- Теория автоматического управления в картинках

Содержание
- 2. Содержание Что такое ТАУ Классификация сущностей ТАУ Кое-что об алгебре систем Одномерные регуляторы Что делать с
- 3. О чем это ТАУ = наука преобразовании систем В идеале – об инвертировании систем ТАУ рассматривает
- 4. Как у них Control theory = "матан" Process control – как это реализовать и применить
- 5. Гимн черному ящику =) Стандартная нотация (у них =): P – "plant" – объект управления С
- 6. Управление как прозрачность (тождественность)
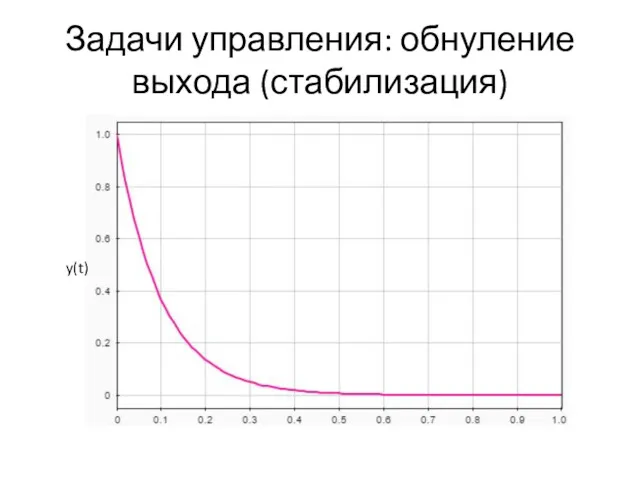
- 7. Задачи управления: обнуление выхода (стабилизация) y(t)
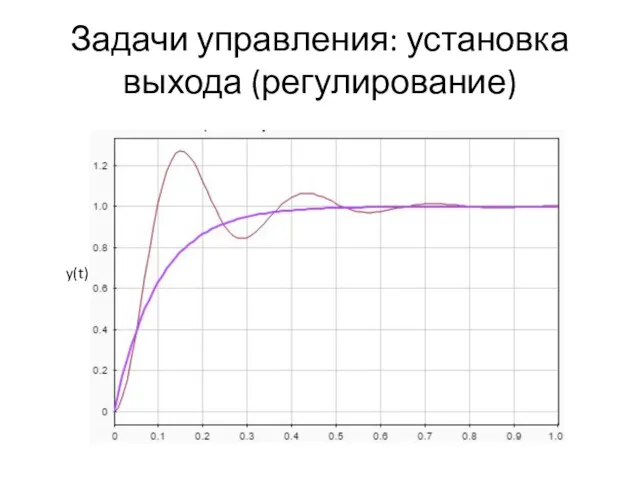
- 8. Задачи управления: установка выхода (регулирование) y(t)
- 9. Задачи управления: следование за траекторией желаемое (r) реальное (y)
- 10. Стабилизация Матрёшка задач управления Регулирование Следование за траекторией
- 11. Поведение: устойчивое и не устойчивое Реакция двух систем на постоянное входное воздействие Реакция устойчивой системы Реакция
- 12. Отклик: динамический и статический Вход (постоянный сигнал) Выход Переходной процесс (transient) Установившийся режим (steady state)
- 13. Количество входов: одномерные и многомерные системы SISO – single input single output – одномерная система MIMO
- 14. Линейные и нелинейные системы Линейная система Нелинейная система Формализм: Методы исследования: Преобразование Лапласа, матричный анализ Дифференциальная
- 15. Разомкнутое управление Проблемы: Моделирование: мы никогда не знаем систему P на 100% Неопределенность: система P может
- 16. Разомкнутое управление в центральном отоплении =)
