- Системы реального времени

Содержание
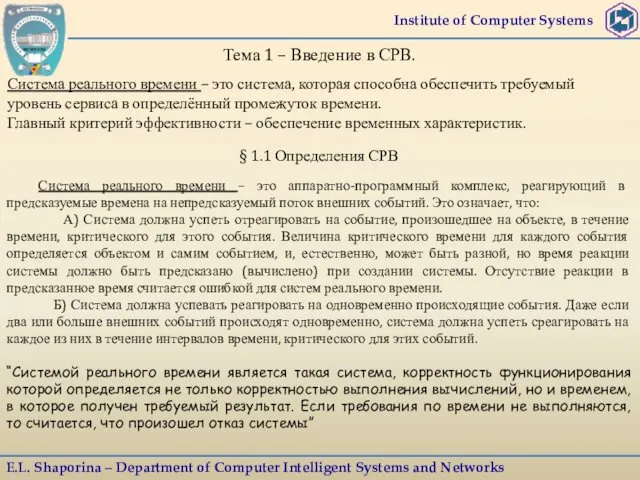
- 2. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Тема 1
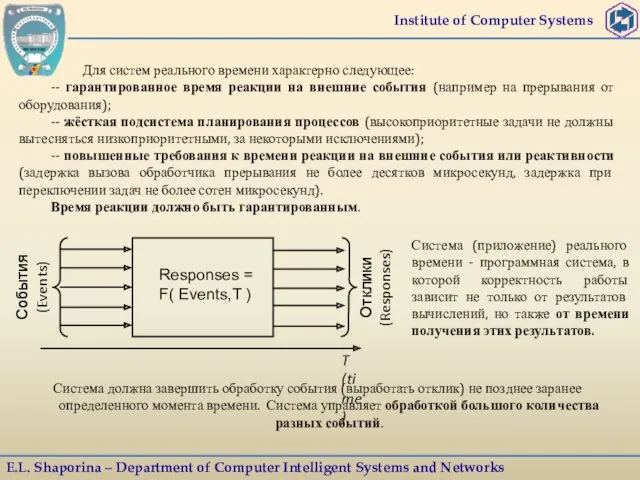
- 3. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Для систем
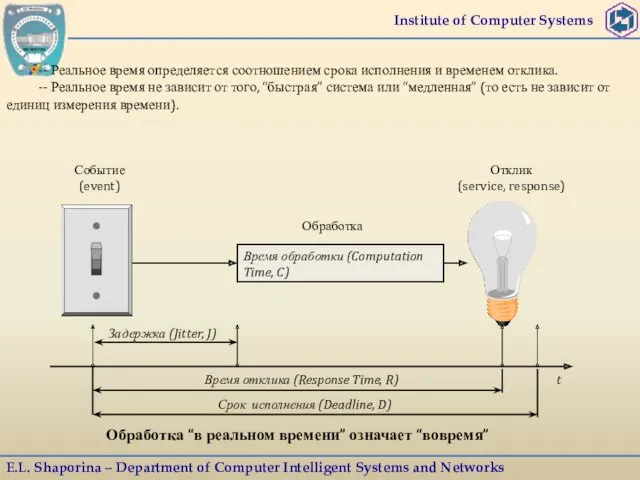
- 4. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks -- Реальное
- 5. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Вывод: 1.
