- Windows Thread Synchronization

Содержание
- 2. OBJECTIVES Upon completion of this Session, you will be able to: Describe the various Windows synchronization
- 3. AGENDA Part I Need for Synchronization Part II Thread Synchronization Objects Part III CRITICAL_SECTIONs Part IV
- 4. IMPORTANT APIs IN THIS SESSION Initialize/Delete/Enter/Leave/TryCriticalSection InterlockedIncrement/Decrement/Exchange/… CreateMutex/Event/Semaphore OpenMutex/Event/Semaphore ReleaseMutex/Semaphore, Pulse/SetResetEvent SignalObjectAndWait
- 5. Part I - Need for Synchronization Why is thread synchronization required? Examples: Boss thread cannot proceed
- 6. A SYNCHRONIZATION PROBLEM M 4 5 4 5 M = N; M = M + 1;
- 7. Part II - Thread Synchronization Objects Known Windows mechanism to synchronize threads: A thread can wait
- 8. Synchronization Objects Windows (pre-Vista) provides four other objects for thread and process synchronization Three are kernel
- 9. Critical Section Objects Critical sections Fourth object type can only synchronize threads within a process Often
- 10. Part III - CRITICAL_SECTIONs VOID InitializeCriticalSection ( LPCRITICAL_SECTION lpcsCriticalSection) VOID DeleteCriticalSection ( LPCRITICAL_SECTION lpcsCriticalSection) VOID EnterCriticalSection
- 11. CRITICAL_SECTION Management VOID LeaveCriticalSection ( LPCRITICAL_SECTION lpcsCriticalSection) BOOL TryCriticalSection ( LPCRITICAL_SECTION lpcsCriticalSection)
- 12. CRITICAL_SECTION Usage EnterCriticalSection blocks a thread if another thread is in (“owns”) the section Use TryCriticalSection
- 13. SYNCHRONIZATION CSs M 4 5 N 4 M = N; M = M + 1; Running
- 14. CRITICAL SECTIONS AND __finally Here is method to assure that you leave a critical section Even
- 15. __finally (2 of 2) CRITICAL_SECTION cs; ... InitializeCriticalSection (&cs); ... EnterCriticalSection (&cs); _try { ... }
- 16. CRITICAL_SECTION Comments CRITICAL_SECTIONS test the lock in user-space Fast – no kernel call But wait in
- 17. Part IV - Deadlock Example Here is a program defect that could cause a deadlock Some
- 18. Deadlock Example CRITICAL_SECTION csM, csN; volatile DWORD M = 0, N = 0; InitializeCriticalSection (&csM); ICS
- 19. Part V - Interlocked Functions For simple manipulation of signed 32-bit numbers, you can use the
- 20. Interlocked Functions LONG InterlockedIncrement(LONG volatile *lpAddend) LONG InterlockedDecrement(LONG volatile *lpAddend) Return the resulting value Which might
- 21. Interlocked CompareExchange LONG InterlockedCompareExchange( LONG volatile *lpDest, LONG Exch, LONG Comparand) Operands must be 4-byte aligned
- 22. Other Interlocked Functions InterlockedExchangePointer InterlockedAnd, InterlockedOr, InterlockedXor 8, 16, 32, and 64-bit versions InterlockedIncrement64, InterlockedDecrement64 InterlockedCompare64Exchange128
