- Создание автономного комплекса Умный дом

Содержание
- 2. Ознакомление со средой программирования Ardublock. Её преимущества над S4A У s4a, в котором мы уже успели
- 3. К счастью, для начинающих существует среда графического программирования Ardublock. Она особенна интересна и полезна при обучении
- 4. Главное окно Ardublock
- 5. группа Управление Является полным аналогом цикла «Всегда» S4A, внутри которого располагается последовательность действий, которая будет выполняться
- 6. Не имеет прямого аналога в S4A, но соответствует логике работы в Arduino IDE. При этом в
- 7. Внутри этого блока располагается последовательность действий, которые выполняются, если выполняется условие. При этом условие содержится в
- 8. Расширеное условие, отличается от предыдущего тем, что в нем можно указать не только команды, которые выполнятся
- 9. Цикл с условием, в котором команды выполняются до тех пор, пока условие истинно. Если условие ложно,
- 10. Также цикл с условием, но отмена предыдущего заключается в том, что условие проверяется не до выполнения
- 11. Цикл со счетчиком, в котором внутренние команды повторяются заданную в цикле количество раз.
- 12. Значение датчика, подключенного к заданному дискретному (цифровому) входу. Может принимать значения 1 и 0 (HIGH и
- 13. Значение датчика, подключенного к заданному аналоговому входу (может принимать значения от 0 до 1023).
- 14. Передает на заданный цифровой выход значение HIGH или LOW (1 или 0).
- 15. Передает на заданный аналоговый выход значения от 0 до 255.
- 16. Возвращает серводвигатель, подключенный к заданному порту на заданный угол.
- 17. Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена для получения данных из стандартного
- 18. Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена для генерации звукового сигнала заданной
- 19. Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена для генерации звукового сигнала заданной
- 20. Отключает генерацию звука на выбранном порту
- 21. Группа Математические операторы Ardublock включает в себя как простые математические операции, существующие в S4A в группе
- 22. Останавливают выполнение программы на заданное количество молей (одна тысячная часть) или микро (одна миллионная часть) секунд
- 23. Термистор - это резистор, сопротивление которого изменяется от температуры. Термисторы бывают двух типов: с положительным и