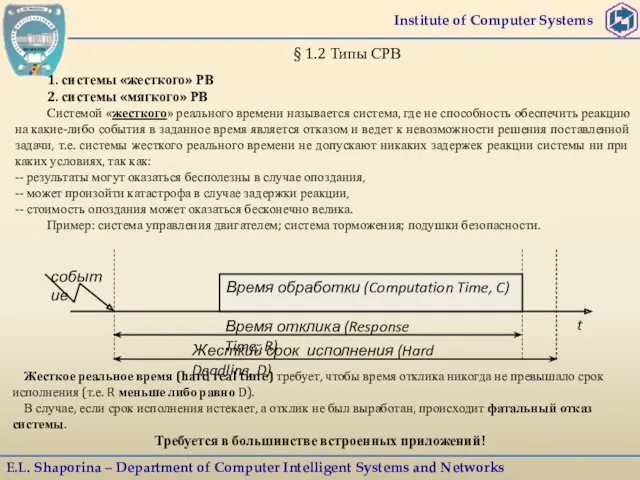
- 6. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks § 1.2
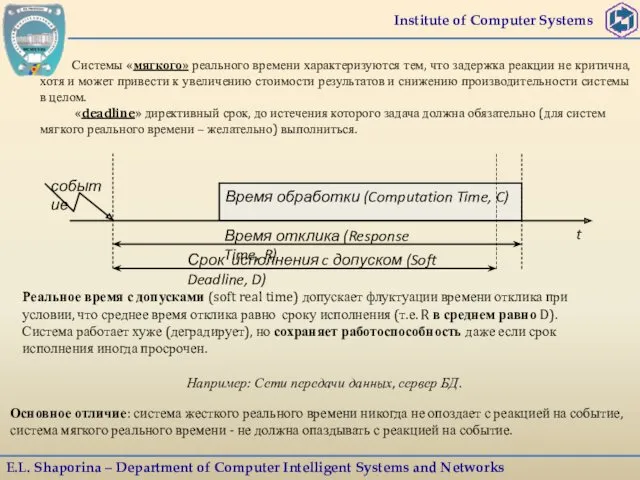
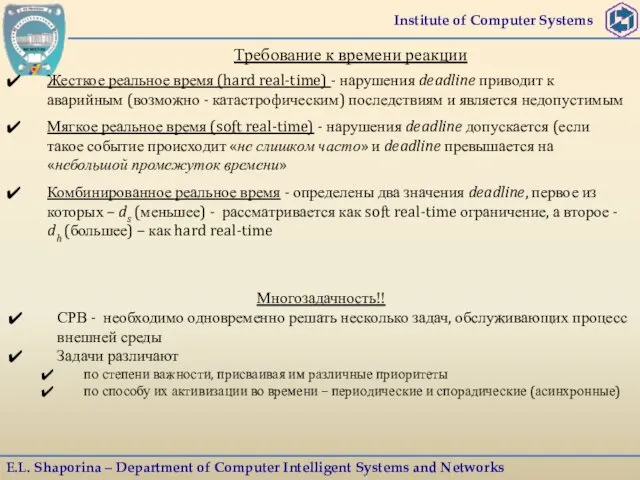
- 7. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Системы «мягкого»
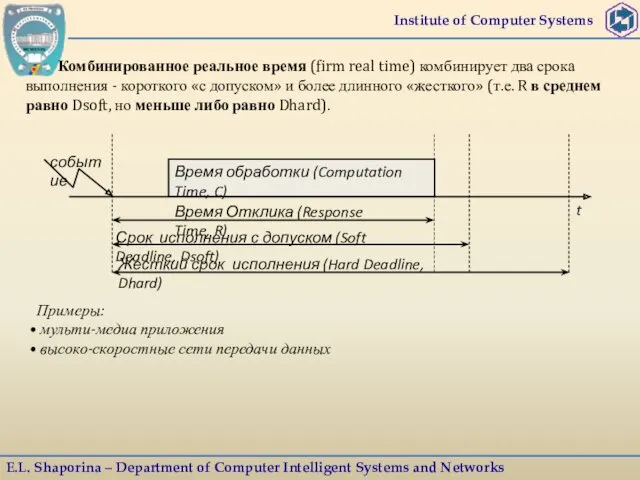
- 8. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Комбинированное реальное
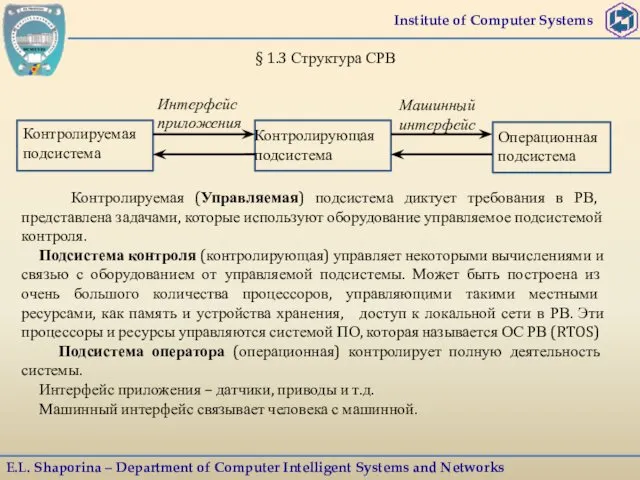
- 9. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks § 1.3
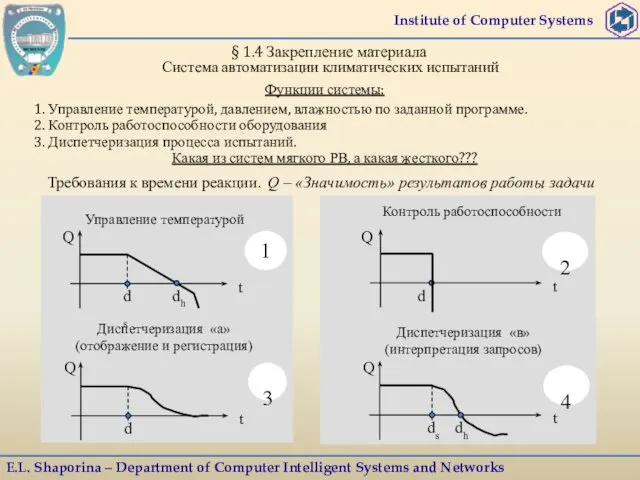
- 10. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks § 1.4
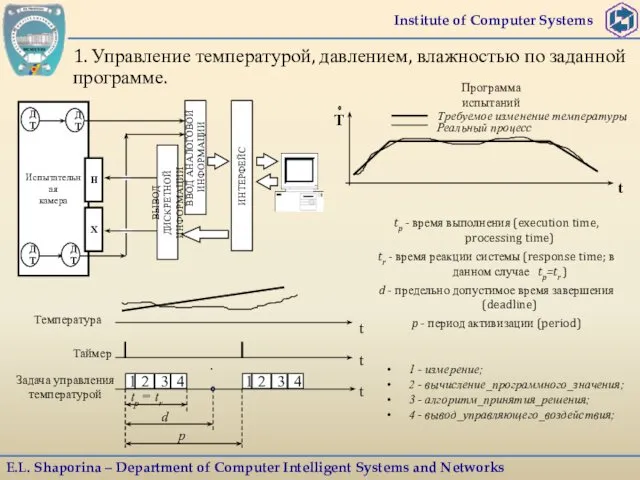
