- Синтез линейной системы управления

Содержание
- 2. Содержание лекции Этапы синтеза алгоритма управления. Общий алгоритм расчета управления. Формирование цели и эталонной модели. Нахождение
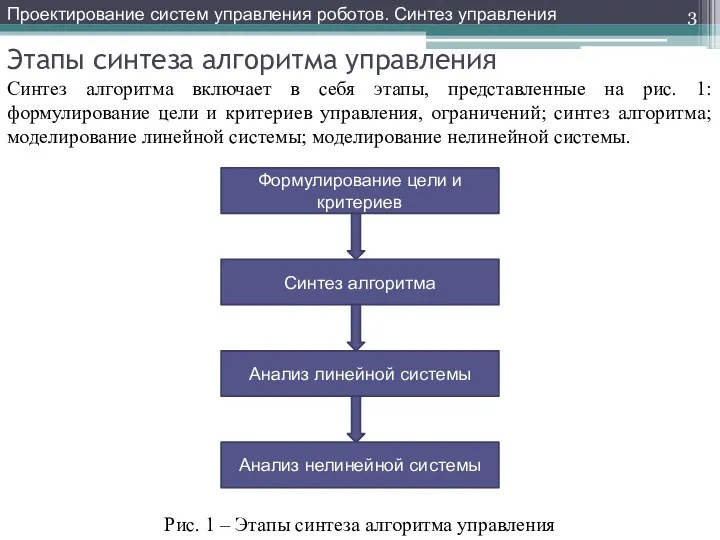
- 3. Этапы синтеза алгоритма управления Синтез алгоритма включает в себя этапы, представленные на рис. 1: формулирование цели
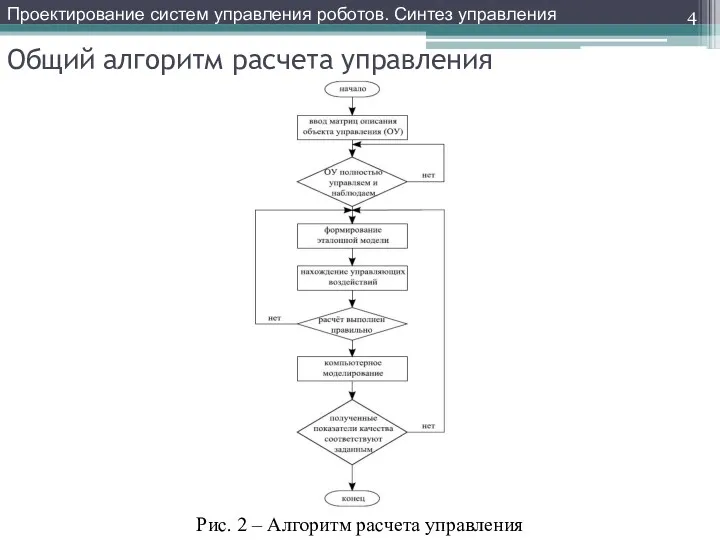
- 4. Общий алгоритм расчета управления Рис. 2 – Алгоритм расчета управления Проектирование систем управления роботов. Синтез управления
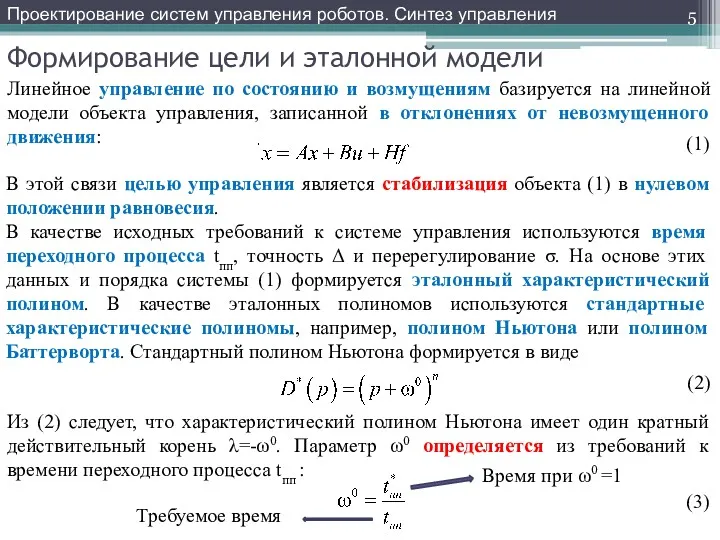
- 5. Формирование цели и эталонной модели Линейное управление по состоянию и возмущениям базируется на линейной модели объекта
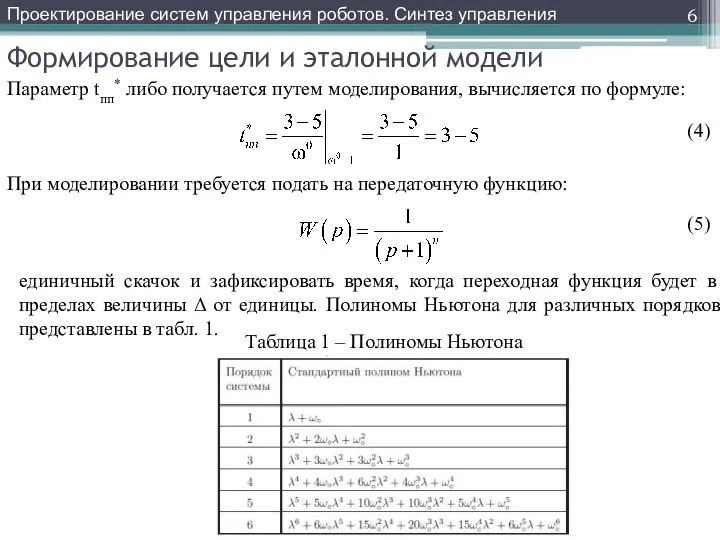
- 6. Формирование цели и эталонной модели Параметр tпп* либо получается путем моделирования, вычисляется по формуле: Проектирование систем
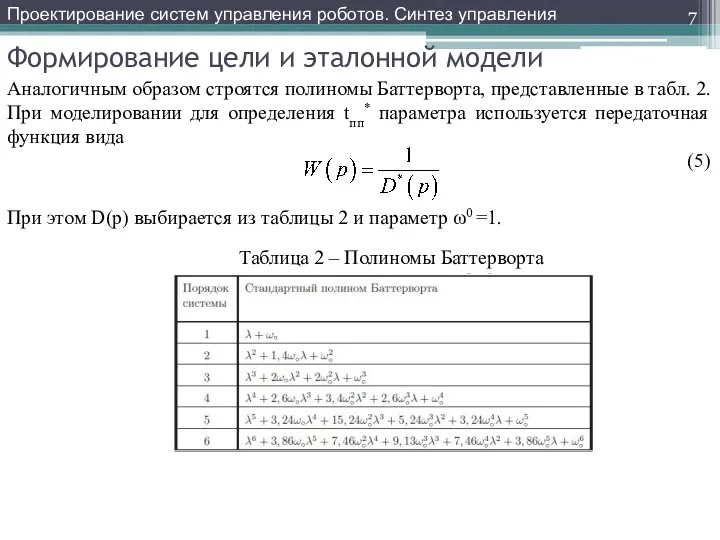
- 7. Формирование цели и эталонной модели Аналогичным образом строятся полиномы Баттерворта, представленные в табл. 2. При моделировании
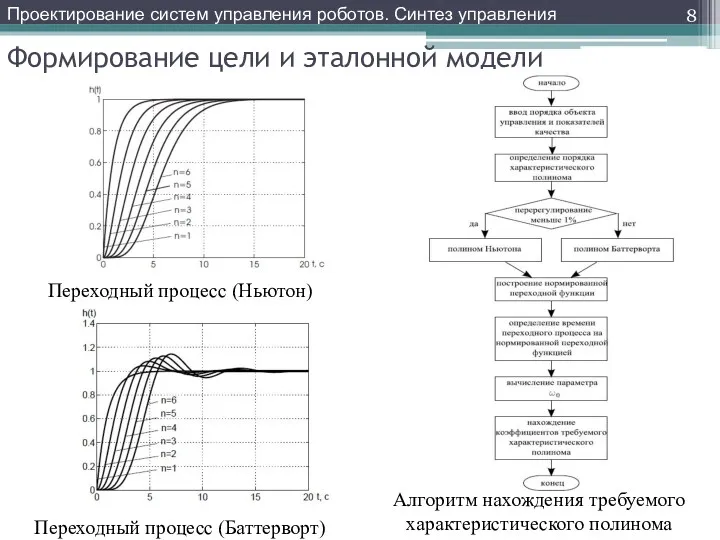
- 8. Формирование цели и эталонной модели Проектирование систем управления роботов. Синтез управления Алгоритм нахождения требуемого характеристического полинома
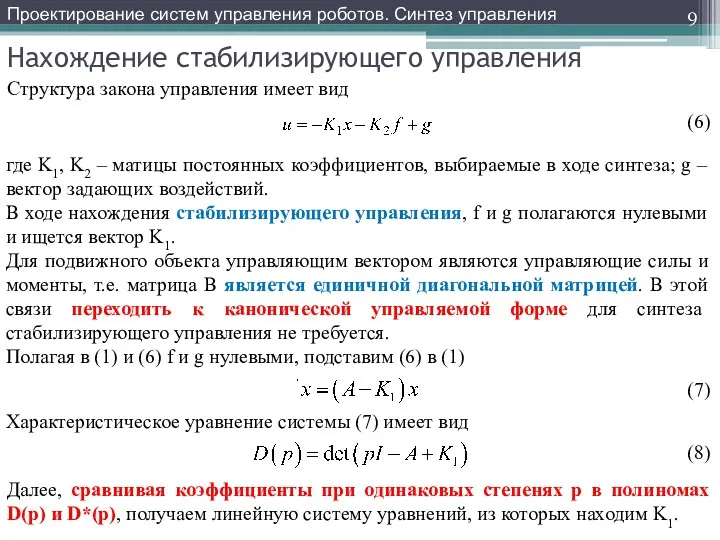
- 9. Нахождение стабилизирующего управления Проектирование систем управления роботов. Синтез управления Структура закона управления имеет вид (6) где
