- Трехмерное моделирование

Содержание
- 2. Трехмерные модели
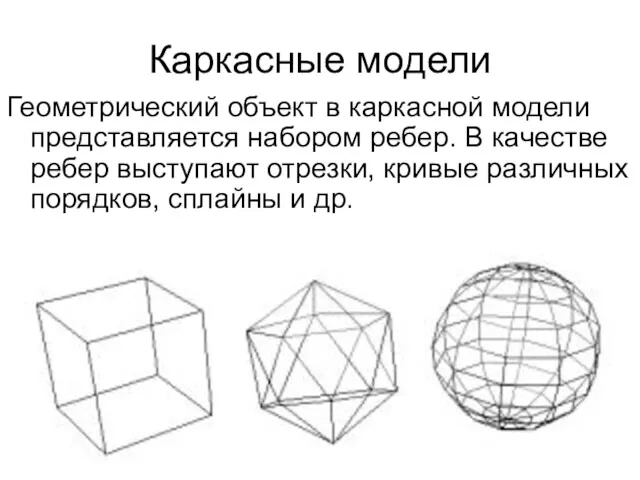
- 3. Каркасные модели Геометрический объект в каркасной модели представляется набором ребер. В качестве ребер выступают отрезки, кривые
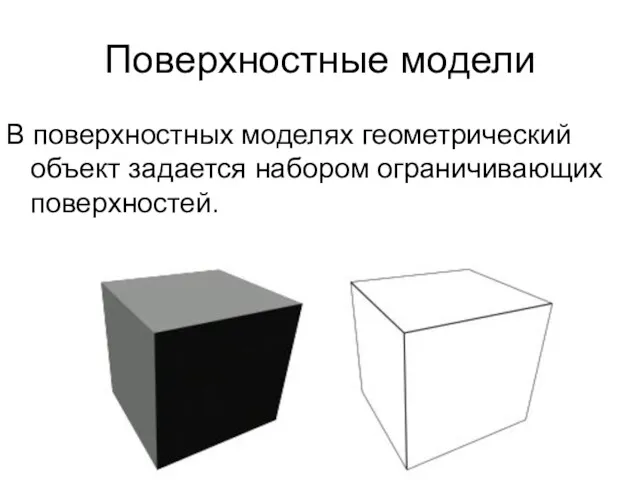
- 4. Поверхностные модели В поверхностных моделях геометрический объект задается набором ограничивающих поверхностей.
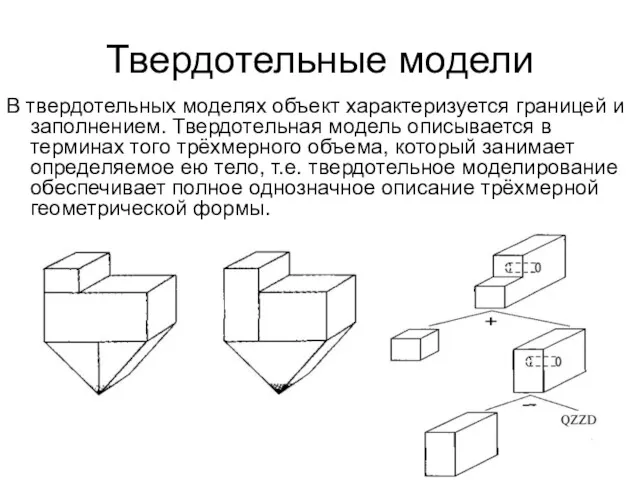
- 5. Твердотельные модели В твердотельных моделях объект характеризуется границей и заполнением. Твердотельная модель описывается в терминах того
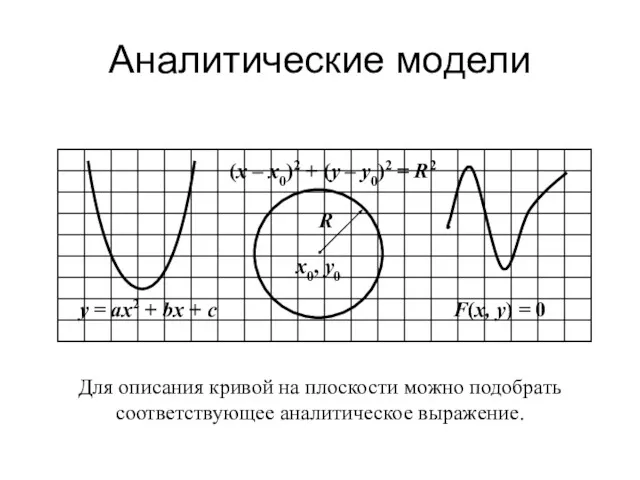
- 6. Аналитические модели Для описания кривой на плоскости можно подобрать соответствующее аналитическое выражение.
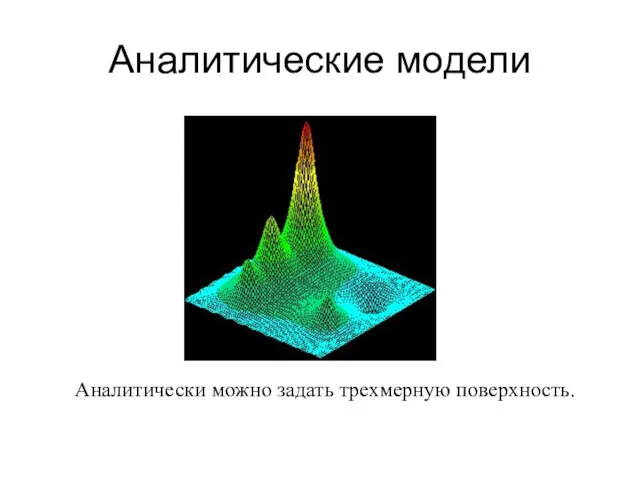
- 7. Аналитические модели Аналитически можно задать трехмерную поверхность.
