- Цифровая обработка сигналов

Содержание
- 2. Цифровая обработка сигналов «Цифровая обработка сигналов» Алешин Анатолий Васильевич КТСО-02-15 7 семестр Лекций 32 ч Лаборатории
- 3. Цифровая обработка сигналов В результате изучения дисциплины «Цифровая обработка сигналов» студент должен: знать: основные цели и
- 4. Цифровая обработка сигналов Модели сигналов и задачи цифровой обработки сигналов. Принципы анализа непрерывных и дискретных сигналов
- 5. 1. Курячий М.И. К93 Цифровая обработка сигналов : учеб. пособие для вузов / М.И. Курячий. –
- 6. 1. Бушнев Д.В., Романов А.В. Теоретические основы цифровой обработки сигналов: Учеб. пособие. Воронеж: Воронеж. гос. техн.
- 7. Лекция 1 Сигналы импульсные и периодические, их свойства Сигнал является физическим носителем сообщения Слово „сигнал" может
- 8. Описание сигналов Разложение сигнала на суммируемые (аддитивные) составляющие особенно полезно для изучения систем, выполняющих линейные операции
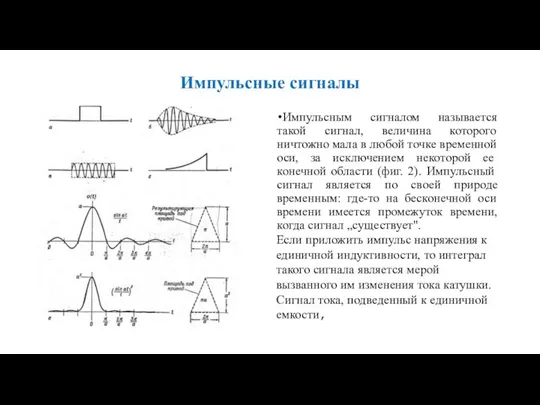
- 9. Импульсные сигналы Импульсным сигналом называется такой сигнал, величина которого ничтожно мала в любой точке временной оси,
- 10. Периодические сигналы Периодическим называется сигнал, периодически повторяющийся через регулярные интервалы времени (фиг. 4). Периодический сигнал можно
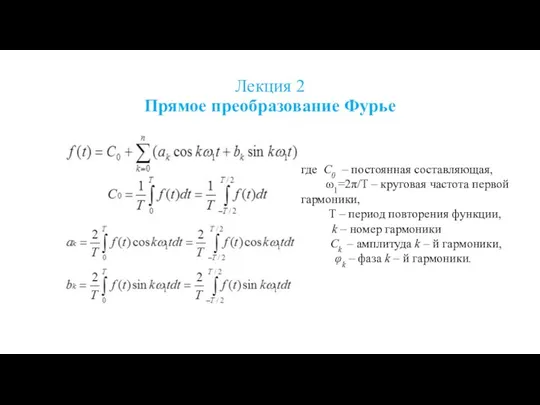
- 11. Лекция 2 Прямое преобразование Фурье где C0 – постоянная составляющая, ω1=2π/T – круговая частота первой гармоники,
- 12. Расчет гармонических составляющих где N – число дискретных отсчетов на периоде [0,T] исследуемой функции f(t) Δt
- 13. Комплексная форма сигнала Для периодических сигналов с ограниченным спектром мощность находится по формуле: Переход к комплексной
- 14. Лекция 2 Прямое преобразование Фурье. Программная реализация ''Вычисление спектральных составляющих СуммКвСост = 0 Римп = (Длит
- 15. Программная реализация 'Спектр фаз ФазСп() If АСп(i) = 0 Then ФазСп(i) = 0 Else ФазСп(i) =
- 16. Параметры сигнала Период повторения 1000 мксек Длительность 500 мксек Сигнал прямоугольной формы и его спектр
- 17. Программная реализация сигнала прямоугольной формы For i = 0 To ЧислТочНаПериод - 1 If Задерж >=
- 18. Периодический сигнал прямоугольной формы и его спектр Параметры сигнала Период повторения 1600 мксек Длительность 1200 мксек
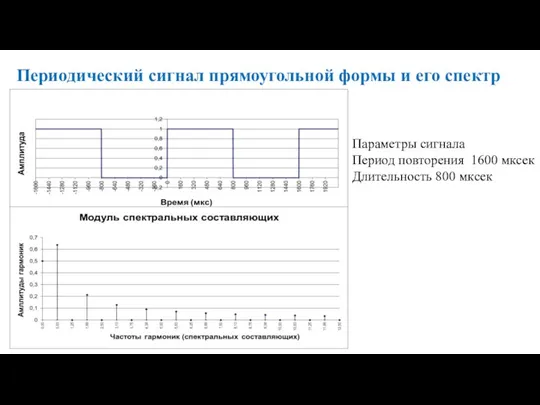
- 19. Периодический сигнал прямоугольной формы и его спектр Параметры сигнала Период повторения 1600 мксек Длительность 800 мксек
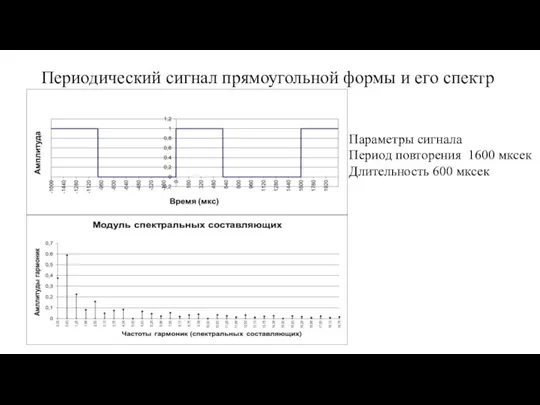
- 20. Периодический сигнал прямоугольной формы и его спектр Параметры сигнала Период повторения 1600 мксек Длительность 600 мксек
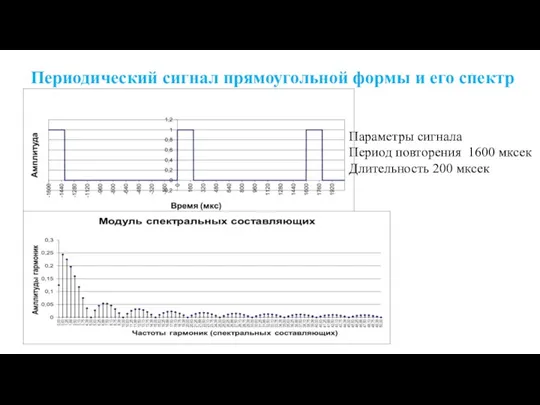
- 21. Периодический сигнал прямоугольной формы и его спектр Параметры сигнала Период повторения 1600 мксек Длительность 200 мксек
- 22. Периодический сигнал Параметры сигнала Период повторения 1600 мксек Длительность 100 мксек
- 23. Лекция 3 Периодический сигнал трапециевидной формы
- 24. Лекция 3 Периодический сигнал трапециевидной формы Трапеция T1=20 T2=50 T3=20 Параметры сигнала Период повторения 200 мксек
- 25. Программная реализация сигнала 'Заголовки колонок Sheets(2).Cells(1, 1).Value = "Время"Sheets(2).Cells(1, 2).Value = "Задерж сигн" Sheets(2).Cells(1, 3).Value =
- 26. 'Мощность сигнала Pсигн Pсигн = 0 For i = 0 To ЧислТочНаПериод - 1 t =
- 27. Периодический сигнал вида Sin(ωs t)
- 28. Импульс вида u = Sin(ωs t) 'Задерж Mod Период - остаток от деления If Abs(Задерж) >
- 29. Периодический сигнал вида u = 1 - Cos(ωs t)
- 30. For i = 0 To ЧислТочНаПериод - 1 t = i * ШагВр 'Если задержка меньше
- 31. Лекция 4 Модулированные сигналы Используемые виды модуляции при передаче сигналов Амплитудная модуляция Частотная модуляция Фазовая модуляция
- 32. Амплитудно - модулированная последовательность прямоугольных импульсов Частота несущей 0,03 мГц Длительность импульса 500 мкс Период повторения
- 33. Программная реализация АМ сигнала 'Частота несущей f0 = ЧислПериодов / ЧислоТочекНаИнт 'Шаг для вычисления значений несущей
- 34. АМ сигнал Частота несущей =0,02 Частота сигнала=0,002
- 35. Программная реализация АМ сигнала Sin(ωs t) 'Частота несущей f0 = ЧислПериодов / ЧислоТочекНаИнт 'Частота огибающей fсигн