- 24. Сервопривод (серводвигатель или сервомотор) - это разновидность мотора, для которого можно легко задавать угол поворота оси.
- 25. Бесконтактный датчик YL-63 обнаруживает объекты в диапазоне расстояний почти от нуля и до установленного предела не
- 26. Данный модуль является блоком реле, который с помощью напряжения 5В может коммутировать до 10А 30V DC
- 27. При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения
- 28. Датчик газа (рисунок 15.1), построенный на базе газоанализатора MQ-2 и позволяет выявить наличие в окружающем воздухе
- 29. Подключение датчиков, необходимых для работы
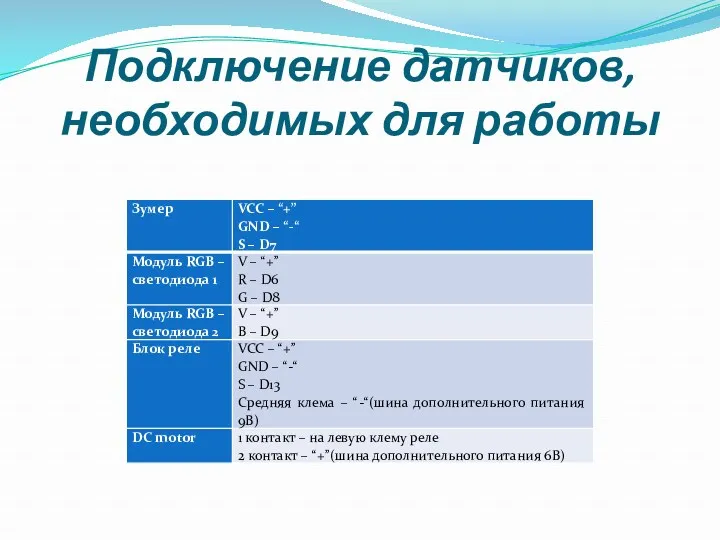
- 30. Подключение датчиков, необходимых для работы
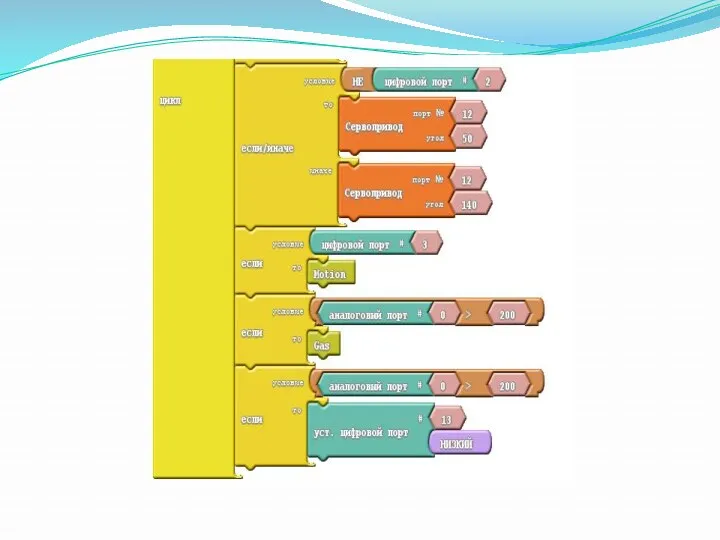
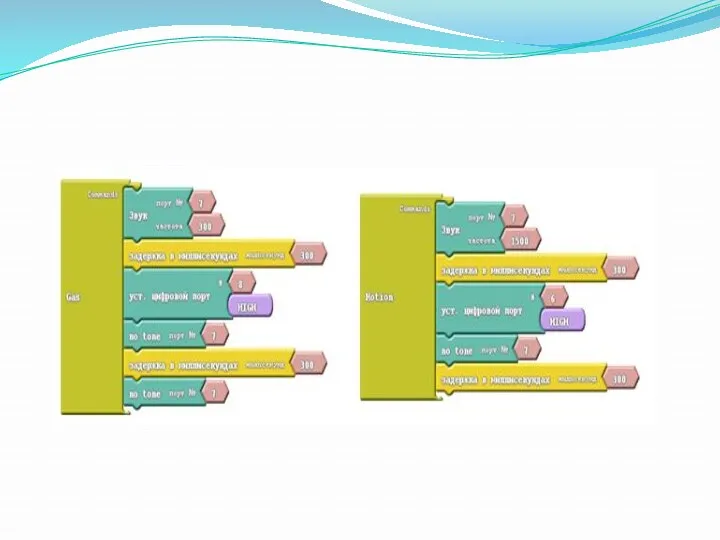
- 31. Составление программы
- 34. Урок №2 Битва автономных роботов
- 35. Ознакомление с основами робототехники Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах
- 36. Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока.
- 37. Для работы с Arduino есть специальные модули джойстиков ,они имеют ось X, Y и кнопку, которую
- 38. Правила проведения соревнований Первым этапом будут соревнования 1х1 с последовательным до 2-х побед по формату single
- 39. Подключение
- 40. Подбор оптимальных углов для моторов
- 41. Основная программа будет иметь следующий вид
- 43. Скачать презентацию
Ознакомление со средой программирования Ardublock. Её преимущества над S4A
У s4a,
Ознакомление со средой программирования Ardublock. Её преимущества над S4A
У s4a,
К счастью, для начинающих существует среда графического программирования Ardublock. Она особенна
К счастью, для начинающих существует среда графического программирования Ardublock. Она особенна
Главное окно Ardublock
Главное окно Ardublock

группа Управление
Является полным аналогом цикла «Всегда» S4A, внутри которого располагается последовательность
группа Управление
Является полным аналогом цикла «Всегда» S4A, внутри которого располагается последовательность
Не имеет прямого аналога в S4A, но соответствует логике работы в
Не имеет прямого аналога в S4A, но соответствует логике работы в

Внутри этого блока располагается последовательность действий, которые выполняются, если выполняется условие.
Внутри этого блока располагается последовательность действий, которые выполняются, если выполняется условие.