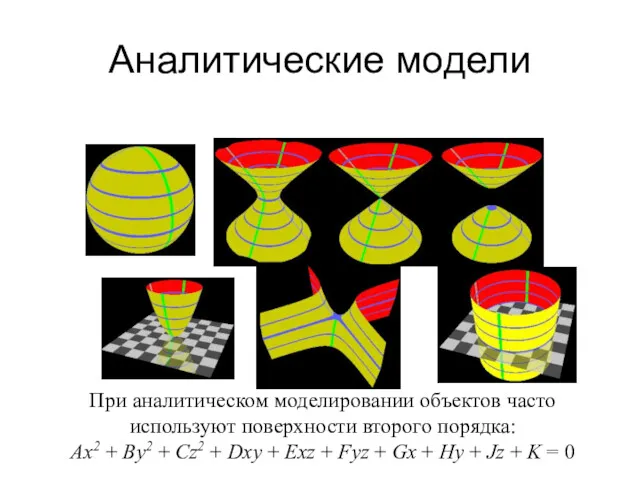
- 8. Аналитические модели При аналитическом моделировании объектов часто используют поверхности второго порядка: Ax2 + By2 + Cz2
- 9. Аналитические модели
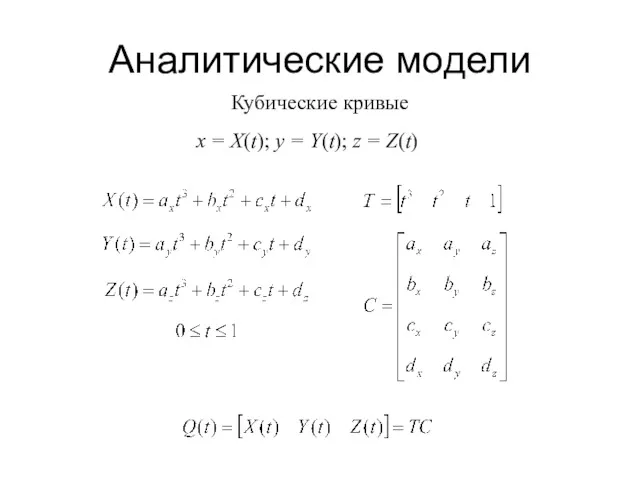
- 10. Аналитические модели Кубические кривые x = X(t); y = Y(t); z = Z(t)
- 11. Аналитические модели Построение кривых
- 12. Аналитические модели Кубический полином Для нахождения кубического полинома требуется установить значения его четырех коэффициентов. Для этого
- 13. Аналитические модели Базовая матрица, геометрический вектор, стыковочная матрица Q(t) = TC = TMG = BG M
- 14. Аналитические модели Кривые Эрмита Кривые Эрмита – частный случай кубических полиномиальных кривых, которые задаются концевыми точками
- 15. Аналитические модели Базовая матрица Эрмита
- 16. Аналитические модели Матричное уравнение кривых Эрмита X(t) = TMGx, Y(t) = TMGy, Z(t) = TMGz Q(t)
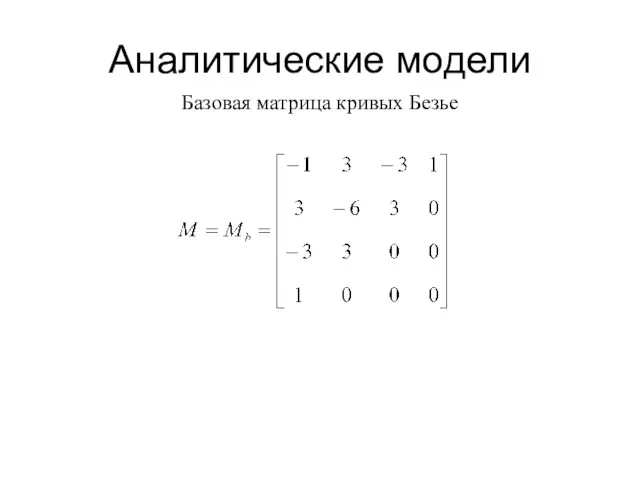
- 17. Аналитические модели Кривые Безье Кривые Безье – специальный вид кубических полиномиальных кривых, у которых для определения
- 18. Аналитические модели Параметры кривых Безье Начальный R1 и конечный R4 касательные векторы кривой Безье зависят от
- 19. Аналитические модели Расчет параметров кривых Безье Mh, Gh – базовая матрица и геометрический вектор Эрмита Mb,
- 20. Аналитические модели Базовая матрица кривых Безье
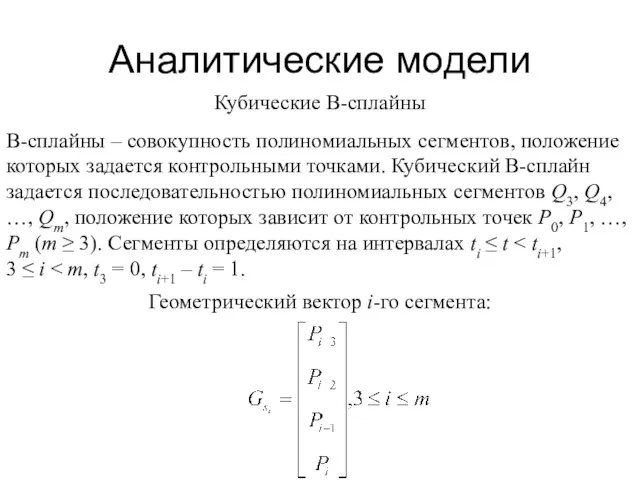