- 23. Part VI - Mutexes (1 of 6) Mutexes can be named and have HANDLEs They are
- 24. Mutexes (2 of 6) Recursive: A thread can acquire a specific mutex several times but must
- 25. Mutexes (3 of 6) HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpsa, BOOL fInitialOwner, LPCTSTR lpszMutexName) The fInitialOwner flag, if TRUE,
- 26. Mutexes (4 of 6) BOOL ReleaseMutex(HANDLE hMutex) ReleaseMutex frees a mutex that the calling thread owns
- 27. Mutexes (5 of 6) Mutex naming: Name a mutex that is to be used by more
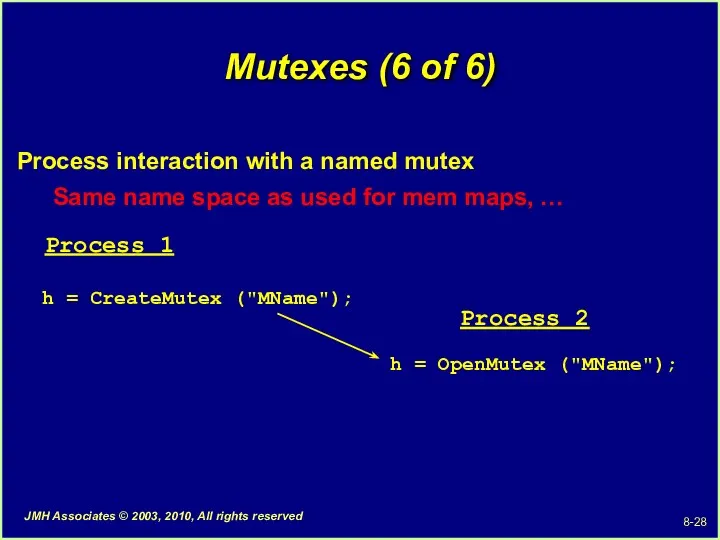
- 28. Mutexes (6 of 6) Process interaction with a named mutex Same name space as used for
- 29. Part VII - EVENTS (1 of 6) Events can release multiple threads from a wait simultaneously
- 30. EVENTS (2 of 6) HANDLE CreateEvent( LPSECURITY_ATTRIBUTES lpsa, BOOL fManualReset, BOOL fInitialState, LPTCSTR lpszEventName) Manual-reset event:
- 31. EVENTS (3 of 6) The three functions for controlling events are: BOOL SetEvent(HANDLE hEvent) BOOL ResetEvent(HANDLE
- 32. EVENTS (4 of 6) A thread signals an event with SetEvent If the event is auto-reset,
- 33. EVENTS (5 of 6) If the event is manual-reset, the event remains signaled until some thread
- 34. EVENTS (6 of 6) When using WaitForMultipleEvents, wait for all events to become signaled A waiting
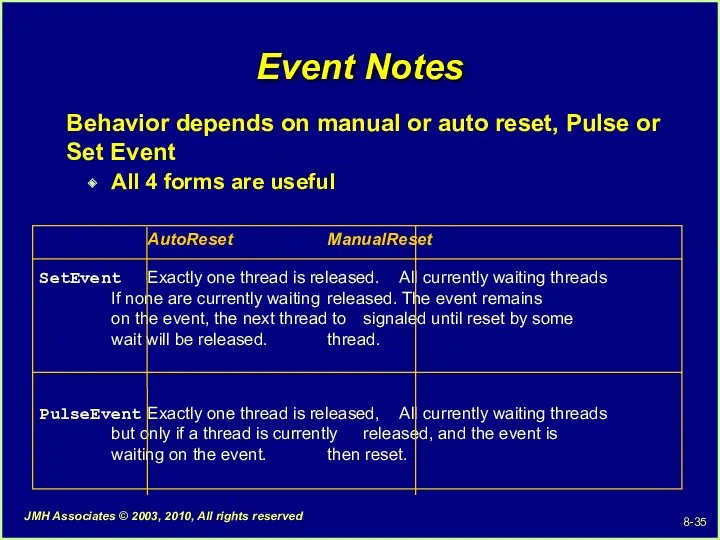
- 35. Event Notes Behavior depends on manual or auto reset, Pulse or Set Event All 4 forms
- 36. Part VIII - SEMAPHORES (1 of 4) A semaphore combines event and mutex behavior Can be
- 37. SEMAPHORES (2 of 4) Threads or processes wait in the normal way, using one of the
- 38. SEMAPHORES (3 of 4) HANDLE CreateSemaphore( LPSECURITY_ATTRIBUTES lpsa, LONG cSemInitial, LONG cSemMax, LPCTSTR lpszSemName) cSemMax is
- 39. SEMAPHORES (4 of 4) BOOL ReleaseSemaphore( HANDLE hSemaphore, LONG cReleaseCount, LPLONG lpPreviousCount) You can find the
- 40. A SEMAPHORE DEADLOCK DEFECT There is no “atomic” wait for multiple semaphore units But you can
- 41. Part IX - Windows SYNCHRONIZATION OBJECTS Summary
- 42. CRITICAL SECTION Named, Securable Synchronization Object Accessible from Multiple Processes Synchronization Release Ownership Effect of Release
- 43. MUTEX Named, Securable Synchronization Object Accessible from Multiple Processes Synchronization Release Ownership Effect of Release Yes
- 44. SEMAPHORE Named, Securable Synchronization Object Accessible from Multiple Processes Synchronization Release Ownership Effect of Release Yes
- 45. EVENT Named, Securable Synchronization Object Accessible from Multiple Processes Synchronization Release Ownership Effect of Release Yes
