- УУ с программируемой логикой (Р-автоматы)

Содержание
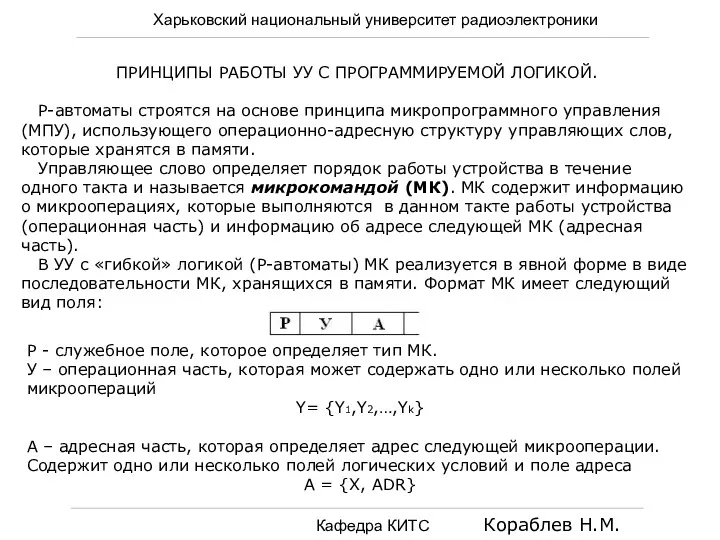
- 2. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. ПРИНЦИПЫ РАБОТЫ УУ С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ. Р-автоматы строятся
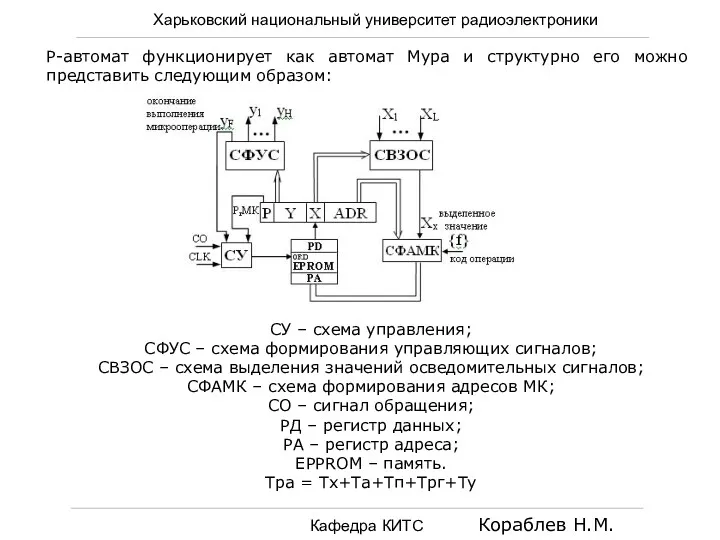
- 3. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. Р-автомат функционирует как автомат Мура и структурно его
- 4. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. В зависимости от принятого способа кодирования МК различают
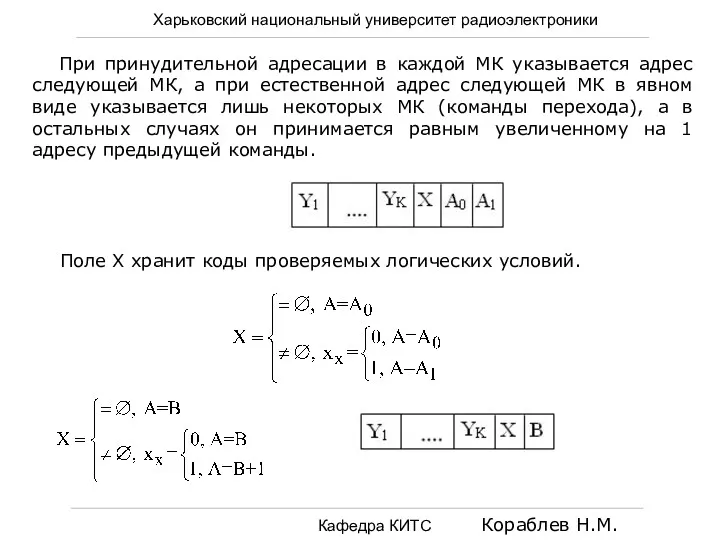
- 5. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. При принудительной адресации в каждой МК указывается адрес
- 6. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. С целью сокращения разрядности МК в случаях, когда
- 7. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. ПРОЕКТИРОВАНИЕ P-АВТОМАТОВ Проектирование P-автоматов состоит из следующих этапов:
- 8. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М.
