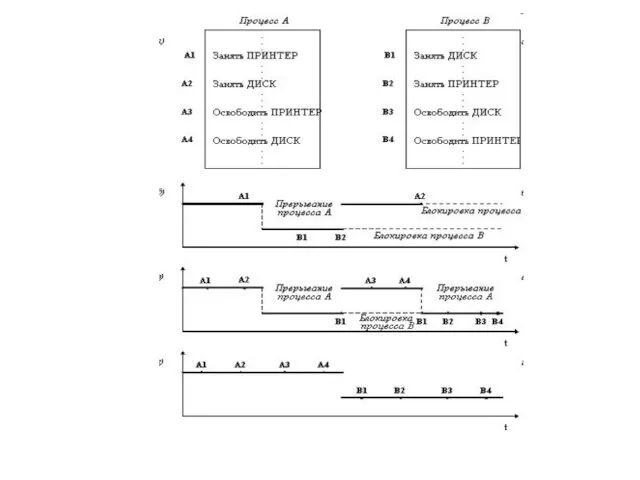
- 48. Методы взаимоисключений Запрещение прерываний при входе в критическую область и разрешение прерываний после выхода из критической
- 49. Использование системных функций входа в критическую секцию Системный вызов EnterCriticalSection() Попытка доступа к разделяемому ресурсу D
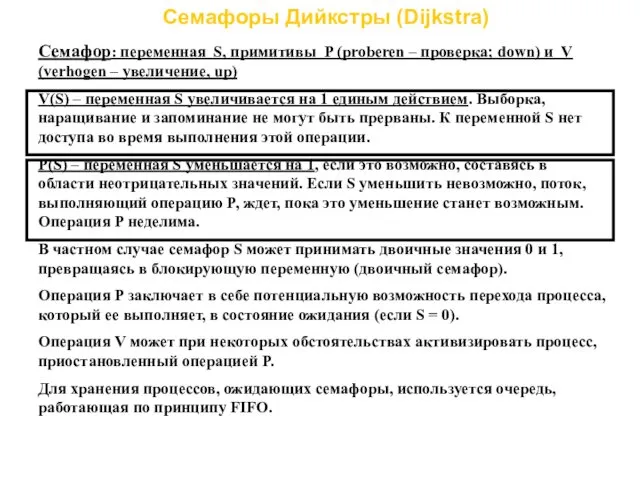
- 50. Семафоры Дийкстры (Dijkstra) Семафор: переменная S, примитивы P (proberen – проверка; down) и V (verhogen –
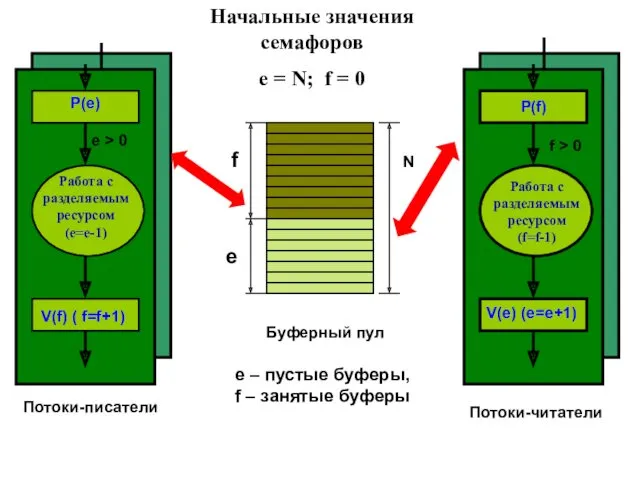
- 52. f e N Начальные значения семафоров e = N; f = 0 P(e) Работа с разделяемым
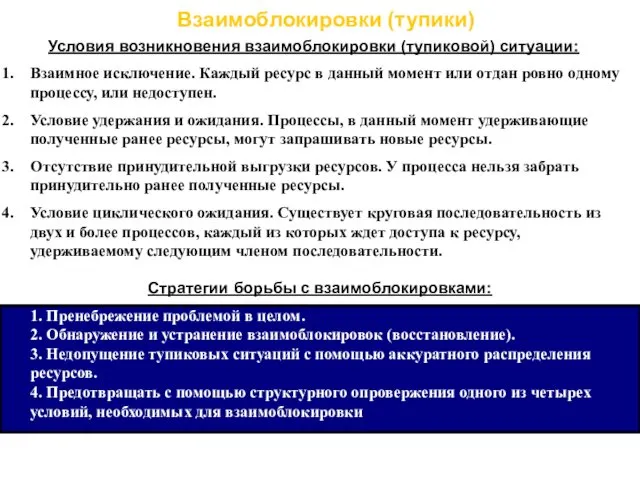
- 53. Взаимоблокировки (тупики) Условия возникновения взаимоблокировки (тупиковой) ситуации: Взаимное исключение. Каждый ресурс в данный момент или отдан
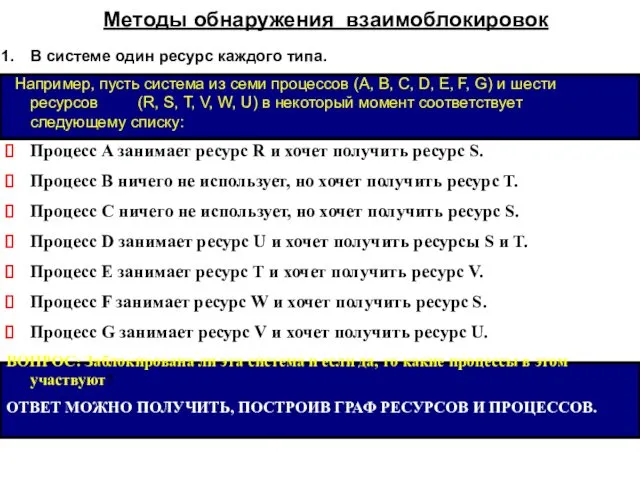
- 54. Методы обнаружения взаимоблокировок В системе один ресурс каждого типа. Например, пусть система из семи процессов (A,
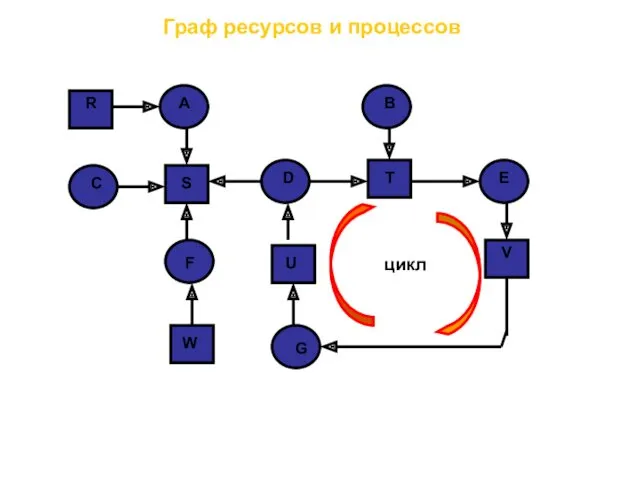
- 55. цикл R A C S F D B T E U W G V Граф ресурсов
- 56. 2. В системе несколько ресурсов каждого типа. P = {P1, P2, . . . , Pn}
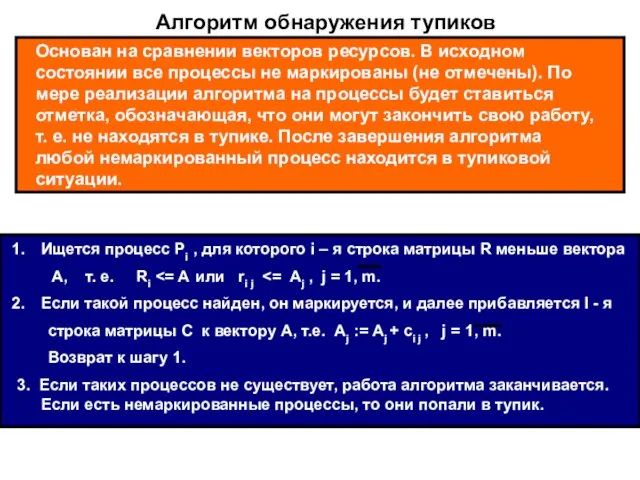
- 57. Алгоритм обнаружения тупиков Основан на сравнении векторов ресурсов. В исходном состоянии все процессы не маркированы (не
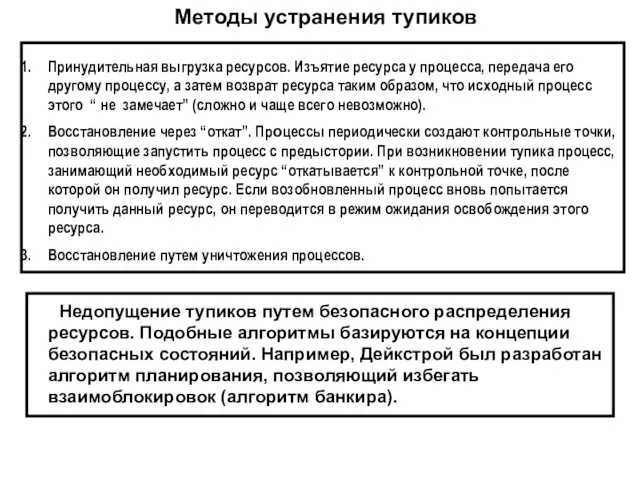
- 58. Методы устранения тупиков Принудительная выгрузка ресурсов. Изъятие ресурса у процесса, передача его другому процессу, а затем
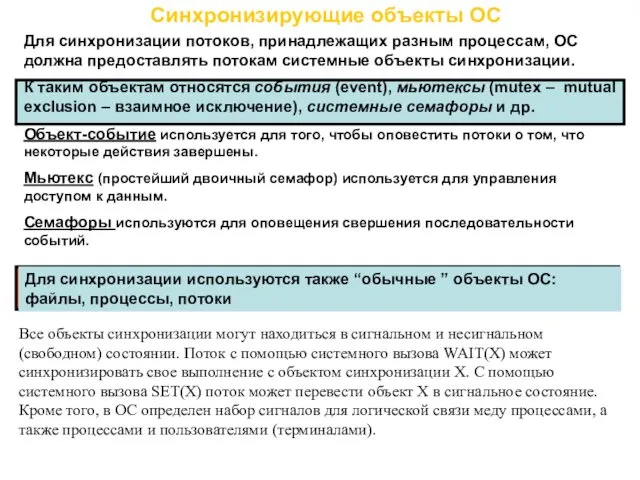
- 59. Синхронизирующие объекты ОС Для синхронизации потоков, принадлежащих разным процессам, ОС должна предоставлять потокам системные объекты синхронизации.
- 62. Проблема обедающих философов. Полезна для моделирования процессов, соревнующихся за монопольный доступ к ограниченному количеству ресурсов, например