- 17. Замкнутое управление Это уже не обязательно инверсия объекта управления Регулятор делает все от него возможное, чтобы
- 18. Релейный регулятор Если сигнал ошибки > предел, то включить Если сигнал ошибки
- 19. Релейный регулятор – в действии Температура Мощность нагрева
- 20. Непрерывный регулятор – соображения Чем дальше я от цели (чем больше сигнал ошибки) – тем сильнее
- 21. Непрерывный регулятор – еще соображения Долгое время еду не по центру – надо подрулить =)
- 22. ПИД-регулятор Пропорционально-Интегрально-Дифференциальный регулятор (PID)
- 23. ПИД регулятор – в действии Температура Мощность нагрева
- 24. Алгоритм применения и настройки ПИД-регулятора Убедиться, что объект управления имеет прямую характеристику: увеличение входа ведет к
- 25. Вложенные обратные связи
- 26. Что делать с нелинейностями? Ничего не делать (линеаризация в рабочей точке, нелинейность = неопределенность) Последовательная компенсация
- 27. Последовательная компенсация нелинейностей
- 28. Параллельная компенсация нелинейностей (одновременно: инверсия + обратная связь)
- 29. Что делать с многомерностью Проблема: возможна сильная взаимозависимость каналов системы, изменяя одну входную переменную – мы
- 30. Последовательное развязывание входов
- 31. Параллельное развязывание входов
- 32. Методы из умных книг =) Линейная система Нелинейная аффинная система Метод размещения полюсов (pole placement): можно
- 33. Алгебра систем: композиция y u (но в линейных системах можно =)
- 34. Алгебра систем: сложение
- 35. Алгебра систем: нейтральные элементы Нейтральный элемент относительно "умножения" (композиции) – прозрачная система Нейтральный элемент относительно сложения
- 36. Алгебра систем: инверсия