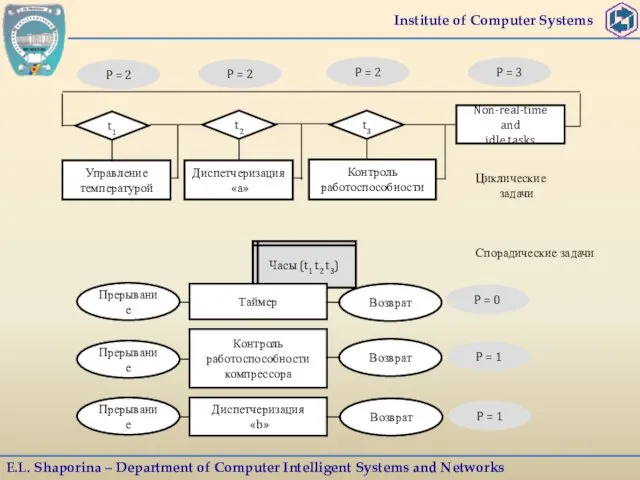
- 11. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 1. Управление
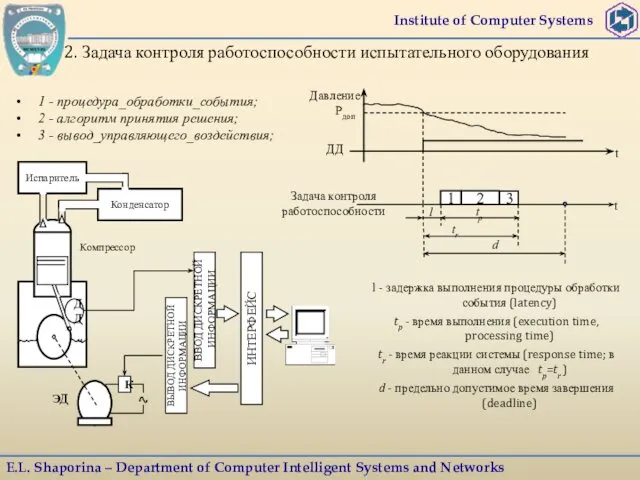
- 12. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2. Задача
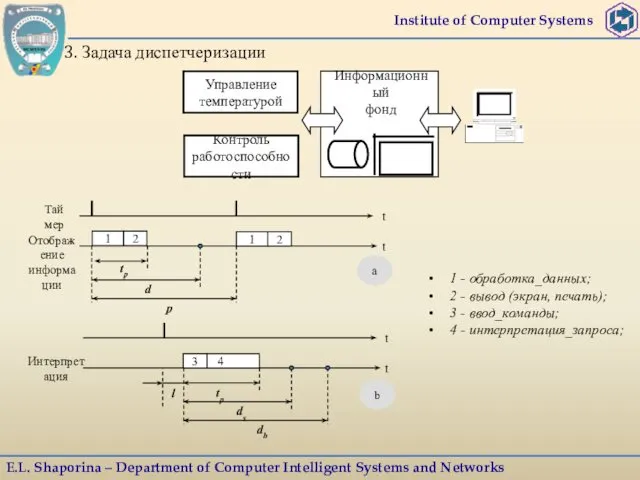
- 13. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 3. Задача
- 14. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Требование к
- 15. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks
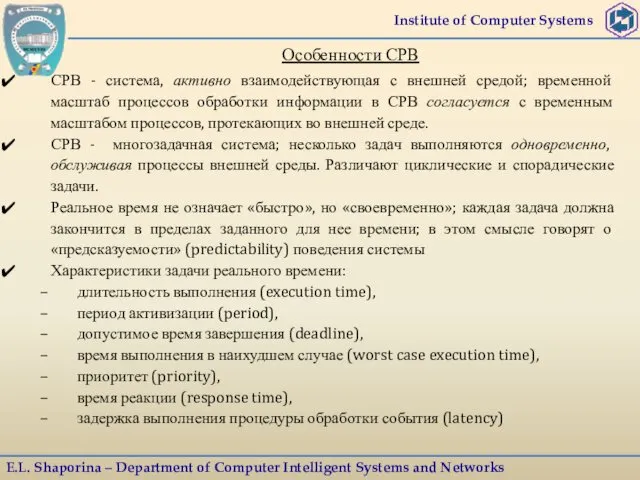
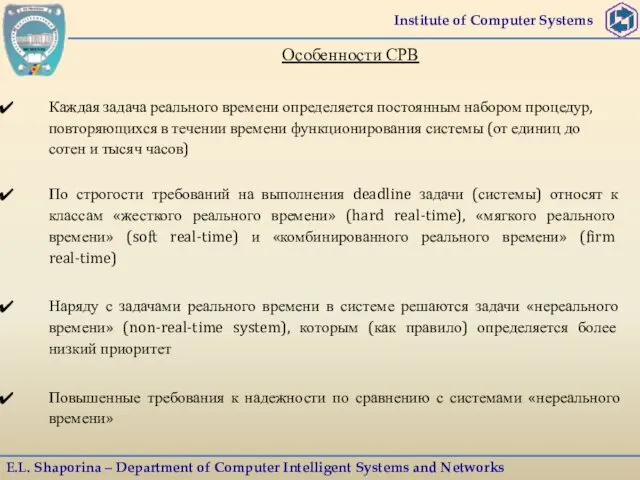
- 16. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Особенности СРВ
- 17. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Особенности СРВ