- 10. Компенсация возмущения Проектирование систем управления роботов. Синтез управления Подставим управление (6) в (1) (9) Чтобы возмущение
- 11. Вычисление задающего воздействия Проектирование систем управления роботов. Синтез управления Для того, чтобы вычислить вектор g, положим
- 12. Пример Проектирование систем управления роботов. Синтез управления Рассмотрим линейную модель двигателя постоянного тока Собственная матрица и
- 13. Приводы роботов. Лекция 4 Пример Характеристический полином системы (16) равен (17) Пусть желаемый характеристический полином имеет
- 15. Скачать презентацию
Содержание лекции
Этапы синтеза алгоритма управления.
Общий алгоритм расчета управления.
Формирование цели и эталонной
Содержание лекции
Этапы синтеза алгоритма управления.
Общий алгоритм расчета управления.
Формирование цели и эталонной
Этапы синтеза алгоритма управления
Синтез алгоритма включает в себя этапы, представленные на
Этапы синтеза алгоритма управления
Синтез алгоритма включает в себя этапы, представленные на
Общий алгоритм расчета управления
Рис. 2 – Алгоритм расчета управления
Проектирование систем управления
Общий алгоритм расчета управления
Рис. 2 – Алгоритм расчета управления
Проектирование систем управления
Формирование цели и эталонной модели
Линейное управление по состоянию и возмущениям базируется
Формирование цели и эталонной модели
Линейное управление по состоянию и возмущениям базируется
Формирование цели и эталонной модели