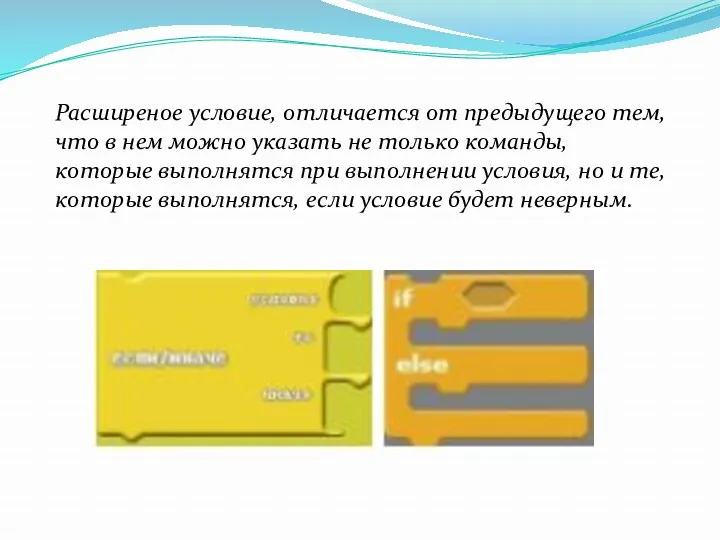
Расширеное условие, отличается от предыдущего тем, что в нем можно указать
Расширеное условие, отличается от предыдущего тем, что в нем можно указать
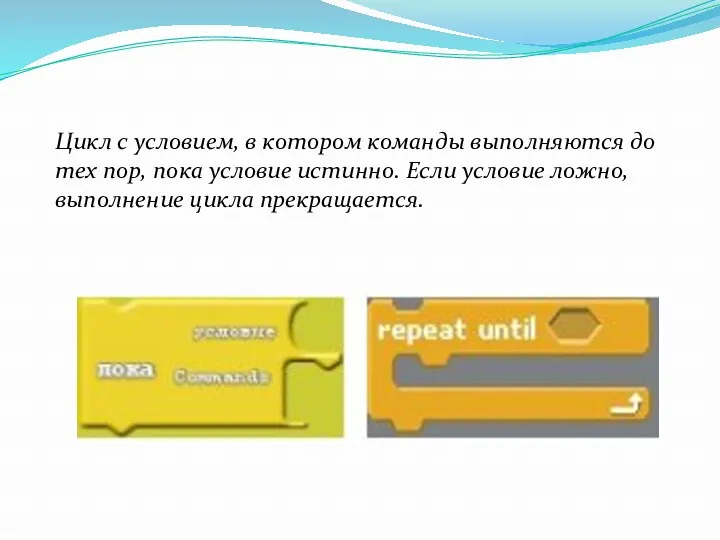
Цикл с условием, в котором команды выполняются до тех пор, пока
Цикл с условием, в котором команды выполняются до тех пор, пока
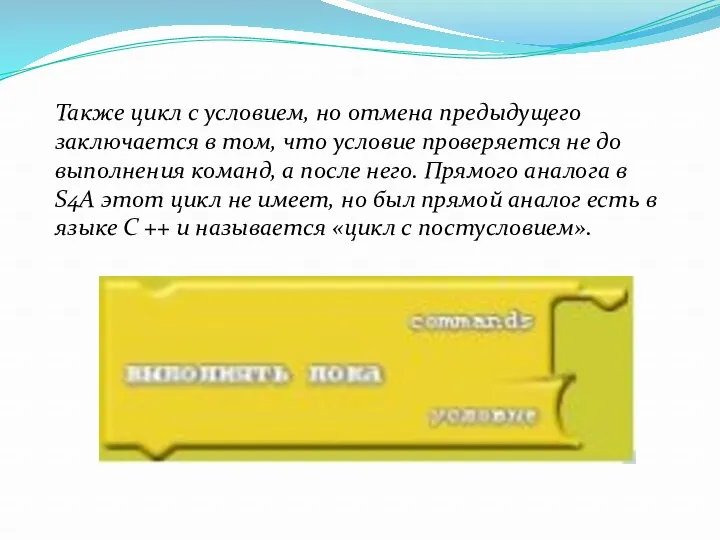
Также цикл с условием, но отмена предыдущего заключается в том, что
Также цикл с условием, но отмена предыдущего заключается в том, что

Цикл со счетчиком, в котором внутренние команды повторяются заданную в цикле
Цикл со счетчиком, в котором внутренние команды повторяются заданную в цикле