- 36. Частотно модулированная последовательность прямоугольных импульсов Частота несущей 0,04 мГц Длительность импульса 500 мкс Период повторения импульсов
- 37. Частотно модулированная последовательность прямоугольных импульсов. Программная реализация 'Частота несущей f0 = ЧислПериодов / ЧислоТочекНаИнт 'Шаг для
- 38. Частотная модуляция сигналом вида Sin(ωs t)
- 39. Программная реализация 'Частота несущей f0 = ЧислПериодов / ЧислоТочекНаИнт 'Частота сигнала fс = 0.05 * f0
- 40. Частотная модуляция Частота несущей 0,04 мГц
- 41. Лекция 5 Обратное преобразование Фурье Восстановление сигнала по ограниченному спектру
- 42. Обратное преобразование Фурье Восстановление сигнала по ограниченному спектру 'Вычисление сумм спектральных составляющих For j = 0
- 43. Восстановление сигнала по ограниченному числу гармоник Исходный сигнал Период 1000 мксек Длительность 500 мксек Сумма гармоник
- 44. Восстановление сигнала по ограниченному числу гармоник Исходный сигнал Период 1000 мксек Длительность 250 мксек Сумма гармоник
- 45. Восстановление сигнала по ограниченному числу гармоник Исходный сигнал Период 1000 мксек Длительность 250 мксек Сумма гармоник
- 46. Восстановление сигнала по ограниченному числу гармоник. Сигнал трапеция
- 47. Сигнал после полосового фильтра
- 48. Сигнал - полупериод Sin(t)
- 49. Сигнал - период 1- Cos(ωs t)
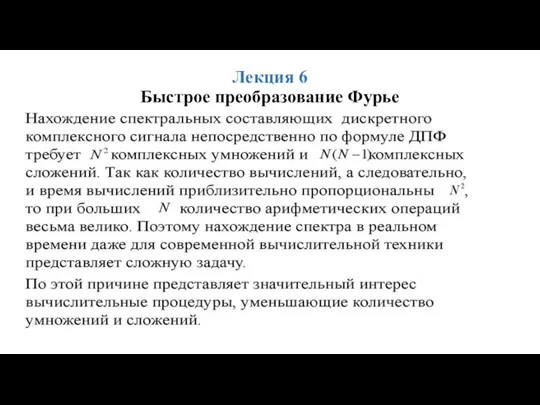
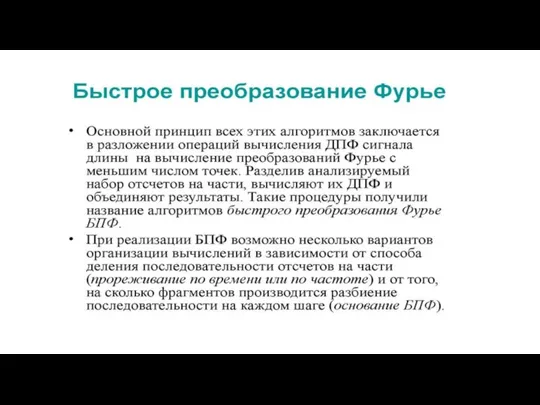
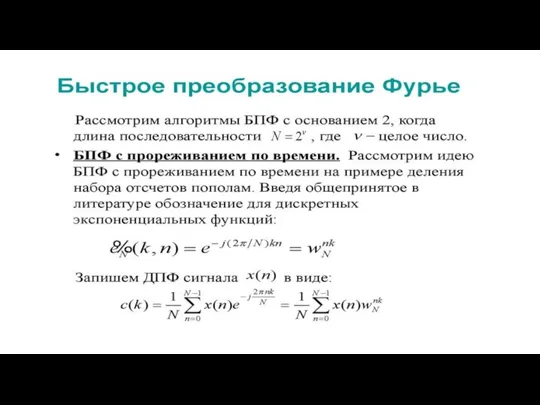
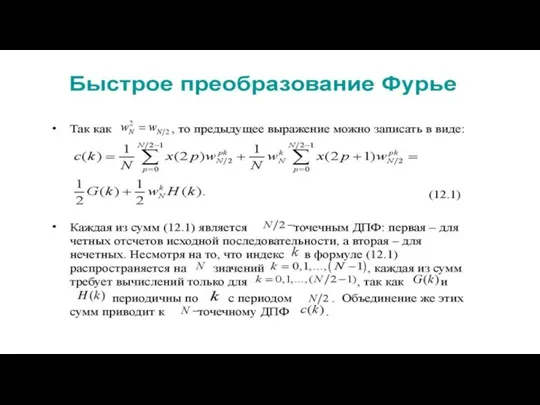
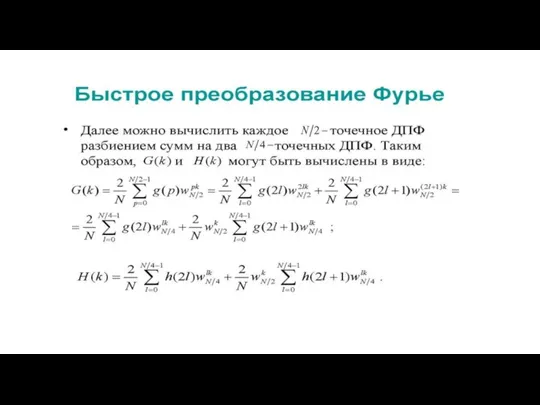
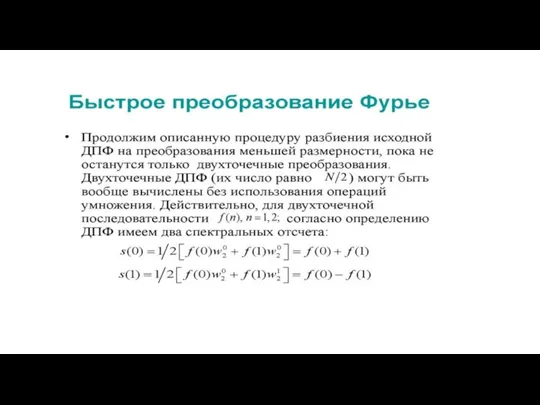
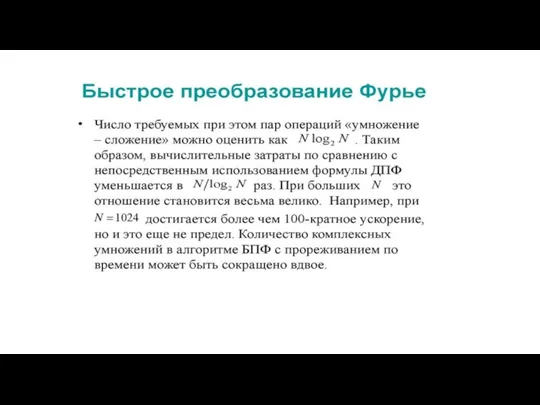
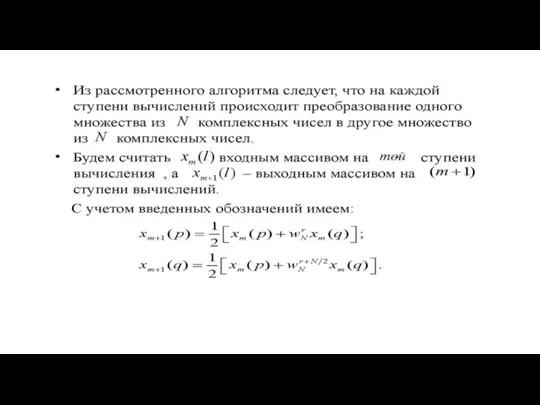
- 50. Лекция 6 Быстрое преобразование Фурье
- 60. Лекция 7 Имитация шумового воздействия в заданном диапазоне частот При передаче сигнала по каналам связи в
- 61. Основные положения метода моделирования Шумовое воздействие формируется как сумма гармонических колебаний со случайной частотой и фазой
- 62. Автокорреляционная функция Поскольку в методе генерации шумового воздействия используются гармонические составляющие со случайной частотой в ограниченном
- 63. Моделирование шумового воздействия в заданном диапазоне частот
- 64. Программная реализация выбора случайных параметров 'Генерация случайных парметров Randomize (-8) 'ШагД вводится для более равномерного распределения
- 65. Вычисление суммы спектральных составляющих 'Вычисление суммы составляющих на рабочем интервале ReDim Пр(ЧислТочПр) As Single For j
- 66. Формирование шумового воздействия
- 67. Простейшая помеха
- 68. Имитация двух частотного шумового воздействия
- 69. Сумма 5 помеховых воздействий
- 70. Сумма 10 помеховых воздействий
- 71. Сумма 20 помеховых воздействий
- 72. Сумма 50 помеховых воздействий
- 73. Сумма 50 помеховых воздействий
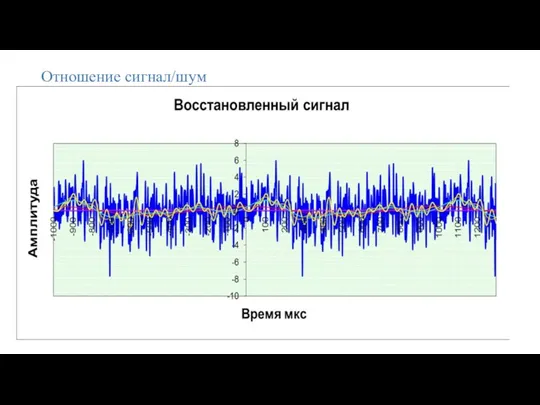
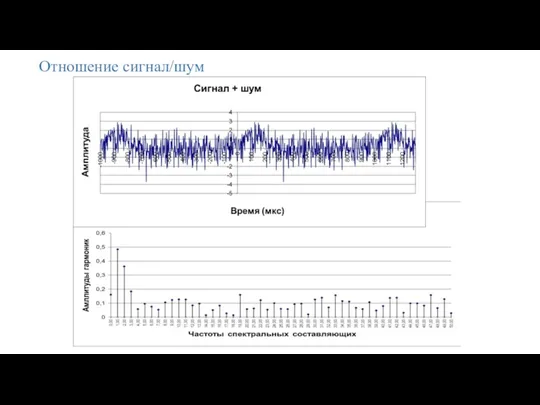
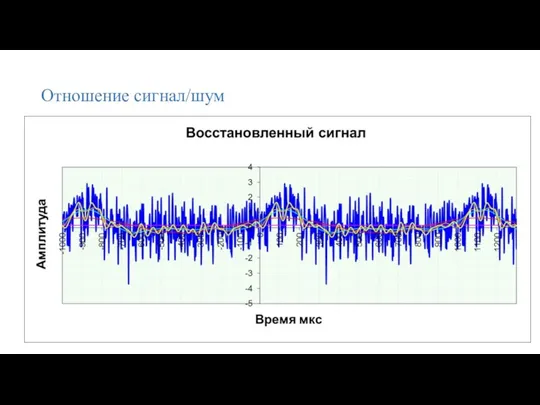
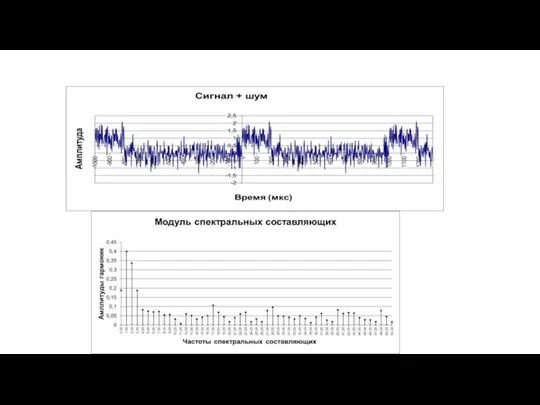
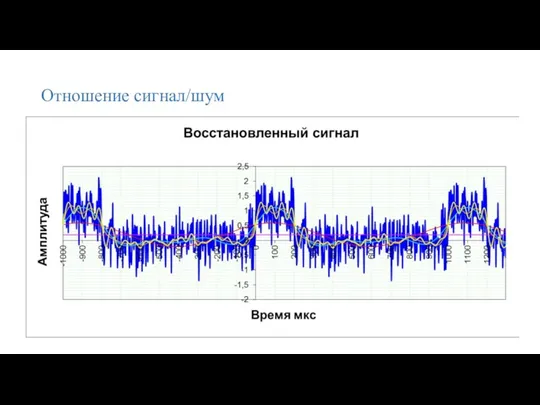
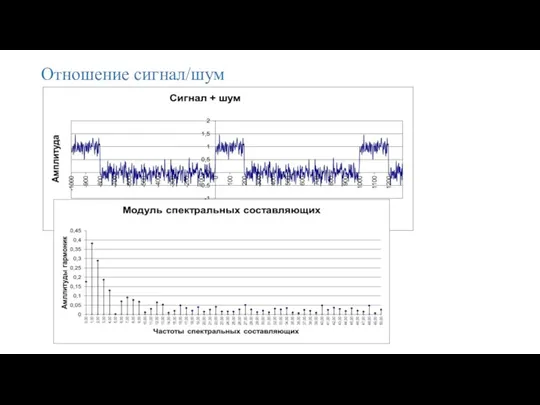
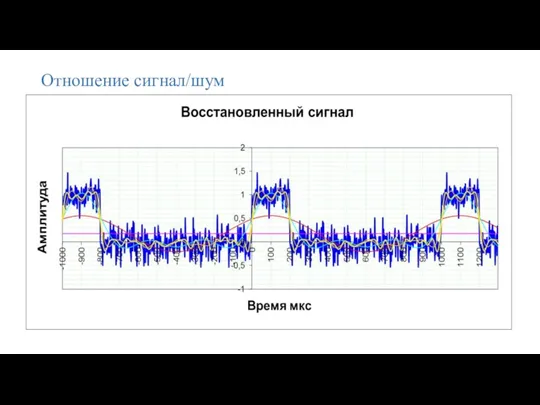
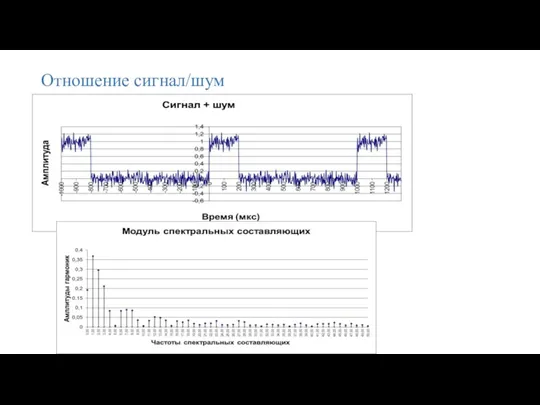
- 74. Лекция 8 Выделение сигнала из шума
- 75. Отношение сигнал/шум
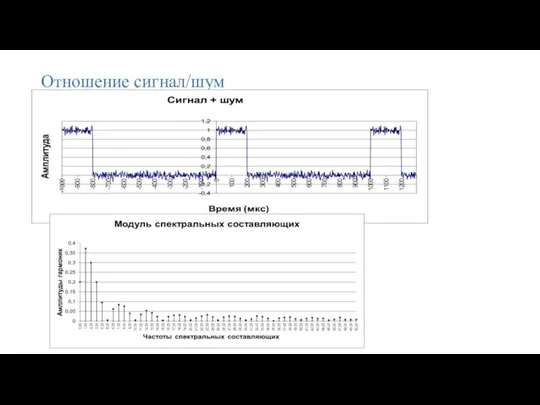
- 76. Отношение сигнал/шум
- 77. Отношение сигнал/шум
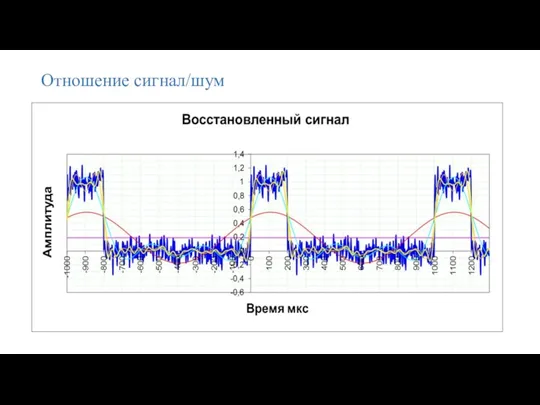
- 78. Отношение сигнал/шум
- 80. Отношение сигнал/шум
- 81. Отношение сигнал/шум
- 82. Отношение сигнал/шум
- 83. Отношение сигнал/шум
- 84. Отношение сигнал/шум
- 85. Отношение сигнал/шум
- 86. Лекция 8 ЦАП и АЦП в системе цифровой обработки сигнала Цифровая фильтрация является одним из наиболее
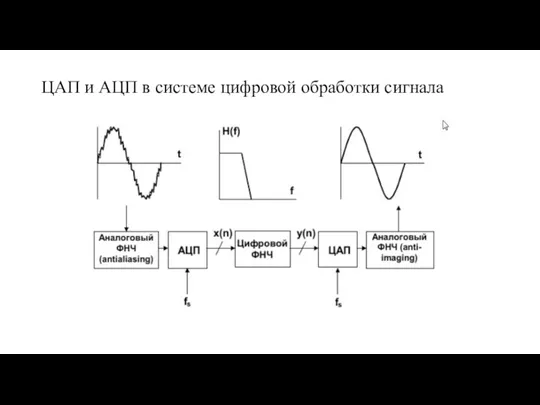
- 87. ЦАП и АЦП в системе цифровой обработки сигнала
- 88. Цифроаналоговые преобразователи Параллельные АЦП - построены на принципе одновременного преобразования входного сигнала путем его сравнения с
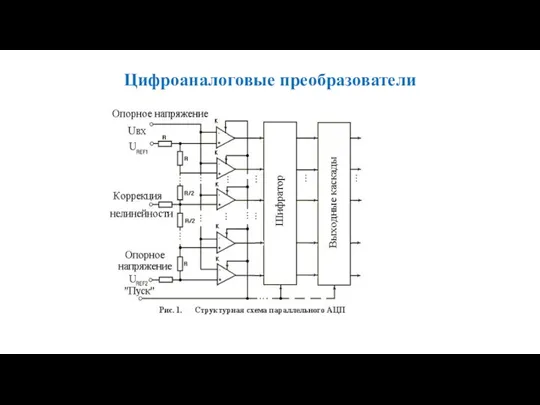
- 89. Цифроаналоговые преобразователи
- 90. Параллельные АЦП Tакой АЦП работает следующим образом: входной сигнал подается одновременно на одни входы компараторов К,
- 91. АЦП последовательного двоично-взвешенного приближения
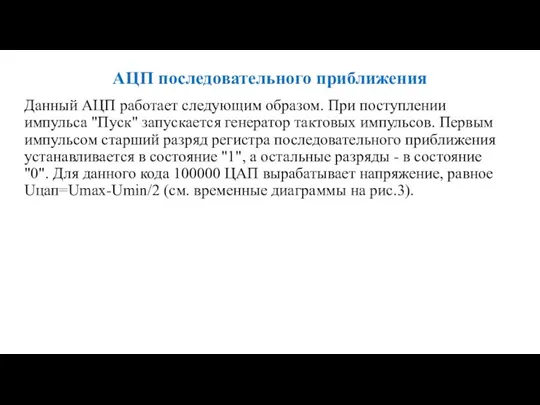
- 92. АЦП последовательного приближения Данный АЦП работает следующим образом. При поступлении импульса "Пуск" запускается генератор тактовых импульсов.
