- Smart Technologies. Automation and Robotics

Содержание
- 2. Motivation Intelligent Environments are aimed at improving the inhabitants’ experience and task performance Automate functions in
- 3. Automation and Robotics in Intelligent Environments Control of the physical environment Automated blinds Thermostats and heating
- 4. Robots Robota (Czech) = A worker of forced labor From Czech playwright Karel Capek's 1921 play
- 5. A Brief History of Robotics Mechanical Automata Ancient Greece & Egypt Water powered for ceremonies 14th
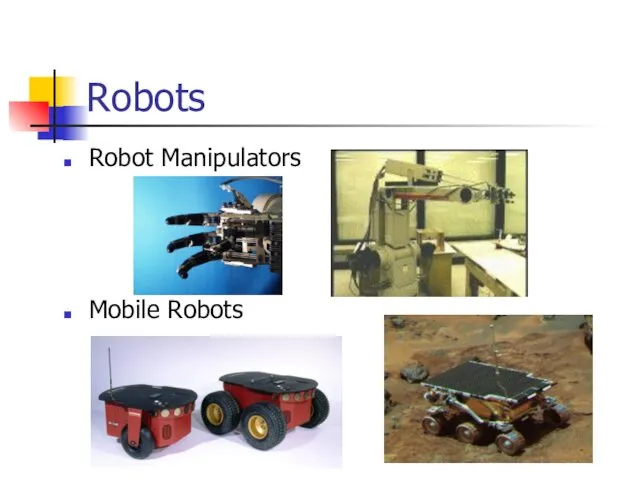
- 6. Robots Robot Manipulators Mobile Robots
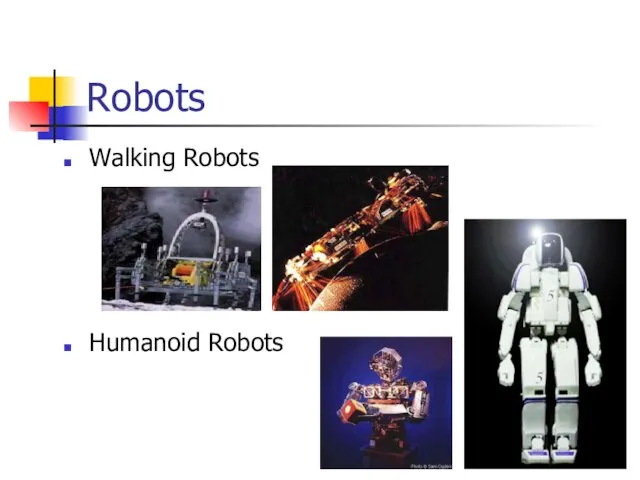
- 7. Robots Walking Robots Humanoid Robots
- 8. Autonomous Robots The control of autonomous robots involves a number of subtasks Understanding and modeling of
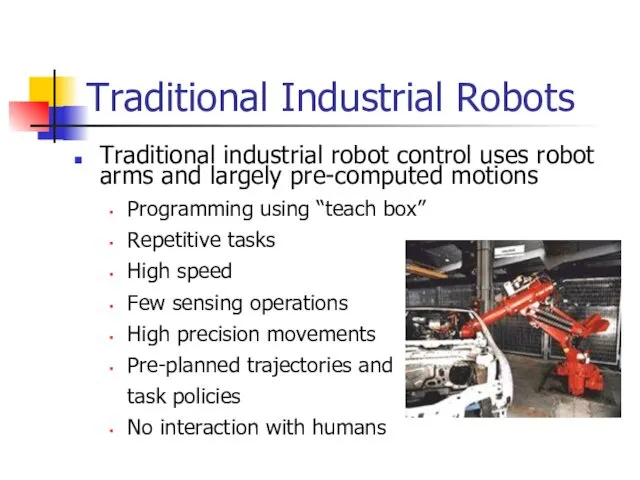
- 9. Traditional Industrial Robots Traditional industrial robot control uses robot arms and largely pre-computed motions Programming using
- 10. Problems Traditional programming techniques for industrial robots lack key capabilities necessary in intelligent environments Only limited
- 11. Requirements for Robots in Intelligent Environments Autonomy Robots have to be capable of achieving task objectives
- 12. Robots for Intelligent Environments Service Robots Security guard Delivery Cleaning Mowing Assistance Robots Mobility Services for
- 13. Autonomous Robot Control To control robots to perform tasks autonomously a number of tasks have to
- 14. Forward kinematics describes how the robots joint angle configurations translate to locations in the world Inverse
- 15. In mobile robots the same configuration in terms of joint angles does not identify a unique
- 16. Actuator Control To get a particular robot actuator to a particular location it is important to
- 17. Robot Navigation Path planning addresses the task of computing a trajectory for the robot such that
- 18. Sensor-Driven Robot Control To accurately achieve a task in an intelligent environment, a robot has to
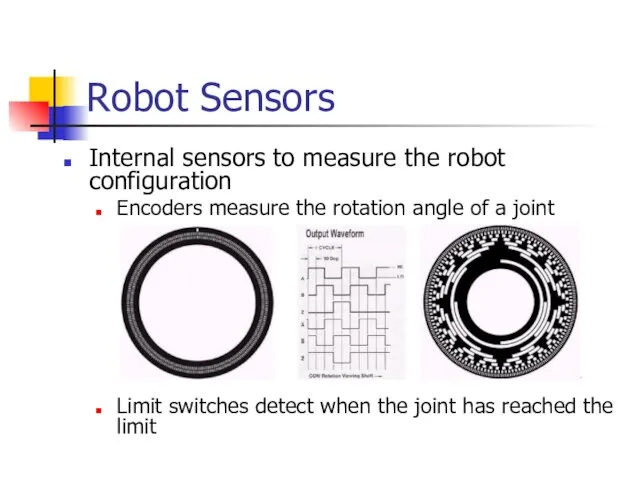
- 19. Robot Sensors Internal sensors to measure the robot configuration Encoders measure the rotation angle of a
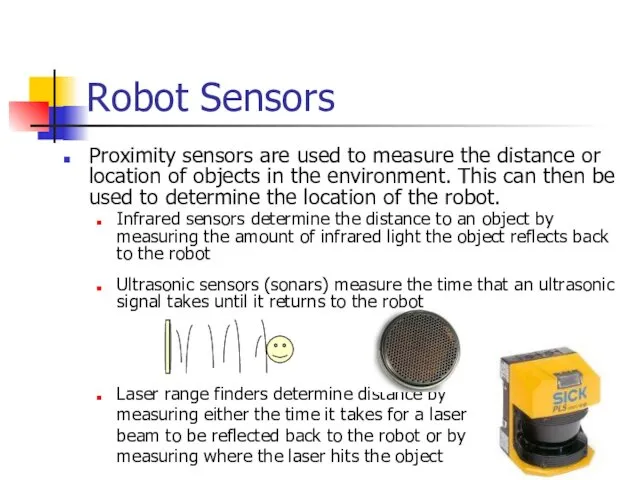
- 20. Robot Sensors Proximity sensors are used to measure the distance or location of objects in the
- 21. Computer Vision provides robots with the capability to passively observe the environment Stereo vision systems provide