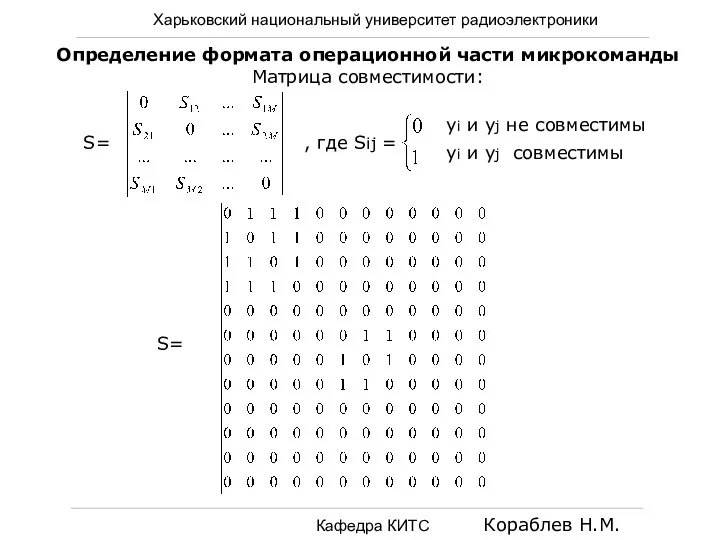
- 9. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. Определение формата операционной части микрокоманды Матрица совместимости: S=
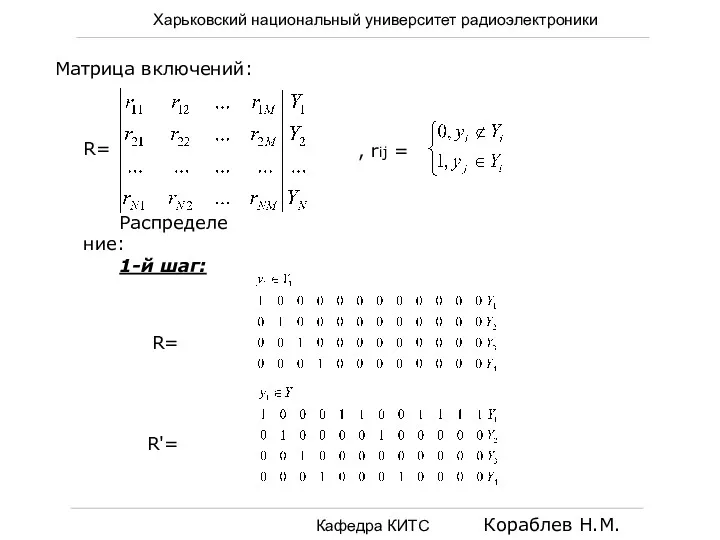
- 10. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. Матрица включений: R= , rij = Распределение: 1-й
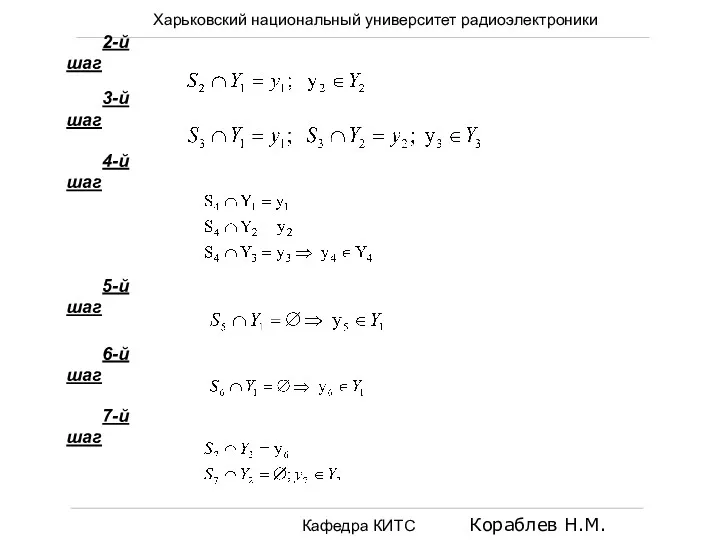
- 11. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. 2-й шаг 3-й шаг 4-й шаг 5-й шаг
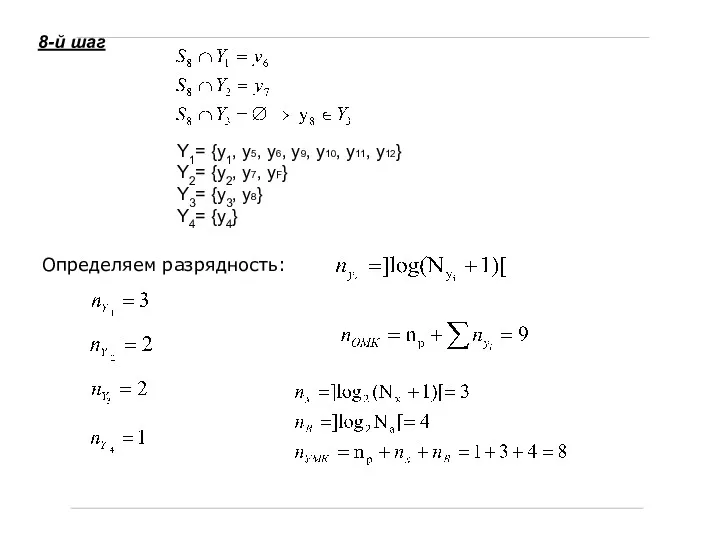
- 12. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. 8-й шаг Y1= {y1, y5, y6, y9, y10,
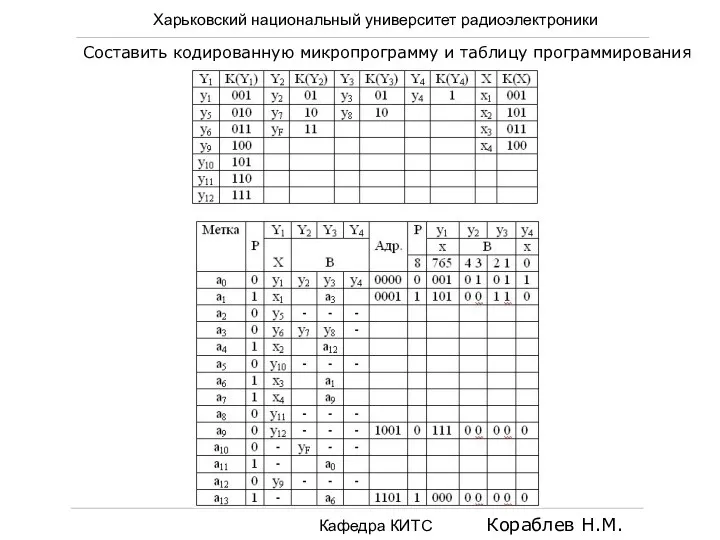
- 13. Харьковский национальный университет радиоэлектроники Кафедра КИТС Кораблев Н.М. Составить кодированную микропрограмму и таблицу программирования
- 15. Скачать презентацию
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
ПРИНЦИПЫ РАБОТЫ УУ
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
ПРИНЦИПЫ РАБОТЫ УУ
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Р-автомат функционирует как
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Р-автомат функционирует как
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
В зависимости
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
В зависимости
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
При принудительной
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
При принудительной

Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
С целью
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
С целью
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
ПРОЕКТИРОВАНИЕ P-АВТОМАТОВ
Проектирование
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
ПРОЕКТИРОВАНИЕ P-АВТОМАТОВ
Проектирование
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Определение формата операционной
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Определение формата операционной
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Матрица включений:
R=
,
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Матрица включений:
R=
,
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
2-й шаг
3-й шаг
4-й
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
2-й шаг
3-й шаг
4-й
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
8-й шаг
Y1= {y1,
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
8-й шаг
Y1= {y1,
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Составить кодированную микропрограмму
Харьковский национальный университет радиоэлектроники
Кафедра КИТС Кораблев Н.М.