Параметр tпп* либо получается путем моделирования, вычисляется
Формирование цели и эталонной модели
Параметр tпп* либо получается путем моделирования, вычисляется
Формирование цели и эталонной модели
Аналогичным образом строятся полиномы Баттерворта, представленные в
Формирование цели и эталонной модели
Аналогичным образом строятся полиномы Баттерворта, представленные в
Формирование цели и эталонной модели
Проектирование систем управления роботов. Синтез управления
Алгоритм нахождения
Формирование цели и эталонной модели
Проектирование систем управления роботов. Синтез управления
Алгоритм нахождения
Нахождение стабилизирующего управления
Проектирование систем управления роботов. Синтез управления
Структура закона управления имеет
Нахождение стабилизирующего управления
Проектирование систем управления роботов. Синтез управления
Структура закона управления имеет
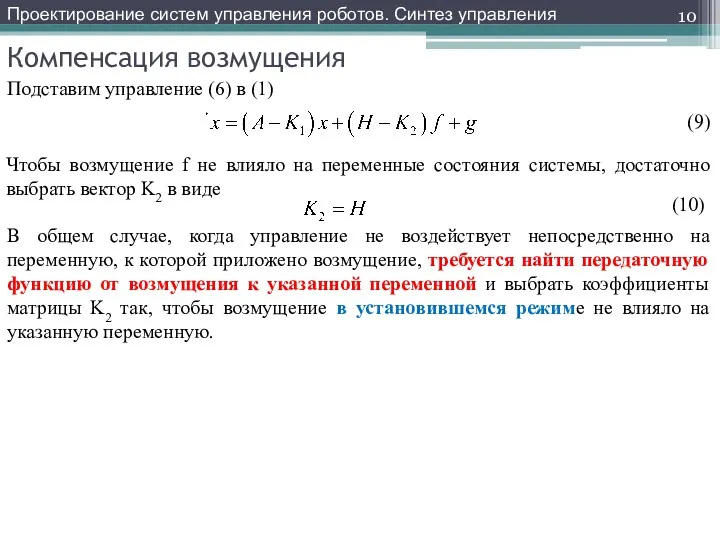
Компенсация возмущения
Проектирование систем управления роботов. Синтез управления
Подставим управление (6) в (1)
(9)
Чтобы
Компенсация возмущения
Проектирование систем управления роботов. Синтез управления
Подставим управление (6) в (1)
(9)
Чтобы
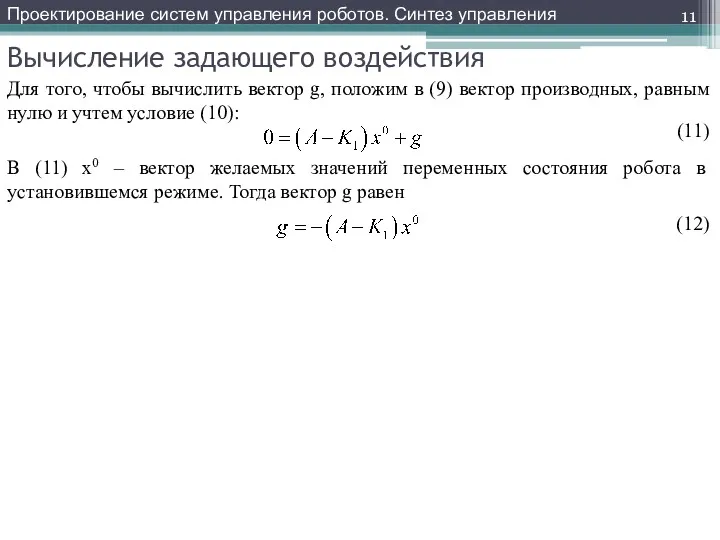
Вычисление задающего воздействия
Проектирование систем управления роботов. Синтез управления
Для того, чтобы вычислить
Вычисление задающего воздействия
Проектирование систем управления роботов. Синтез управления
Для того, чтобы вычислить
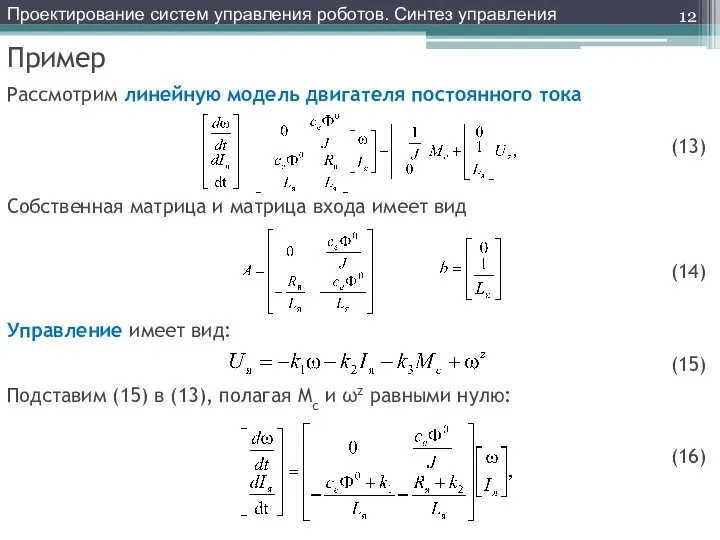