- 63. Решение задачи обедающих философов #define N 5 /* Количество философов */ #define LEFT (i+N-1)%N /* Номер
- 64. void take_forks(int i) /* i - номер философа, от 0 до N-1*/ { down(&mutex); /* Вход
- 65. Траектории ресурсов Диск Диск
- 66. Алгоритм банкира
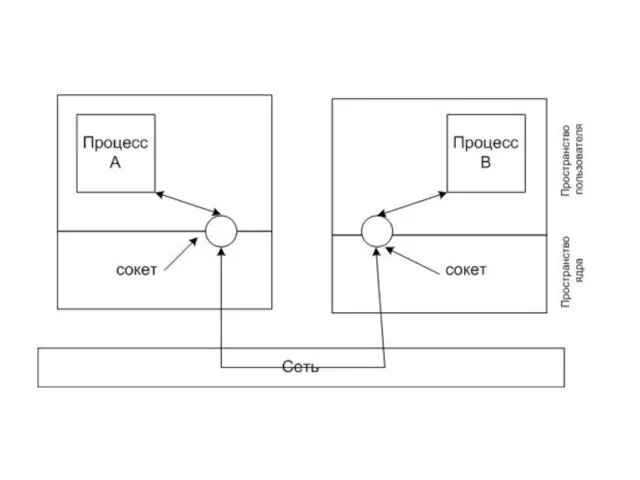
- 67. Межпроцессное взаимодействие (англ. Inter-Process Communication, IPC) — набор способов обмена данными между множеством потоков в одном
- 68. Виды механизмов межпроцессного взаимодействия (InterProcess Communication - IPC)
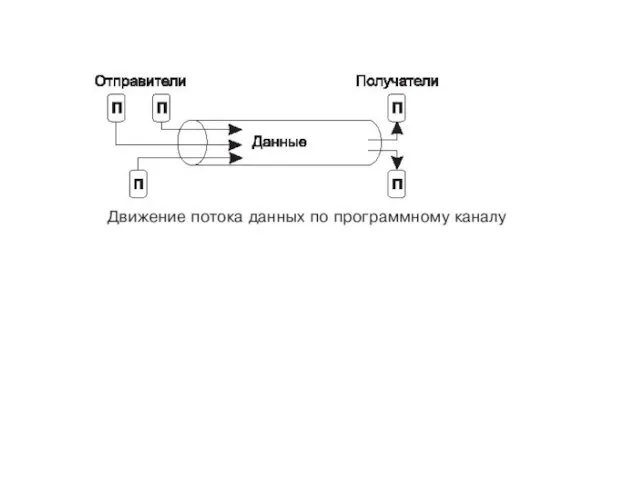
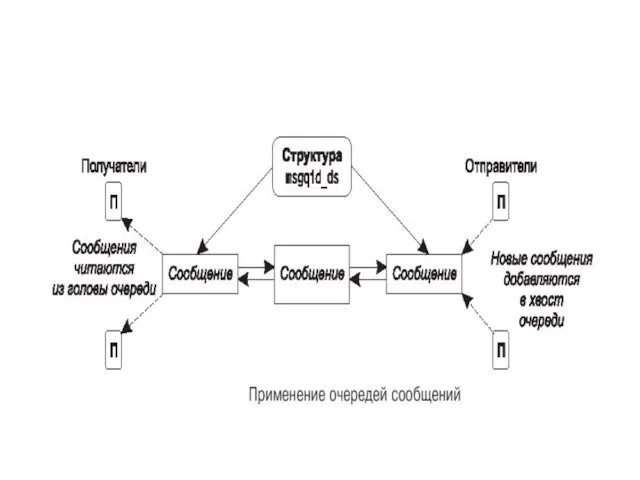
- 70. Межпроцессный обмен на локальном компьютере Запись
- 72. Организации очереди в массиве Указатель на конец Указатель на начало
- 75. Отображаемые файлы
- 79. Скачать презентацию
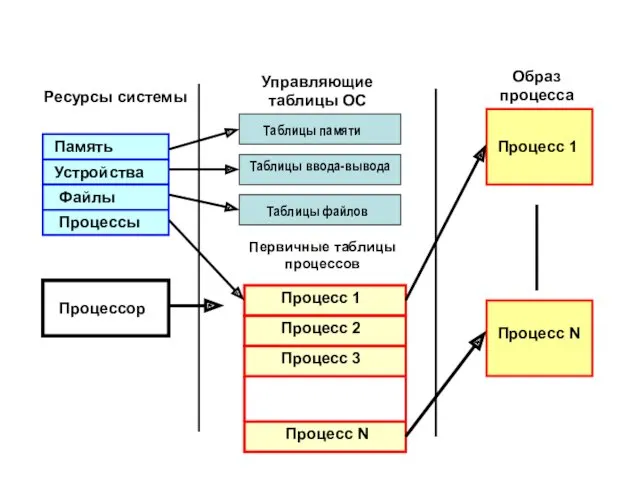
Ресурсы системы
Управляющие таблицы ОС
Образ процесса
Процесс 1
Процесс N
Память
Устройства
Файлы
Процессы
Процесс 1
Процесс 3
Процесс 2
Процесс N
Процессор
Первичные
Ресурсы системы
Управляющие таблицы ОС
Образ процесса
Процесс 1
Процесс N
Память
Устройства
Файлы
Процессы
Процесс 1
Процесс 3
Процесс 2
Процесс N
Процессор
Первичные
Управление процессами
Процесс (process) - это программа при ее исполнении. Для процесса
Управление процессами
Процесс (process) - это программа при ее исполнении. Для процесса
Понятие процесса
ОС исполняет множество классов программ:
Пакетная система (batch system) – задания
Понятие процесса
ОС исполняет множество классов программ:
Пакетная система (batch system) – задания
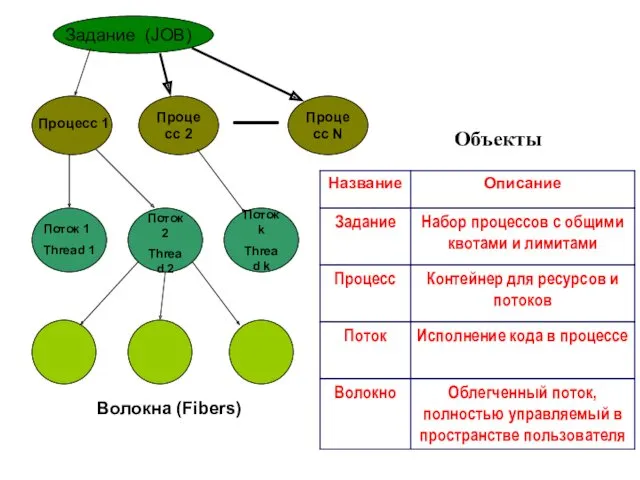
Задание (JOB)
Объекты
Процесс 2
Процесс N
Процесс 1
Поток 2
Thread 2
Поток k
Thread k
Поток 1
Thread 1
Волокна
Задание (JOB)
Объекты
Процесс 2
Процесс N
Процесс 1
Поток 2
Thread 2
Поток k
Thread k
Поток 1
Thread 1
Волокна
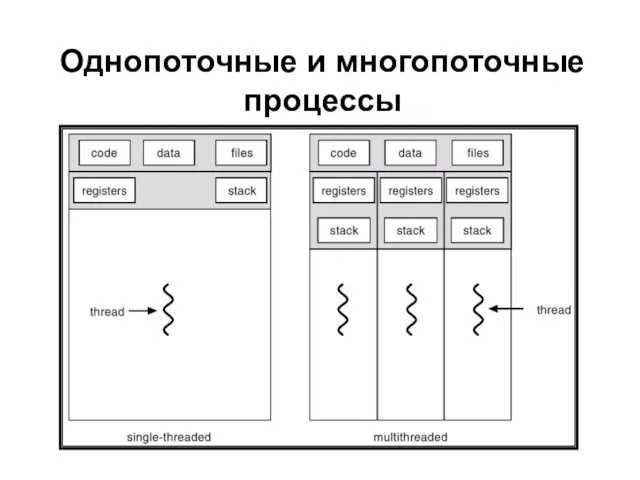
Однопоточные и многопоточные процессы
Однопоточные и многопоточные процессы
