- Соревнование Следование по линии

Содержание
- 2. Задача робота: Двигаясь по линии, пройти полный круг по линии соревновательного поля за минимальное время При
- 3. Требования к роботу Длина – не более 40 см; Ширина – не более 40 см; Высота
- 4. Lego EV3, датчики света подключены к портам 1 и 2. Модель робота – 2D модель Для
- 5. Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального регулирования, которые мы уже изучили
- 6. Какой тип программы применить на роботе – выбирать Вам на основе эмпирических данных, полученных при тестировании
- 8. Скачать презентацию
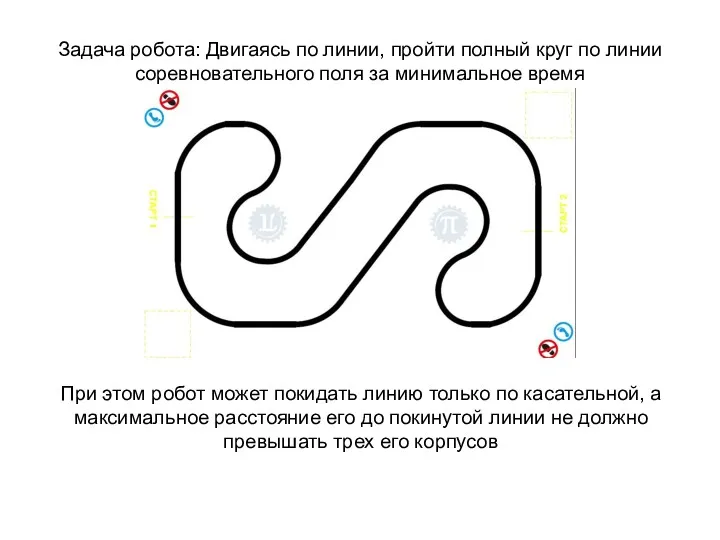
Задача робота: Двигаясь по линии, пройти полный круг по линии соревновательного
Задача робота: Двигаясь по линии, пройти полный круг по линии соревновательного
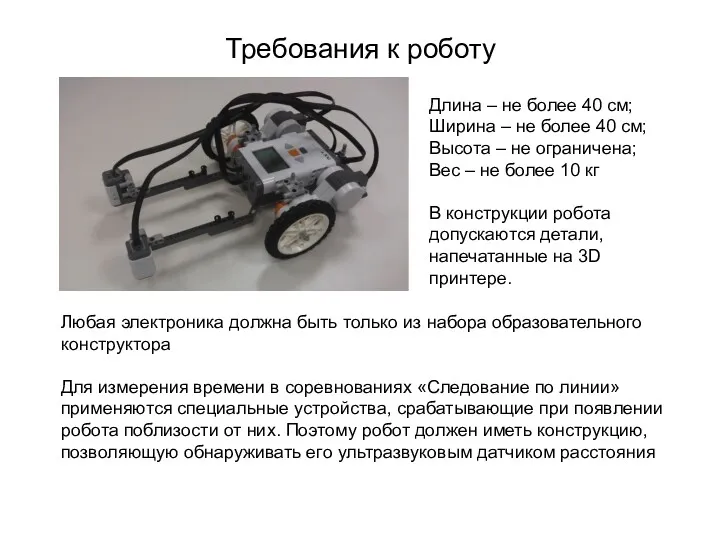
Требования к роботу
Длина – не более 40 см;
Ширина – не более
Требования к роботу
Длина – не более 40 см;
Ширина – не более
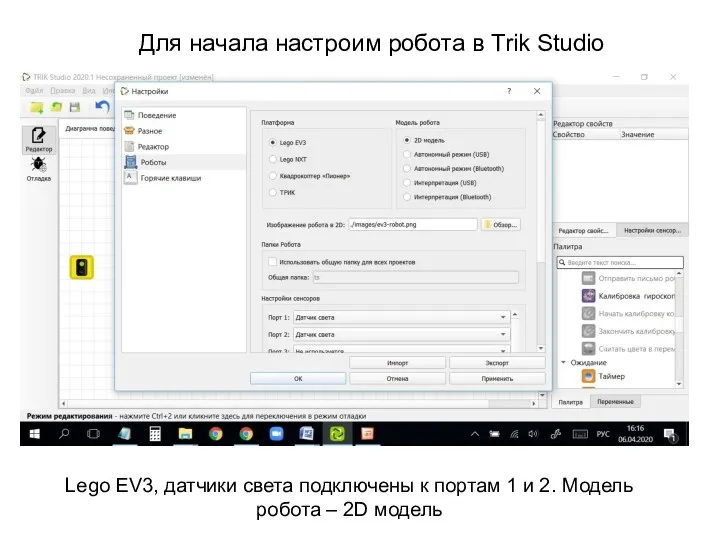
Lego EV3, датчики света подключены к портам 1 и 2. Модель
Lego EV3, датчики света подключены к портам 1 и 2. Модель
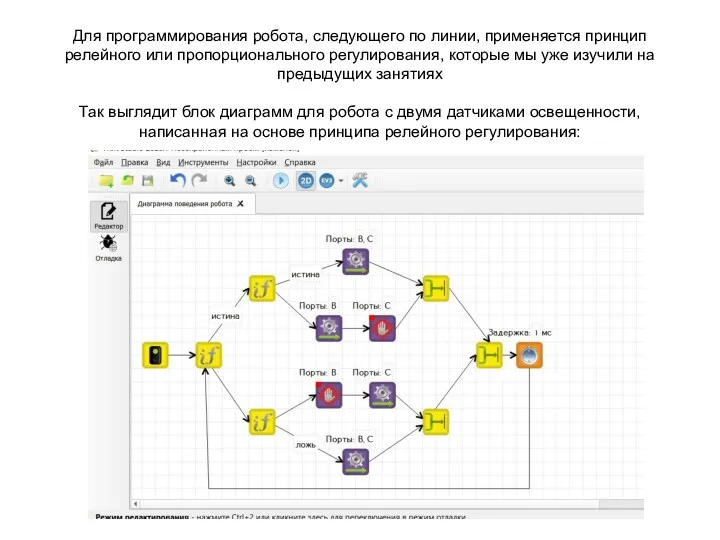
Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального
Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального
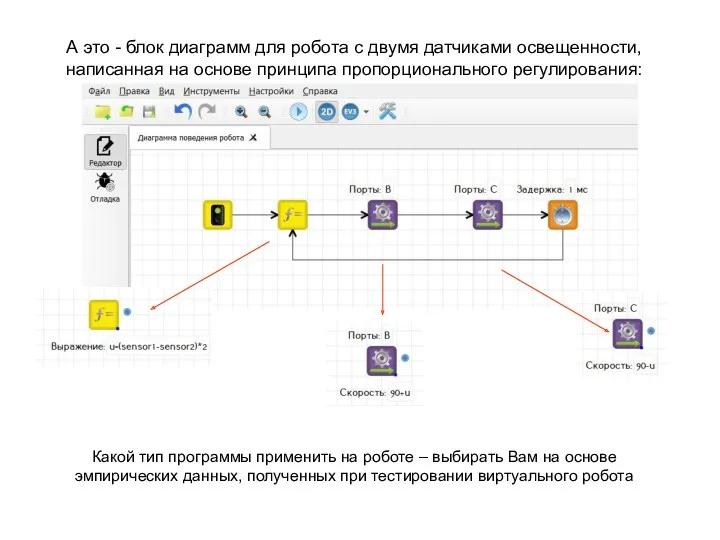
Какой тип программы применить на роботе – выбирать Вам на основе
Какой тип программы применить на роботе – выбирать Вам на основе
 Labor Dynamics of the IT Economy. What IT Planners Need to Know about the Nature of Programming
Labor Dynamics of the IT Economy. What IT Planners Need to Know about the Nature of Programming Признаки объектов
Признаки объектов Обработка информации. Получение новой информации. 5 класс.
Обработка информации. Получение новой информации. 5 класс. Количественные параметры информационных объектов
Количественные параметры информационных объектов Поколения ЭВМ
Поколения ЭВМ Относительные, абсолютные и смешанные ссылки. 9 класс
Относительные, абсолютные и смешанные ссылки. 9 класс Условия и циклы языка ABAP
Условия и циклы языка ABAP Авантелеком - Цифровая платформа управления коммуникациями для государственных и муниципальных унитарных предприятий