- 93. АЦП последовательного приближения
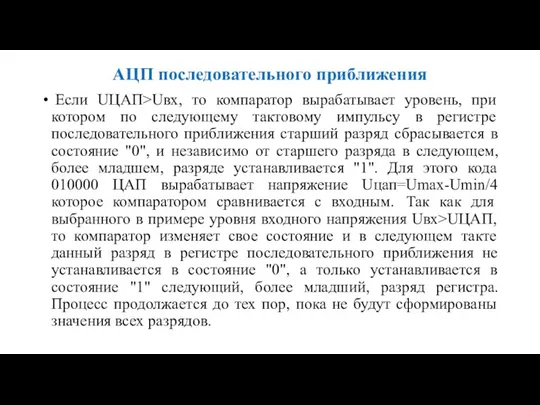
- 94. АЦП последовательного приближения Если UЦАП>Uвх, то компаратор вырабатывает уровень, при котором по следующему тактовому импульсу в
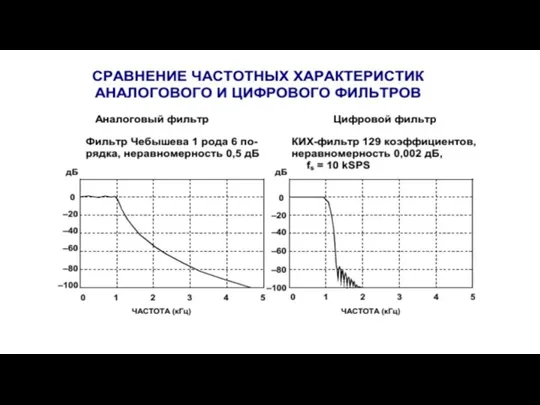
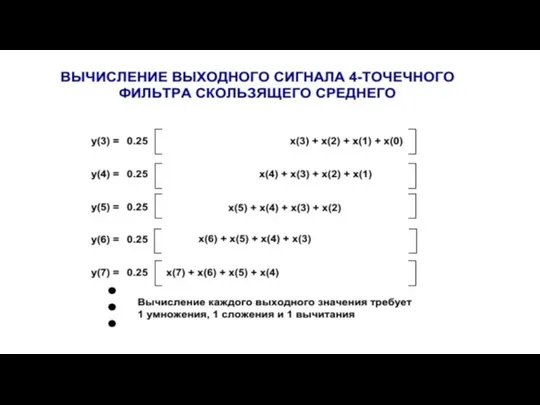
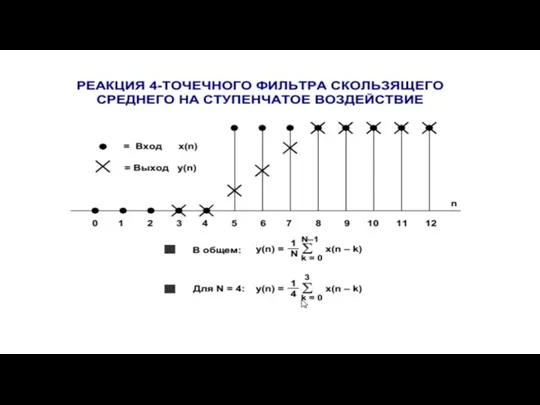
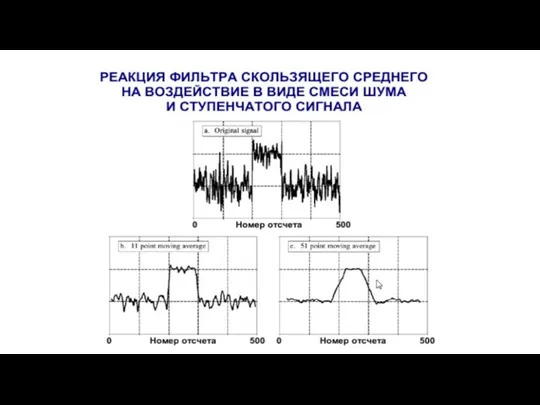
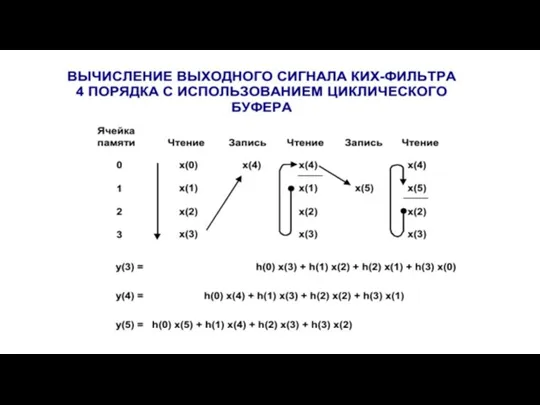
- 95. Лекция 9 Цифровая фильтрация Цифровая фильтрация является одним из наиболее мощных инструментальных средств ЦОС. Кроме очевидных
- 104. Лекция 10
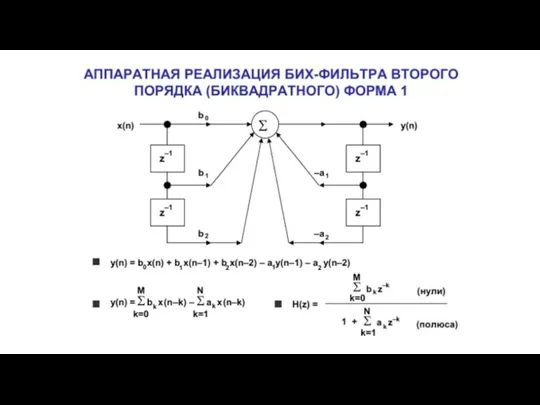
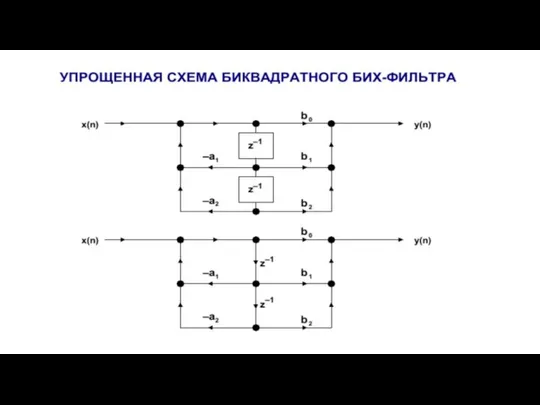
- 107. Лекция 11 ФИЛЬТРЫ С БЕСКОНЕЧНОЙ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКОЙ (БИХ) Как было упомянуто ранее, КИХ-фильтры не имеют реальных
- 108. БИХ-фильтры БИХ-фильтры получили такое название, потому что их импульсные характеристики растянуты на бесконечном временном интервале. Это
- 112. Лекция 12 Аналоговые фильтры В дискретных системах, даже с высокой степенью избыточной дискретизации, требуется наличие аналоговых
- 114. Принципиальная электрическая схема аналогового фильтра.
- 115. Схема замещения операционного усилителя (полная и упрощенная)
- 116. Эквивалентная схема аналогового фильтра 0, 1, 2, 3, 4, 5 – электрические узлы схемы
- 117. Множество ветвей – дерево, множество звеньев
- 118. Порядок построения сигнального графа по эквивалентной схеме
- 119. Граф – модель аналогового фильтра
- 120. Графовая модель аналогового фильтра после преобразования
- 121. Коэффициент передачи µ µ= −µоу (Z2*Z4)/(Z1*Z3* Δ) где: Δ= 1-(L1+L2+L3+L4+L5+L6+L7+L8+L9) +(( L1* L3)+(L1* L4)+(L1* L6)+(L1* L7)+(L1*L8)+
- 122. Значения L1 …. L9 определяются L1=-Z2/ Z1 L2=-Z2/ Z3 L3=-Zэкв/ Z3 L4=-Zэкв/Z4 L5=- Z2/ Z5 L6=-
- 123. Лекция 13 Аналоговые фильтры Фильтр верхних частот второго порядка
- 124. Полосовой фильтр второго порядка
- 125. Активный заграждающий фильтр с двойным Т-образным мостом
- 126. Активный фильтр нижних частот второго порядка
- 127. Передаточные функции различных аналоговых фильтров
- 128. Лекция 14 Системы передачи информации Система передачи информации — совокупность технических средств (передатчик, приемник, линия связи),
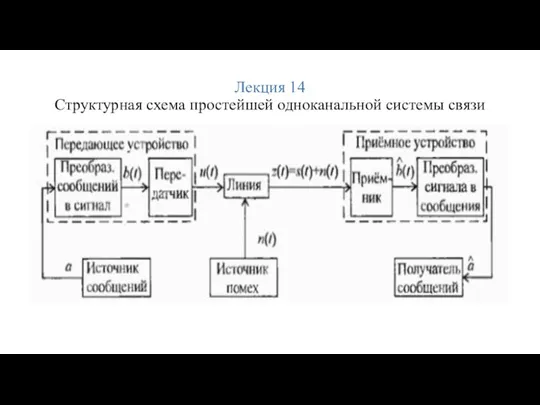
- 129. Лекция 14 Структурная схема простейшей одноканальной системы связи
- 130. Среда передачи или физическая среда - материальная субстанция, через которую осуществляется распространение сигналов.
- 131. В узком смысле под термином линия подразумевается физическая среда, по которой передаются сигналы между двумя конечными
- 132. Основные характеристики канала связи К основным характеристикам канала (линии) связи, существенно влияющим на качество передачи сигнала,
- 133. Полоса пропускания Полоса – диапазон частот, в пределах которого амплитудно-частотная пропускания характеристика (АЧХ) канала (линии) связи
- 134. Ширина полосы пропускания Ширина полосы пропускания существенным образом влияет на максимально возможную скорость передачи информации по
- 135. Ширина полосы пропускания Сигналы составлены из большого набора гармоник, однако приемник может получить лишь те гармоники,
- 136. Искажение сигнала при уменьшении полосы пропускания
- 137. Затухание При передаче сигнала по каналу связи, происходит его постепенное ослабление (затухание), что обусловлено физическими и
- 138. Затухание Затухание характерно как для аналоговых, так и для цифровых сигналов. Оно увеличивается с ростом частоты
- 139. Помехоустойчивость В реальном канале связи существуют помехи, обусловленные характеристиками среды передачи, каналообразующей аппаратуры, влиянием электромагнитных полей
- 140. Помехи В зависимости от источника возникновения и от характера их воздействия помехи делятся на внутренние, внешние
- 141. Помехи Радиопомехи (радиочастотная интерференция, возникают от излучения радиостанций различного назначения, спектр которых по каким-либо причинам накладывается
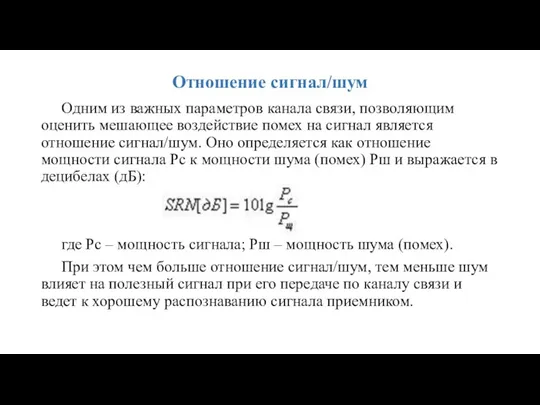
- 142. Отношение сигнал/шум Одним из важных параметров канала связи, позволяющим оценить мешающее воздействие помех на сигнал является
- 144. Скачать презентацию
Цифровая обработка сигналов
«Цифровая обработка сигналов»
Алешин Анатолий Васильевич
КТСО-02-15 7 семестр
Лекций 32
Цифровая обработка сигналов
«Цифровая обработка сигналов»
Алешин Анатолий Васильевич
КТСО-02-15 7 семестр
Лекций 32
Цифровая обработка сигналов
В результате изучения дисциплины «Цифровая обработка сигналов» студент должен:
знать: основные
Цифровая обработка сигналов
В результате изучения дисциплины «Цифровая обработка сигналов» студент должен:
знать: основные
Цифровая обработка сигналов
Модели сигналов и задачи цифровой обработки сигналов.