- 21. Аналитические модели Кубические B-сплайны B-сплайны – совокупность полиномиальных сегментов, положение которых задается контрольными точками. Кубический B-сплайн
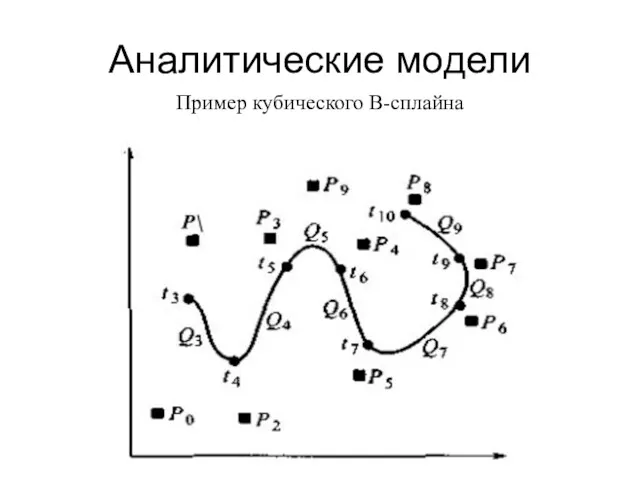
- 22. Аналитические модели Пример кубического B-сплайна
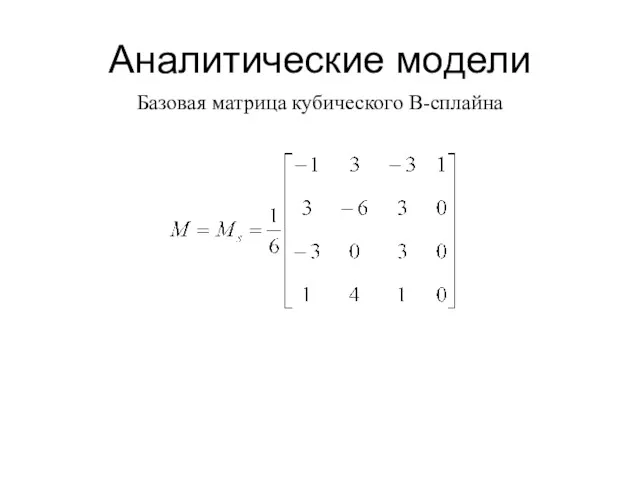
- 23. Аналитические модели Базовая матрица кубического B-сплайна
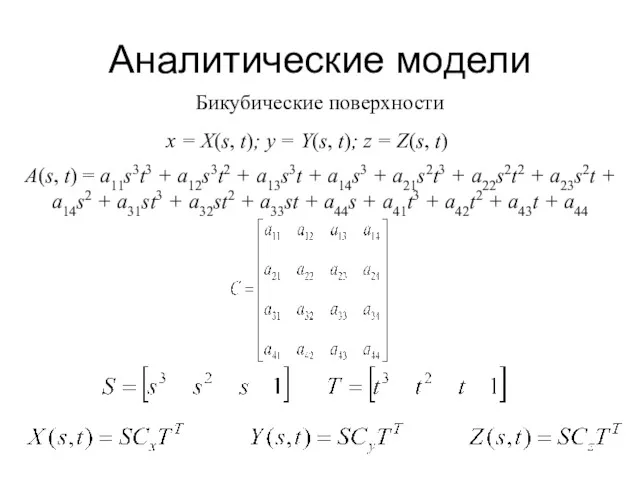
- 24. Аналитические модели Бикубические поверхности x = X(s, t); y = Y(s, t); z = Z(s, t)
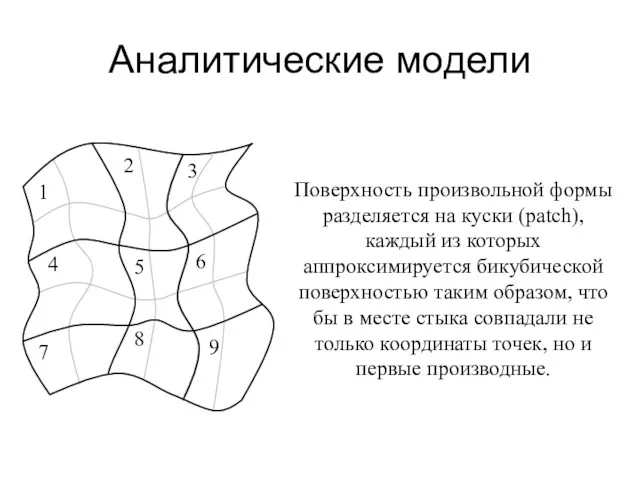
- 25. Аналитические модели Поверхность произвольной формы разделяется на куски (patch), каждый из которых аппроксимируется бикубической поверхностью таким
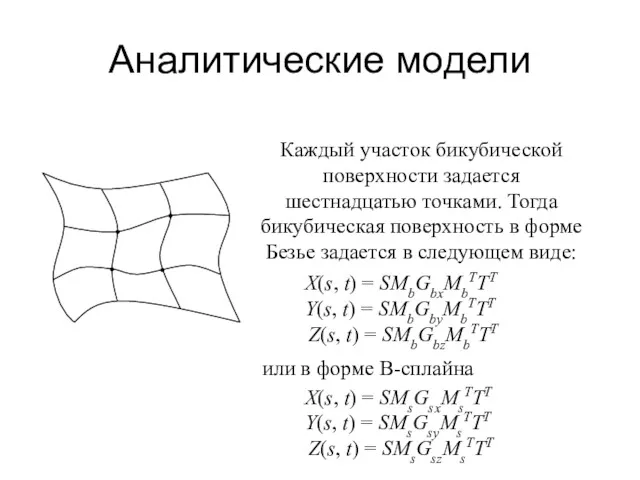
- 26. Аналитические модели Каждый участок бикубической поверхности задается шестнадцатью точками. Тогда бикубическая поверхность в форме Безье задается
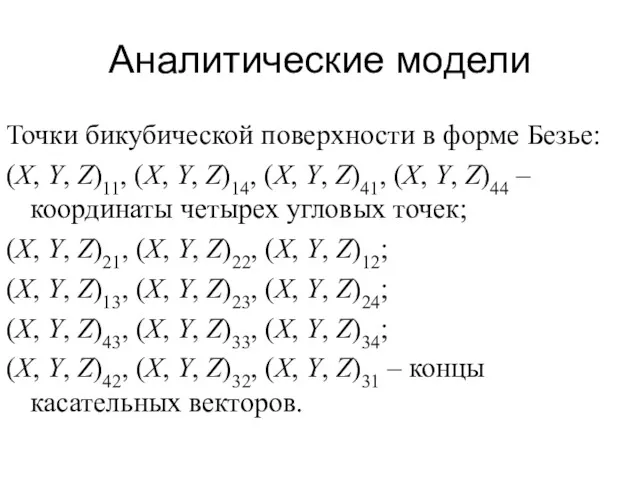
- 27. Аналитические модели Точки бикубической поверхности в форме Безье: (X, Y, Z)11, (X, Y, Z)14, (X, Y,
- 28. Аналитические модели
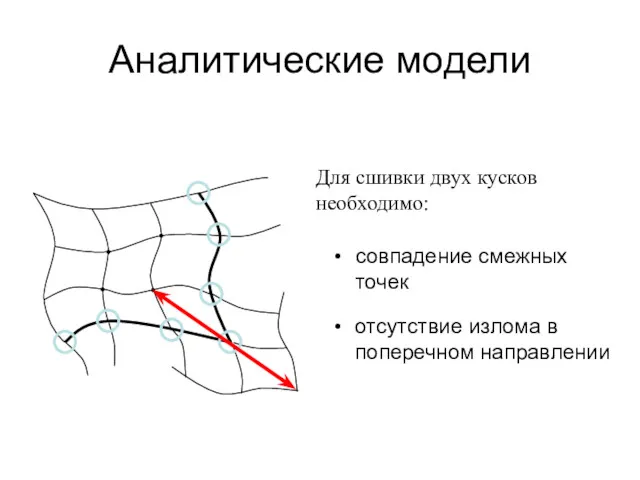
- 29. Аналитические модели 11 Для сшивки двух кусков необходимо: совпадение смежных точек отсутствие излома в поперечном направлении
- 30. Полигональные модели Кривая на плоскости аппроксимируется набором отрезков, каждый из которых определяется двумя точками – начала
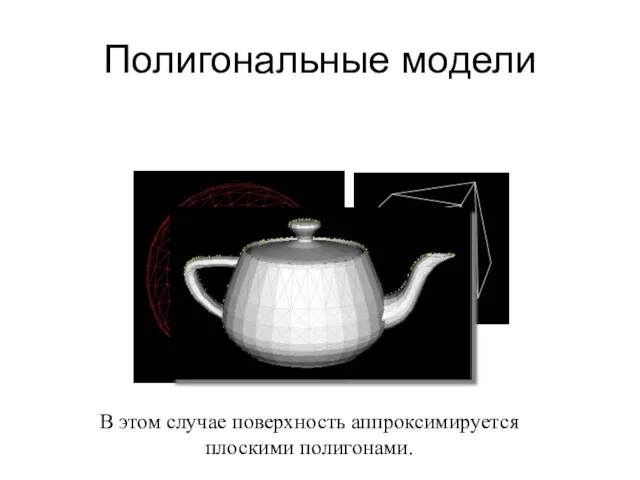
- 31. Полигональные модели В этом случае поверхность аппроксимируется плоскими полигонами.