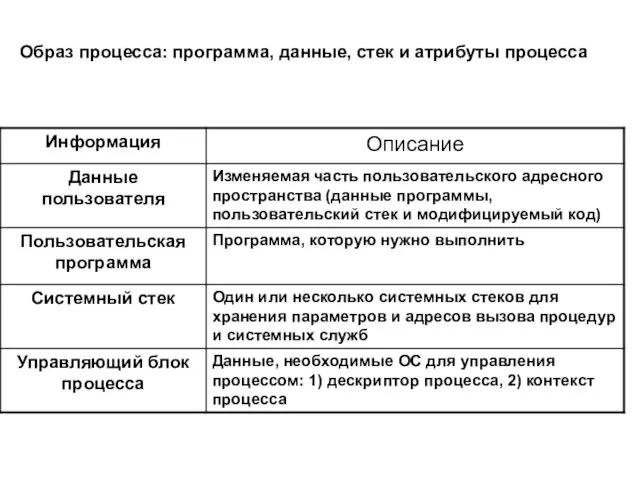
Образ процесса: программа, данные, стек и атрибуты процесса
Образ процесса: программа, данные, стек и атрибуты процесса
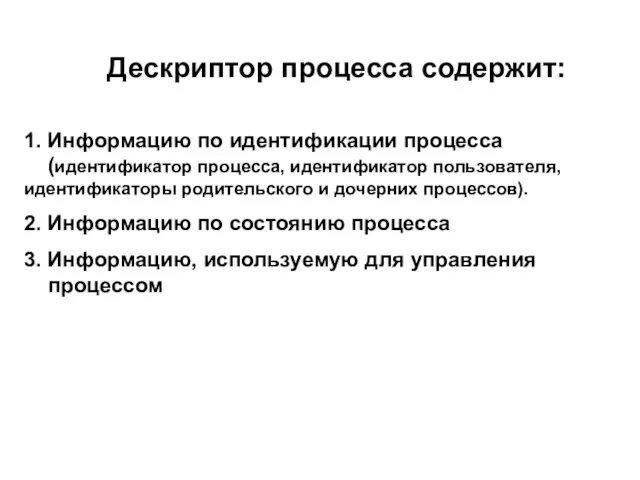
Дескриптор процесса содержит:
1. Информацию по идентификации процесса (идентификатор процесса, идентификатор пользователя,
идентификаторы
Дескриптор процесса содержит:
1. Информацию по идентификации процесса (идентификатор процесса, идентификатор пользователя,
идентификаторы
Информация по состоянию и управлению процессом
Состояние процесса, определяющее его готовность
Информация по состоянию и управлению процессом
Состояние процесса, определяющее его готовность
КОНТЕКСТ ПРОЦЕССА
Содержимое регистров процессора, доступных пользователю (обычно 8 – 32
КОНТЕКСТ ПРОЦЕССА
Содержимое регистров процессора, доступных пользователю (обычно 8 – 32
Переключение контекста процесса (context switch)
Когда процессор переключается на другой процесс, система
Переключение контекста процесса (context switch)
Когда процессор переключается на другой процесс, система
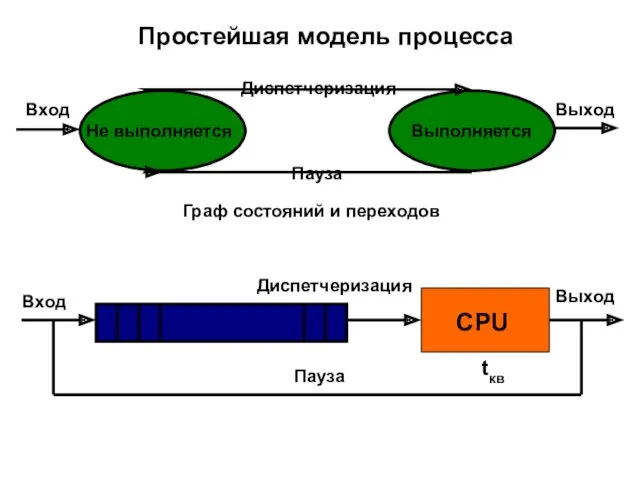
Простейшая модель процесса
Диспетчеризация
Пауза
Не выполняется
Выполняется
Вход
Выход
CPU
Вход
Выход
Очередь
Пауза
Диспетчеризация
CPU
Граф состояний и переходов
tкв
Простейшая модель процесса
Диспетчеризация
Пауза
Не выполняется
Выполняется
Вход
Выход
CPU
Вход
Выход
Очередь
Пауза
Диспетчеризация
CPU
Граф состояний и переходов
tкв
Потоки и их модели
Описатель потока: блок управления потоком и контекст потока
Потоки и их модели
Описатель потока: блок управления потоком и контекст потока
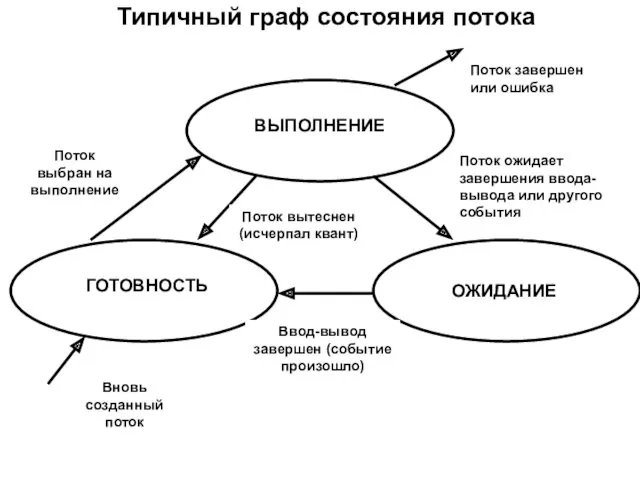
Типичный граф состояния потока
ВЫПОЛНЕНИЕ
ГОТОВНОСТЬ
ОЖИДАНИЕ
Поток завершен или ошибка
Поток ожидает завершения ввода-вывода или
Типичный граф состояния потока
ВЫПОЛНЕНИЕ
ГОТОВНОСТЬ
ОЖИДАНИЕ
Поток завершен или ошибка