- 37. Алгебра систем: обратная связь
- 38. Одномерный регулятор Одномерный регулятор должен обеспечить нулевой сигнал ошибки, т.е. Что дает цель управления:
- 39. Почитать перед сном =) Олсон Г. Пиани Дж. Цифровые системы автоматизации и управления. СПб.: Невский Диалект,
- 41. Скачать презентацию
Содержание
Что такое ТАУ
Классификация сущностей ТАУ
Кое-что об алгебре систем
Одномерные регуляторы
Что делать с
Содержание
Что такое ТАУ
Классификация сущностей ТАУ
Кое-что об алгебре систем
Одномерные регуляторы
Что делать с
О чем это
ТАУ = наука преобразовании систем
В идеале – об инвертировании
О чем это
ТАУ = наука преобразовании систем
В идеале – об инвертировании
Как у них
Control theory = "матан"
Process control – как это реализовать
Как у них
Control theory = "матан"
Process control – как это реализовать
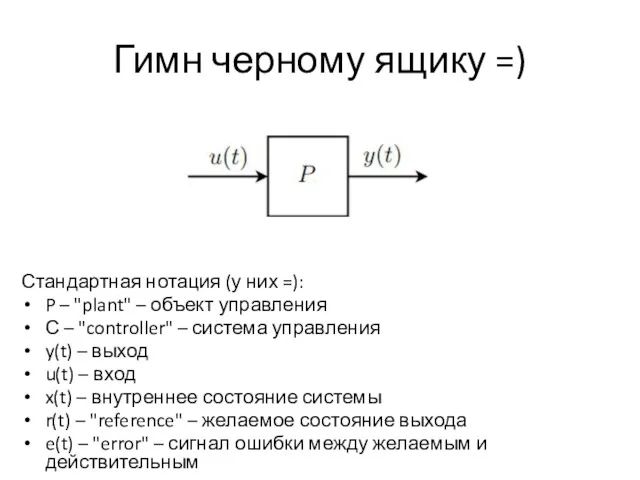
Гимн черному ящику =)
Стандартная нотация (у них =):
P – "plant" –
Гимн черному ящику =)
Стандартная нотация (у них =):
P – "plant" –
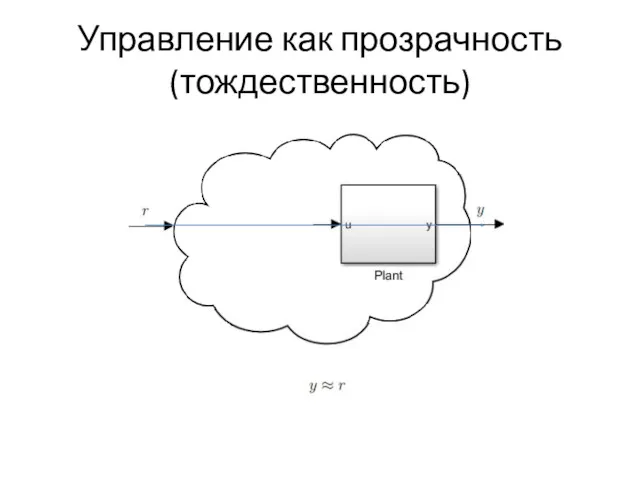
Управление как прозрачность (тождественность)
Управление как прозрачность (тождественность)
Задачи управления: обнуление выхода (стабилизация)
y(t)
Задачи управления: обнуление выхода (стабилизация)
y(t)
Задачи управления: установка выхода (регулирование)
y(t)
Задачи управления: установка выхода (регулирование)
y(t)
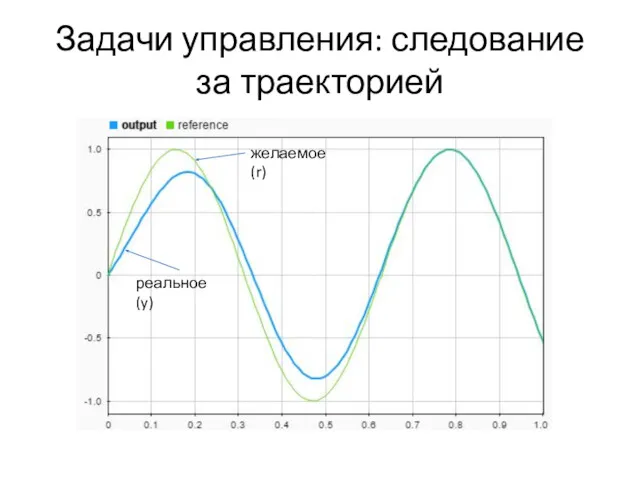
Задачи управления: следование за траекторией
желаемое (r)
реальное (y)
Задачи управления: следование за траекторией
желаемое (r)
реальное (y)
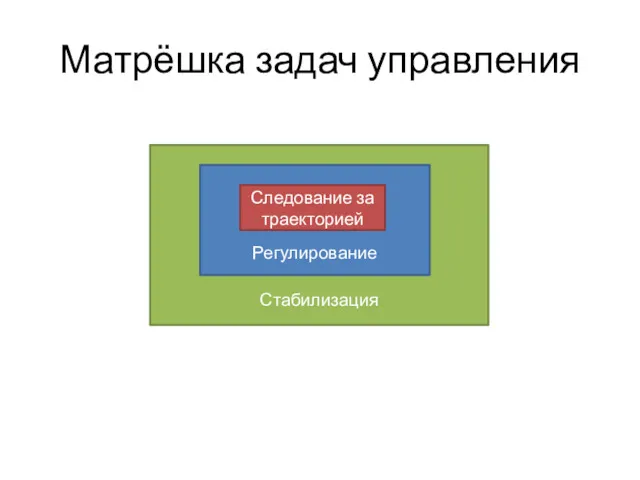
Стабилизация
Матрёшка задач управления
Регулирование
Следование за траекторией
Стабилизация
Матрёшка задач управления