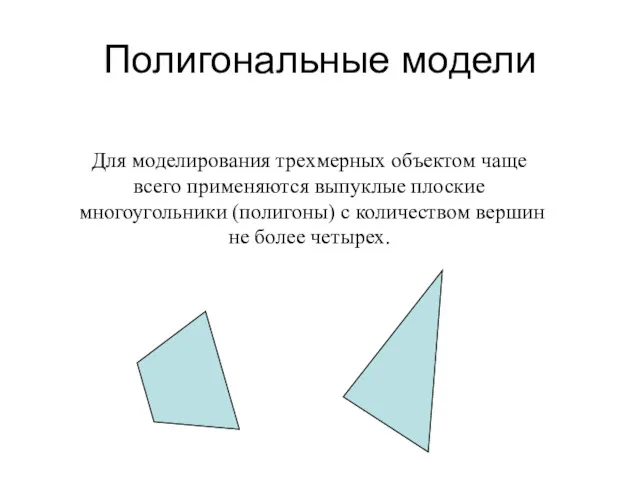
- 32. Полигональные модели Для моделирования трехмерных объектом чаще всего применяются выпуклые плоские многоугольники (полигоны) с количеством вершин
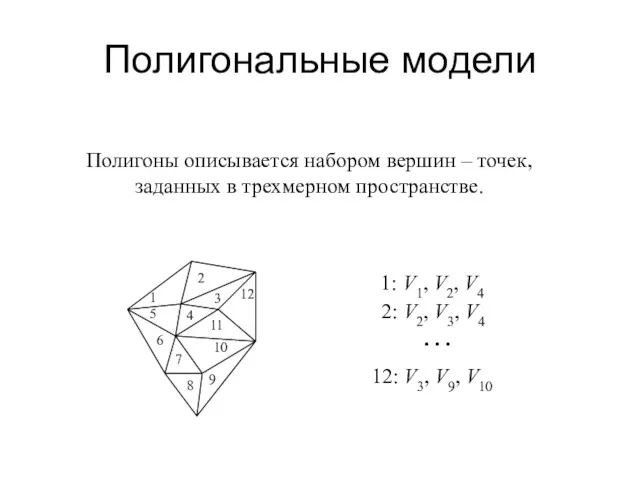
- 33. Полигональные модели Полигоны описывается набором вершин – точек, заданных в трехмерном пространстве. 1: V1, V2, V4
- 34. Аппроксимировать трехмерную плоскость можно с разной точностью. Количество вершин в модели зависит от требуемого качества картинки
- 35. Полигональные модели Полигональная сетка – набор полигонов (граней), которые в совокупности образуют форму объекта. Полигональная сетка
- 36. Полигональные модели Полигональная сетка задается списком полигонов и информацией о направлении, куда обращен каждый полигон. Информация
- 37. Полигональные модели Свойства полигональной сетки: Монолитность – сетка представляет монолитный объект, если совокупность его граней заключает
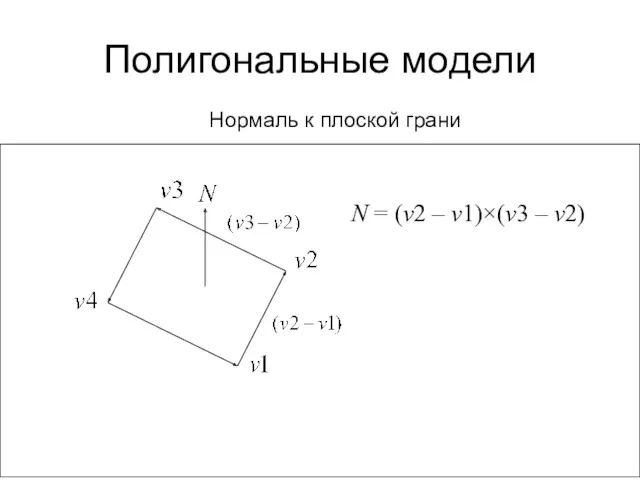
- 38. Полигональные модели Нормаль к плоской грани N = (v2 – v1)×(v3 – v2)
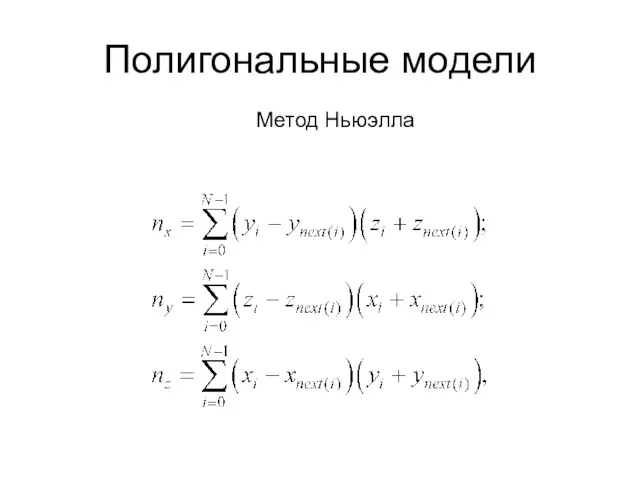
- 39. Полигональные модели Метод Ньюэлла
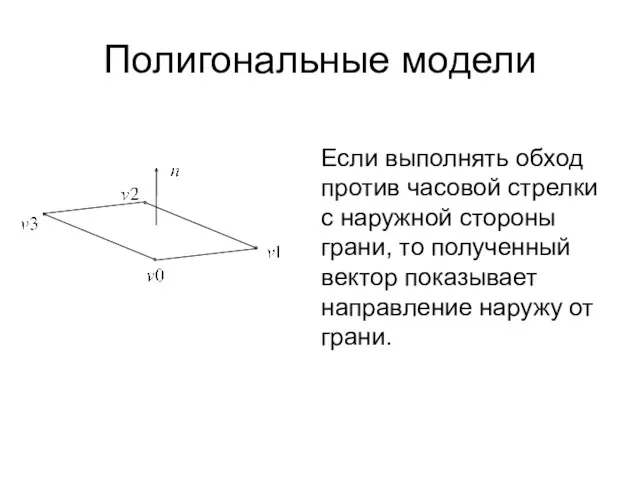
- 40. Полигональные модели Если выполнять обход против часовой стрелки с наружной стороны грани, то полученный вектор показывает