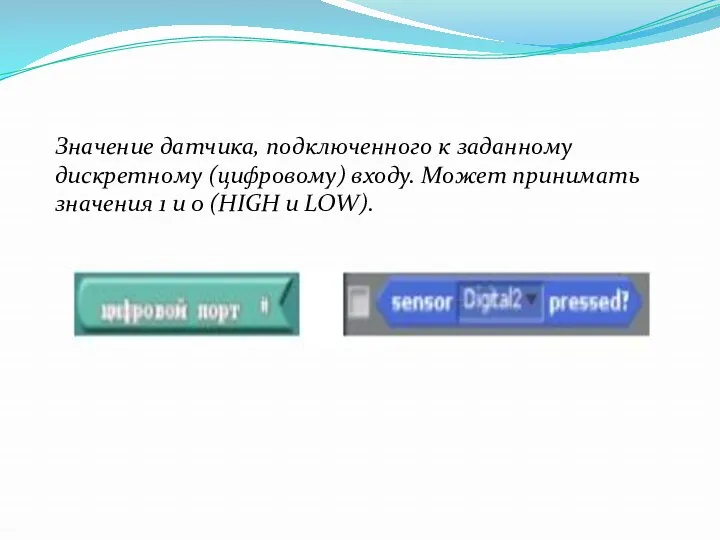
Значение датчика, подключенного к заданному дискретному (цифровому) входу. Может принимать значения
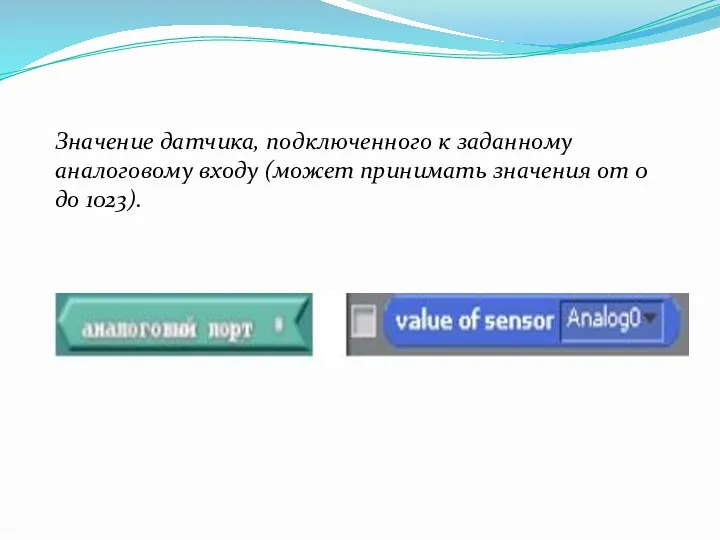
Значение датчика, подключенного к заданному аналоговому входу (может принимать значения от
Значение датчика, подключенного к заданному аналоговому входу (может принимать значения от
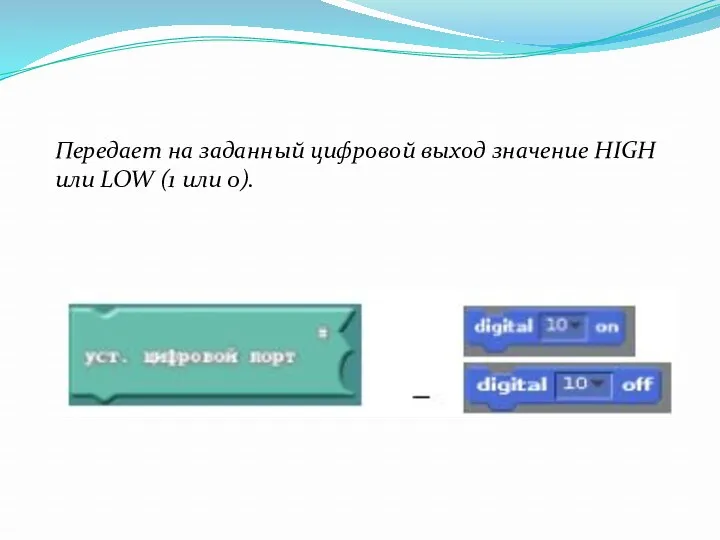
Передает на заданный цифровой выход значение HIGH или LOW (1 или
Передает на заданный цифровой выход значение HIGH или LOW (1 или
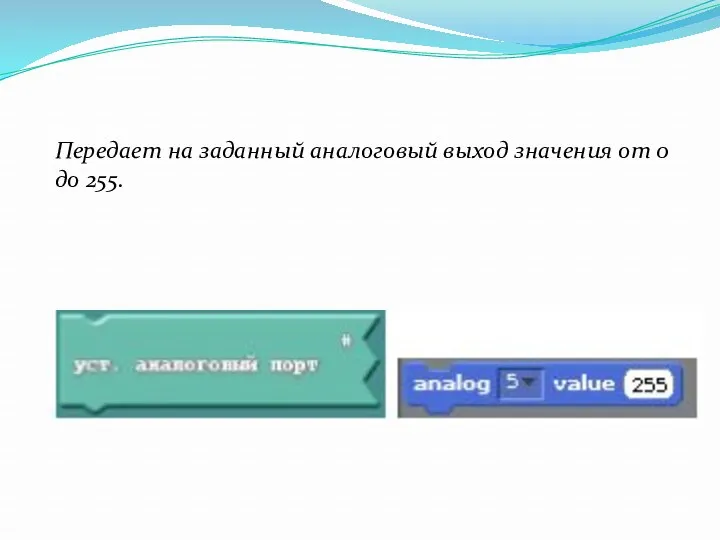
Передает на заданный аналоговый выход значения от 0 до 255.