Регулирование
Следование за траекторией
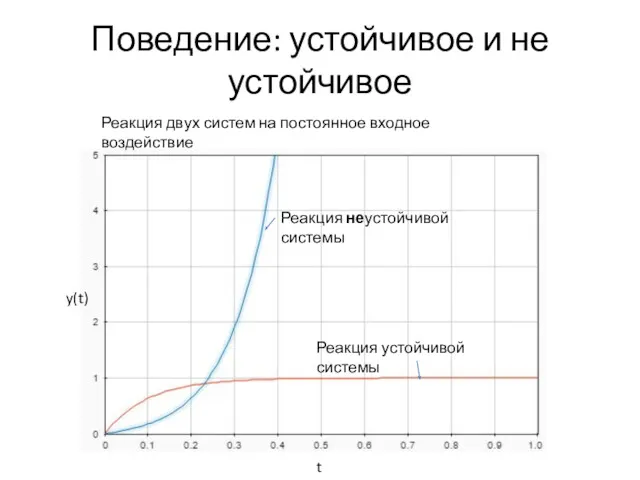
Поведение: устойчивое и не устойчивое
Реакция двух систем на постоянное входное воздействие
Реакция
Поведение: устойчивое и не устойчивое
Реакция двух систем на постоянное входное воздействие
Реакция
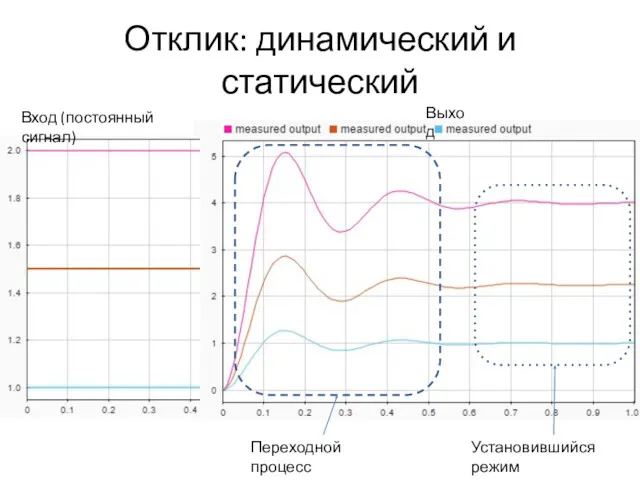
Отклик: динамический и статический
Вход (постоянный сигнал)
Выход
Переходной процесс
(transient)
Установившийся режим
(steady state)
Отклик: динамический и статический
Вход (постоянный сигнал)
Выход
Переходной процесс
(transient)
Установившийся режим
(steady state)
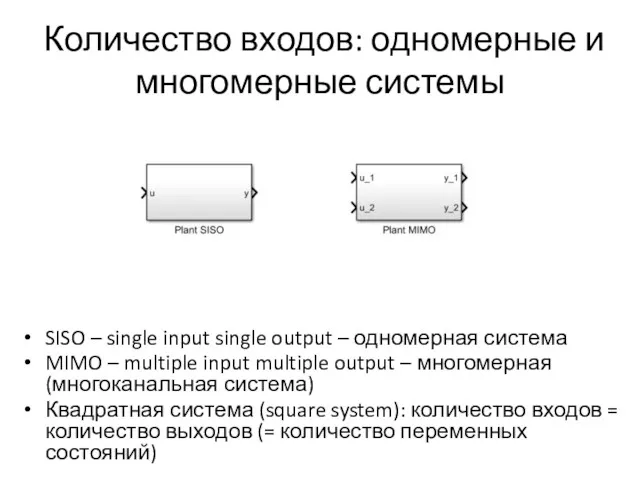
Количество входов: одномерные и многомерные системы
SISO – single input single output
Количество входов: одномерные и многомерные системы
SISO – single input single output
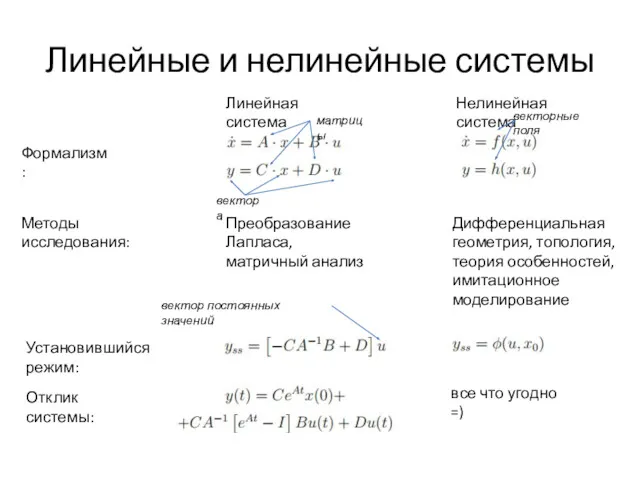
Линейные и нелинейные системы
Линейная система
Нелинейная система
Формализм:
Методы исследования:
Преобразование Лапласа,
матричный анализ
Дифференциальная геометрия, топология,
Линейные и нелинейные системы
Линейная система
Нелинейная система
Формализм:
Методы исследования:
Преобразование Лапласа,
матричный анализ
Дифференциальная геометрия, топология,
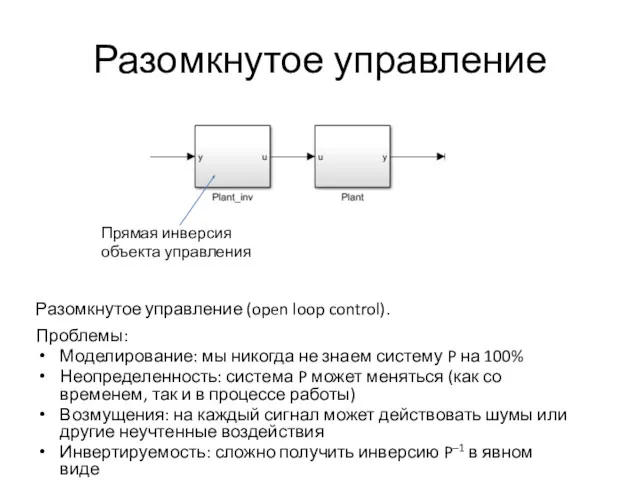
Разомкнутое управление
Проблемы:
Моделирование: мы никогда не знаем систему P на 100%
Неопределенность:
Разомкнутое управление
Проблемы:
Моделирование: мы никогда не знаем систему P на 100%
Неопределенность:
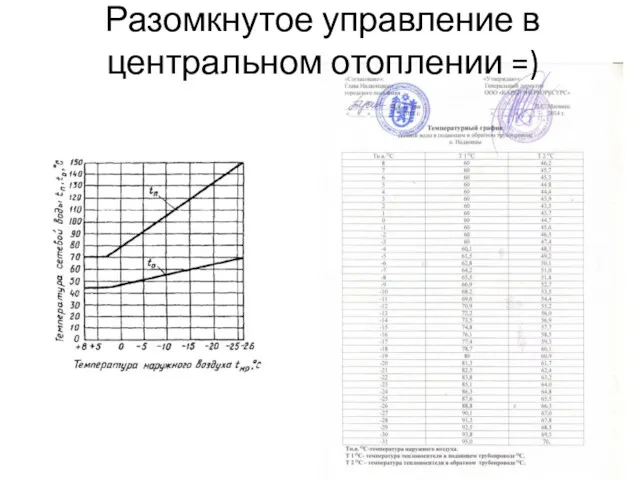
Разомкнутое управление в центральном отоплении =)
Разомкнутое управление в центральном отоплении =)
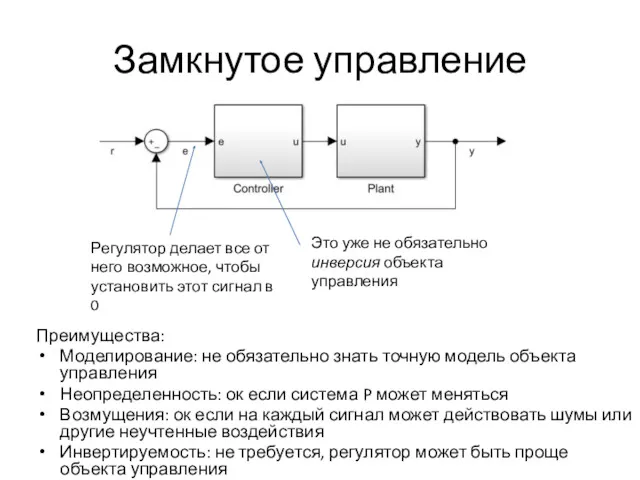
Замкнутое управление