- 22. Uncertainty in Robot Systems Robot systems in intelligent environments have to deal with sensor noise and
- 23. Probabilistic Robot Localization Explicit reasoning about Uncertainty using Bayes filters: Used for: Localization Mapping Model building
- 24. Deliberative Robot Control Architectures In a deliberative control architecture the robot first plans a solution for
- 25. Deliberative Control Architectures Advantages Reasons about contingencies Computes solutions to the given task Goal-directed strategies Problems
- 26. Behavior-Based Robot Control Architectures In a behavior-based control architecture the robot’s actions are determined by a
- 27. Behavior-Based Robot Control Architectures Reactive, behavior-based control combines relatively simple behaviors, each of which achieves a
- 28. Complex behavior can be achieved using very simple control mechanisms Braitenberg vehicles: differential drive mobile robots
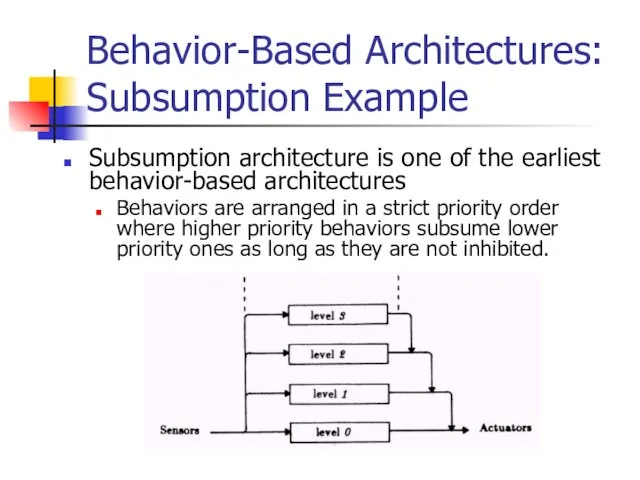
- 29. Behavior-Based Architectures: Subsumption Example Subsumption architecture is one of the earliest behavior-based architectures Behaviors are arranged
- 30. Subsumption Example A variety of tasks can be robustly performed from a small number of behavioral
- 31. Reactive, Behavior-Based Control Architectures Advantages Reacts fast to changes Does not rely on accurate models “The
- 32. Hybrid Control Architectures Hybrid architectures combine reactive control with abstract task planning Abstract task planning layer
- 33. Hybrid Control Policies Task Plan: Behavioral Strategy:
- 34. Example Task: Changing a Light Bulb
- 35. Hybrid Control Architectures Advantages Permits goal-based strategies Ensures fast reactions to unexpected changes Reduces complexity of
- 36. Traditional Human-Robot Interface: Teleoperation Remote Teleoperation: Direct operation of the robot by the user User uses
- 37. Human-Robot Interaction in Intelligent Environments Personal service robot Controlled and used by untrained users Intuitive, easy
- 38. Example: Minerva the Tour Guide Robot (CMU/Bonn) © CMU Robotics Institute http://www.cs.cmu.edu/~thrun/movies/minerva.mpg
- 39. Intuitive Robot Interfaces: Command Input Graphical programming interfaces Users construct policies form elemental blocks Problems: Requires
- 40. Intuitive Robot Interfaces: Robot-Human Interaction He robot has to be able to communicate its intentions to
