- Самодельный робот-манипулятор с дистанционным управлением

Содержание
- 2. Что такое робот-манипулятор? Робот-манипулятор – это механизм для управления пространственным положением орудий, объектов труда и конструкционных
- 3. Зачем нам делать свой собственный манипулятор и в чём его отличие от промышленных? Промышленные манипуляторы не
- 4. Каким должен быть манипулятор? Робот должен быть небольших размеров, но достаточно поворотливым для выполнения команд. Ради
- 5. Также нужно дать пользователям возможность самим дополнять нашего робота, дать возможность подключать электронные компоненты, которые нужны
- 6. Теперь самый главный вопрос, а зачем людям нужен манипулятор? Главным образом манипуляторы нужны для людей с
- 7. Итак, что у нас уже есть Материалом для корпуса, ввиду свой практичности и доступности, была выбрана
- 8. Первая модель, для наглядности и простоты будет управляться дистанционно через ИК пульт
- 9. Схема подключения
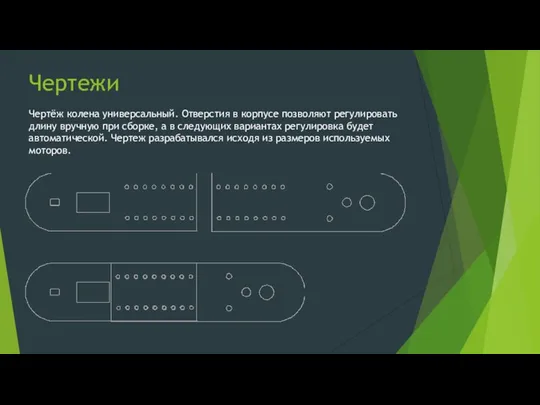
- 10. Чертежи Чертёж колена универсальный. Отверстия в корпусе позволяют регулировать длину вручную при сборке, а в следующих
- 11. Клешня Варианты клешней с сервомашинкой.
- 13. Скачать презентацию
Что такое робот-манипулятор?
Робот-манипулятор – это механизм для управления пространственным положением орудий,
Что такое робот-манипулятор?
Робот-манипулятор – это механизм для управления пространственным положением орудий,
Зачем нам делать свой собственный манипулятор и в чём его отличие
Зачем нам делать свой собственный манипулятор и в чём его отличие
Каким должен быть манипулятор?
Робот должен быть небольших размеров, но достаточно поворотливым
Каким должен быть манипулятор?
Робот должен быть небольших размеров, но достаточно поворотливым
Также нужно дать пользователям возможность самим дополнять нашего робота, дать возможность
Также нужно дать пользователям возможность самим дополнять нашего робота, дать возможность
Теперь самый главный вопрос, а зачем людям нужен манипулятор?
Главным образом манипуляторы
Теперь самый главный вопрос, а зачем людям нужен манипулятор?
Главным образом манипуляторы

Итак, что у нас уже есть
Материалом для корпуса, ввиду свой практичности
Итак, что у нас уже есть
Материалом для корпуса, ввиду свой практичности
Первая модель, для наглядности и простоты будет управляться дистанционно через ИК
Первая модель, для наглядности и простоты будет управляться дистанционно через ИК
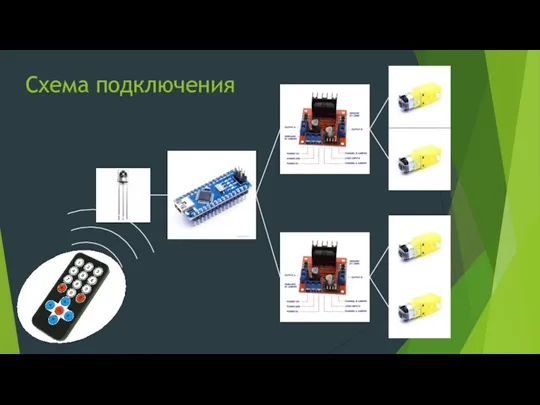
Схема подключения
Схема подключения
Чертежи
Чертёж колена универсальный. Отверстия в корпусе позволяют регулировать длину вручную при
Чертежи
Чертёж колена универсальный. Отверстия в корпусе позволяют регулировать длину вручную при