Это уже не обязательно инверсия объекта управления
Регулятор делает все от
Замкнутое управление
Это уже не обязательно инверсия объекта управления
Регулятор делает все от
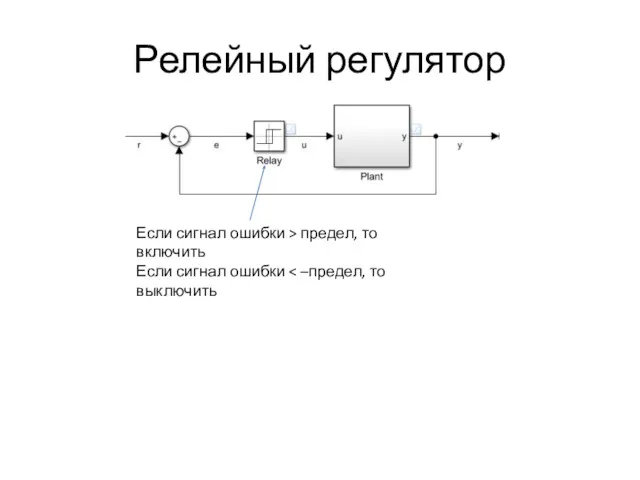
Релейный регулятор
Если сигнал ошибки > предел, то включить
Если сигнал ошибки <
Релейный регулятор
Если сигнал ошибки > предел, то включить
Если сигнал ошибки <
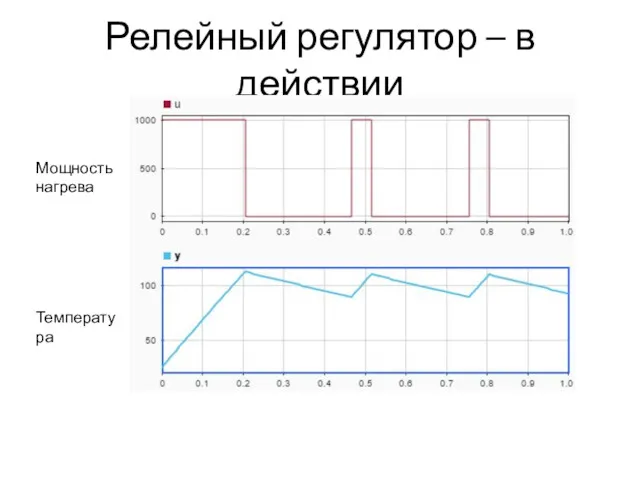
Релейный регулятор – в действии
Температура
Мощность
нагрева
Релейный регулятор – в действии
Температура
Мощность
нагрева
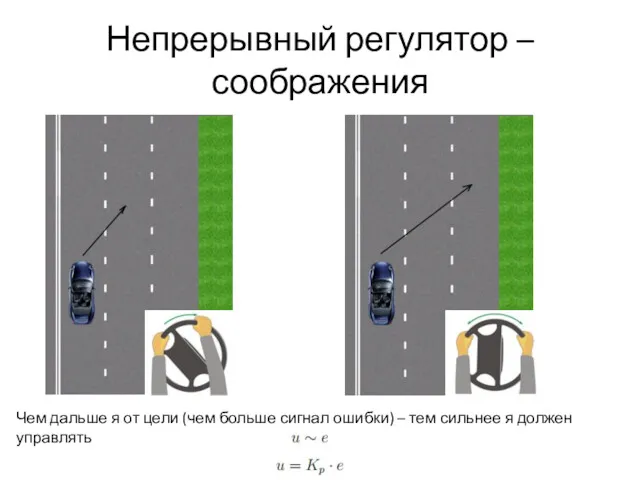
Непрерывный регулятор – соображения
Чем дальше я от цели (чем больше сигнал
Непрерывный регулятор – соображения
Чем дальше я от цели (чем больше сигнал
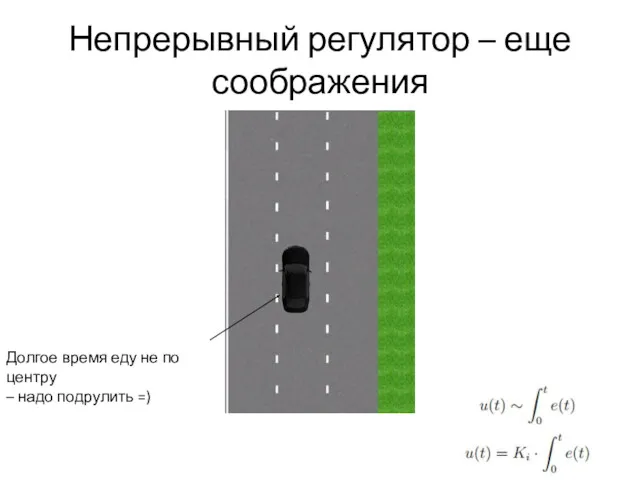
Непрерывный регулятор – еще соображения
Долгое время еду не по центру
–
Непрерывный регулятор – еще соображения
Долгое время еду не по центру
–
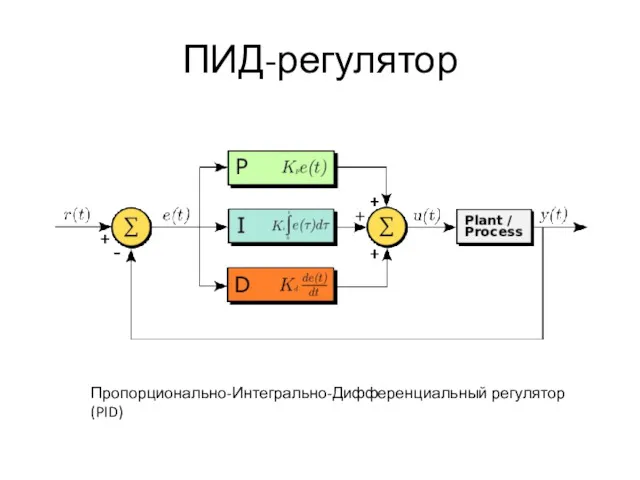
ПИД-регулятор
Пропорционально-Интегрально-Дифференциальный регулятор (PID)
ПИД-регулятор
Пропорционально-Интегрально-Дифференциальный регулятор (PID)
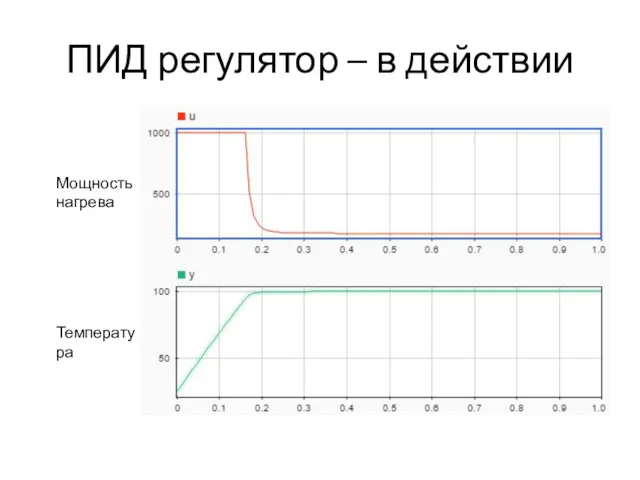
ПИД регулятор – в действии
Температура
Мощность
нагрева
ПИД регулятор – в действии
Температура
Мощность
нагрева
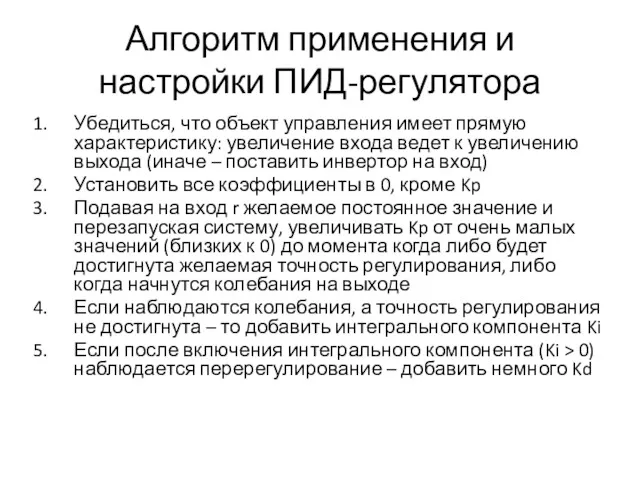
Алгоритм применения и настройки ПИД-регулятора
Убедиться, что объект управления имеет прямую характеристику:
Алгоритм применения и настройки ПИД-регулятора
Убедиться, что объект управления имеет прямую характеристику:
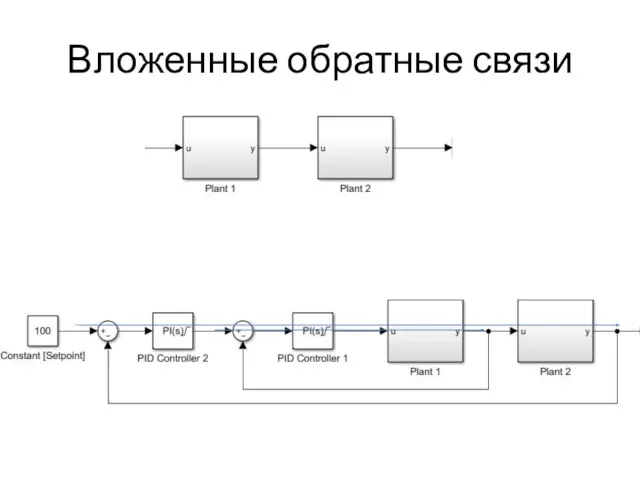
Вложенные обратные связи
Вложенные обратные связи
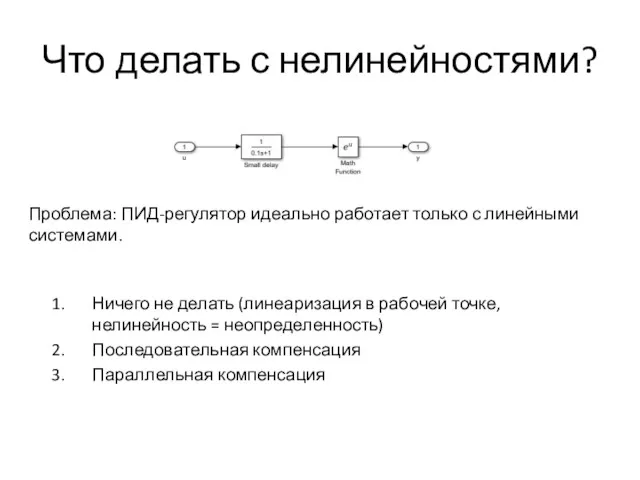
Что делать с нелинейностями?