Поток ожидает завершения ввода-вывода или
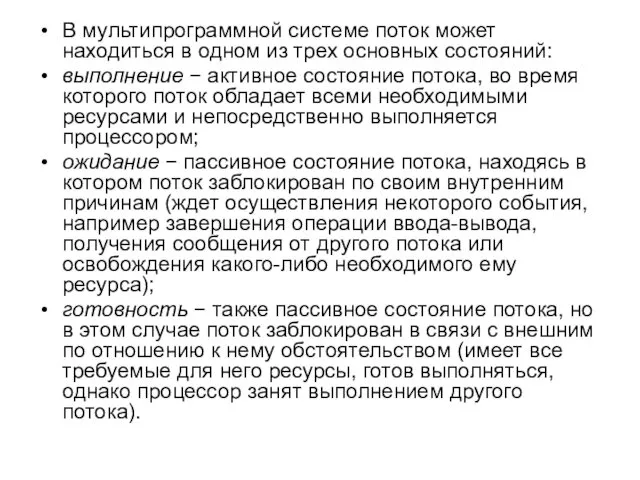
В мультипрограммной системе поток может находиться в одном из трех основных
В мультипрограммной системе поток может находиться в одном из трех основных
Переход от выполнения одного потока к другому осуществляется в результате планирования
Переход от выполнения одного потока к другому осуществляется в результате планирования
Алгоритмы планирования потоков
Невытесняющие (non-preemptive)
планирование распределяется между ОС и прикладными программами;
Алгоритмы планирования потоков
Невытесняющие (non-preemptive)
планирование распределяется между ОС и прикладными программами;
В большинстве операционных систем универсального назначения планирование осуществляется динамически (on-line), то
В большинстве операционных систем универсального назначения планирование осуществляется динамически (on-line), то
Критерии диспетчеризации
Использование процессора – поддержание его в режиме занятости, насколько это
Критерии диспетчеризации
Использование процессора – поддержание его в режиме занятости, насколько это
Алгоритмы планирования, основанные на квантовании
Каждому потоку поочередно для выполнения предоставляется ограниченный
Алгоритмы планирования, основанные на квантовании
Каждому потоку поочередно для выполнения предоставляется ограниченный
Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает,
Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает,
Стратегия Round Robin (RR) – “круговая система”
Каждый процесс получает небольшой квант
Стратегия Round Robin (RR) – “круговая система”
Каждый процесс получает небольшой квант
Алгоритмы планирования, основанные на приоритетах
Приоритет − это число, характеризующее степень
Алгоритмы планирования, основанные на приоритетах
Приоритет − это число, характеризующее степень
Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока.
Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока.
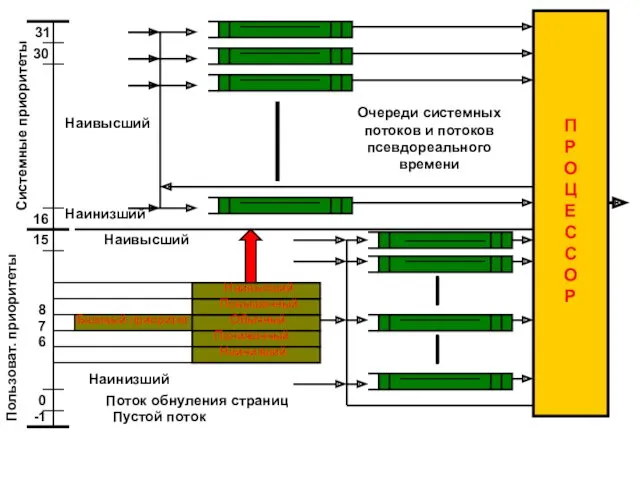
31
30
16
-1
0
15
Системные приоритеты
Пользоват. приоритеты
7
8
6
Наивысший
Повышенный
Обычный
Пониженный
Наинизший
Поток обнуления страниц
Пустой поток
Базовый приоритет
Наивысший
Наинизший
Очереди системных потоков и потоков
31
30
16
-1
0
15
Системные приоритеты
Пользоват. приоритеты
7
8
6
Наивысший
Повышенный
Обычный
Пониженный
Наинизший
Поток обнуления страниц
Пустой поток
Базовый приоритет
Наивысший
Наинизший
Очереди системных потоков и потоков
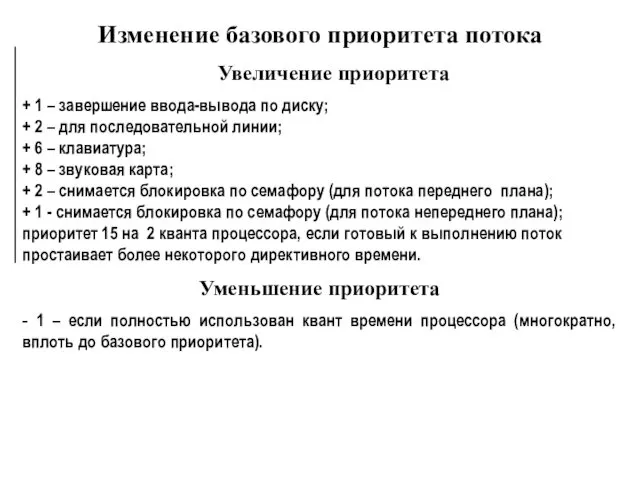
Изменение базового приоритета потока
Увеличение приоритета
+ 1 – завершение ввода-вывода
Изменение базового приоритета потока
Увеличение приоритета
+ 1 – завершение ввода-вывода
Механизм прерываний
Прерывание принудительная передача управления от выполняемой программы к системе,
Механизм прерываний
Прерывание принудительная передача управления от выполняемой программы к системе,
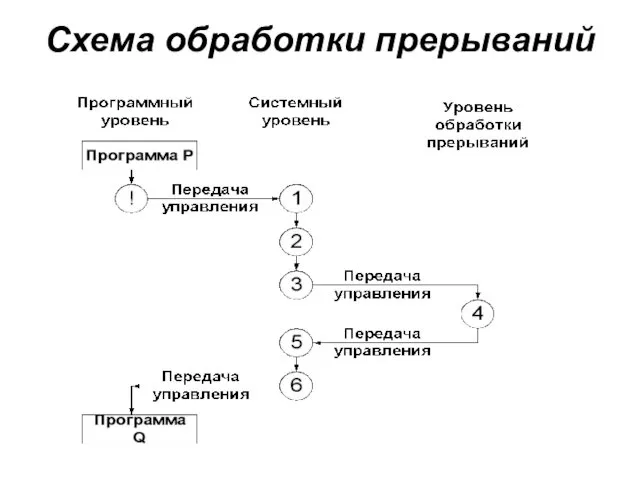
Схема обработки прерываний
Схема обработки прерываний
Обозначения;
! Прерывание (сигнал – установление факта прерывания)
1 Идентификация прерывания
Обозначения;
! Прерывание (сигнал – установление факта прерывания)
1 Идентификация прерывания
Назначение и типы прерываний
В зависимости от источника прерывания делятся на три
Назначение и типы прерываний
В зависимости от источника прерывания делятся на три
Внутренние прерывания, называемые также исключениями (exeption), происходят синхронно выполнению программы при
Внутренние прерывания, называемые также исключениями (exeption), происходят синхронно выполнению программы при
Программные прерывания отличаются от предыдущих двух классов тем, что они по
Программные прерывания отличаются от предыдущих двух классов тем, что они по
Прерываниям приписывается приоритет, с помощью которого они ранжируются по степени важности
Прерываниям приписывается приоритет, с помощью которого они ранжируются по степени важности
Процедуры, вызываемые по прерываниям, обычно называют обработчиками прерываний, или процедурами обслуживания
Процедуры, вызываемые по прерываниям, обычно называют обработчиками прерываний, или процедурами обслуживания
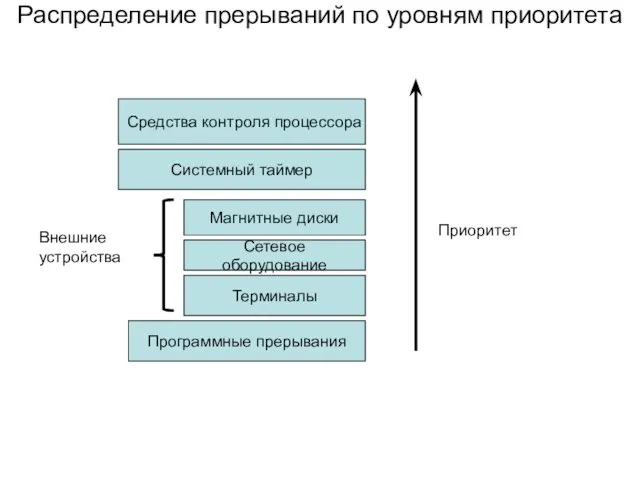
Распределение прерываний по уровням приоритета
Средства контроля процессора
Системный таймер
Магнитные диски
Сетевое оборудование
Терминалы
Программные прерывания
Внешние
Распределение прерываний по уровням приоритета
Средства контроля процессора
Системный таймер
Магнитные диски
Сетевое оборудование
Терминалы
Программные прерывания
Внешние
Два основных способа, с помощью которых шины выполняют прерывания: векторный (vectored)
Два основных способа, с помощью которых шины выполняют прерывания: векторный (vectored)