Принципы анализа непрерывных
Цифровая обработка сигналов
Модели сигналов и задачи цифровой обработки сигналов.
Принципы анализа непрерывных
1. Курячий М.И. К93 Цифровая обработка сигналов : учеб. пособие для
1. Курячий М.И. К93 Цифровая обработка сигналов : учеб. пособие для
1. Бушнев Д.В., Романов А.В. Теоретические основы цифровой обработки сигналов: Учеб.
1. Бушнев Д.В., Романов А.В. Теоретические основы цифровой обработки сигналов: Учеб.
Лекция 1
Сигналы импульсные и периодические, их свойства
Сигнал является физическим носителем сообщения
Лекция 1
Сигналы импульсные и периодические, их свойства
Сигнал является физическим носителем сообщения
Описание сигналов
Разложение сигнала на суммируемые (аддитивные) составляющие особенно полезно для изучения
Описание сигналов
Разложение сигнала на суммируемые (аддитивные) составляющие особенно полезно для изучения
Импульсные сигналы
Импульсным сигналом называется такой сигнал, величина которого ничтожно мала в
Импульсные сигналы
Импульсным сигналом называется такой сигнал, величина которого ничтожно мала в
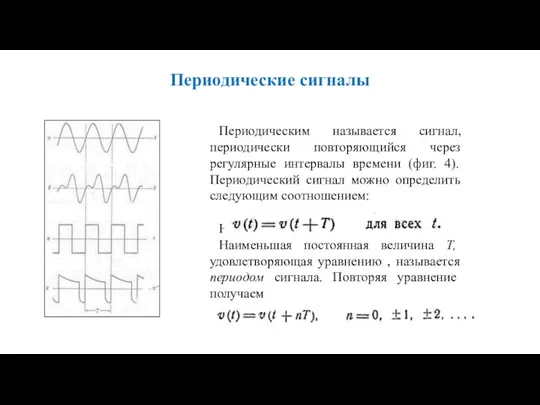
Периодические сигналы
Периодическим называется сигнал, периодически повторяющийся через регулярные интервалы времени (фиг.
Периодические сигналы
Периодическим называется сигнал, периодически повторяющийся через регулярные интервалы времени (фиг.
Лекция 2
Прямое преобразование Фурье
где C0 – постоянная составляющая,
ω1=2π/T –
Лекция 2
Прямое преобразование Фурье
где C0 – постоянная составляющая,
ω1=2π/T –
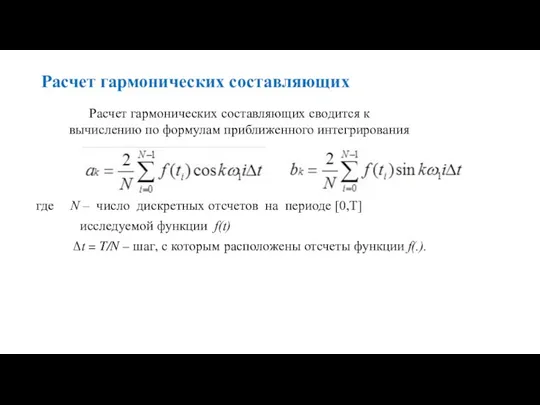
Расчет гармонических составляющих
где N – число дискретных отсчетов на периоде [0,T]
Расчет гармонических составляющих
где N – число дискретных отсчетов на периоде [0,T]
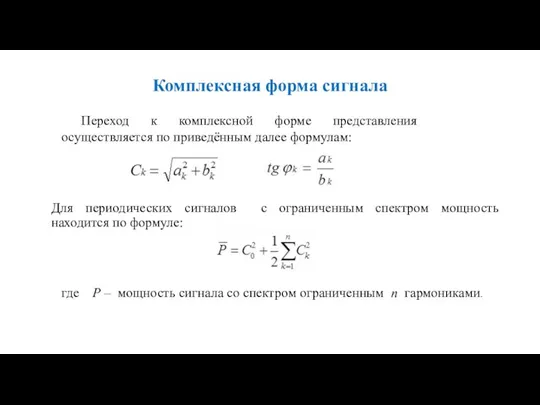
Комплексная форма сигнала
Для периодических сигналов с ограниченным спектром мощность находится по
Комплексная форма сигнала
Для периодических сигналов с ограниченным спектром мощность находится по
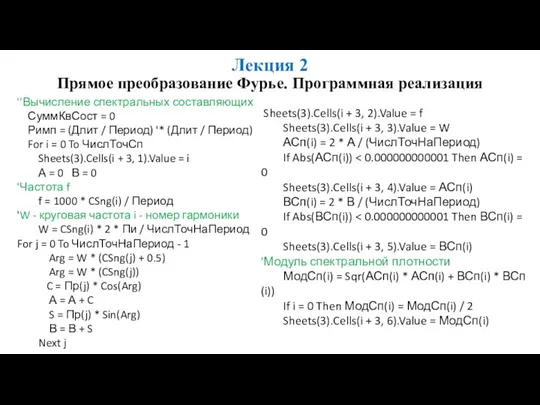
Лекция 2
Прямое преобразование Фурье. Программная реализация
''Вычисление спектральных составляющих
СуммКвСост =
Лекция 2
Прямое преобразование Фурье. Программная реализация
''Вычисление спектральных составляющих
СуммКвСост =
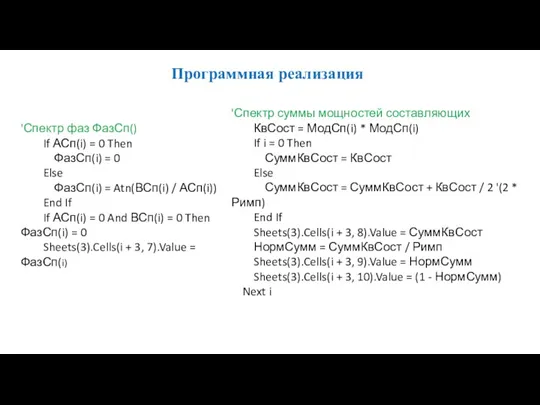
Программная реализация
'Спектр фаз ФазСп()
If АСп(i) = 0 Then
ФазСп(i) =
Программная реализация
'Спектр фаз ФазСп()
If АСп(i) = 0 Then
ФазСп(i) =
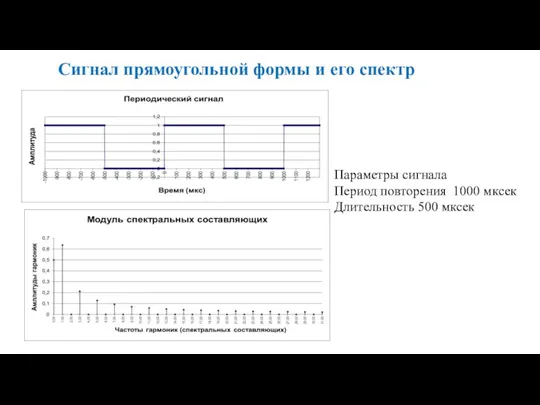
Параметры сигнала
Период повторения 1000 мксек
Длительность 500 мксек
Сигнал прямоугольной формы и его
Параметры сигнала
Период повторения 1000 мксек
Длительность 500 мксек
Сигнал прямоугольной формы и его
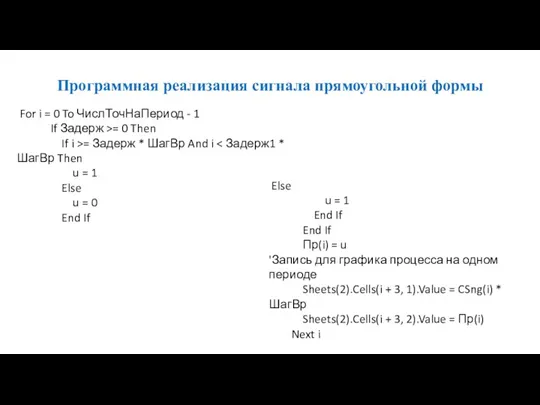
Программная реализация сигнала прямоугольной формы
For i = 0 To ЧислТочНаПериод
Программная реализация сигнала прямоугольной формы
For i = 0 To ЧислТочНаПериод
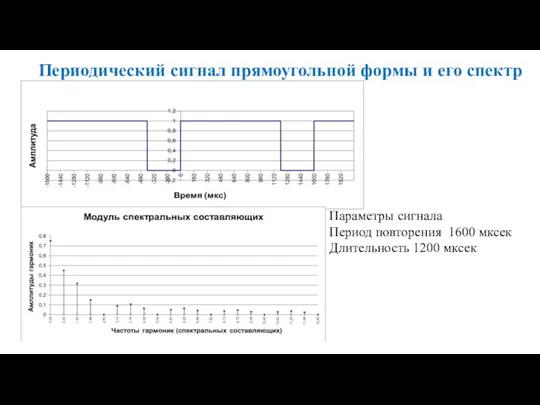
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
Периодический сигнал прямоугольной формы и его спектр
Параметры сигнала
Период повторения 1600 мксек
Длительность
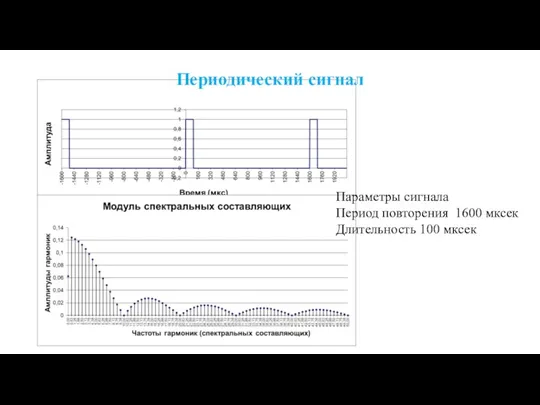
Периодический сигнал
Параметры сигнала
Период повторения 1600 мксек
Длительность 100 мксек
Периодический сигнал
Параметры сигнала
Период повторения 1600 мксек
Длительность 100 мксек
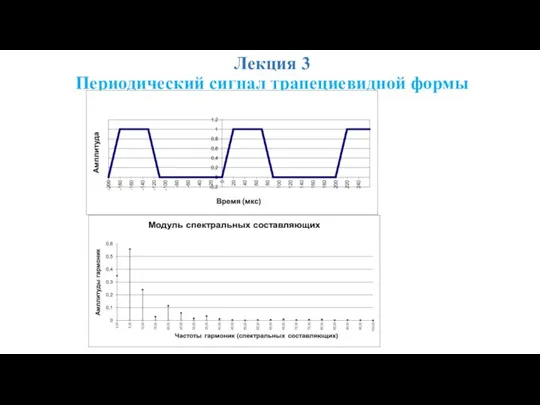
Лекция 3
Периодический сигнал трапециевидной формы
Лекция 3
Периодический сигнал трапециевидной формы
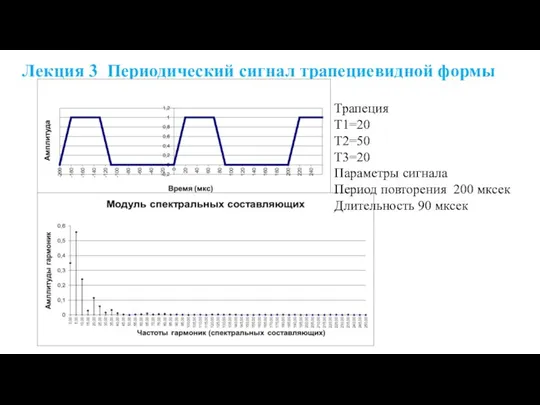
Лекция 3 Периодический сигнал трапециевидной формы
Трапеция
T1=20
T2=50
T3=20
Параметры сигнала
Период повторения 200 мксек
Длительность 90
Лекция 3 Периодический сигнал трапециевидной формы
Трапеция
T1=20
T2=50
T3=20
Параметры сигнала
Период повторения 200 мксек
Длительность 90
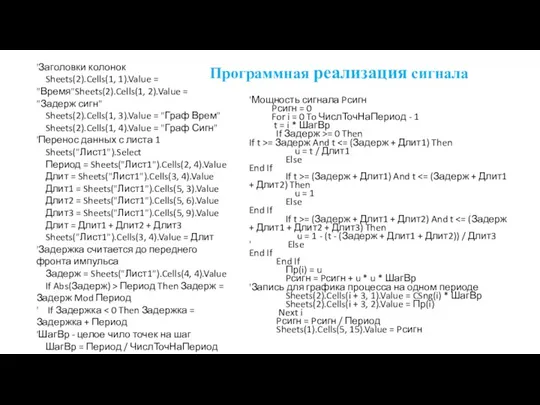
Программная реализация сигнала
'Заголовки колонок
Sheets(2).Cells(1, 1).Value = "Время"Sheets(2).Cells(1, 2).Value = "Задерж
Программная реализация сигнала
'Заголовки колонок
Sheets(2).Cells(1, 1).Value = "Время"Sheets(2).Cells(1, 2).Value = "Задерж
'Мощность сигнала Pсигн
Pсигн = 0
For i = 0 To
'Мощность сигнала Pсигн
Pсигн = 0