- 18. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks § 2
- 19. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2.2 Различия
- 20. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2.3 Характеристики
- 21. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2.4 Механизмы
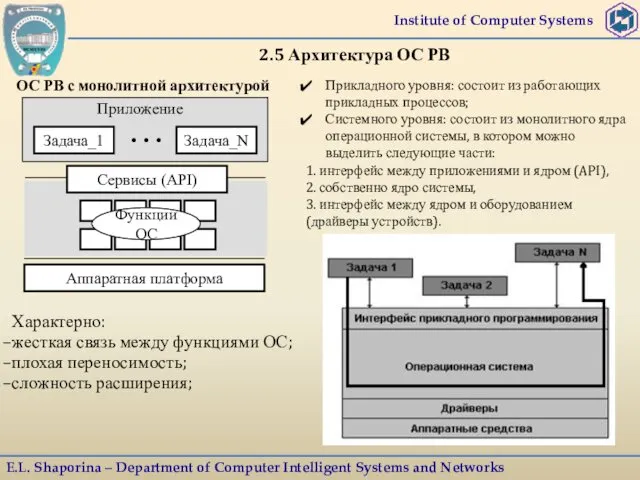
- 22. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2.5 Архитектура
- 23. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks ОС РВ
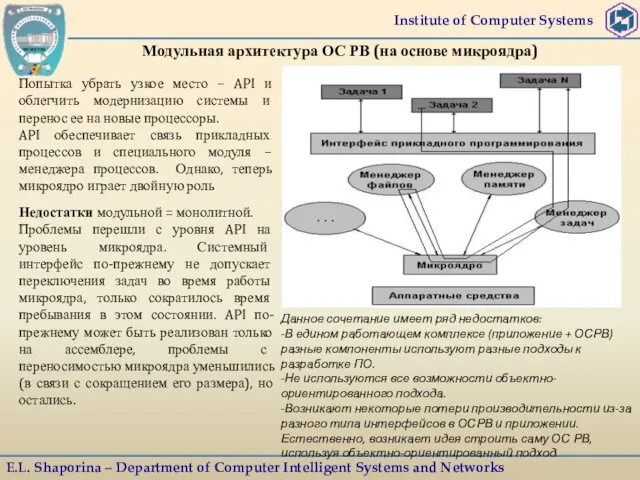
- 24. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Модульная архитектура
- 25. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Объектно –