Вектор прерываний, передаваемый в процессор, представляет собой целое число в диапазоне
Вектор прерываний, передаваемый в процессор, представляет собой целое число в диапазоне
При использовании опрашиваемых прерываний процессор получает от устройства только информацию об
При использовании опрашиваемых прерываний процессор получает от устройства только информацию об

Взаимодействие и синхронизация процессов и потоков
Проблемы взаимодействия и синхронизации
Взаимодействие и синхронизация процессов и потоков
Проблемы взаимодействия и синхронизации
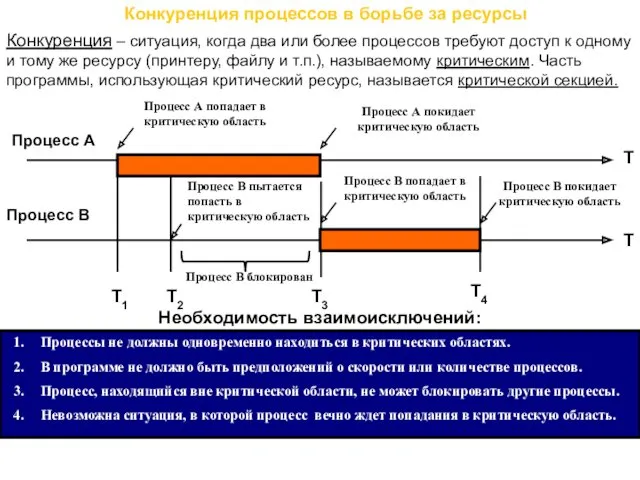
Конкуренция процессов в борьбе за ресурсы
Конкуренция – ситуация, когда два или
Конкуренция процессов в борьбе за ресурсы
Конкуренция – ситуация, когда два или
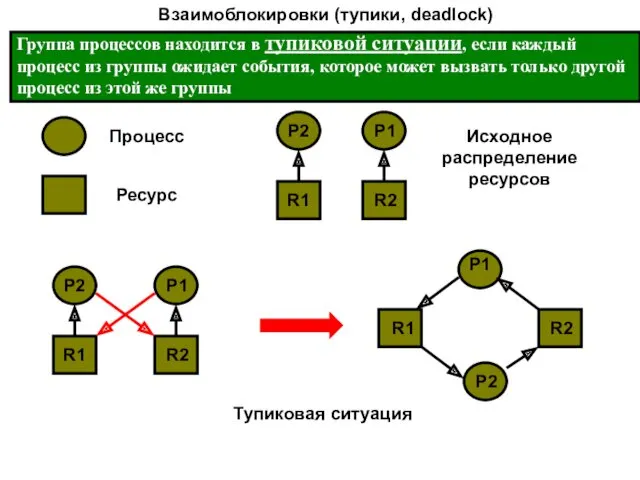
Взаимоблокировки (тупики, deadlock)
Группа процессов находится в тупиковой ситуации, если каждый
Взаимоблокировки (тупики, deadlock)
Группа процессов находится в тупиковой ситуации, если каждый
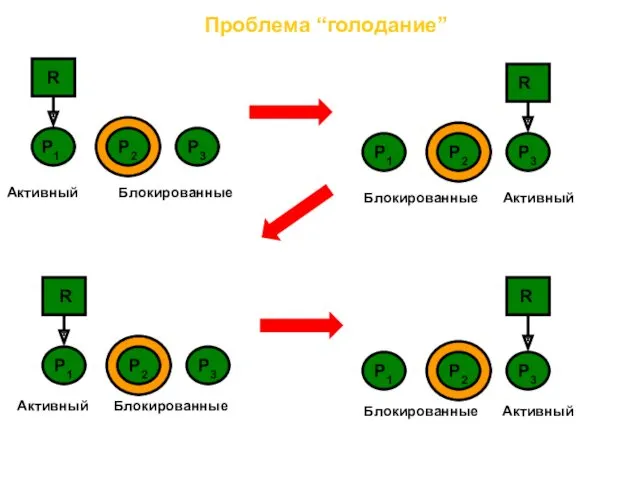
Проблема “голодание”
R
R
R
R
P1
P2
P3
P1
P2
P3
P1
P2
P3
P1
P2
P3
Активный
Блокированные
Блокированные
Активный
Активный
Блокированные
Блокированные
Активный
Проблема “голодание”
R
R
R
R
P1
P2
P3
P1
P2
P3
P1
P2
P3
P1
P2
P3
Активный
Блокированные
Блокированные
Активный
Активный
Блокированные
Блокированные
Активный
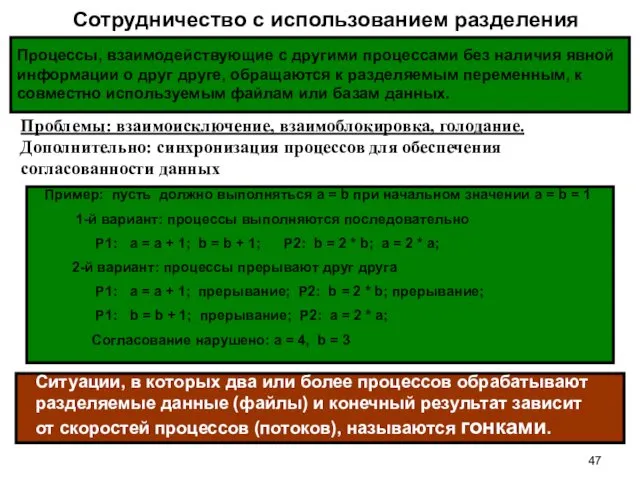
Сотрудничество с использованием разделения
Процессы, взаимодействующие с другими процессами без наличия явной
Сотрудничество с использованием разделения
Процессы, взаимодействующие с другими процессами без наличия явной
Методы взаимоисключений
Запрещение прерываний при входе в критическую область и разрешение прерываний
Методы взаимоисключений
Запрещение прерываний при входе в критическую область и разрешение прерываний

Использование системных функций входа в критическую секцию
Системный вызов
EnterCriticalSection()
Попытка доступа к
Использование системных функций входа в критическую секцию
Системный вызов
EnterCriticalSection()
Попытка доступа к
Семафоры Дийкстры (Dijkstra)
Семафор: переменная S, примитивы P (proberen – проверка; down)
Семафоры Дийкстры (Dijkstra)
Семафор: переменная S, примитивы P (proberen – проверка; down)

f
e
N
Начальные значения семафоров
e = N; f = 0
P(e)
Работа с разделяемым ресурсом
f
e
N
Начальные значения семафоров
e = N; f = 0
P(e)
Работа с разделяемым ресурсом
Взаимоблокировки (тупики)
Условия возникновения взаимоблокировки (тупиковой) ситуации:
Взаимное исключение. Каждый ресурс в данный
Взаимоблокировки (тупики)
Условия возникновения взаимоблокировки (тупиковой) ситуации:
Взаимное исключение. Каждый ресурс в данный
Методы обнаружения взаимоблокировок
В системе один ресурс каждого типа.
Например, пусть система
Методы обнаружения взаимоблокировок
В системе один ресурс каждого типа.