- 41. Example: The Nursebot Project © CMU Robotics Institute http://www/cs/cmu.edu/~thrun/movies/pearl_assist.mpg
- 42. Human-Robot Interfaces Existing technologies Simple voice recognition and speech synthesis Gesture recognition systems On-screen, text-based interaction
- 43. Integration of Commands and Autonomous Operation Adjustable Autonomy The robot can operate at varying levels of
- 44. "Social" Robot Interactions To make robots acceptable to average users they should appear and behave “natural”
- 45. "Social" Robot Example: Kismet © MIT AI Lab http://www.ai.mit.edu/projects/cog/Video/kismet/kismet_face_30fps.mpg
- 46. "Social" Robot Interactions Advantages: Robots that look human and that show “emotions” can make interactions more
- 47. Human-Robot Interfaces for Intelligent Environments Robot Interfaces have to be easy to use Robots have to
- 48. Intelligent Environments are non-stationary and change frequently, requiring robots to adapt Adaptation to changes in the
- 49. Adaptation and Learning In Autonomous Robots Learning to interpret sensor information Recognizing objects in the environment
- 50. Learning Approaches for Robot Systems Supervised learning by teaching Robots can learn from direct feedback from
- 51. Learning Sensory Patterns Chair Learning to Identify Objects How can a particular object be recognized ?
- 52. Learning Task Strategies by Experimentation Autonomous robots have to be able to learn new tasks even
- 53. Example: Reinforcement Learning in a Hybrid Architecture Policy Acquisition Layer Learning tasks without supervision Abstract Plan
- 54. Example Task: Learning to Walk
- 55. Scaling Up: Learning Complex Tasks from Simpler Tasks Complex tasks are hard to learn since they
- 56. Example: Learning to Walk
- 58. Скачать презентацию
Motivation
Intelligent Environments are aimed at improving the inhabitants’ experience and task
Motivation
Intelligent Environments are aimed at improving the inhabitants’ experience and task
Automation and Robotics in Intelligent Environments
Control of the physical environment
Automated blinds
Thermostats
Automation and Robotics in Intelligent Environments
Control of the physical environment
Automated blinds
Thermostats
Robots
Robota (Czech) = A worker of forced labor
From Czech playwright Karel
Robots
Robota (Czech) = A worker of forced labor
From Czech playwright Karel
A Brief History of Robotics
Mechanical Automata
Ancient Greece & Egypt