Клешня
Варианты клешней с сервомашинкой.
Клешня
Варианты клешней с сервомашинкой.
 Разработка и стандартизация программных средств и информационных технологий
Разработка и стандартизация программных средств и информационных технологий Деректердің иерархиялық моделі
Деректердің иерархиялық моделі Презентация к уроку Съёмные носители информации
Презентация к уроку Съёмные носители информации Использование геоинформационных систем при обновлении крупномасштабных топографических карт
Использование геоинформационных систем при обновлении крупномасштабных топографических карт Защита информации
Защита информации Контур. ERP Фокус для SAP - RU 3
Контур. ERP Фокус для SAP - RU 3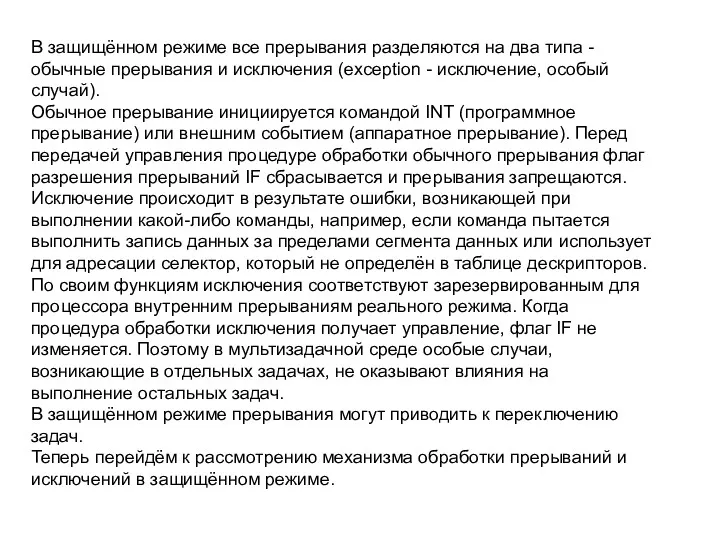 Прерывания в защищённом режиме
Прерывания в защищённом режиме Логические элементы компьютера
Логические элементы компьютера Веб-сайт туристского предприятия как инструмент продвижения гостиничных услуг
Веб-сайт туристского предприятия как инструмент продвижения гостиничных услуг Система делает возможным приобрести билеты на многие мероприятия на сайте
Система делает возможным приобрести билеты на многие мероприятия на сайте Создание, изменение и удаление таблиц
Создание, изменение и удаление таблиц Страничный механизм трансляции. (Тема 14)
Страничный механизм трансляции. (Тема 14) Обобщенные методы и классы. Лекция 35
Обобщенные методы и классы. Лекция 35 Графика. Графический режим
Графика. Графический режим Проектування мобільних застосунків. Ресурси (Лекція №5)
Проектування мобільних застосунків. Ресурси (Лекція №5) Створення комп'ютерних презентацій (10 клас)
Створення комп'ютерних презентацій (10 клас) Использование технологий ТРИЗ для повышения мотивации обучения при изучении отдельных разделов информатики
Использование технологий ТРИЗ для повышения мотивации обучения при изучении отдельных разделов информатики Тема: Интернет. Всемирная паутина.
Тема: Интернет. Всемирная паутина. Комп’ютерні віруси
Комп’ютерні віруси Веб-сайт Интернет-магазин оружия
Веб-сайт Интернет-магазин оружия Компьютерная графика. Обработка графической информации
Компьютерная графика. Обработка графической информации Верификация приложений
Верификация приложений Робик. Команды для Робика (3 кл.)
Робик. Команды для Робика (3 кл.) Обработка информации
Обработка информации Компьютерная графика. Векторная и растровая графика
Компьютерная графика. Векторная и растровая графика Новости (НЕ)больших городов. Что такое журналистика?
Новости (НЕ)больших городов. Что такое журналистика? История Windows OC
История Windows OC Презентация по информатике
Презентация по информатике