Ничего не делать (линеаризация в рабочей точке, нелинейность
Что делать с нелинейностями?
Ничего не делать (линеаризация в рабочей точке, нелинейность
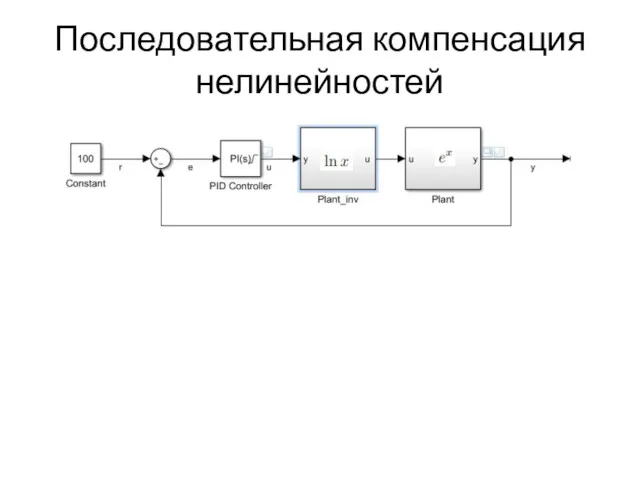
Последовательная компенсация нелинейностей
Последовательная компенсация нелинейностей
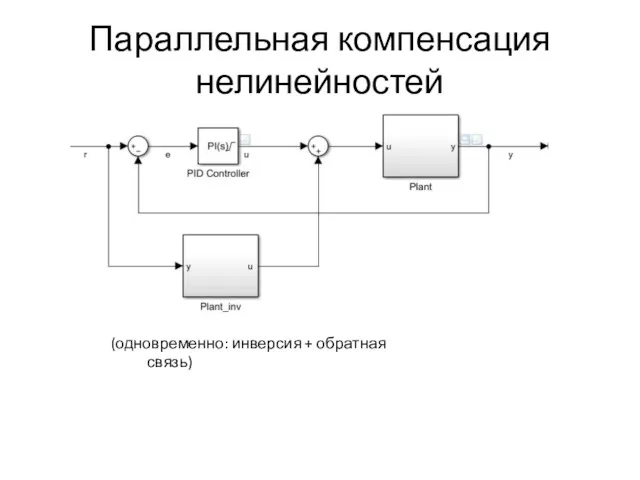
Параллельная компенсация нелинейностей
(одновременно: инверсия + обратная связь)
Параллельная компенсация нелинейностей
(одновременно: инверсия + обратная связь)
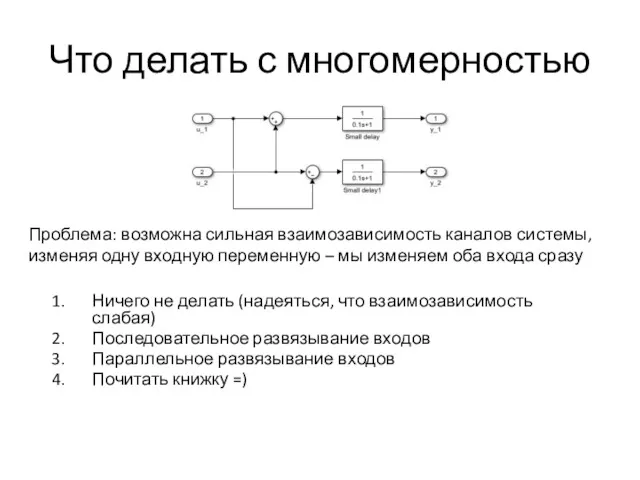
Что делать с многомерностью
Проблема: возможна сильная взаимозависимость каналов системы, изменяя
Что делать с многомерностью
Проблема: возможна сильная взаимозависимость каналов системы, изменяя
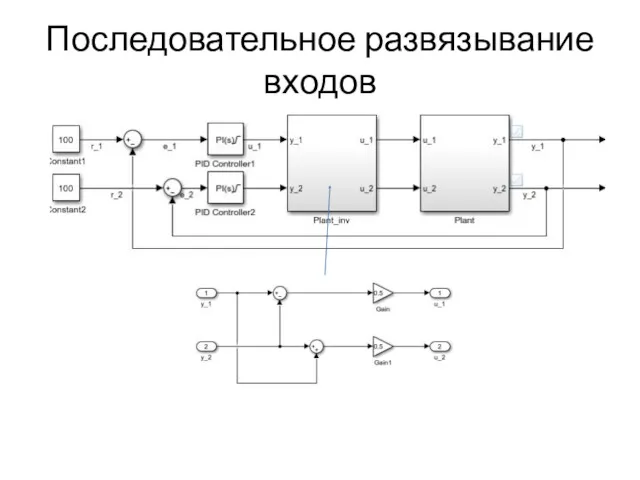
Последовательное развязывание входов
Последовательное развязывание входов
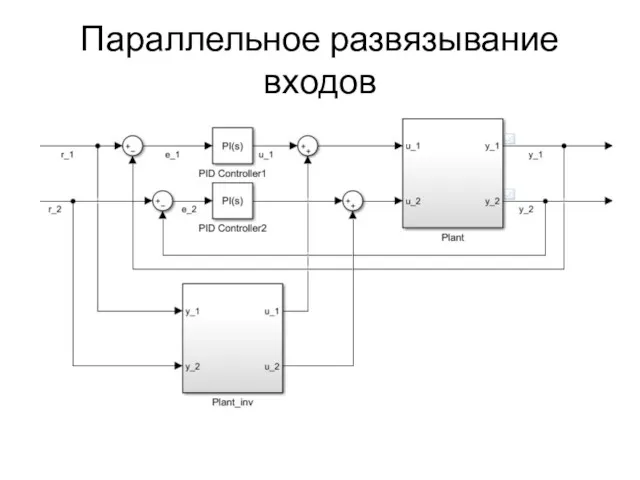
Параллельное развязывание входов
Параллельное развязывание входов
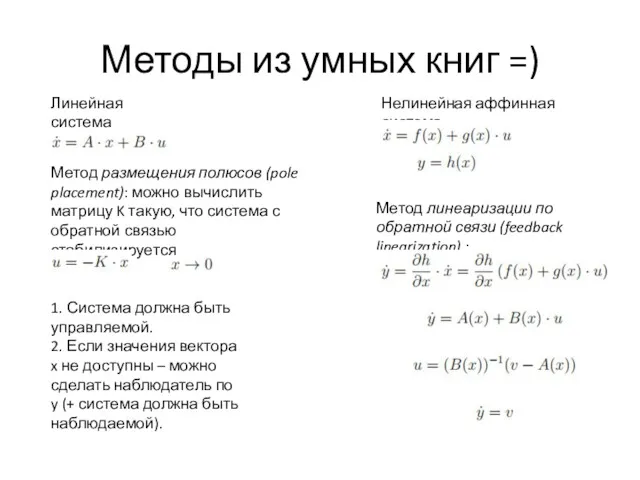
Методы из умных книг =)
Линейная система
Нелинейная аффинная система
Метод размещения полюсов (pole
Методы из умных книг =)
Линейная система
Нелинейная аффинная система
Метод размещения полюсов (pole
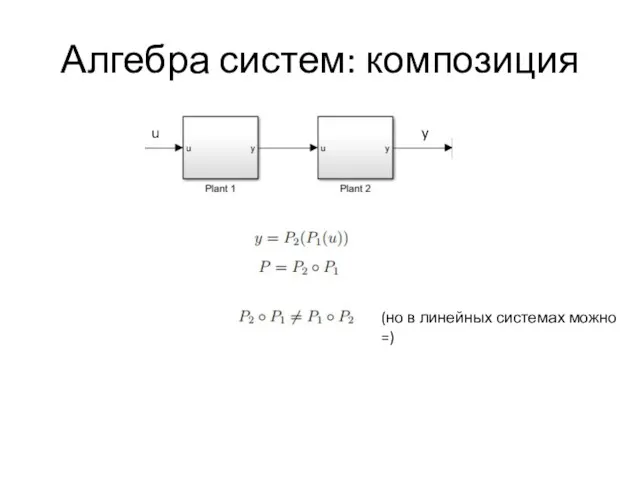
Алгебра систем: композиция
y
u
(но в линейных системах можно =)
Алгебра систем: композиция
y
u
(но в линейных системах можно =)
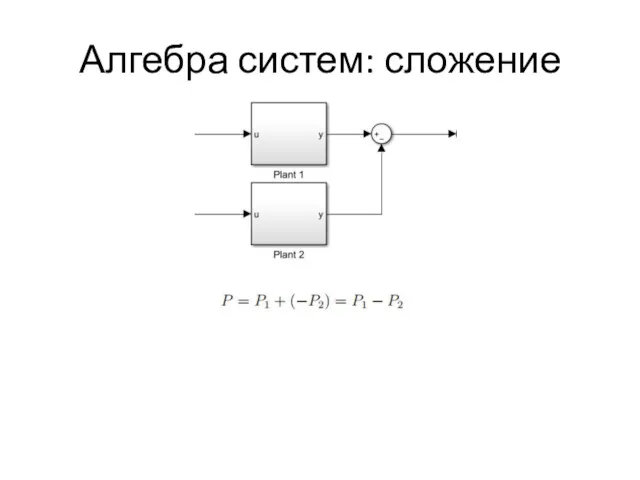
Алгебра систем: сложение
Алгебра систем: сложение
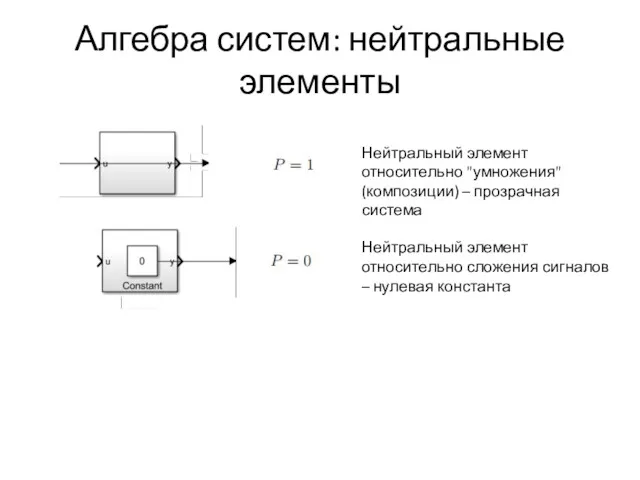
Алгебра систем: нейтральные элементы
Нейтральный элемент относительно "умножения" (композиции) – прозрачная система