Water powered
A Brief History of Robotics
Mechanical Automata
Ancient Greece & Egypt
Water powered
Robots
Robot Manipulators
Mobile Robots
Robots
Robot Manipulators
Mobile Robots
Robots
Walking Robots
Humanoid Robots
Robots
Walking Robots
Humanoid Robots
Autonomous Robots
The control of autonomous robots involves a number of subtasks
Understanding
Autonomous Robots
The control of autonomous robots involves a number of subtasks
Understanding
Traditional Industrial Robots
Traditional industrial robot control uses robot arms and largely
Traditional Industrial Robots
Traditional industrial robot control uses robot arms and largely
Problems
Traditional programming techniques for industrial robots lack key capabilities necessary
Problems
Traditional programming techniques for industrial robots lack key capabilities necessary
Requirements for Robots in Intelligent Environments
Autonomy
Robots have to be capable of
Requirements for Robots in Intelligent Environments
Autonomy
Robots have to be capable of

Robots for Intelligent Environments
Service Robots
Security guard
Delivery
Cleaning
Mowing
Assistance Robots
Mobility
Services for elderly and
People
Robots for Intelligent Environments
Service Robots
Security guard
Delivery
Cleaning
Mowing
Assistance Robots
Mobility
Services for elderly and
People
Autonomous Robot Control
To control robots to perform tasks autonomously a number
Autonomous Robot Control
To control robots to perform tasks autonomously a number
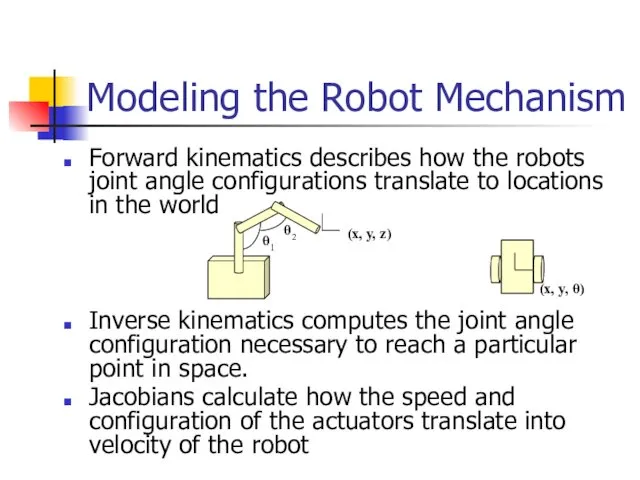
Forward kinematics describes how the robots joint angle configurations translate to
Forward kinematics describes how the robots joint angle configurations translate to
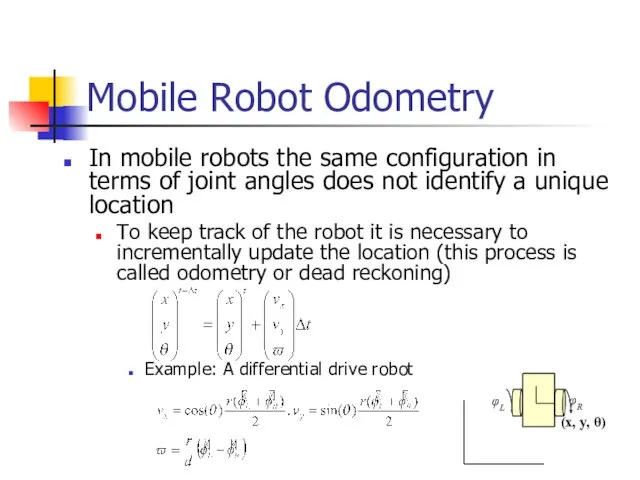
In mobile robots the same configuration in terms of joint angles
In mobile robots the same configuration in terms of joint angles
Actuator Control
To get a particular robot actuator to a particular location
Actuator Control
To get a particular robot actuator to a particular location
Robot Navigation
Path planning addresses the task of computing a trajectory for
Robot Navigation
Path planning addresses the task of computing a trajectory for
Sensor-Driven Robot Control
To accurately achieve a task in an intelligent environment,
Sensor-Driven Robot Control
To accurately achieve a task in an intelligent environment,
Robot Sensors
Internal sensors to measure the robot configuration
Encoders measure the rotation