Составить кодированную микропрограмму
 Создание инфографики
Создание инфографики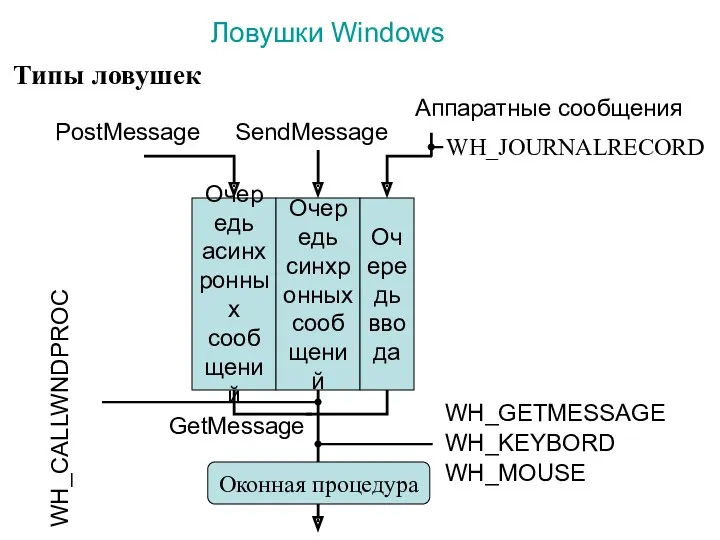 Ловушки Windows. Типы ловушек. (Лекция 14)
Ловушки Windows. Типы ловушек. (Лекция 14) Ашманов Игорь Станиславович
Ашманов Игорь Станиславович Информация в живой и неживой природе
Информация в живой и неживой природе Клиентская часть веб-приложений
Клиентская часть веб-приложений СМИ (средства массовой информации)
СМИ (средства массовой информации) Әртүрлі микроархитектураларды тарату. IJVM микроархитектурасы
Әртүрлі микроархитектураларды тарату. IJVM микроархитектурасы Сайты для учителя физики
Сайты для учителя физики Информационные системы и системология
Информационные системы и системология Проблемы информационной безопасности. Лекция №8
Проблемы информационной безопасности. Лекция №8 Коммерческое предложение для компании Эколас. Интернет в офис
Коммерческое предложение для компании Эколас. Интернет в офис Алгоритмы… Кругом алгоритмы!
Алгоритмы… Кругом алгоритмы! Организация данных. Данные, информация, информационные системы
Организация данных. Данные, информация, информационные системы Служение и работа за компьютером
Служение и работа за компьютером Оглавление. Создание автоматического оглавления. Microsoft Office Word 2007
Оглавление. Создание автоматического оглавления. Microsoft Office Word 2007 Економічна інформація та її формалізований опис
Економічна інформація та її формалізований опис Технология Near Field Communication (NFC)
Технология Near Field Communication (NFC) Информационная система специалиста по охране труда. Версия 6.0
Информационная система специалиста по охране труда. Версия 6.0 Белгі бойынша көпхаттамалы коммутация технологиясының жұмысын өңдеу
Белгі бойынша көпхаттамалы коммутация технологиясының жұмысын өңдеу Қарапайым HTML-бетін құру HTML тілінің атқаратын қызметі
Қарапайым HTML-бетін құру HTML тілінің атқаратын қызметі Телевидение, видео, интернет… Что дальше?
Телевидение, видео, интернет… Что дальше? Электронная почта e-mail
Электронная почта e-mail Моделирование физических процессов
Моделирование физических процессов Введение в статистику. Общие сведения, история, факты, анализ медицинских данных, статистические программы
Введение в статистику. Общие сведения, история, факты, анализ медицинских данных, статистические программы День информации. Книга как важный источник информации
День информации. Книга как важный источник информации Подходы к разработке ПС
Подходы к разработке ПС Интернет в нашей жизни
Интернет в нашей жизни Керування оперативною пам'яттю у процесорах архітектури х86. (Лекція 8)
Керування оперативною пам'яттю у процесорах архітектури х86. (Лекція 8)