- 26. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 2.6 Классы
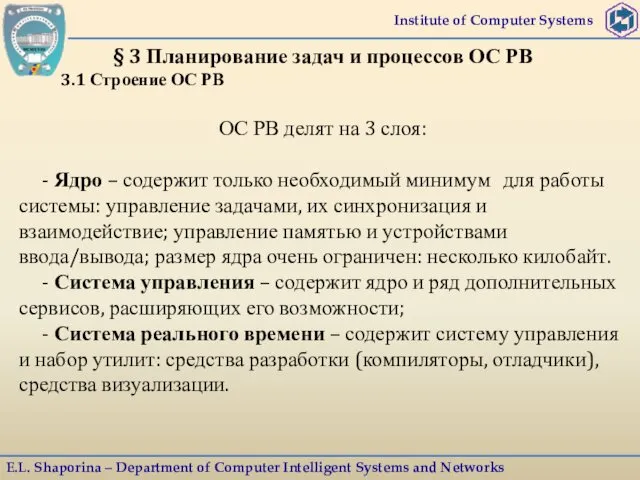
- 27. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks § 3
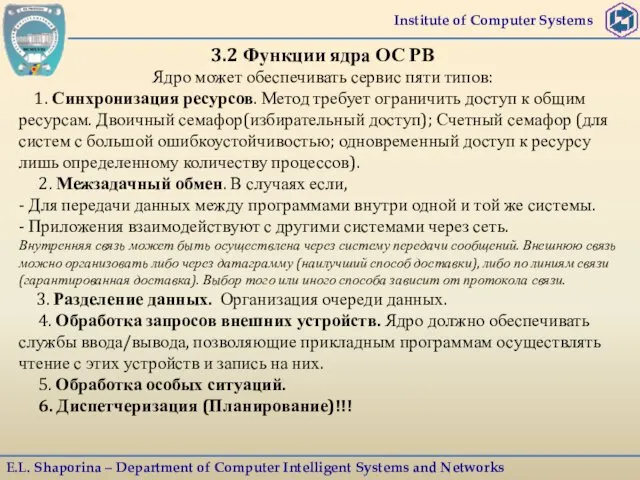
- 28. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 3.2 Функции
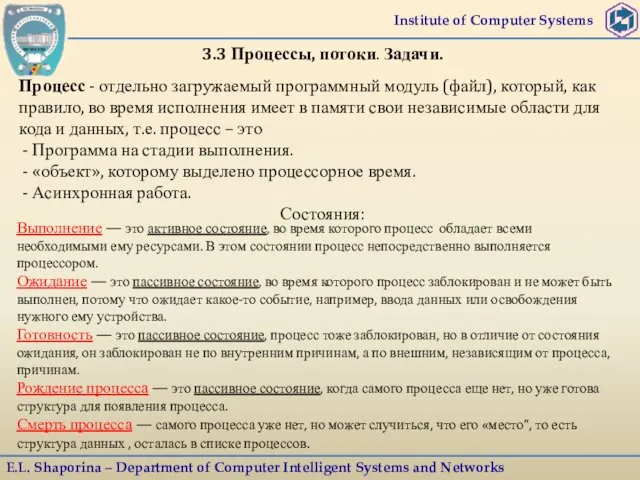
- 29. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks 3.3 Процессы,
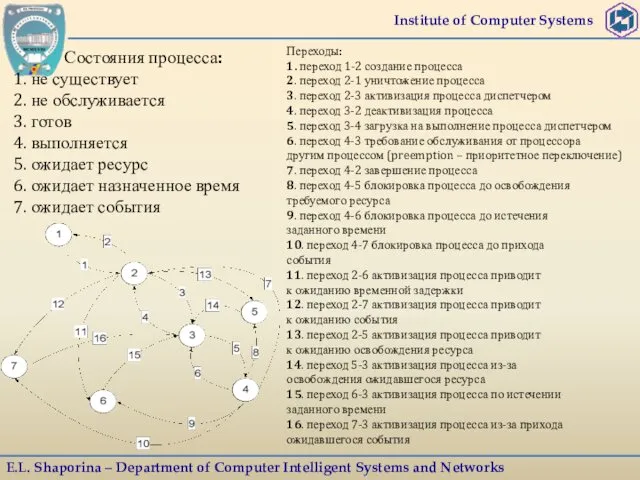
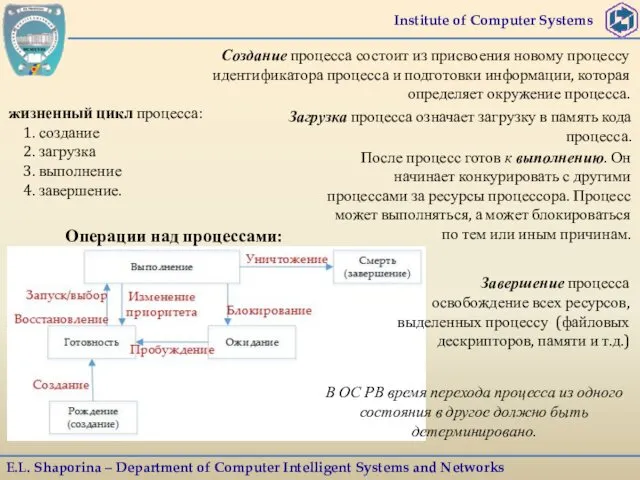
- 30. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Состояния процесса:
- 31. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Операции над
- 32. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Для создания
- 33. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Потоки Поток
- 34. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Преимущества потоков:
- 35. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Недостатки потоков:
- 36. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Если операционная
- 37. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks СРВ —
- 38. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Работа задачи
- 39. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Параметры определяются
- 40. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Свойства задач.