Передает на заданный аналоговый выход значения от 0 до 255.
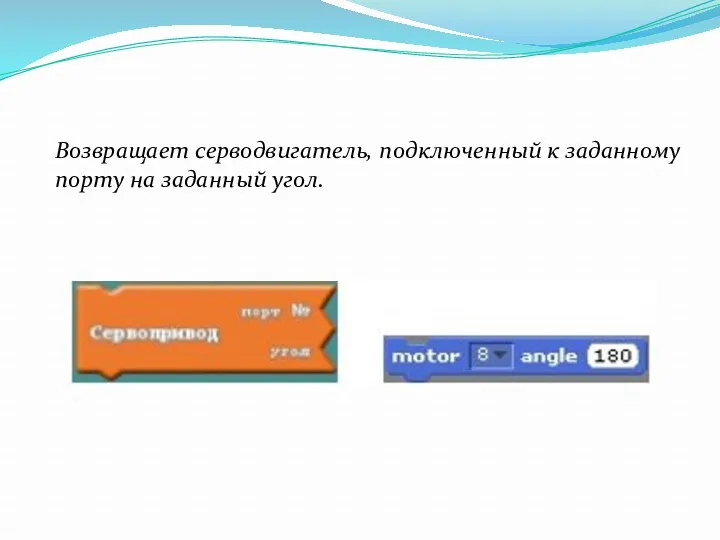
Возвращает серводвигатель, подключенный к заданному порту на заданный угол.
Возвращает серводвигатель, подключенный к заданному порту на заданный угол.
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Не имеет прямого аналога в S4A из-за ограничений последнего и предназначена
Отключает генерацию звука на выбранном порту
Отключает генерацию звука на выбранном порту
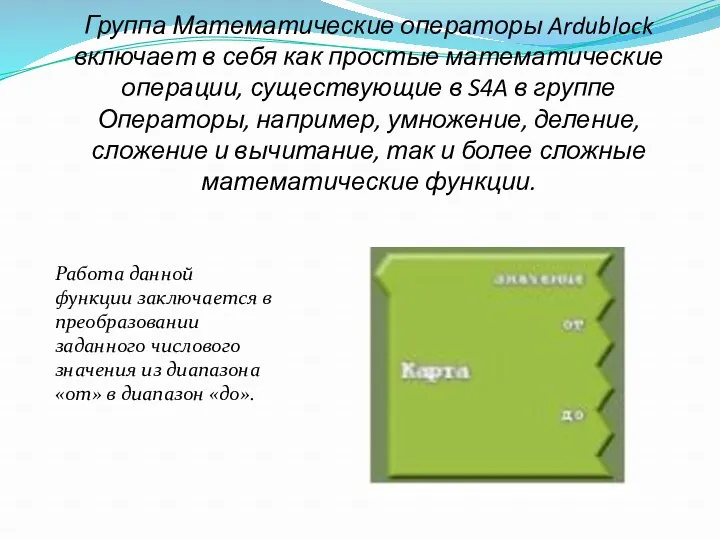
Группа Математические операторы Ardublock включает в себя как простые математические операции,
Группа Математические операторы Ardublock включает в себя как простые математические операции,
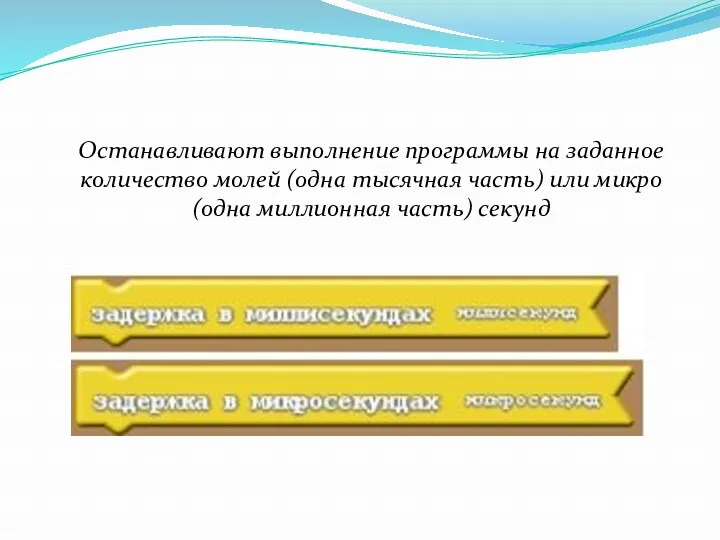
Останавливают выполнение программы на заданное количество молей (одна тысячная часть) или
Останавливают выполнение программы на заданное количество молей (одна тысячная часть) или

Термистор - это резистор, сопротивление которого изменяется от температуры.