Нейтральный
Алгебра систем: нейтральные элементы
Нейтральный элемент относительно "умножения" (композиции) – прозрачная система
Нейтральный

Алгебра систем: инверсия
Алгебра систем: инверсия
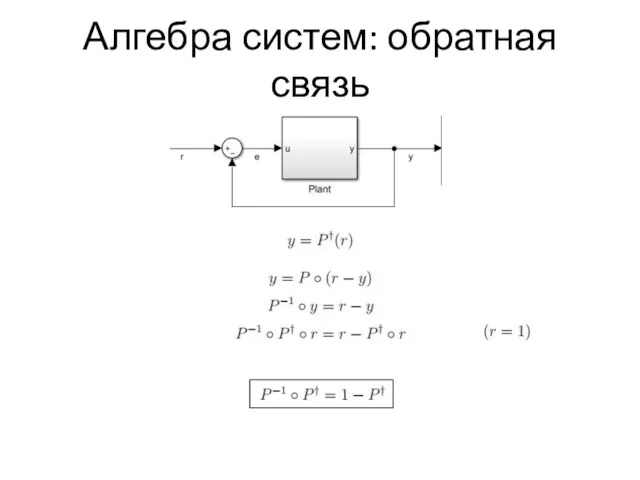
Алгебра систем: обратная связь
Алгебра систем: обратная связь
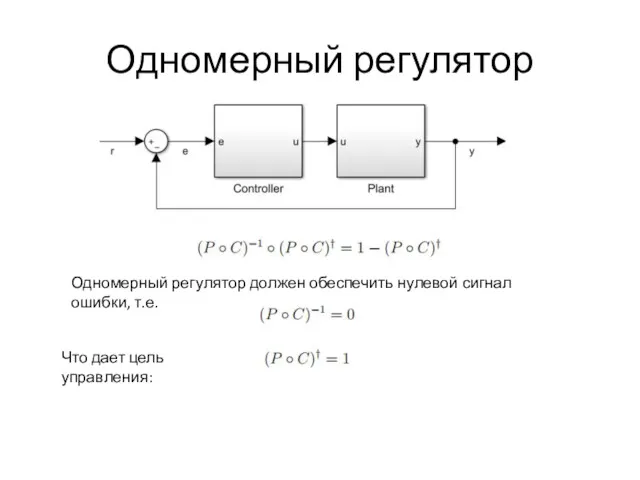
Одномерный регулятор
Одномерный регулятор должен обеспечить нулевой сигнал ошибки, т.е.
Что дает цель
Одномерный регулятор
Одномерный регулятор должен обеспечить нулевой сигнал ошибки, т.е.
Что дает цель
Почитать перед сном =)
Олсон Г. Пиани Дж. Цифровые системы автоматизации и
Почитать перед сном =)
Олсон Г. Пиани Дж. Цифровые системы автоматизации и
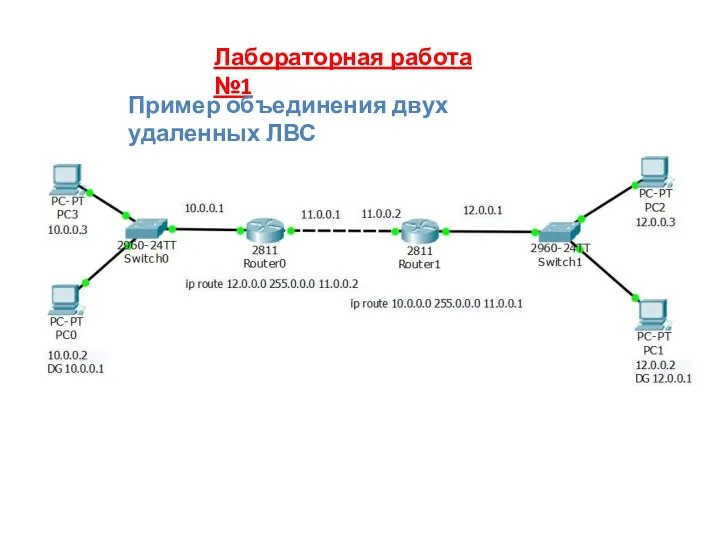 Лабораторная работа №1. Пример объединения двух удаленных ЛВС через VPN
Лабораторная работа №1. Пример объединения двух удаленных ЛВС через VPN Программирование линейных алгоритмов. Что такое алгоритм?
Программирование линейных алгоритмов. Что такое алгоритм? Урок - игра Условные алгоритмы.- 8 класс
Урок - игра Условные алгоритмы.- 8 класс ERWin моделдеу аспабы
ERWin моделдеу аспабы Основы теории информации. Понятие информации
Основы теории информации. Понятие информации Основные информационные процессы и их реализация с помощью компьютера
Основные информационные процессы и их реализация с помощью компьютера Яких етапів слід дотримуватися при розв'язуванні задач за допомогою комп'ютера. (11 класс. Урок 5))
Яких етапів слід дотримуватися при розв'язуванні задач за допомогою комп'ютера. (11 класс. Урок 5)) Verbal and non-verbal communications