Например, пусть система
цикл
R
A
C
S
F
D
B
T
E
U
W
G
V
Граф ресурсов и процессов
цикл
R
A
C
S
F
D
B
T
E
U
W
G
V
Граф ресурсов и процессов
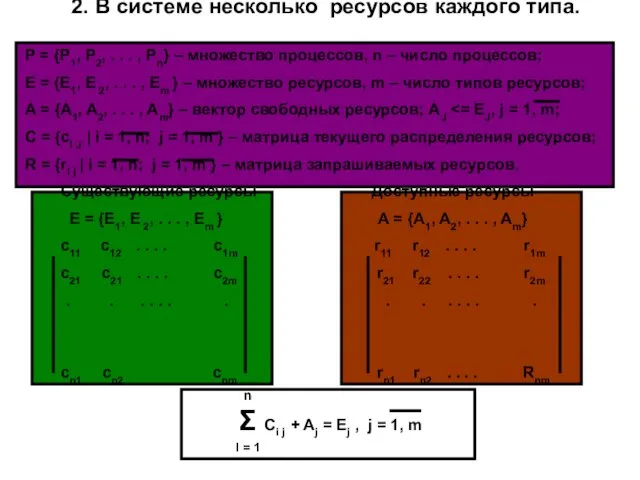
2. В системе несколько ресурсов каждого типа.
P = {P1, P2, .
2. В системе несколько ресурсов каждого типа.
P = {P1, P2, .
Алгоритм обнаружения тупиков
Основан на сравнении векторов ресурсов. В исходном состоянии все
Алгоритм обнаружения тупиков
Основан на сравнении векторов ресурсов. В исходном состоянии все
Методы устранения тупиков
Принудительная выгрузка ресурсов. Изъятие ресурса у процесса, передача его
Методы устранения тупиков
Принудительная выгрузка ресурсов. Изъятие ресурса у процесса, передача его
Синхронизирующие объекты ОС
Для синхронизации потоков, принадлежащих разным процессам, ОС должна предоставлять
Синхронизирующие объекты ОС
Для синхронизации потоков, принадлежащих разным процессам, ОС должна предоставлять
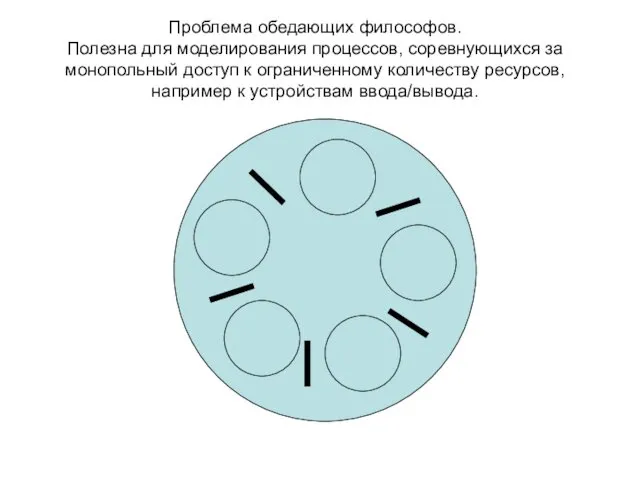
Проблема обедающих философов.
Полезна для моделирования процессов, соревнующихся за монопольный доступ
Проблема обедающих философов. Полезна для моделирования процессов, соревнующихся за монопольный доступ
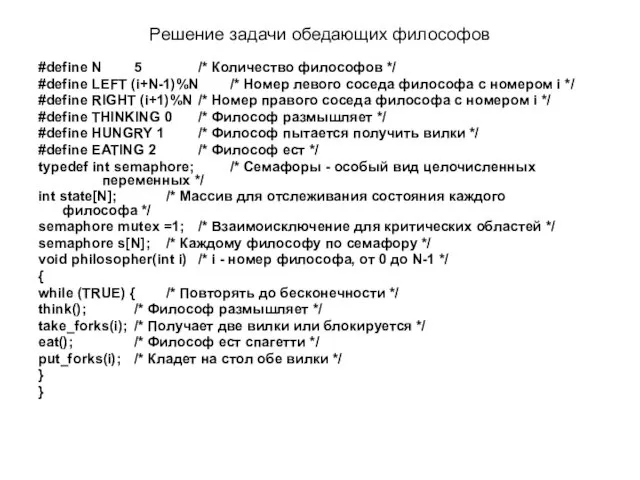
Решение задачи обедающих философов
#define N 5 /* Количество философов */
#define LEFT
Решение задачи обедающих философов
#define N 5 /* Количество философов */
#define LEFT
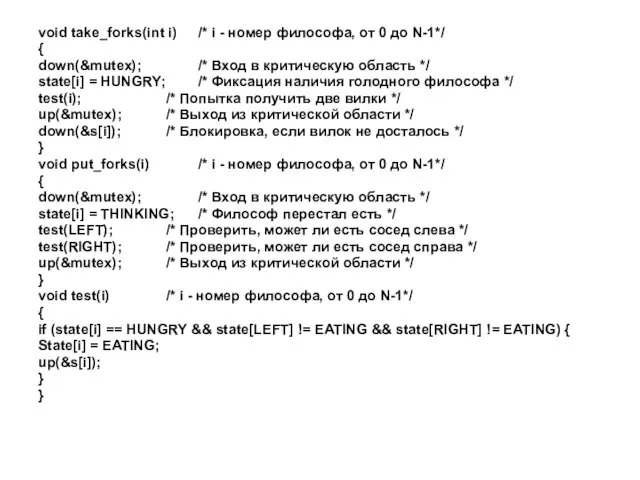
void take_forks(int i) /* i - номер философа, от 0 до
void take_forks(int i) /* i - номер философа, от 0 до

Траектории ресурсов
Диск
Диск
Траектории ресурсов
Диск
Диск

Алгоритм банкира
Алгоритм банкира
Межпроцессное взаимодействие (англ. Inter-Process Communication, IPC) — набор способов обмена данными
Межпроцессное взаимодействие (англ. Inter-Process Communication, IPC) — набор способов обмена данными
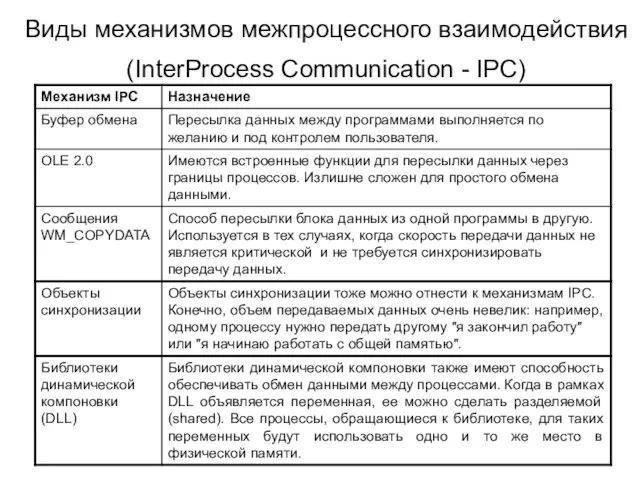
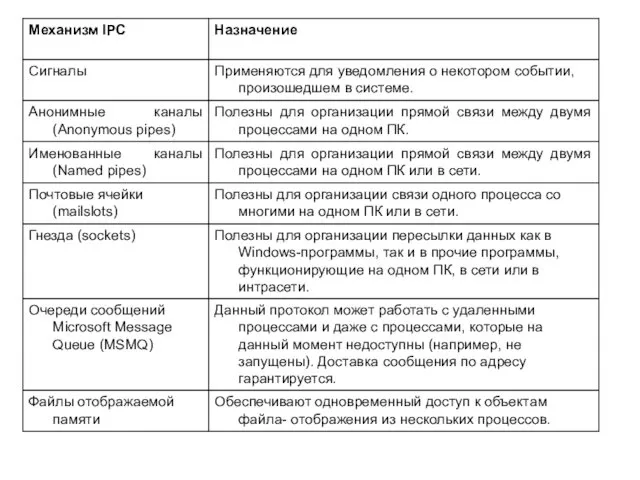
Виды механизмов межпроцессного взаимодействия (InterProcess Communication - IPC)
Виды механизмов межпроцессного взаимодействия (InterProcess Communication - IPC)
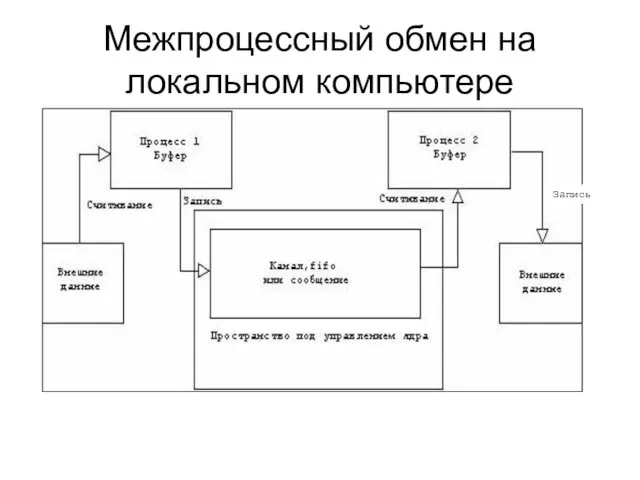
Межпроцессный обмен на локальном компьютере
Запись
Межпроцессный обмен на локальном компьютере
Запись
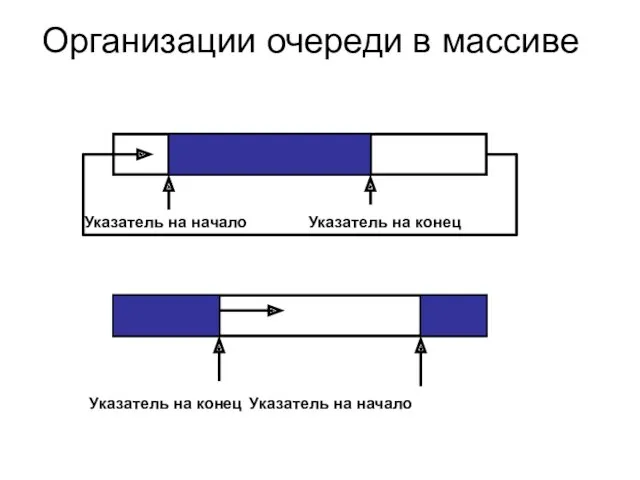
Организации очереди в массиве
Указатель на конец Указатель на начало
Организации очереди в массиве