Robot Sensors
Internal sensors to measure the robot configuration
Encoders measure the rotation
Robot Sensors
Proximity sensors are used to measure the distance or location
Robot Sensors
Proximity sensors are used to measure the distance or location
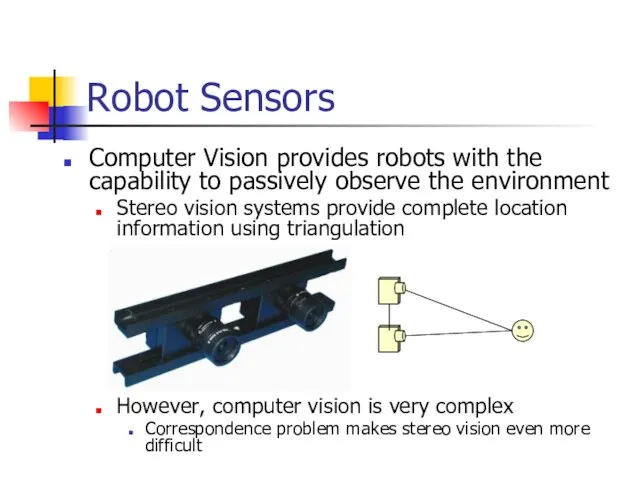
Computer Vision provides robots with the capability to passively observe the
Computer Vision provides robots with the capability to passively observe the
Uncertainty in Robot Systems
Robot systems in intelligent environments have to deal
Uncertainty in Robot Systems
Robot systems in intelligent environments have to deal
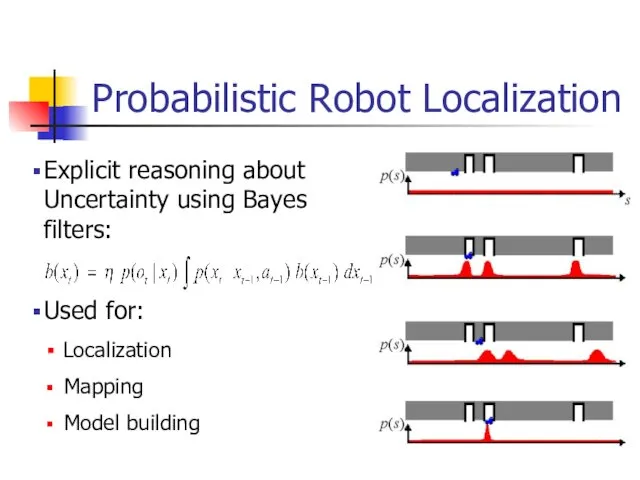
Probabilistic Robot Localization
Explicit reasoning about Uncertainty using Bayes filters:
Used for:
Localization
Probabilistic Robot Localization
Explicit reasoning about Uncertainty using Bayes filters:
Used for:
Localization
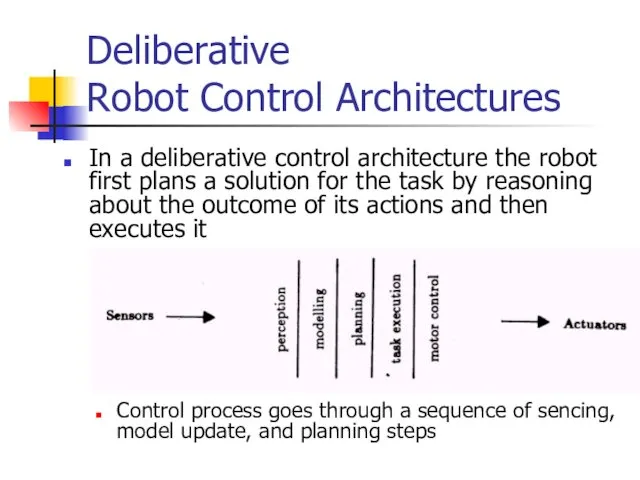
Deliberative
Robot Control Architectures
In a deliberative control architecture the robot first
Deliberative
Robot Control Architectures
In a deliberative control architecture the robot first
Deliberative
Control Architectures
Advantages
Reasons about contingencies
Computes solutions to the given task
Goal-directed strategies
Problems
Solutions
Deliberative
Control Architectures
Advantages
Reasons about contingencies
Computes solutions to the given task
Goal-directed strategies
Problems
Solutions
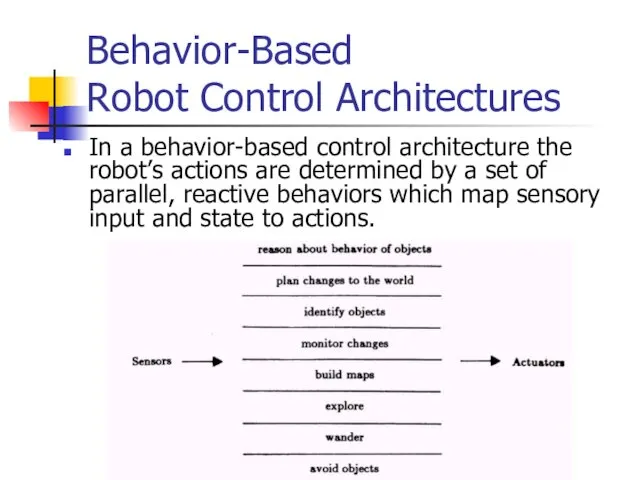
Behavior-Based
Robot Control Architectures
In a behavior-based control architecture the robot’s actions are
Behavior-Based
Robot Control Architectures
In a behavior-based control architecture the robot’s actions are
Behavior-Based
Robot Control Architectures
Reactive, behavior-based control combines relatively simple behaviors, each of
Behavior-Based
Robot Control Architectures
Reactive, behavior-based control combines relatively simple behaviors, each of
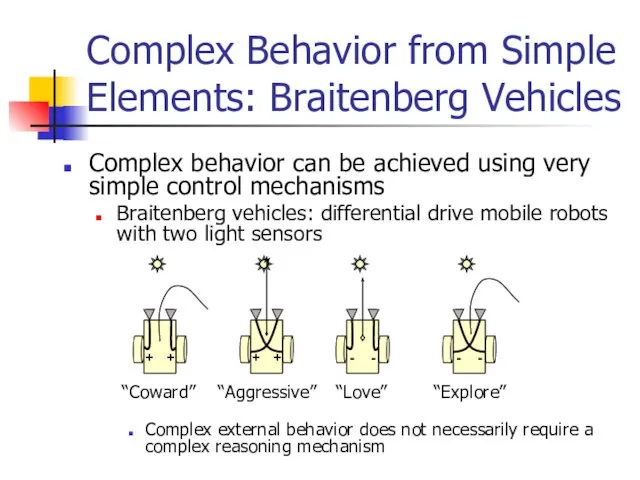
Complex behavior can be achieved using very simple control mechanisms
Braitenberg vehicles:
Complex behavior can be achieved using very simple control mechanisms
Braitenberg vehicles:
Behavior-Based Architectures: Subsumption Example
Subsumption architecture is one of the earliest behavior-based
Behavior-Based Architectures: Subsumption Example
Subsumption architecture is one of the earliest behavior-based
Subsumption Example