Пример
Проектирование систем управления роботов. Синтез управления
Рассмотрим линейную модель двигателя постоянного тока
Собственная
Пример
Проектирование систем управления роботов. Синтез управления
Рассмотрим линейную модель двигателя постоянного тока
Собственная
Приводы роботов. Лекция 4
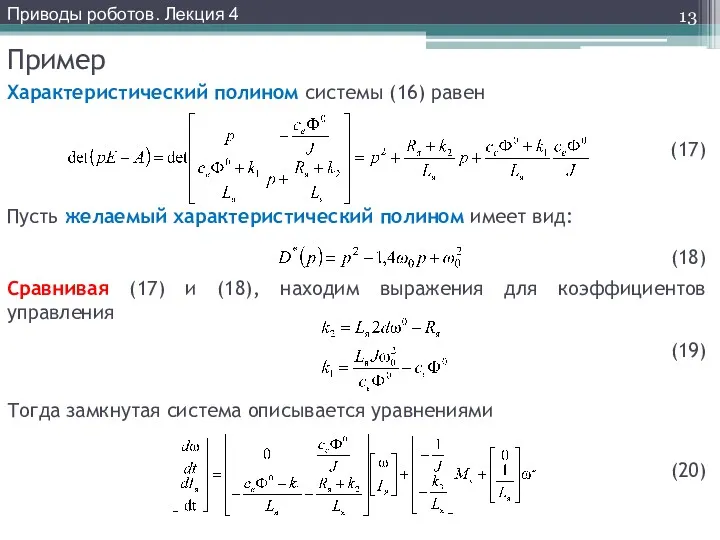
Пример
Характеристический полином системы (16) равен
(17)
Пусть желаемый характеристический полином
Приводы роботов. Лекция 4
Пример
Характеристический полином системы (16) равен
(17)
Пусть желаемый характеристический полином
 Методы исследования и моделирования информационных процессов и технологий
Методы исследования и моделирования информационных процессов и технологий С++ бағдарламалау тілі
С++ бағдарламалау тілі Организация и инструментальные средства информационных технологий управления
Организация и инструментальные средства информационных технологий управления Модульное тестирование с JUnit
Модульное тестирование с JUnit Понятие модели. Назначение и свойства моделей
Понятие модели. Назначение и свойства моделей Паттерны = Шаблоны проектирования
Паттерны = Шаблоны проектирования Циклические структуры
Циклические структуры Передача информации
Передача информации Основы тестирования
Основы тестирования Типы данных
Типы данных Системы счисления
Системы счисления Автомобили без водителя. Беспилотные автомобили Google
Автомобили без водителя. Беспилотные автомобили Google Аппаратные методы защиты информации