For i = 0 To
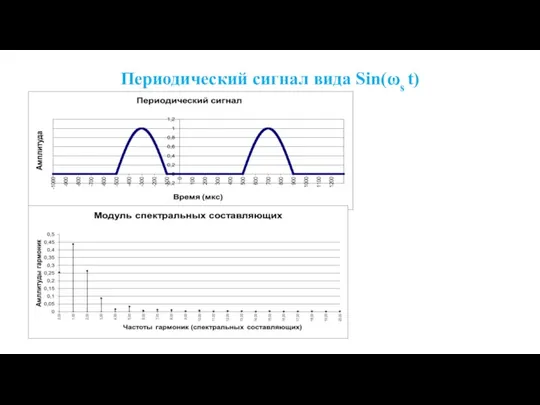
Периодический сигнал вида Sin(ωs t)
Периодический сигнал вида Sin(ωs t)
Импульс вида u = Sin(ωs t)
'Задерж Mod Период - остаток от
Импульс вида u = Sin(ωs t)
'Задерж Mod Период - остаток от
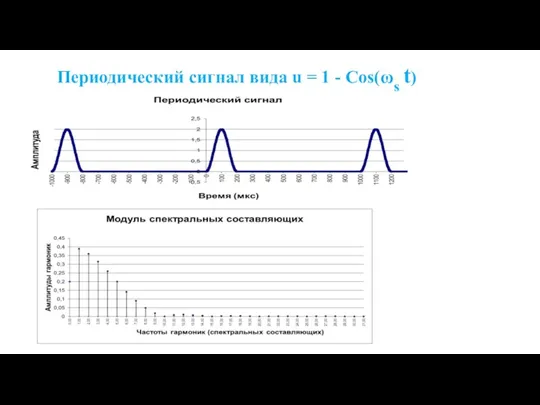
Периодический сигнал вида u = 1 - Cos(ωs t)
Периодический сигнал вида u = 1 - Cos(ωs t)
For i = 0 To ЧислТочНаПериод - 1
t =
For i = 0 To ЧислТочНаПериод - 1
t =
Лекция 4
Модулированные сигналы
Используемые виды модуляции при передаче сигналов
Амплитудная модуляция
Частотная
Лекция 4
Модулированные сигналы
Используемые виды модуляции при передаче сигналов
Амплитудная модуляция
Частотная
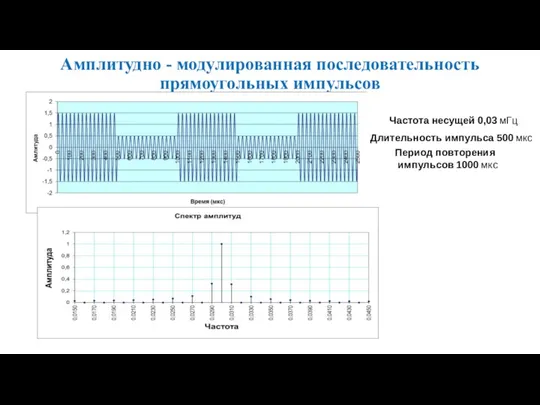
Амплитудно - модулированная последовательность прямоугольных импульсов
Частота несущей 0,03 мГц
Длительность
Амплитудно - модулированная последовательность прямоугольных импульсов
Частота несущей 0,03 мГц
Длительность
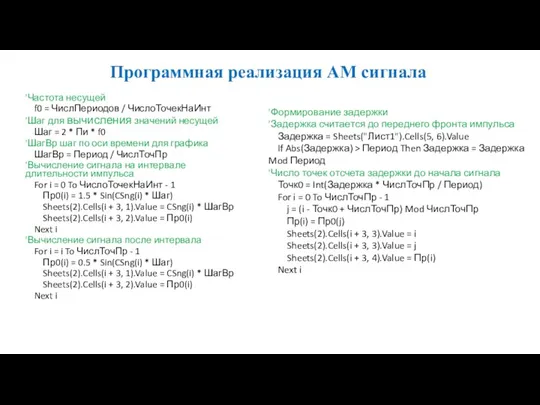
Программная реализация АМ сигнала
'Частота несущей
f0 = ЧислПериодов / ЧислоТочекНаИнт
'Шаг
Программная реализация АМ сигнала
'Частота несущей
f0 = ЧислПериодов / ЧислоТочекНаИнт
'Шаг
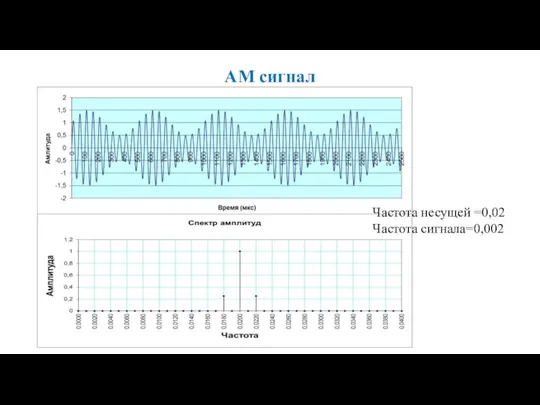
АМ сигнал
Частота несущей =0,02
Частота сигнала=0,002
АМ сигнал
Частота несущей =0,02
Частота сигнала=0,002
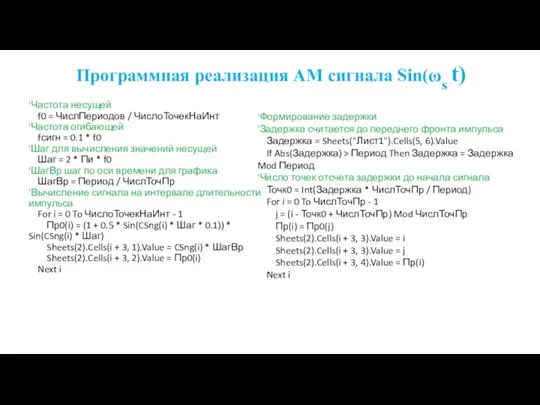
Программная реализация АМ сигнала Sin(ωs t)
'Частота несущей
f0 = ЧислПериодов /
Программная реализация АМ сигнала Sin(ωs t)
'Частота несущей
f0 = ЧислПериодов /
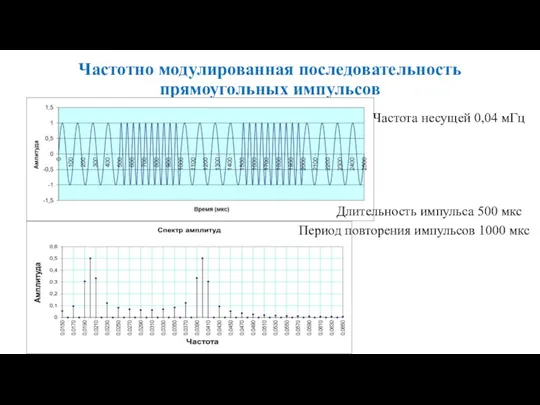
Частотно модулированная последовательность прямоугольных импульсов
Частота несущей 0,04 мГц
Длительность импульса 500 мкс
Частотно модулированная последовательность прямоугольных импульсов
Частота несущей 0,04 мГц
Длительность импульса 500 мкс
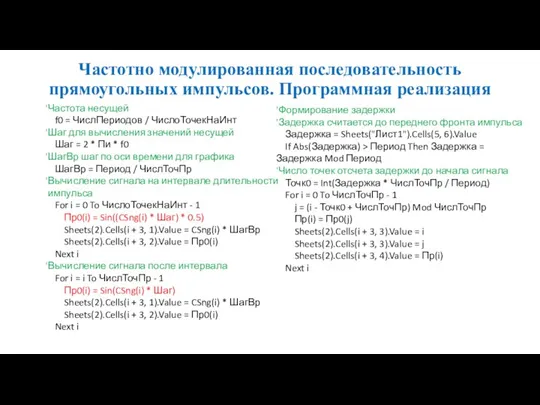
Частотно модулированная последовательность прямоугольных импульсов. Программная реализация
'Частота несущей
f0 =
Частотно модулированная последовательность прямоугольных импульсов. Программная реализация
'Частота несущей
f0 =
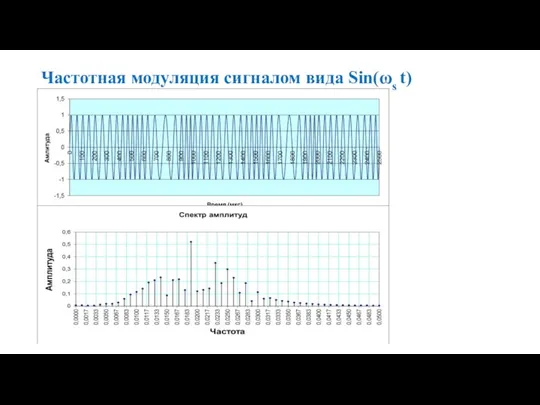
Частотная модуляция сигналом вида Sin(ωs t)
Частотная модуляция сигналом вида Sin(ωs t)
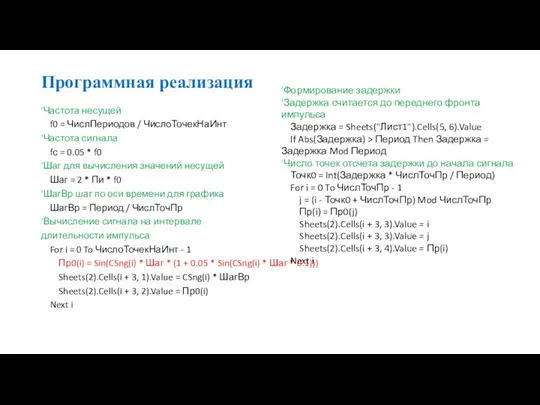
Программная реализация
'Частота несущей
f0 = ЧислПериодов / ЧислоТочекНаИнт
'Частота сигнала
fс =
Программная реализация
'Частота несущей
f0 = ЧислПериодов / ЧислоТочекНаИнт
'Частота сигнала
fс =
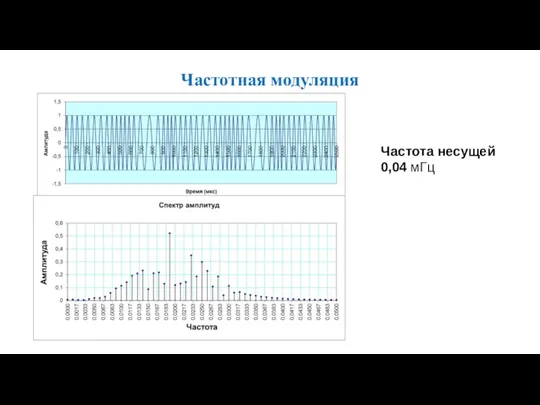
Частотная модуляция
Частота несущей 0,04 мГц
Частотная модуляция
Частота несущей 0,04 мГц
Лекция 5
Обратное преобразование Фурье
Восстановление сигнала по ограниченному спектру
Лекция 5
Обратное преобразование Фурье
Восстановление сигнала по ограниченному спектру
Обратное преобразование Фурье
Восстановление сигнала по ограниченному спектру
'Вычисление сумм спектральных составляющих
For
Обратное преобразование Фурье
Восстановление сигнала по ограниченному спектру
'Вычисление сумм спектральных составляющих
For
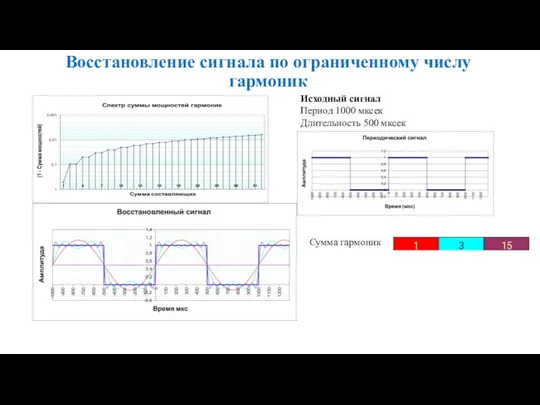
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 500 мксек
Сумма
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 500 мксек
Сумма
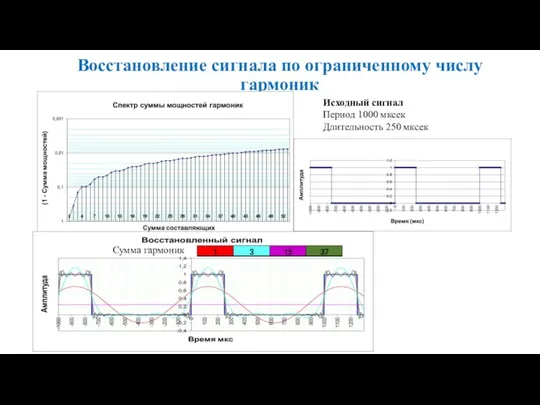
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 250 мксек
Сумма
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 250 мксек
Сумма
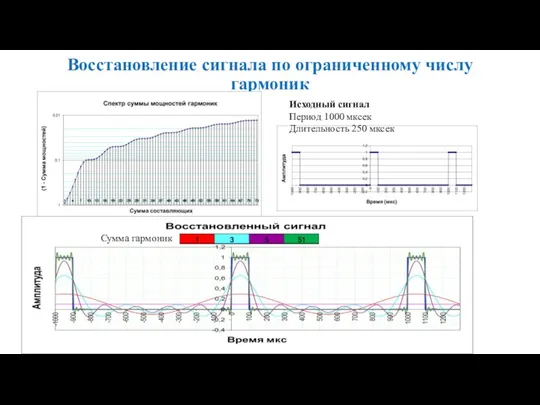
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 250 мксек
Сумма
Восстановление сигнала по ограниченному числу гармоник
Исходный сигнал
Период 1000 мксек
Длительность 250 мксек
Сумма
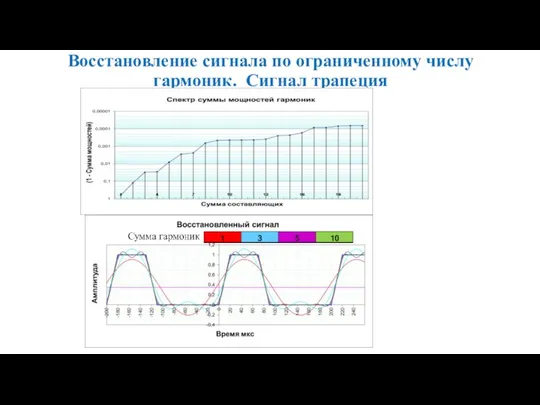
Восстановление сигнала по ограниченному числу гармоник. Сигнал трапеция
Восстановление сигнала по ограниченному числу гармоник. Сигнал трапеция
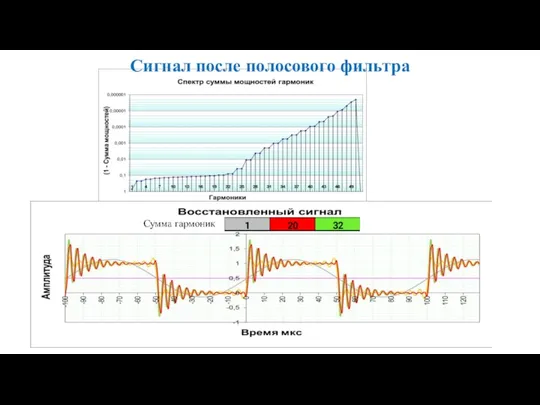
Сигнал после полосового фильтра
Сигнал после полосового фильтра
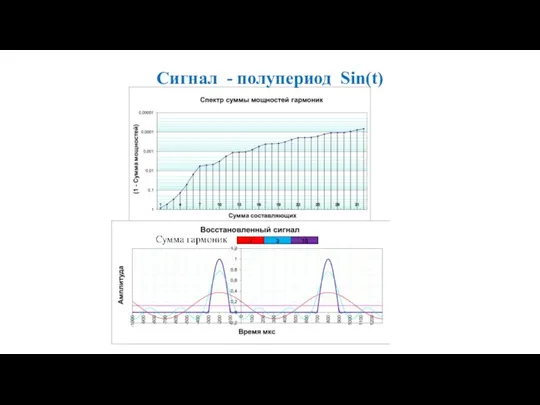
Сигнал - полупериод Sin(t)
Сигнал - полупериод Sin(t)
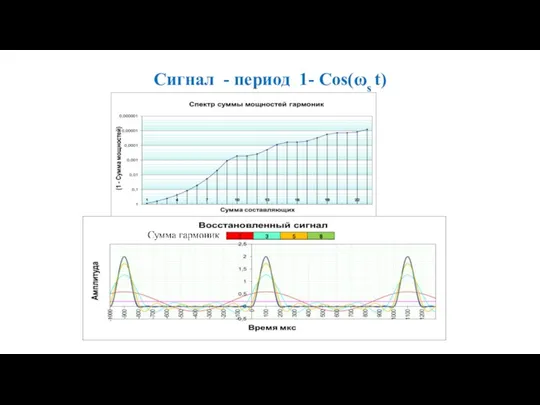
Сигнал - период 1- Cos(ωs t)
Сигнал - период 1- Cos(ωs t)
Лекция 6
Быстрое преобразование Фурье
Лекция 6
Быстрое преобразование Фурье