Термисторы бывают двух
Термистор - это резистор, сопротивление которого изменяется от температуры.
Термисторы бывают двух
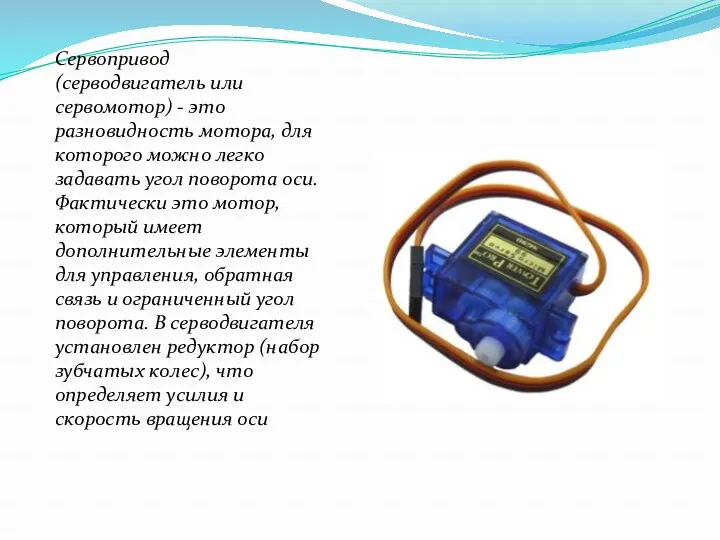
Сервопривод (серводвигатель или сервомотор) - это разновидность мотора, для которого можно
Сервопривод (серводвигатель или сервомотор) - это разновидность мотора, для которого можно

Бесконтактный датчик YL-63 обнаруживает объекты в диапазоне расстояний почти от нуля
Бесконтактный датчик YL-63 обнаруживает объекты в диапазоне расстояний почти от нуля

Данный модуль является блоком реле, который с помощью напряжения 5В может
Данный модуль является блоком реле, который с помощью напряжения 5В может
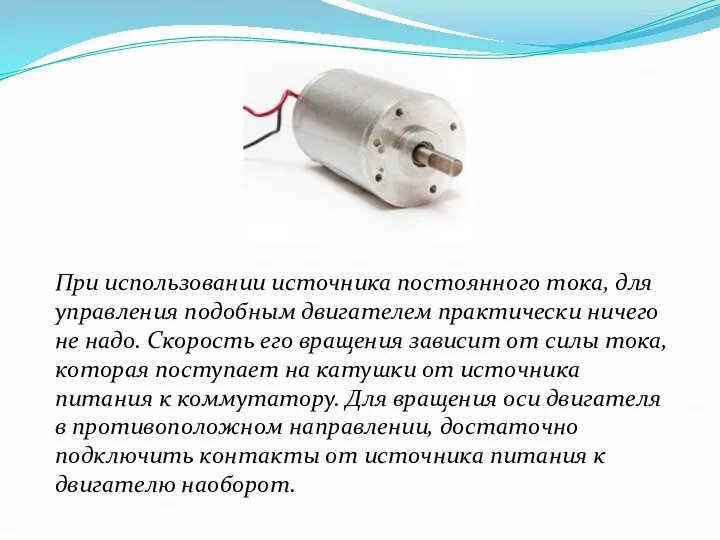
При использовании источника постоянного тока, для управления подобным двигателем практически ничего
При использовании источника постоянного тока, для управления подобным двигателем практически ничего

Датчик газа (рисунок 15.1), построенный на базе газоанализатора MQ-2 и позволяет
Датчик газа (рисунок 15.1), построенный на базе газоанализатора MQ-2 и позволяет
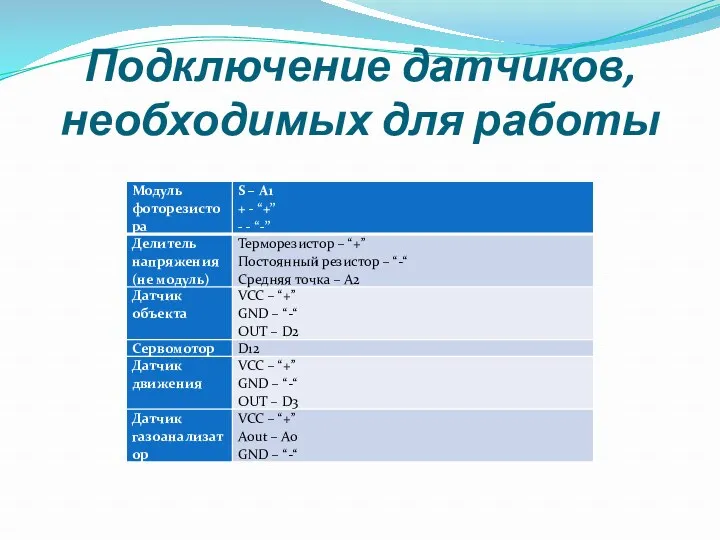
Подключение датчиков, необходимых для работы
Подключение датчиков, необходимых для работы
Подключение датчиков, необходимых для работы
Подключение датчиков, необходимых для работы

Составление программы
Составление программы
Урок №2
Битва автономных роботов
Урок №2
Битва автономных роботов
Ознакомление с основами робототехники
Приводы: это «мышцы» роботов. В настоящее время самыми популярными
Ознакомление с основами робототехники
Приводы: это «мышцы» роботов. В настоящее время самыми популярными