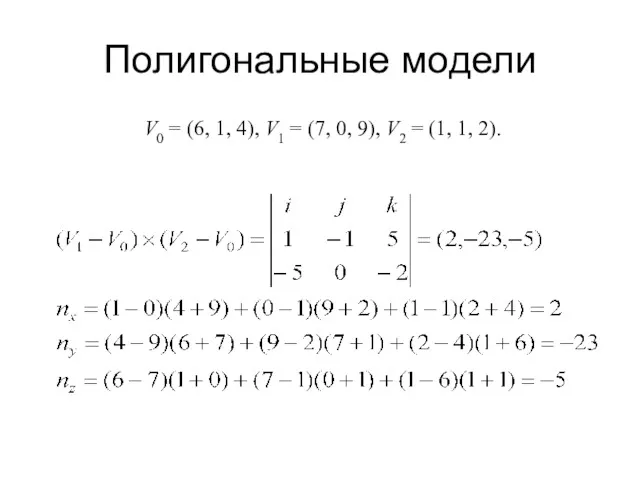
- 41. Полигональные модели V0 = (6, 1, 4), V1 = (7, 0, 9), V2 = (1, 1,
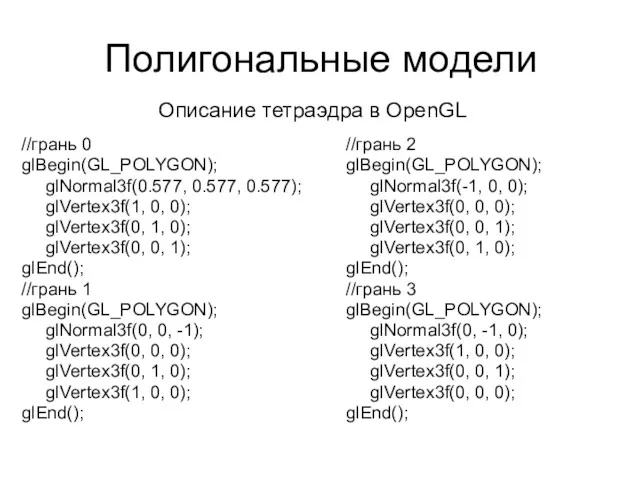
- 42. Полигональные модели //грань 0 glBegin(GL_POLYGON); glNormal3f(0.577, 0.577, 0.577); glVertex3f(1, 0, 0); glVertex3f(0, 1, 0); glVertex3f(0, 0,
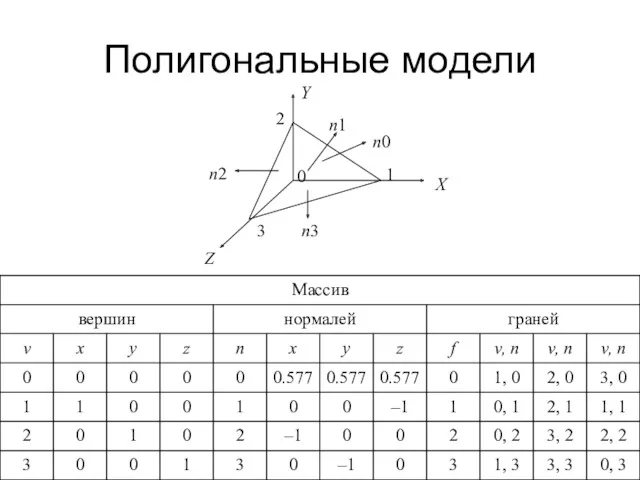
- 43. Полигональные модели Структура хранения данных полигональной сетки: в массиве вершин хранятся без повторений координаты всех вершин;
- 44. Полигональные модели
- 45. Полигональная модель Полиэдр – связная сетка из простых плоских полигонов, которая ограничивает конечный объем пространства. Каждое
- 46. Полигональные модели Фундаментальное соотношение между количеством граней F, ребер E и вершин V простого многогранника устанавливает
- 48. Скачать презентацию
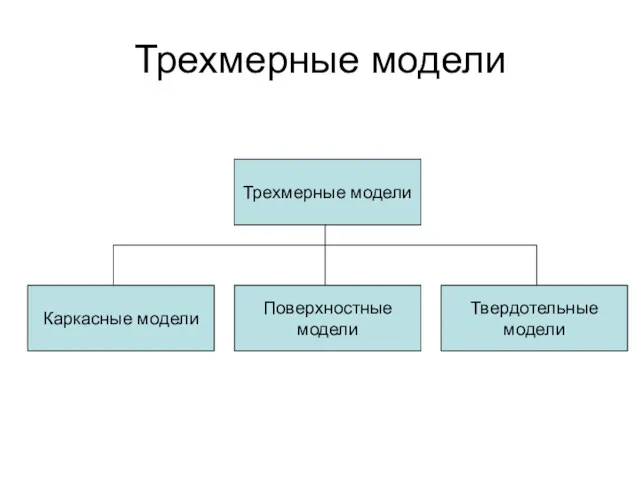
Трехмерные модели
Трехмерные модели
Каркасные модели
Геометрический объект в каркасной модели представляется набором ребер. В качестве
Каркасные модели
Геометрический объект в каркасной модели представляется набором ребер. В качестве
Поверхностные модели
В поверхностных моделях геометрический объект задается набором ограничивающих поверхностей.