Лекция 7
Имитация шумового воздействия в заданном диапазоне частот
При передаче сигнала
Лекция 7
Имитация шумового воздействия в заданном диапазоне частот
При передаче сигнала
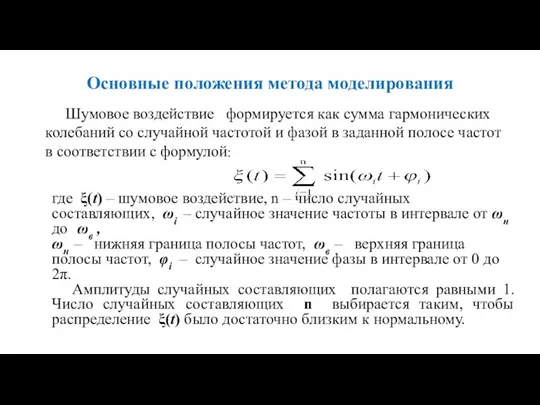
Основные положения метода моделирования
Шумовое воздействие формируется как сумма гармонических колебаний со
Основные положения метода моделирования
Шумовое воздействие формируется как сумма гармонических колебаний со
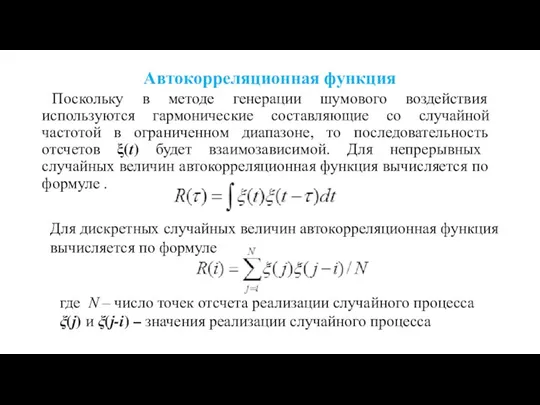
Автокорреляционная функция
Поскольку в методе генерации шумового воздействия используются гармонические составляющие со
Автокорреляционная функция
Поскольку в методе генерации шумового воздействия используются гармонические составляющие со
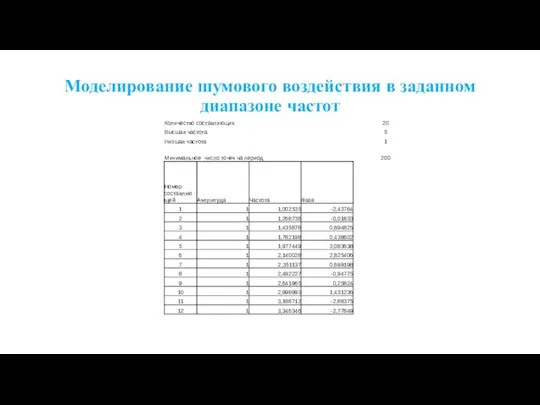
Моделирование шумового воздействия в заданном диапазоне частот
Моделирование шумового воздействия в заданном диапазоне частот
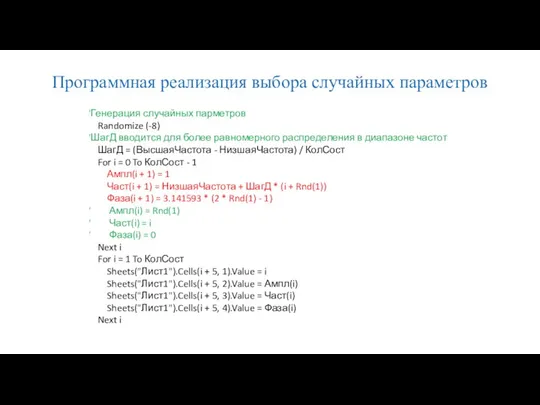
Программная реализация выбора случайных параметров
'Генерация случайных парметров
Randomize (-8)
'ШагД вводится для
Программная реализация выбора случайных параметров
'Генерация случайных парметров
Randomize (-8)
'ШагД вводится для
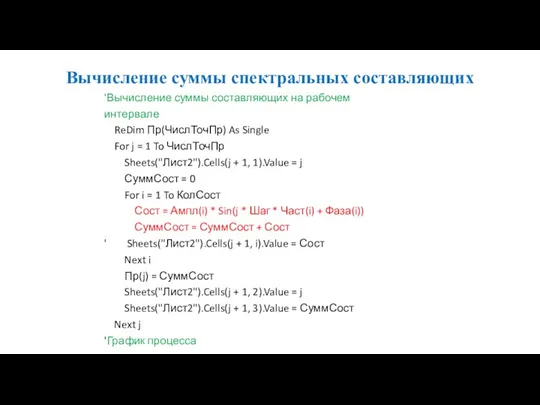
Вычисление суммы спектральных составляющих
'Вычисление суммы составляющих на рабочем интервале
ReDim Пр(ЧислТочПр)
Вычисление суммы спектральных составляющих
'Вычисление суммы составляющих на рабочем интервале
ReDim Пр(ЧислТочПр)
Формирование шумового воздействия
Формирование шумового воздействия
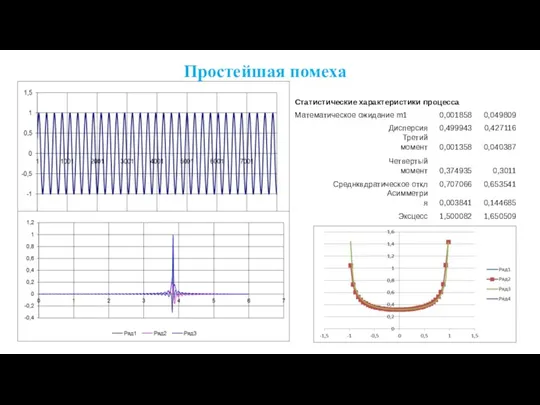
Простейшая помеха
Простейшая помеха
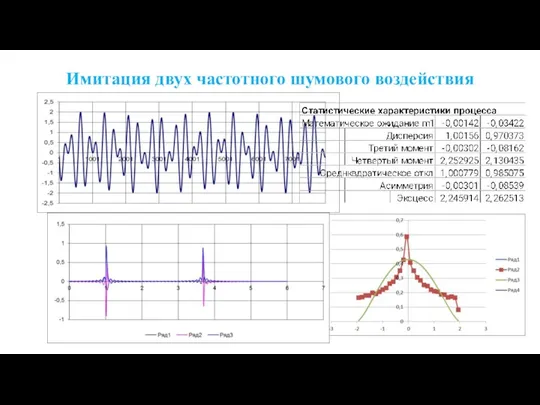
Имитация двух частотного шумового воздействия
Имитация двух частотного шумового воздействия
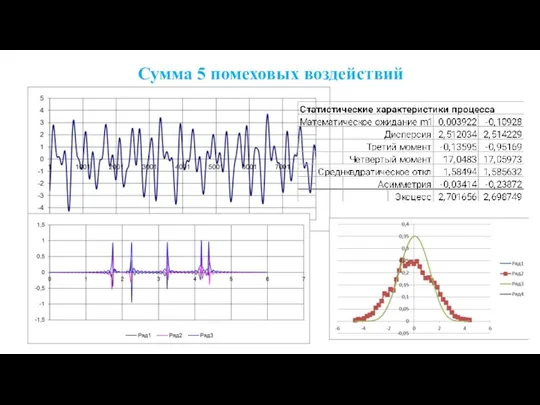
Сумма 5 помеховых воздействий
Сумма 5 помеховых воздействий
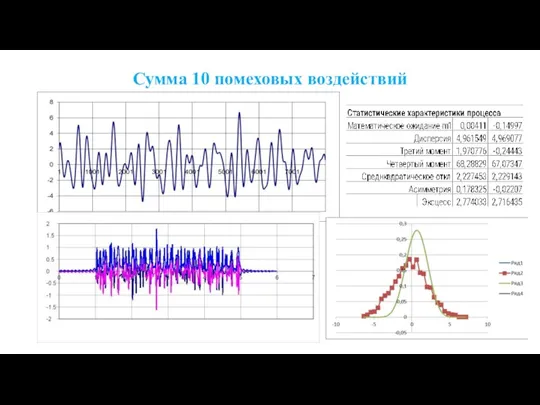
Сумма 10 помеховых воздействий
Сумма 10 помеховых воздействий
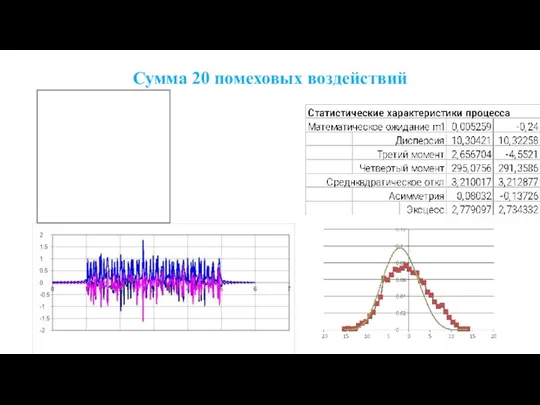
Сумма 20 помеховых воздействий
Сумма 20 помеховых воздействий
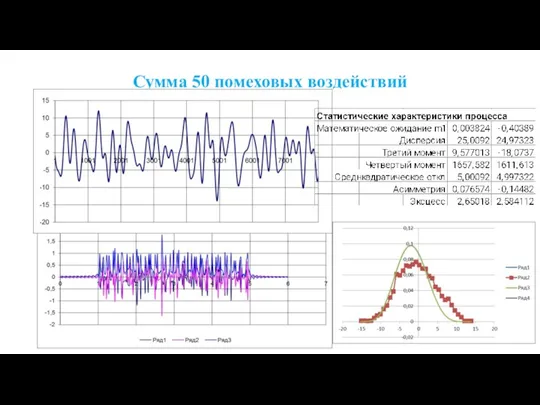
Сумма 50 помеховых воздействий
Сумма 50 помеховых воздействий
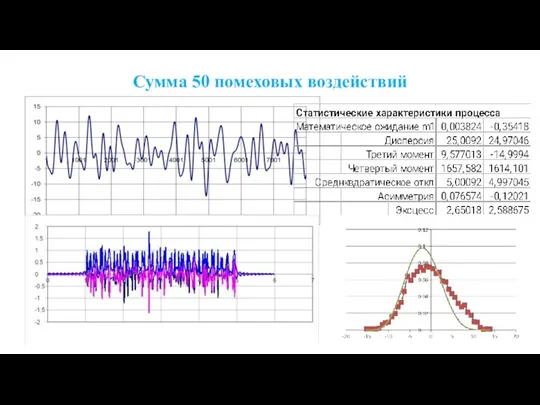
Сумма 50 помеховых воздействий
Сумма 50 помеховых воздействий
Лекция 8
Выделение сигнала из шума
Лекция 8
Выделение сигнала из шума
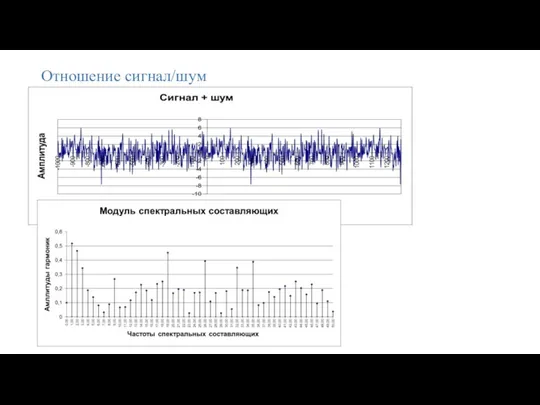
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Отношение сигнал/шум
Лекция 8
ЦАП и АЦП в системе цифровой обработки сигнала
Цифровая фильтрация
Лекция 8
ЦАП и АЦП в системе цифровой обработки сигнала
Цифровая фильтрация
ЦАП и АЦП в системе цифровой обработки сигнала
ЦАП и АЦП в системе цифровой обработки сигнала
Цифроаналоговые преобразователи
Параллельные АЦП - построены на принципе одновременного преобразования входного сигнала путем
Цифроаналоговые преобразователи
Параллельные АЦП - построены на принципе одновременного преобразования входного сигнала путем
Цифроаналоговые преобразователи
Цифроаналоговые преобразователи
Параллельные АЦП
Tакой АЦП работает следующим образом: входной сигнал подается одновременно на
Параллельные АЦП
Tакой АЦП работает следующим образом: входной сигнал подается одновременно на
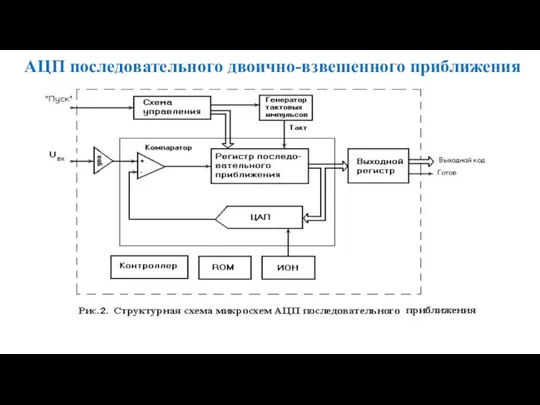
АЦП последовательного двоично-взвешенного приближения
АЦП последовательного двоично-взвешенного приближения
АЦП последовательного приближения
Данный АЦП работает следующим образом. При поступлении импульса "Пуск"
АЦП последовательного приближения
Данный АЦП работает следующим образом. При поступлении импульса "Пуск"

АЦП последовательного приближения
АЦП последовательного приближения
АЦП последовательного приближения
Если UЦАП>Uвх, то компаратор вырабатывает уровень, при котором по
АЦП последовательного приближения
Если UЦАП>Uвх, то компаратор вырабатывает уровень, при котором по
Лекция 9 Цифровая фильтрация
Цифровая фильтрация является одним из наиболее мощных
Лекция 9 Цифровая фильтрация
Цифровая фильтрация является одним из наиболее мощных
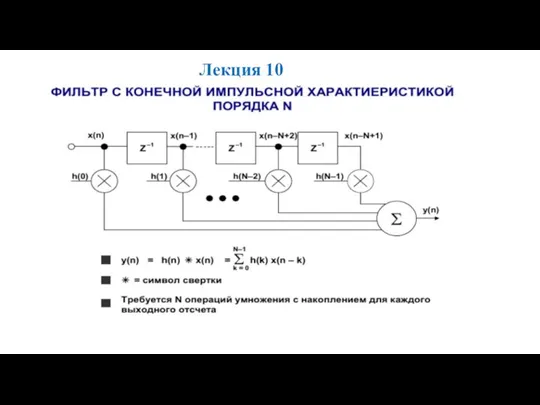
Лекция 10
Лекция 10

Лекция 11
ФИЛЬТРЫ С БЕСКОНЕЧНОЙ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКОЙ
(БИХ)
Как было упомянуто ранее, КИХ-фильтры