A variety of tasks can be robustly performed from a
Subsumption Example
A variety of tasks can be robustly performed from a
Reactive, Behavior-Based
Control Architectures
Advantages
Reacts fast to changes
Does not rely on accurate
Reactive, Behavior-Based
Control Architectures
Advantages
Reacts fast to changes
Does not rely on accurate
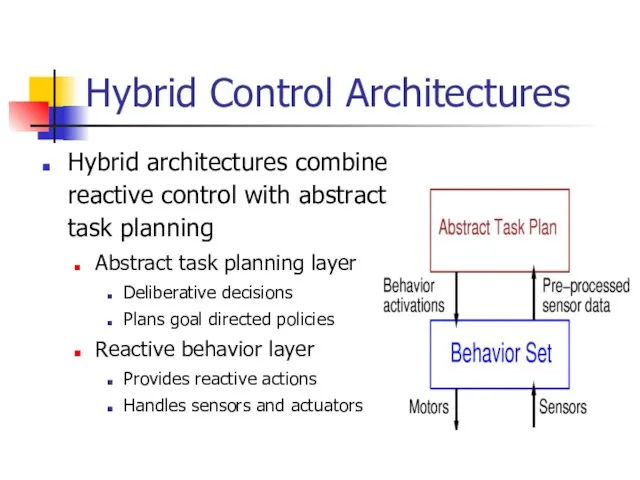
Hybrid Control Architectures
Hybrid architectures combine reactive control with abstract task planning
Abstract
Hybrid Control Architectures
Hybrid architectures combine reactive control with abstract task planning
Abstract
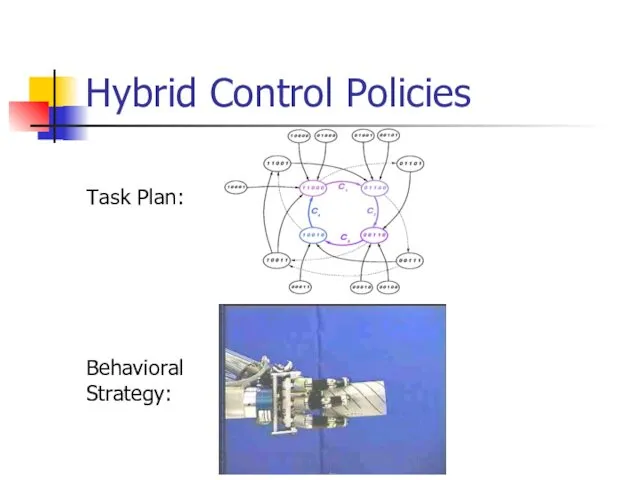
Hybrid Control Policies
Task Plan:
Behavioral
Strategy:
Hybrid Control Policies
Task Plan:
Behavioral
Strategy:
Example Task:
Changing a Light Bulb
Example Task:
Changing a Light Bulb
Hybrid Control Architectures
Advantages
Permits goal-based strategies
Ensures fast reactions to unexpected changes
Reduces complexity
Hybrid Control Architectures
Advantages
Permits goal-based strategies
Ensures fast reactions to unexpected changes
Reduces complexity

Traditional Human-Robot Interface: Teleoperation
Remote Teleoperation: Direct operation of the robot by
Traditional Human-Robot Interface: Teleoperation
Remote Teleoperation: Direct operation of the robot by
Human-Robot Interaction in Intelligent Environments
Personal service robot
Controlled and used by untrained
Human-Robot Interaction in Intelligent Environments
Personal service robot
Controlled and used by untrained
Example: Minerva the Tour Guide Robot (CMU/Bonn)
© CMU Robotics Institute
http://www.cs.cmu.edu/~thrun/movies/minerva.mpg
Example: Minerva the Tour Guide Robot (CMU/Bonn)
© CMU Robotics Institute
http://www.cs.cmu.edu/~thrun/movies/minerva.mpg
Intuitive Robot Interfaces:
Command Input
Graphical programming interfaces
Users construct policies form elemental blocks
Problems:
Requires
Intuitive Robot Interfaces:
Command Input
Graphical programming interfaces
Users construct policies form elemental blocks
Problems:
Requires
Intuitive Robot Interfaces:
Robot-Human Interaction
He robot has to be able to communicate
Intuitive Robot Interfaces:
Robot-Human Interaction
He robot has to be able to communicate
Example: The Nursebot Project
© CMU Robotics Institute
http://www/cs/cmu.edu/~thrun/movies/pearl_assist.mpg
Example: The Nursebot Project
© CMU Robotics Institute
http://www/cs/cmu.edu/~thrun/movies/pearl_assist.mpg
Human-Robot Interfaces