Поверхностные модели
В поверхностных моделях геометрический объект задается набором ограничивающих поверхностей.
Твердотельные модели
В твердотельных моделях объект характеризуется границей и заполнением. Твердотельная модель
Твердотельные модели
В твердотельных моделях объект характеризуется границей и заполнением. Твердотельная модель
Аналитические модели
Для описания кривой на плоскости можно подобрать соответствующее аналитическое выражение.
Аналитические модели
Для описания кривой на плоскости можно подобрать соответствующее аналитическое выражение.
Аналитические модели
Аналитически можно задать трехмерную поверхность.
Аналитические модели
Аналитически можно задать трехмерную поверхность.
Аналитические модели
При аналитическом моделировании объектов часто используют поверхности второго порядка:
Ax2 +
Аналитические модели
При аналитическом моделировании объектов часто используют поверхности второго порядка: Ax2 +

Аналитические модели
Аналитические модели
Аналитические модели
Кубические кривые
x = X(t); y = Y(t); z = Z(t)
Аналитические модели
Кубические кривые
x = X(t); y = Y(t); z = Z(t)

Аналитические модели
Построение кривых
Аналитические модели
Построение кривых
Аналитические модели
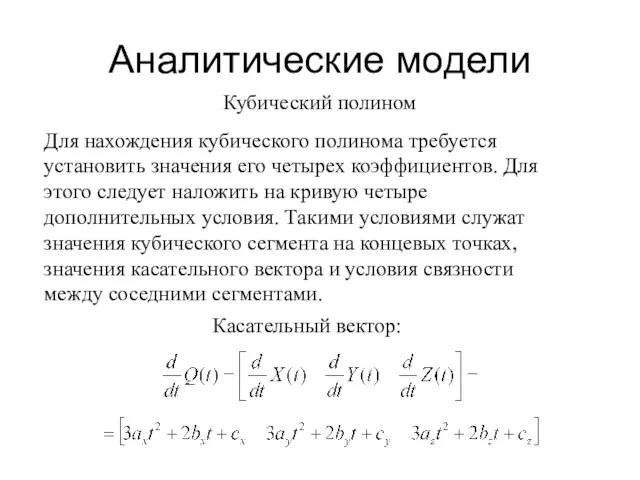
Кубический полином
Для нахождения кубического полинома требуется установить значения его четырех
Аналитические модели
Кубический полином
Для нахождения кубического полинома требуется установить значения его четырех
Аналитические модели
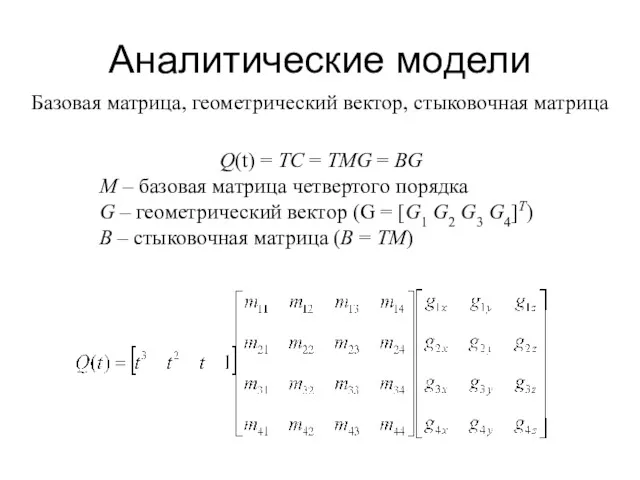
Базовая матрица, геометрический вектор, стыковочная матрица
Q(t) = TC = TMG
Аналитические модели
Базовая матрица, геометрический вектор, стыковочная матрица
Q(t) = TC = TMG
Аналитические модели
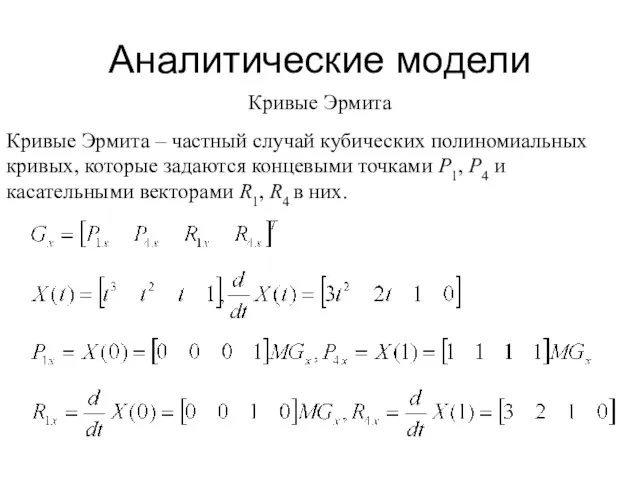
Кривые Эрмита
Кривые Эрмита – частный случай кубических полиномиальных кривых, которые
Аналитические модели
Кривые Эрмита
Кривые Эрмита – частный случай кубических полиномиальных кривых, которые
Аналитические модели
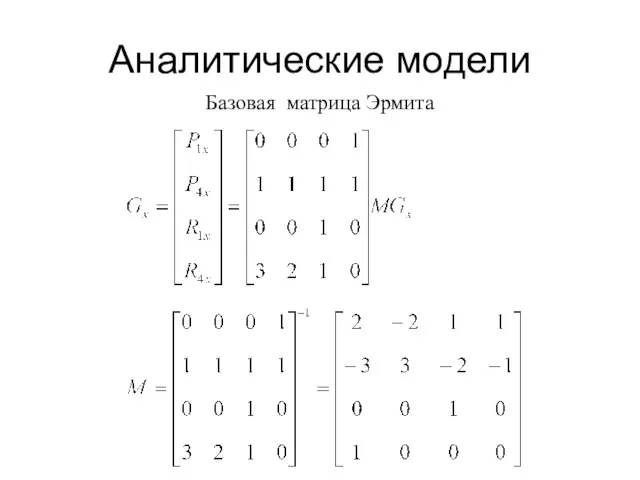
Базовая матрица Эрмита
Аналитические модели
Базовая матрица Эрмита
Аналитические модели
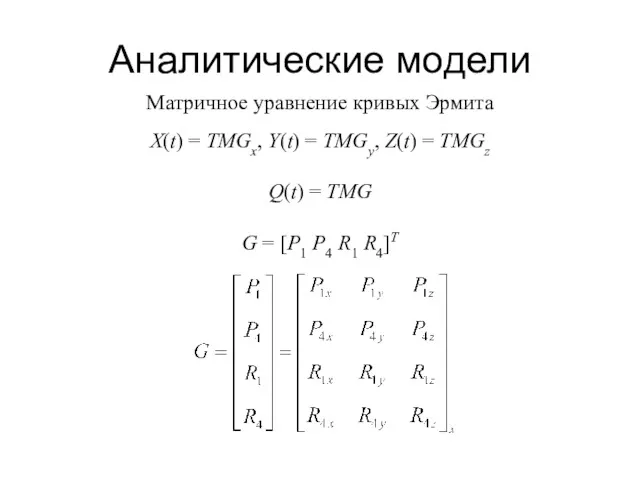
Матричное уравнение кривых Эрмита
X(t) = TMGx, Y(t) = TMGy, Z(t)
Аналитические модели
Матричное уравнение кривых Эрмита
X(t) = TMGx, Y(t) = TMGy, Z(t)
Аналитические модели
Кривые Безье
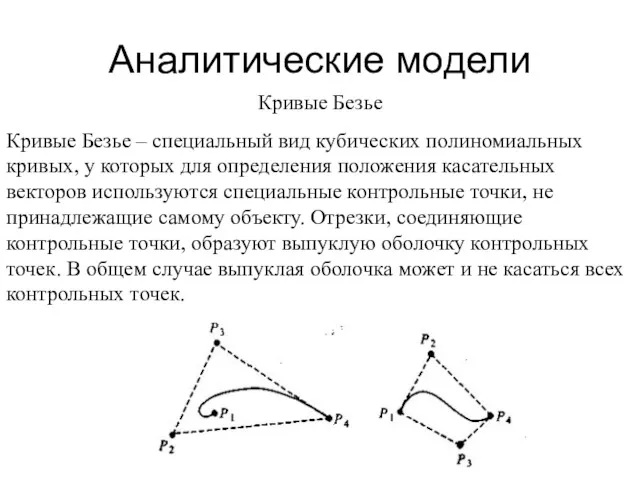
Кривые Безье – специальный вид кубических полиномиальных кривых, у
Аналитические модели
Кривые Безье