Указатель на конец Указатель на начало
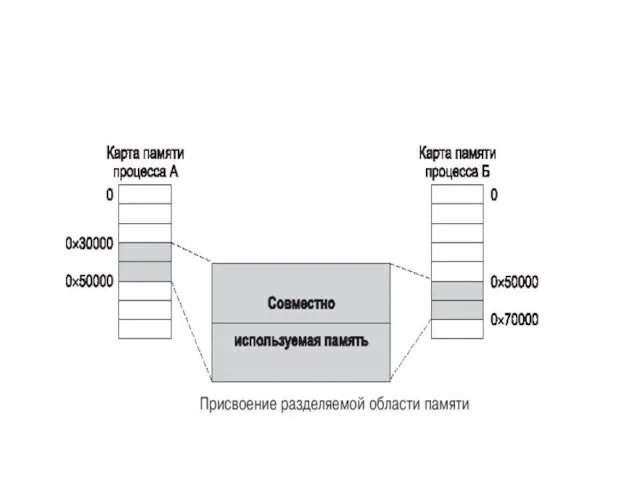

Отображаемые файлы
Отображаемые файлы

 Построение диаграмм в электронных таблицах. 8 класс
Построение диаграмм в электронных таблицах. 8 класс Наследование. Основы наследования. Лекция №8
Наследование. Основы наследования. Лекция №8 PowerPoint программасы тест
PowerPoint программасы тест Национальная программа сохранения библиотечных фондов
Национальная программа сохранения библиотечных фондов Программирование. Лекция 1
Программирование. Лекция 1 Электронные системы тестирования
Электронные системы тестирования Инструкция – настройки телефона
Инструкция – настройки телефона Применение ГИС в оперативном управлении и планировании чрезвычайных ситуаций
Применение ГИС в оперативном управлении и планировании чрезвычайных ситуаций Сортировка одномерного массива
Сортировка одномерного массива Представление чисел в компьютере. Математические основы информатики
Представление чисел в компьютере. Математические основы информатики Безопасный Интернет
Безопасный Интернет Правила заполнения таблицы
Правила заполнения таблицы История киберспорта
История киберспорта Этапы развития информационных технологий
Этапы развития информационных технологий Электронный процессор MS Excel. Создание диаграмм
Электронный процессор MS Excel. Создание диаграмм Системное программное обеспечение. (Лекция 8)
Системное программное обеспечение. (Лекция 8) Базы данных SQL
Базы данных SQL Введение в теорию информации и кодирования
Введение в теорию информации и кодирования 01 Лекция - Что такое DVB
01 Лекция - Что такое DVB Роль графического дизайнера в мультипликации
Роль графического дизайнера в мультипликации Қолданбалы программа Fine Reader
Қолданбалы программа Fine Reader Технология беспроводной связи Bluetooth и Wi-Fi
Технология беспроводной связи Bluetooth и Wi-Fi Сказка Смайлик
Сказка Смайлик Подготовка к ЕГЭ. Задание №27
Подготовка к ЕГЭ. Задание №27 Программирование (C++)
Программирование (C++) Сущность и понятие информационной безопасности (ИБ). Место информационной безопасности в национальной безопасности страны
Сущность и понятие информационной безопасности (ИБ). Место информационной безопасности в национальной безопасности страны Қабырғалық баяндама. Постер жасауға арналған веб сайттар
Қабырғалық баяндама. Постер жасауға арналған веб сайттар Типология интернет-СМИ
Типология интернет-СМИ