Verbal and non-verbal communications Введение в информатику. 7 класс
Введение в информатику. 7 класс Основы программирования на C#. Раздел № 4
Основы программирования на C#. Раздел № 4 Язык C++
Язык C++ Что такое информация? Обработка информации
Что такое информация? Обработка информации Антивирусные программы
Антивирусные программы Неиерархические классификации
Неиерархические классификации Базы данных. Основные понятия
Базы данных. Основные понятия Язык запросов SQL
Язык запросов SQL Операційні системи. Реалізація файлових систем
Операційні системи. Реалізація файлових систем Программирование на языке Python. Вычисления
Программирование на языке Python. Вычисления Использование компьютерных технологий в детском саду.
Использование компьютерных технологий в детском саду. Моделирование и формализация
Моделирование и формализация Первые эксперименты по обучению учащихся элементам программирования и кибернетики
Первые эксперименты по обучению учащихся элементам программирования и кибернетики Основные инструкции языка Visual Basic
Основные инструкции языка Visual Basic Всемирная паутина
Всемирная паутина Путешествие в страну Информатика. 8 класс
Путешествие в страну Информатика. 8 класс MATLAB ортасында матрицалармен жұмыс
MATLAB ортасында матрицалармен жұмыс Информационные технологии в образовании
Информационные технологии в образовании Динамические структуры данных. Лекция 9
Динамические структуры данных. Лекция 9 Создание таблиц в СУБД Microsoft Access
Создание таблиц в СУБД Microsoft Access