Аппаратные методы защиты информации ЭЕМ-нің жұмың істеу принциптері
ЭЕМ-нің жұмың істеу принциптері Кодирование текстовой информации. Задачи
Кодирование текстовой информации. Задачи Проблемы анализа данных в медико-биологических исследованиях. StatSoft Russia
Проблемы анализа данных в медико-биологических исследованиях. StatSoft Russia Средства массовой информации (СМИ) и их роль в современном обществе
Средства массовой информации (СМИ) и их роль в современном обществе Написание вводной и методической частей статьи либо заявки на получение гранта. (Лекция 5)
Написание вводной и методической частей статьи либо заявки на получение гранта. (Лекция 5) Безопасность в сети Интернет
Безопасность в сети Интернет Разработка управляющих программ для станков с числовым программным управлением
Разработка управляющих программ для станков с числовым программным управлением Компютерное моделирование
Компютерное моделирование Основы программирования: ТЕМА 10. РЕКУРСИЯ.
Основы программирования: ТЕМА 10. РЕКУРСИЯ. Индивидуальный практикум по информатике
Индивидуальный практикум по информатике M/EEG source analysis
M/EEG source analysis Коллекции в Java
Коллекции в Java Интернет-технологии и распределённая обработка данных. Лекция 7
Интернет-технологии и распределённая обработка данных. Лекция 7 презентация по информатике Информационные системы, 11 класс
презентация по информатике Информационные системы, 11 класс Электронное портфолио
Электронное портфолио