Лекция 11
ФИЛЬТРЫ С БЕСКОНЕЧНОЙ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКОЙ
(БИХ)
Как было упомянуто ранее, КИХ-фильтры
БИХ-фильтры
БИХ-фильтры получили такое название, потому что их импульсные характеристики растянуты на
БИХ-фильтры
БИХ-фильтры получили такое название, потому что их импульсные характеристики растянуты на
Лекция 12
Аналоговые фильтры
В дискретных системах, даже с высокой степенью
Лекция 12
Аналоговые фильтры
В дискретных системах, даже с высокой степенью
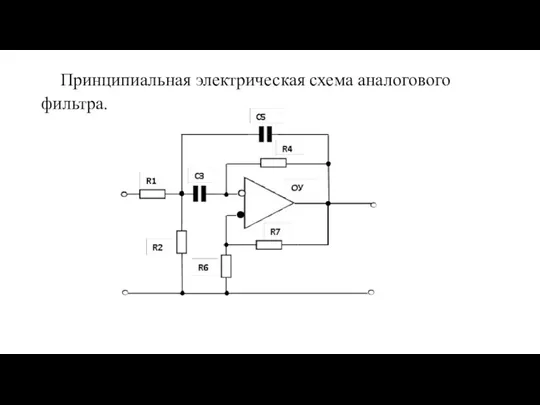
Принципиальная электрическая схема аналогового фильтра.
Принципиальная электрическая схема аналогового фильтра.
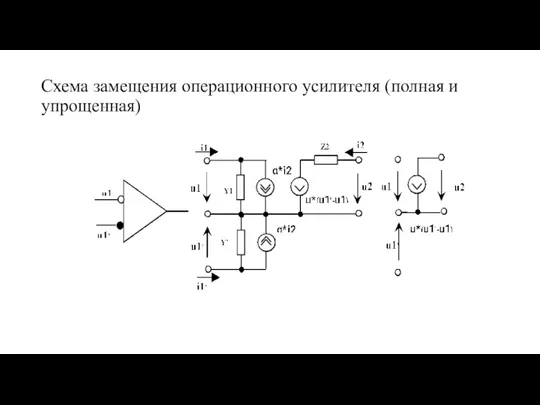
Схема замещения операционного усилителя (полная и упрощенная)
Схема замещения операционного усилителя (полная и упрощенная)
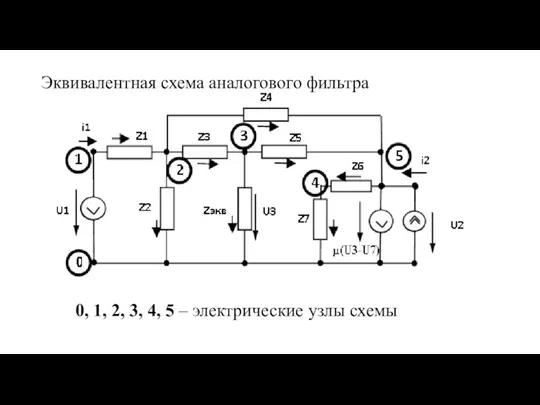
Эквивалентная схема аналогового фильтра
0, 1, 2, 3, 4, 5 – электрические
Эквивалентная схема аналогового фильтра
0, 1, 2, 3, 4, 5 – электрические
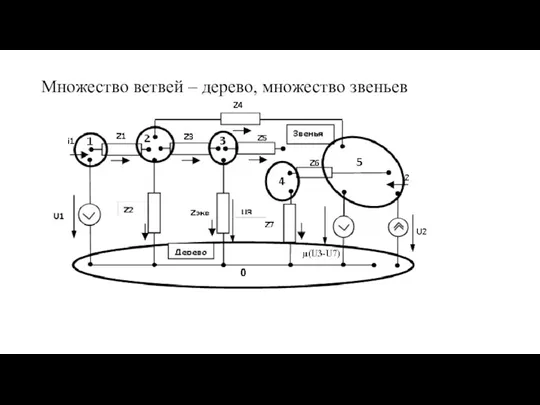
Множество ветвей – дерево, множество звеньев
Множество ветвей – дерево, множество звеньев

Порядок построения сигнального графа по эквивалентной схеме
Порядок построения сигнального графа по эквивалентной схеме
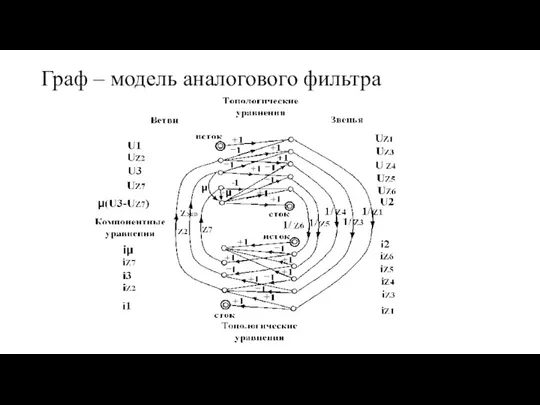
Граф – модель аналогового фильтра
Граф – модель аналогового фильтра
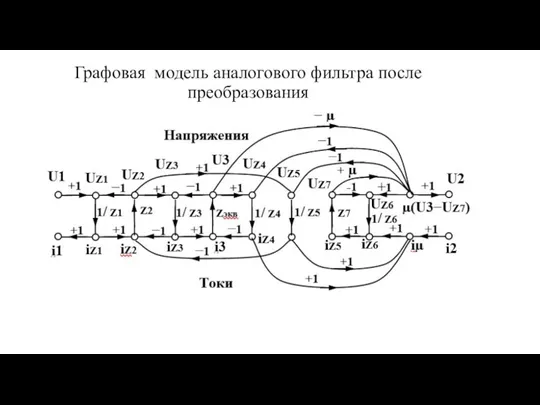
Графовая модель аналогового фильтра после преобразования
Графовая модель аналогового фильтра после преобразования
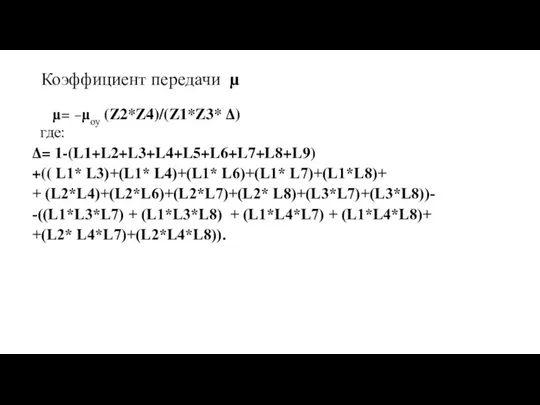
Коэффициент передачи µ
µ= −µоу (Z2*Z4)/(Z1*Z3* Δ)
где:
Δ= 1-(L1+L2+L3+L4+L5+L6+L7+L8+L9)
+(( L1* L3)+(L1*
Коэффициент передачи µ
µ= −µоу (Z2*Z4)/(Z1*Z3* Δ)
где:
Δ= 1-(L1+L2+L3+L4+L5+L6+L7+L8+L9)
+(( L1* L3)+(L1*
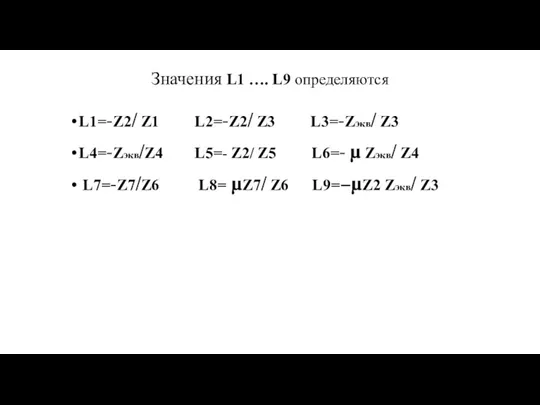
Значения L1 …. L9 определяются
L1=-Z2/ Z1 L2=-Z2/ Z3 L3=-Zэкв/ Z3
L4=-Zэкв/Z4
Значения L1 …. L9 определяются
L1=-Z2/ Z1 L2=-Z2/ Z3 L3=-Zэкв/ Z3
L4=-Zэкв/Z4
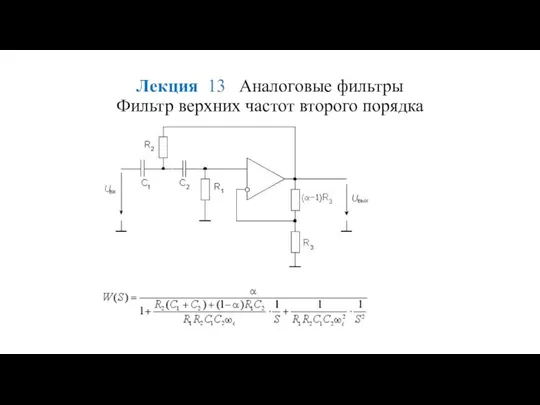
Лекция 13 Аналоговые фильтры
Фильтр верхних частот второго порядка
Лекция 13 Аналоговые фильтры
Фильтр верхних частот второго порядка
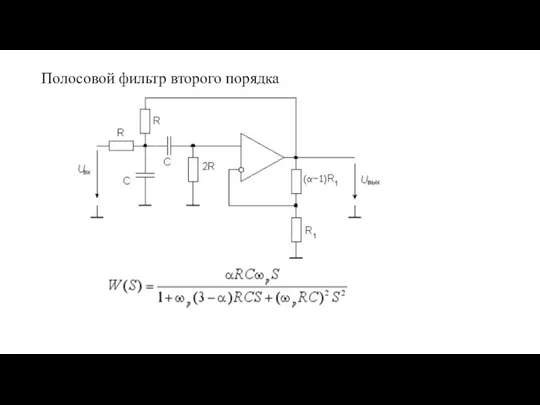
Полосовой фильтр второго порядка
Полосовой фильтр второго порядка
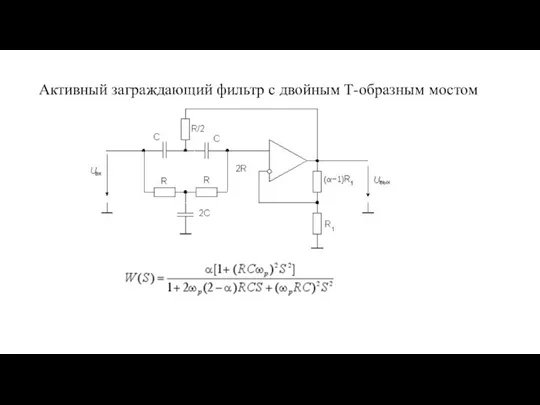
Активный заграждающий фильтр с двойным Т-образным мостом
Активный заграждающий фильтр с двойным Т-образным мостом
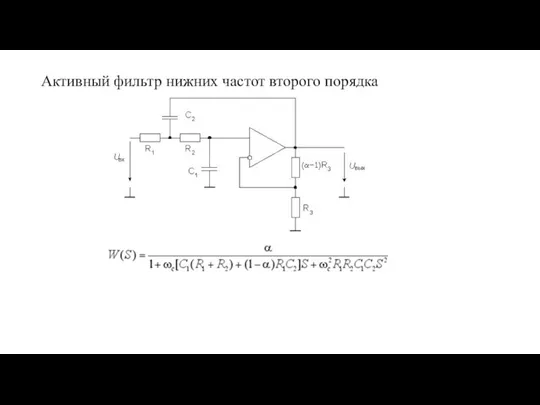
Активный фильтр нижних частот второго порядка
Активный фильтр нижних частот второго порядка

Передаточные функции различных аналоговых фильтров
Передаточные функции различных аналоговых фильтров
Лекция 14
Системы передачи информации
Система передачи информации — совокупность технических средств (передатчик,
Лекция 14
Системы передачи информации
Система передачи информации — совокупность технических средств (передатчик,
Лекция 14
Структурная схема простейшей одноканальной системы связи
Лекция 14
Структурная схема простейшей одноканальной системы связи
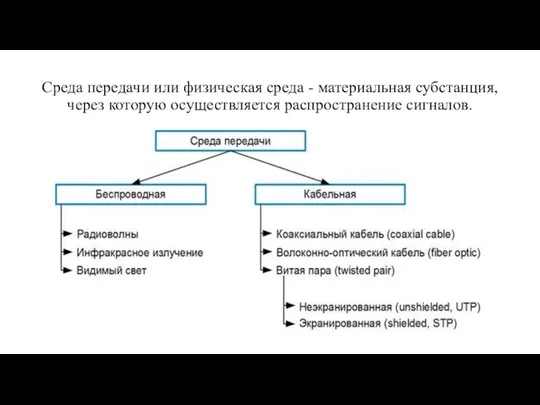
Среда передачи или физическая среда - материальная субстанция, через которую осуществляется
Среда передачи или физическая среда - материальная субстанция, через которую осуществляется
В узком смысле под термином линия подразумевается физическая среда, по которой
В узком смысле под термином линия подразумевается физическая среда, по которой
Основные характеристики канала связи
К основным характеристикам канала (линии) связи, существенно влияющим
Основные характеристики канала связи
К основным характеристикам канала (линии) связи, существенно влияющим
Полоса пропускания
Полоса – диапазон частот, в пределах которого амплитудно-частотная пропускания характеристика
Полоса пропускания
Полоса – диапазон частот, в пределах которого амплитудно-частотная пропускания характеристика
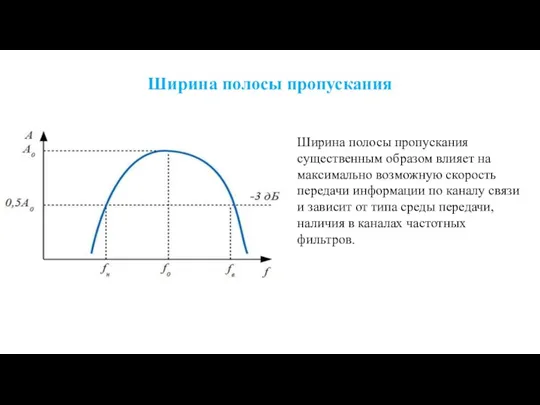
Ширина полосы пропускания
Ширина полосы пропускания существенным образом влияет на максимально возможную
Ширина полосы пропускания
Ширина полосы пропускания существенным образом влияет на максимально возможную
Ширина полосы пропускания
Сигналы составлены из большого набора гармоник, однако приемник может