- 41. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Контекст задачи
- 42. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Пустая задача
- 43. Institute of Computer Systems E.L. Shaporina – Department of Computer Intelligent Systems and Networks Задачи реального
- 45. Скачать презентацию
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems

Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
Institute of Computer Systems
E.L. Shaporina – Department of Computer Intelligent Systems
 Автоматизированная система организации спортивных мероприятий
Автоматизированная система организации спортивных мероприятий Увлекательный киберспорт, или какие игры лучше для трансляций
Увлекательный киберспорт, или какие игры лучше для трансляций Причины и типы ошибок
Причины и типы ошибок Информационные ресурсы современного общества
Информационные ресурсы современного общества Методика обеспечения строительного контроля с использованием информационной модели здания
Методика обеспечения строительного контроля с использованием информационной модели здания Файлы и файловая система
Файлы и файловая система Устройство компьютера. Носители информации ( 5 класс)
Устройство компьютера. Носители информации ( 5 класс) Применение динамических массивов в структурном подходе
Применение динамических массивов в структурном подходе Методическая разработка урока по теме Компьютерные вирусы. Антивирусные программы
Методическая разработка урока по теме Компьютерные вирусы. Антивирусные программы Сетевая этика. Культура общения в сети
Сетевая этика. Культура общения в сети Верификация программного обеспечения. Дефекты
Верификация программного обеспечения. Дефекты WEB-программирование, семинар 5
WEB-программирование, семинар 5 Новые пакеты услуг Кибернетики
Новые пакеты услуг Кибернетики Работа в ПО Sieble
Работа в ПО Sieble Графические редакторы MediaBang Paint Pro и Artwaver Free
Графические редакторы MediaBang Paint Pro и Artwaver Free База данных как модель предметной области
База данных как модель предметной области Повышение эффективности работы баз данных. Обработка транзакций OLTP-OLAP системы мониторы транзакций
Повышение эффективности работы баз данных. Обработка транзакций OLTP-OLAP системы мониторы транзакций Парсинг HTML. Краткий обзор технологий для понимания сбора и обработки данных
Парсинг HTML. Краткий обзор технологий для понимания сбора и обработки данных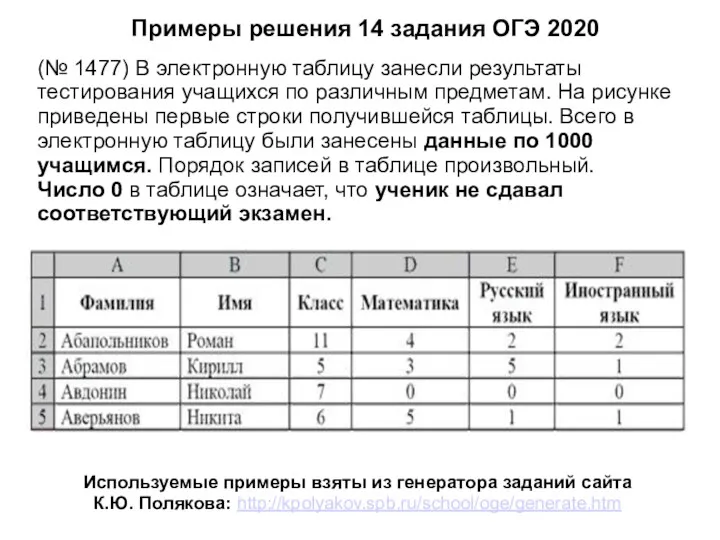 Примеры решения задания 14, ОГЭ по информатике
Примеры решения задания 14, ОГЭ по информатике Программы для видеоконференций. Введение
Программы для видеоконференций. Введение Онлайн-сервисы для создания электронных игр и викторин
Онлайн-сервисы для создания электронных игр и викторин Автоматизация научных исследований
Автоматизация научных исследований Цвет. Background. Градиент
Цвет. Background. Градиент Методическая разработка внеклассного мероприятия (интеллектуальная игра) по физике и информатике для учащихся 5-11 классов Кто хочет стать отличником
Методическая разработка внеклассного мероприятия (интеллектуальная игра) по физике и информатике для учащихся 5-11 классов Кто хочет стать отличником Операционная система
Операционная система Нові можливості функцій в мові С++
Нові можливості функцій в мові С++ Переход от инфологического моделирования к моделям данных и знаний. Логико-лингвистические модели представления знаний
Переход от инфологического моделирования к моделям данных и знаний. Логико-лингвистические модели представления знаний КВН по информатике
КВН по информатике