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно,
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно,
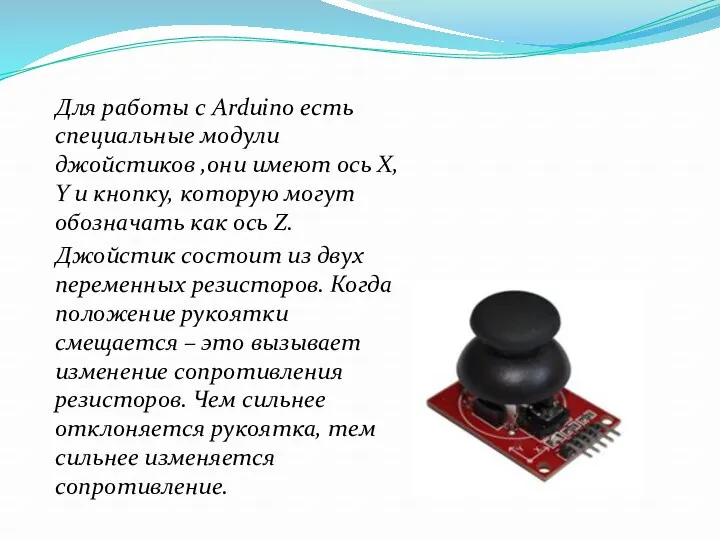
Для работы с Arduino есть специальные модули джойстиков ,они имеют ось
Для работы с Arduino есть специальные модули джойстиков ,они имеют ось
Правила проведения соревнований
Первым этапом будут соревнования 1х1 с последовательным до 2-х
Правила проведения соревнований
Первым этапом будут соревнования 1х1 с последовательным до 2-х
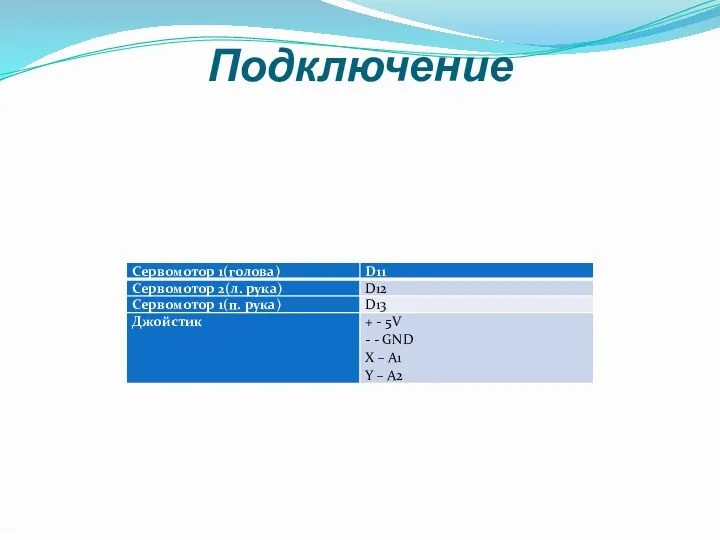
Подключение
Подключение

Подбор оптимальных углов для моторов
Подбор оптимальных углов для моторов
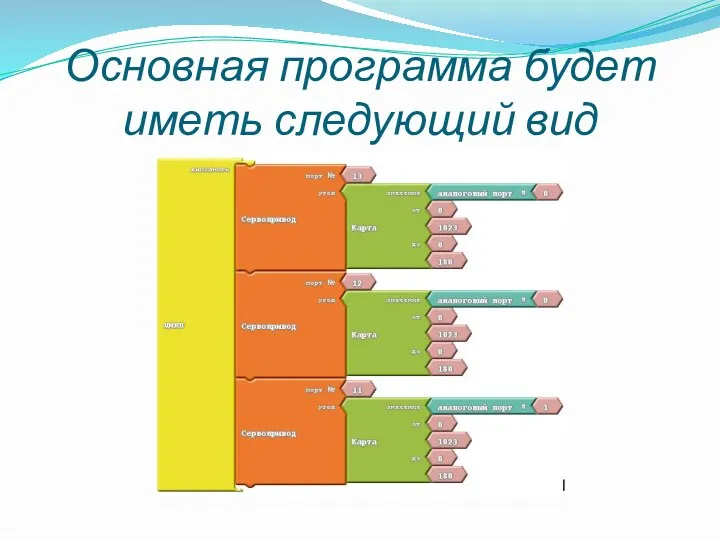
Основная программа будет иметь следующий вид
Основная программа будет иметь следующий вид
 Представление об информационной системе
Представление об информационной системе Решение логических задач
Решение логических задач Организация глобальных сетей
Организация глобальных сетей Представление и обработка чисел в компьютере
Представление и обработка чисел в компьютере Криптография, криптология, криптоанализ
Криптография, криптология, криптоанализ Вставка гиперссылок для управления презентацией в среде программы MS PowerPoint 2010
Вставка гиперссылок для управления презентацией в среде программы MS PowerPoint 2010 Введение в искусственный интеллект
Введение в искусственный интеллект Цифровые сервисы для университета будущего
Цифровые сервисы для университета будущего Параллельное программирование для ресурсоёмких задач численного моделирования в физике
Параллельное программирование для ресурсоёмких задач численного моделирования в физике Разбор задания №14 ЕГЭ по информатике