Ширина полосы пропускания
Сигналы составлены из большого набора гармоник, однако приемник может
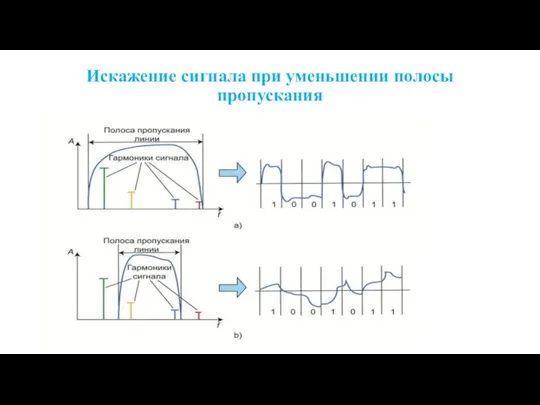
Искажение сигнала при уменьшении полосы пропускания
Искажение сигнала при уменьшении полосы пропускания
Затухание
При передаче сигнала по каналу связи, происходит его постепенное ослабление (затухание),
Затухание
При передаче сигнала по каналу связи, происходит его постепенное ослабление (затухание),
Затухание
Затухание характерно как для аналоговых, так и для цифровых сигналов. Оно
Затухание
Затухание характерно как для аналоговых, так и для цифровых сигналов. Оно
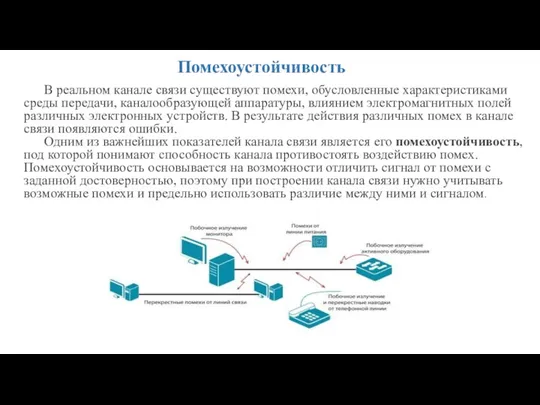
Помехоустойчивость
В реальном канале связи существуют помехи, обусловленные характеристиками среды передачи, каналообразующей
Помехоустойчивость
В реальном канале связи существуют помехи, обусловленные характеристиками среды передачи, каналообразующей
Помехи
В зависимости от источника возникновения и от характера их воздействия помехи
Помехи
В зависимости от источника возникновения и от характера их воздействия помехи
Помехи
Радиопомехи (радиочастотная интерференция, возникают от излучения радиостанций различного назначения, спектр которых
Помехи
Радиопомехи (радиочастотная интерференция, возникают от излучения радиостанций различного назначения, спектр которых
Отношение сигнал/шум
Одним из важных параметров канала связи, позволяющим оценить мешающее воздействие
Отношение сигнал/шум
Одним из важных параметров канала связи, позволяющим оценить мешающее воздействие
 Основы автоматизации и автоматизация производственных процессов ( ОА и АПП)
Основы автоматизации и автоматизация производственных процессов ( ОА и АПП) Обработка данных средствами электронных таблиц Microsoft Excel
Обработка данных средствами электронных таблиц Microsoft Excel Знакомство с IDE
Знакомство с IDE Язык программирования Python. Основы языка Python. Линейные программы
Язык программирования Python. Основы языка Python. Линейные программы Использование логических функций в excel
Использование логических функций в excel Инструкция по работе с приложением Adobe Acrobat PRO DC
Инструкция по работе с приложением Adobe Acrobat PRO DC Введение в HTML 5
Введение в HTML 5 Электронное портфолио Exabis E-Portfolio
Электронное портфолио Exabis E-Portfolio Конспект урока информатики на тему Хранение информации
Конспект урока информатики на тему Хранение информации Знакомство с новым учебником по информатике. (8 класс)
Знакомство с новым учебником по информатике. (8 класс) Технологии баз данных и знаний
Технологии баз данных и знаний Направление в Банк выписки СЗИ 6 из ПФ РФ с использованием Портала Госуслуг
Направление в Банк выписки СЗИ 6 из ПФ РФ с использованием Портала Госуслуг Современные способы и средства зашиты информации
Современные способы и средства зашиты информации Формы и отчеты в СУБД Access
Формы и отчеты в СУБД Access Эффективное продвижение в INSTAGRAM 2018
Эффективное продвижение в INSTAGRAM 2018 Дополнительные возможности использования Active Directory в корпоративной сети
Дополнительные возможности использования Active Directory в корпоративной сети Відгуки про ковбасу
Відгуки про ковбасу Основы информатики и компьютерный практикум. ОС Windows. Текстовый процессор Word
Основы информатики и компьютерный практикум. ОС Windows. Текстовый процессор Word Трёхмерная графика и 3D - моделирование
Трёхмерная графика и 3D - моделирование История развития вычислительной техники
История развития вычислительной техники Устройство ЭВМ
Устройство ЭВМ Модель даних “сутність-зв’язок”
Модель даних “сутність-зв’язок” Історія комп'ютерної техніки
Історія комп'ютерної техніки Возможности интерактивности в создании современных аудиовизуальных программ
Возможности интерактивности в создании современных аудиовизуальных программ Урок по теме Системы счисления 9 класс
Урок по теме Системы счисления 9 класс Антивирусные программы
Антивирусные программы Создание модели подарочной коробки при помощи программы Tinkercad
Создание модели подарочной коробки при помощи программы Tinkercad Лекция № 12. Транзакции,тригеры
Лекция № 12. Транзакции,тригеры