Existing technologies
Simple voice recognition and speech synthesis
Gesture recognition systems
On-screen, text-based
Human-Robot Interfaces
Existing technologies
Simple voice recognition and speech synthesis
Gesture recognition systems
On-screen, text-based

Integration of Commands and Autonomous Operation
Adjustable Autonomy
The robot can operate at
Integration of Commands and Autonomous Operation
Adjustable Autonomy
The robot can operate at
"Social" Robot Interactions
To make robots acceptable to average users they should
"Social" Robot Interactions
To make robots acceptable to average users they should
"Social" Robot Example: Kismet
© MIT AI Lab
http://www.ai.mit.edu/projects/cog/Video/kismet/kismet_face_30fps.mpg
"Social" Robot Example: Kismet
© MIT AI Lab
http://www.ai.mit.edu/projects/cog/Video/kismet/kismet_face_30fps.mpg
"Social" Robot Interactions
Advantages:
Robots that look human and that show “emotions”
"Social" Robot Interactions
Advantages:
Robots that look human and that show “emotions”
Human-Robot Interfaces for Intelligent Environments
Robot Interfaces have to be easy to
Human-Robot Interfaces for Intelligent Environments
Robot Interfaces have to be easy to
Intelligent Environments are non-stationary and change frequently, requiring robots to adapt
Adaptation
Intelligent Environments are non-stationary and change frequently, requiring robots to adapt
Adaptation
Adaptation and Learning
In Autonomous Robots
Learning to interpret sensor information
Recognizing objects in
Adaptation and Learning
In Autonomous Robots
Learning to interpret sensor information
Recognizing objects in
Learning Approaches for Robot Systems
Supervised learning by teaching
Robots can
Learning Approaches for Robot Systems
Supervised learning by teaching
Robots can
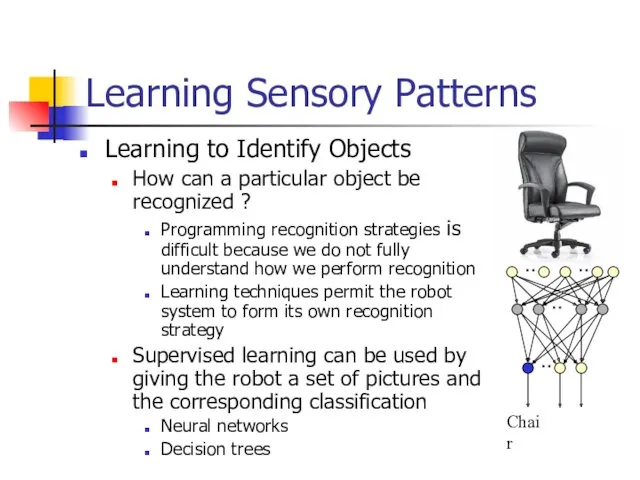
Learning Sensory Patterns
Chair
Learning to Identify Objects
How can a particular object be
Learning Sensory Patterns
Chair
Learning to Identify Objects
How can a particular object be
Learning Task Strategies by Experimentation
Autonomous robots have to be able to
Learning Task Strategies by Experimentation
Autonomous robots have to be able to
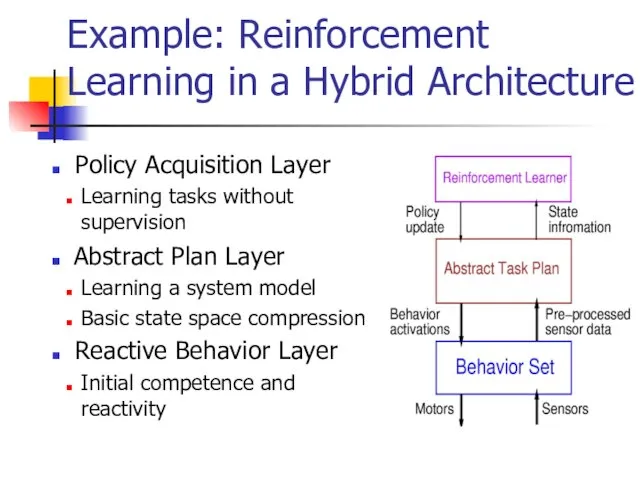
Example: Reinforcement Learning in a Hybrid Architecture
Policy Acquisition Layer
Learning
Example: Reinforcement Learning in a Hybrid Architecture
Policy Acquisition Layer
Learning
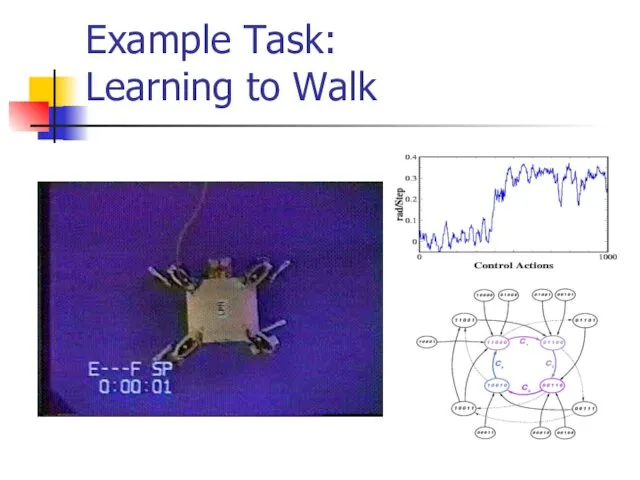