Авантелеком - Цифровая платформа управления коммуникациями для государственных и муниципальных унитарных предприятий Путешествие в страну Инфознайка
Путешествие в страну Инфознайка Virtual reality
Virtual reality Презентация СAD-CAM-CAE-системы-назначение, виды, история
Презентация СAD-CAM-CAE-системы-назначение, виды, история Урок информатики Виды компьютерной графики
Урок информатики Виды компьютерной графики Развитие вычислительной техники и архитектура
Развитие вычислительной техники и архитектура CSS. Источники информации. Подключение CSS к HTML. Таблицы стилей для различных устройств просмотра. Селекторы и комбинаторы
CSS. Источники информации. Подключение CSS к HTML. Таблицы стилей для различных устройств просмотра. Селекторы и комбинаторы Моделирование на UML. Определение UML. Лекция 1
Моделирование на UML. Определение UML. Лекция 1 Программирование на языке Паскаль. Ветвления
Программирование на языке Паскаль. Ветвления Архивы, библиотеки, музеи в глобальной информационной среде
Архивы, библиотеки, музеи в глобальной информационной среде Развитие пошаговых стратегий
Развитие пошаговых стратегий Синхронизация. Критические секции (Critical section)
Синхронизация. Критические секции (Critical section) Разработка технологических карт уроков
Разработка технологических карт уроков Информационно - коммуникативные технологии в современной начальной школе.Презентация.
Информационно - коммуникативные технологии в современной начальной школе.Презентация. Базові засоби розробки і оформлення програм на мові Pascal
Базові засоби розробки і оформлення програм на мові Pascal Теоретические основы монтажа. Создание проекта в Adobe Premiere Pro
Теоретические основы монтажа. Создание проекта в Adobe Premiere Pro Основы программирования на Python
Основы программирования на Python Умный дом. Преимущества и возможности
Умный дом. Преимущества и возможности Решение задач. Basic
Решение задач. Basic Понятие информационного метода. Понятие информационного процесса
Понятие информационного метода. Понятие информационного процесса Principles of Testing
Principles of Testing