Кривые Безье – специальный вид кубических полиномиальных кривых, у
Аналитические модели
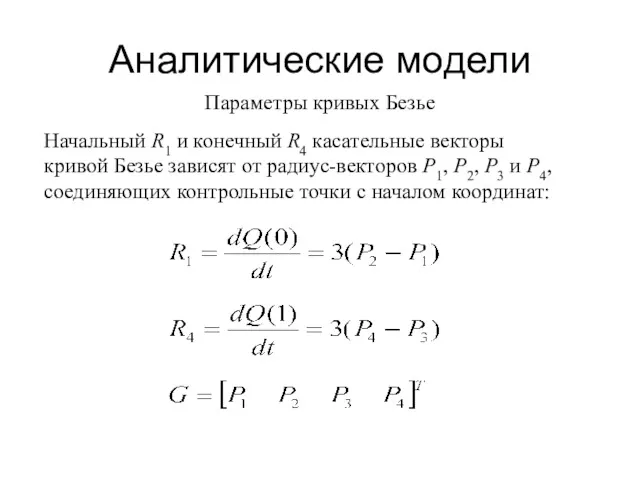
Параметры кривых Безье
Начальный R1 и конечный R4 касательные векторы кривой
Аналитические модели
Параметры кривых Безье
Начальный R1 и конечный R4 касательные векторы кривой
Аналитические модели
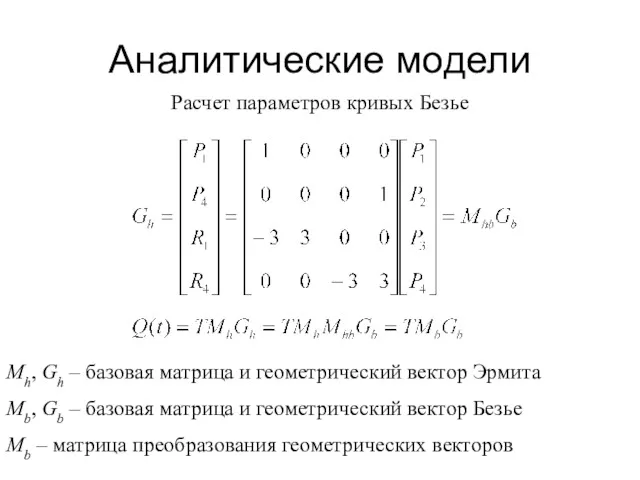
Расчет параметров кривых Безье
Mh, Gh – базовая матрица и геометрический
Аналитические модели
Расчет параметров кривых Безье
Mh, Gh – базовая матрица и геометрический
Аналитические модели
Базовая матрица кривых Безье
Аналитические модели
Базовая матрица кривых Безье
Аналитические модели
Кубические B-сплайны
B-сплайны – совокупность полиномиальных сегментов, положение которых задается контрольными
Аналитические модели
Кубические B-сплайны
B-сплайны – совокупность полиномиальных сегментов, положение которых задается контрольными
Аналитические модели
Пример кубического B-сплайна
Аналитические модели
Пример кубического B-сплайна
Аналитические модели
Базовая матрица кубического B-сплайна
Аналитические модели
Базовая матрица кубического B-сплайна
Аналитические модели
Бикубические поверхности
x = X(s, t); y = Y(s, t); z
Аналитические модели
Бикубические поверхности
x = X(s, t); y = Y(s, t); z
Аналитические модели
Поверхность произвольной формы разделяется на куски (patch), каждый из которых
Аналитические модели
Поверхность произвольной формы разделяется на куски (patch), каждый из которых
Аналитические модели
Каждый участок бикубической поверхности задается шестнадцатью точками. Тогда бикубическая поверхность
Аналитические модели
Каждый участок бикубической поверхности задается шестнадцатью точками. Тогда бикубическая поверхность
Аналитические модели
Точки бикубической поверхности в форме Безье:
(X, Y, Z)11, (X, Y,
Аналитические модели
Точки бикубической поверхности в форме Безье:
(X, Y, Z)11, (X, Y,

Аналитические модели
Аналитические модели
Аналитические модели
11
Для сшивки двух кусков необходимо:
совпадение смежных
точек
отсутствие излома в поперечном направлении
Аналитические модели
11
Для сшивки двух кусков необходимо:
совпадение смежных
точек
отсутствие излома в поперечном направлении

Полигональные модели
Кривая на плоскости аппроксимируется набором отрезков, каждый из которых определяется
Полигональные модели
Кривая на плоскости аппроксимируется набором отрезков, каждый из которых определяется
Полигональные модели
В этом случае поверхность аппроксимируется плоскими полигонами.