Example Task:
Learning to Walk
Example Task:
Learning to Walk
Scaling Up: Learning Complex Tasks from Simpler Tasks
Complex tasks are hard
Scaling Up: Learning Complex Tasks from Simpler Tasks
Complex tasks are hard
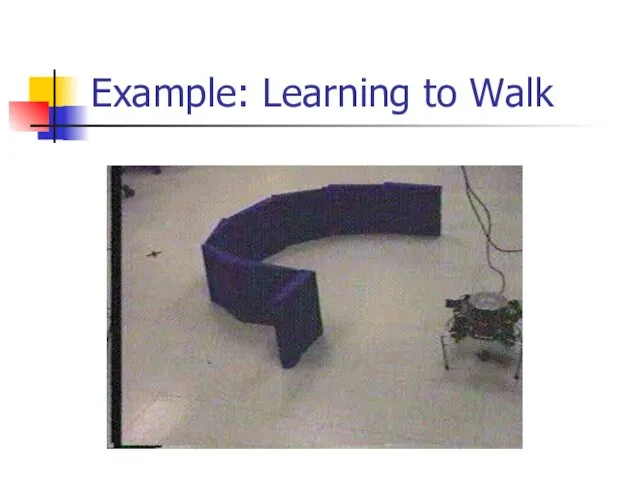
Example: Learning to Walk
Example: Learning to Walk
 Подходы к измерению информации
Подходы к измерению информации Social Media
Social Media Запись числа в различных системах счисления. ОГЭ - 3 (N10)
Запись числа в различных системах счисления. ОГЭ - 3 (N10) Технології програмування КС. Лекція 2 (частина 2)
Технології програмування КС. Лекція 2 (частина 2) Модульное программирование
Модульное программирование Процессорные инструкции
Процессорные инструкции 11 класс. Базы данных
11 класс. Базы данных Модели и моделирование
Модели и моделирование Операционные системы. Управление памятью
Операционные системы. Управление памятью Учимся создавать презентации
Учимся создавать презентации Киберпреступность и кибертерроризм
Киберпреступность и кибертерроризм Тип данных. Запись. (Лекция 9)
Тип данных. Запись. (Лекция 9) Анализ затрат на информационное обеспечение деятельности компании
Анализ затрат на информационное обеспечение деятельности компании Создание Web-страниц с помощью html-кода
Создание Web-страниц с помощью html-кода Рядки в Java
Рядки в Java Технологии системного анализа
Технологии системного анализа Скорость передачи информации и пропускная способность каналов связи
Скорость передачи информации и пропускная способность каналов связи SCADA-системы
SCADA-системы Функціональна структура типової інформаційної системи для потреб оцінювання
Функціональна структура типової інформаційної системи для потреб оцінювання Digital-стратегия продвижения ГК SportCourt
Digital-стратегия продвижения ГК SportCourt Сетевое сообщество учителей
Сетевое сообщество учителей Пакет офисных приложений MS Office
Пакет офисных приложений MS Office Основы социальной информатики. Информационная безопасность
Основы социальной информатики. Информационная безопасность Работа с Joomla
Работа с Joomla Презентация к уроку по учету трат_1
Презентация к уроку по учету трат_1 Adaptive libraries for multicore architectures with explicitly-managed memory hierarchies
Adaptive libraries for multicore architectures with explicitly-managed memory hierarchies Объекты ядра Windows
Объекты ядра Windows Сетевая этика. Культура общения в сети
Сетевая этика. Культура общения в сети