Разбор задания №14 ЕГЭ по информатике Базы данных. Введение в курс баз данных
Базы данных. Введение в курс баз данных Презентация Утилиты. Текстовый редактор
Презентация Утилиты. Текстовый редактор JavaScript Date
JavaScript Date Розробка програмного забезпечення для мікропроцесорної системи автомобільний годинник-термометр-вольтметр
Розробка програмного забезпечення для мікропроцесорної системи автомобільний годинник-термометр-вольтметр Алгоритмы в жизни
Алгоритмы в жизни Основы алгоритмизации. Типы алгоритмов. (Лекция 1)
Основы алгоритмизации. Типы алгоритмов. (Лекция 1) Теория и практика информационно-аналитической работы. Семинар 2
Теория и практика информационно-аналитической работы. Семинар 2 Аффинные преобразования в компьютерной графике. (Тема 5)
Аффинные преобразования в компьютерной графике. (Тема 5) Продвижение бизнеса и бренда в социальных сетях
Продвижение бизнеса и бренда в социальных сетях Тезаурус Безопасный интернет
Тезаурус Безопасный интернет Дизайн видеопродукции. Программа Adobe Premier Pro
Дизайн видеопродукции. Программа Adobe Premier Pro Інформаційне забезпечення ІС
Інформаційне забезпечення ІС Урок информатики 6 класс Отношение понятий.
Урок информатики 6 класс Отношение понятий. Программа Speam
Программа Speam Mass Media
Mass Media Правила составления списка литературы
Правила составления списка литературы Программирование циклов с заданным числом повторений
Программирование циклов с заданным числом повторений Поняття документу. Призначення та класифікація документів. Документообіг
Поняття документу. Призначення та класифікація документів. Документообіг