Полигональные модели
В этом случае поверхность аппроксимируется плоскими полигонами.
Полигональные модели
Для моделирования трехмерных объектом чаще всего применяются выпуклые плоские многоугольники
Полигональные модели
Для моделирования трехмерных объектом чаще всего применяются выпуклые плоские многоугольники
Полигональные модели
Полигоны описывается набором вершин – точек, заданных в трехмерном пространстве.
Полигональные модели
Полигоны описывается набором вершин – точек, заданных в трехмерном пространстве.
Аппроксимировать трехмерную плоскость можно с разной точностью. Количество вершин в модели
Аппроксимировать трехмерную плоскость можно с разной точностью. Количество вершин в модели
Полигональные модели
Полигональная сетка – набор полигонов (граней), которые в совокупности образуют
Полигональные модели
Полигональная сетка – набор полигонов (граней), которые в совокупности образуют
Полигональные модели
Полигональная сетка задается списком полигонов и информацией о направлении, куда
Полигональные модели
Полигональная сетка задается списком полигонов и информацией о направлении, куда
Полигональные модели
Свойства полигональной сетки:
Монолитность – сетка представляет монолитный объект, если совокупность
Полигональные модели
Свойства полигональной сетки:
Монолитность – сетка представляет монолитный объект, если совокупность
Полигональные модели
Нормаль к плоской грани
N = (v2 – v1)×(v3 – v2)
Полигональные модели
Нормаль к плоской грани
N = (v2 – v1)×(v3 – v2)
Полигональные модели
Метод Ньюэлла
Полигональные модели
Метод Ньюэлла
Полигональные модели
Если выполнять обход против часовой стрелки с наружной стороны грани,
Полигональные модели
Если выполнять обход против часовой стрелки с наружной стороны грани,
Полигональные модели
V0 = (6, 1, 4), V1 = (7, 0, 9),
Полигональные модели
V0 = (6, 1, 4), V1 = (7, 0, 9),
Полигональные модели
//грань 0
glBegin(GL_POLYGON);
glNormal3f(0.577, 0.577, 0.577);
glVertex3f(1, 0, 0);
glVertex3f(0, 1, 0);
glVertex3f(0, 0, 1);
glEnd();
//грань
Полигональные модели
//грань 0
glBegin(GL_POLYGON);
glNormal3f(0.577, 0.577, 0.577);
glVertex3f(1, 0, 0);
glVertex3f(0, 1, 0);
glVertex3f(0, 0, 1);
glEnd();
//грань
Полигональные модели
Структура хранения данных полигональной сетки:
в массиве вершин хранятся без повторений
Полигональные модели
Структура хранения данных полигональной сетки:
в массиве вершин хранятся без повторений
Полигональные модели
Полигональные модели
Полигональная модель
Полиэдр – связная сетка из простых плоских полигонов, которая ограничивает
Полигональная модель
Полиэдр – связная сетка из простых плоских полигонов, которая ограничивает

Полигональные модели
Фундаментальное соотношение между количеством граней F, ребер E и вершин
Полигональные модели
Фундаментальное соотношение между количеством граней F, ребер E и вершин
 Двумерные массивы. Действия со строками и столбцами.
Двумерные массивы. Действия со строками и столбцами. Информация и информационные процессы
Информация и информационные процессы Периферийные устройства ПК
Периферийные устройства ПК Нечеткие нейронные сети
Нечеткие нейронные сети Основы языка Object Pascal/Delphi
Основы языка Object Pascal/Delphi Бронирование индивидуальных услуг (FIT)
Бронирование индивидуальных услуг (FIT) Основы алгоритмизации и объектно-ориентированного программирования
Основы алгоритмизации и объектно-ориентированного программирования Создание документов средствами текстового процессора
Создание документов средствами текстового процессора Поняття мови розмітки гіпертексту. Етапи створення веб-сайтів. Урок №19
Поняття мови розмітки гіпертексту. Етапи створення веб-сайтів. Урок №19 Здоровое питание
Здоровое питание Методические рекомендации по работе с модулем Журнал посещаемости
Методические рекомендации по работе с модулем Журнал посещаемости Доклад по теме Метод проектов
Доклад по теме Метод проектов Библиотечно-библиографическая классификация (ББК)
Библиотечно-библиографическая классификация (ББК) Циклический алгоритм обработки массива чисел
Циклический алгоритм обработки массива чисел Понятие и основные задачи информатики
Понятие и основные задачи информатики Web-дизайн и разработка мультимедийных изданий
Web-дизайн и разработка мультимедийных изданий Презентация к аттестации учителя информатики
Презентация к аттестации учителя информатики Как мы будем учиться дистанционно?
Как мы будем учиться дистанционно? Графические возможности языка Паскаль
Графические возможности языка Паскаль Развития ПО для автоматизации бизнес - процессов
Развития ПО для автоматизации бизнес - процессов Методология моделирования. Системный анализ
Методология моделирования. Системный анализ Объекты операционной и файловой системы
Объекты операционной и файловой системы Информационные ресурсы и сервисы интернета. Коммуникационные технологии
Информационные ресурсы и сервисы интернета. Коммуникационные технологии Технологии образования. Виды информации
Технологии образования. Виды информации Защита информации
Защита информации Виды мошенничества в интернете
Виды мошенничества в интернете Информационные ресурсы интернета
Информационные ресурсы интернета Создание запросов Access
Создание запросов Access