- 46. Part X - Lab/Demo Exercise 8-1 Create two working threads: A producer and a consumer The
- 47. Part XI - Condition Variable Model Using Models (or Patterns) Use well-understood and familiar techniques and
- 48. Events and Mutexes Together (1 of 2) Similar to POSIX Pthreads Illustrated with a message producer/consumer
- 49. Events and Mutexes Together (2 of 2) One thread (producer) locks the data structure Changes the
- 50. The Condition Variable Model (1 of 4) Several key elements: Data structure of type STATE_TYPE Contains
- 51. The Condition Variable Model (2 of 4) typedef struct _state_t { HANDLE Guard; /* Mutex to
- 52. The Condition Variable Model (3 of 4) /* This is the “Signal” CV model */ /*
- 53. The Condition Variable Model (4 of 4) /* CONSUMER thread waits for a particular state */
- 54. Condition Variable Model Comments Three essential steps of the loop in the consumer Unlock the mutex
- 55. Using SignalObjectAndWait() /* CONSUMER thread waits for NEXT state change */ /* Use SignalObjectAndWait() */ WaitForSingleObject
- 56. CV Model Variation In producer/consumer code, ONE consumer is released Signal CV model Auto-reset event, SetEvent
- 57. Broadcast CV Model Consumer /* CONSUMER thread waits for NEXT state change */ /* Event is
- 58. Part XII - Multithreading: Designing, Debugging, Testing Hints Avoiding Incorrect Code (1 of 3) Pay attention
- 59. Avoiding Incorrect Code (2 of 3) Avoid relying on “thread inertia” Never bet on a thread
- 60. Avoiding Incorrect Code (3 of 3) Beware of sharing stacks and related memory corrupters Use the
- 61. Part XIII - Lab 8-2 Debug and test the ThreeStage pipeline implementation Two libraries are required:
- 62. Lab 8-2: Multistage Pipeline Q Q Transmitter Receiver Consumers Q M1 M2 . . . M5
- 64. Скачать презентацию
OBJECTIVES
Upon completion of this Session, you will be able to:
Describe the
OBJECTIVES
Upon completion of this Session, you will be able to:
Describe the
AGENDA
Part I Need for Synchronization
Part II Thread Synchronization Objects
Part III CRITICAL_SECTIONs
Part IV Deadlock Example
Part
AGENDA
Part I Need for Synchronization
Part II Thread Synchronization Objects
Part III CRITICAL_SECTIONs
Part IV Deadlock Example
Part
IMPORTANT APIs IN THIS SESSION
Initialize/Delete/Enter/Leave/TryCriticalSection
InterlockedIncrement/Decrement/Exchange/…
CreateMutex/Event/Semaphore
OpenMutex/Event/Semaphore
ReleaseMutex/Semaphore, Pulse/SetResetEvent
SignalObjectAndWait
IMPORTANT APIs IN THIS SESSION
Initialize/Delete/Enter/Leave/TryCriticalSection
InterlockedIncrement/Decrement/Exchange/…
CreateMutex/Event/Semaphore
OpenMutex/Event/Semaphore
ReleaseMutex/Semaphore, Pulse/SetResetEvent
SignalObjectAndWait
Part I - Need for Synchronization
Why is thread synchronization required? Examples:
Boss
Part I - Need for Synchronization
Why is thread synchronization required? Examples:
Boss
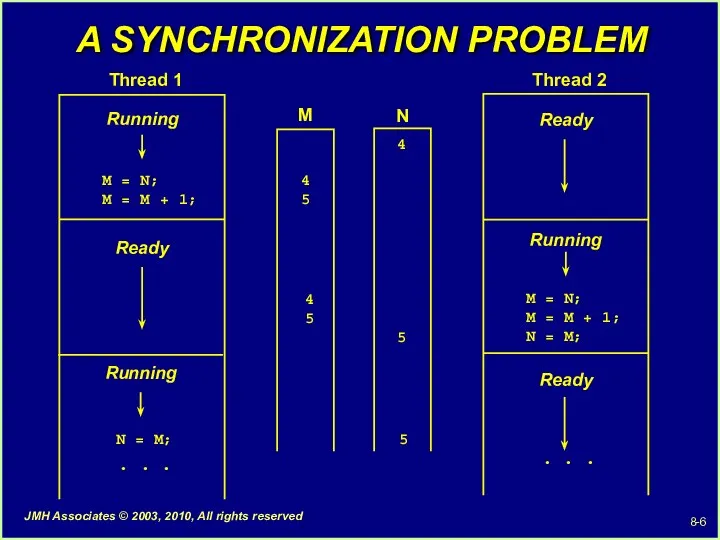
A SYNCHRONIZATION PROBLEM
M
4
5
4
5
M = N;
M = M + 1;
Running
N = M;
Running
·
A SYNCHRONIZATION PROBLEM
M
4
5
4
5
M = N;
M = M + 1;
Running
N = M;
Running
·
Part II - Thread Synchronization Objects
Known Windows mechanism to synchronize threads:
A
Part II - Thread Synchronization Objects
Known Windows mechanism to synchronize threads:
A
Synchronization Objects
Windows (pre-Vista) provides four other objects for thread and process
Synchronization Objects
Windows (pre-Vista) provides four other objects for thread and process
Critical Section Objects
Critical sections
Fourth object type can only synchronize threads within
Critical Section Objects
Critical sections
Fourth object type can only synchronize threads within
Part III - CRITICAL_SECTIONs
VOID InitializeCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
VOID DeleteCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
VOID EnterCriticalSection
Part III - CRITICAL_SECTIONs
VOID InitializeCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
VOID DeleteCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
VOID EnterCriticalSection
CRITICAL_SECTION Management
VOID LeaveCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
BOOL TryCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
CRITICAL_SECTION Management
VOID LeaveCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
BOOL TryCriticalSection (
LPCRITICAL_SECTION lpcsCriticalSection)
CRITICAL_SECTION Usage
EnterCriticalSection blocks a thread if another thread is in (“owns”)
CRITICAL_SECTION Usage
EnterCriticalSection blocks a thread if another thread is in (“owns”)
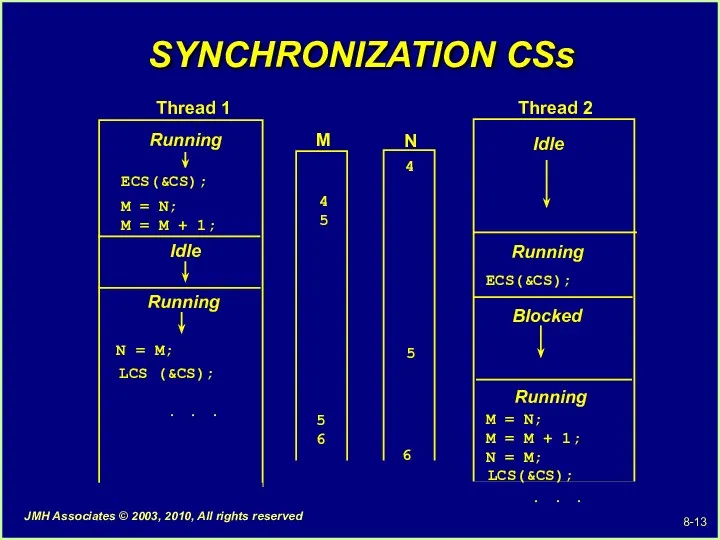
SYNCHRONIZATION CSs
M
4
5
N
4
M = N;
M = M + 1;
Running
Idle
Thread 1
Idle
Running
· · ·
Thread
SYNCHRONIZATION CSs
M
4
5
N
4
M = N;
M = M + 1;
Running
Idle
Thread 1
Idle
Running
· · ·
Thread
CRITICAL SECTIONS AND __finally
Here is method to assure that you leave
CRITICAL SECTIONS AND __finally
Here is method to assure that you leave
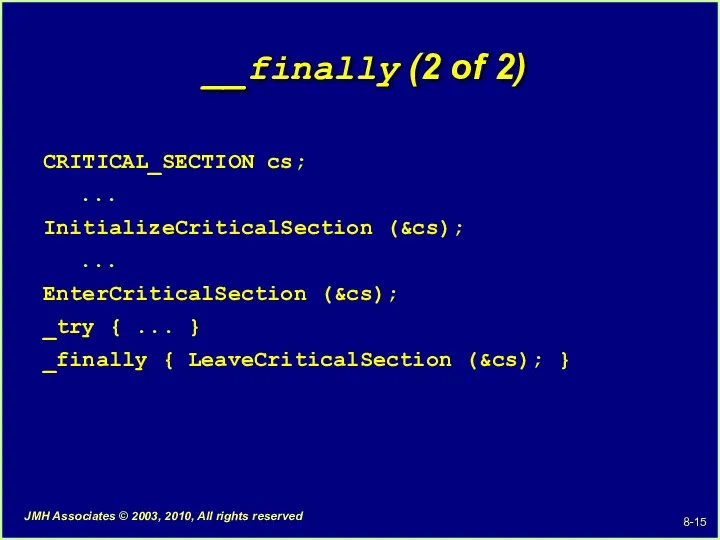
__finally (2 of 2)
CRITICAL_SECTION cs;
...
InitializeCriticalSection (&cs);
...
EnterCriticalSection (&cs);
_try { ... }
_finally
__finally (2 of 2)
CRITICAL_SECTION cs;
...
InitializeCriticalSection (&cs);
...
EnterCriticalSection (&cs);
_try { ... }
_finally
CRITICAL_SECTION Comments
CRITICAL_SECTIONS test the lock in user-space
Fast – no kernel call
But
CRITICAL_SECTION Comments
CRITICAL_SECTIONS test the lock in user-space
Fast – no kernel call
But
Part IV - Deadlock Example
Here is a program defect that could
Part IV - Deadlock Example
Here is a program defect that could
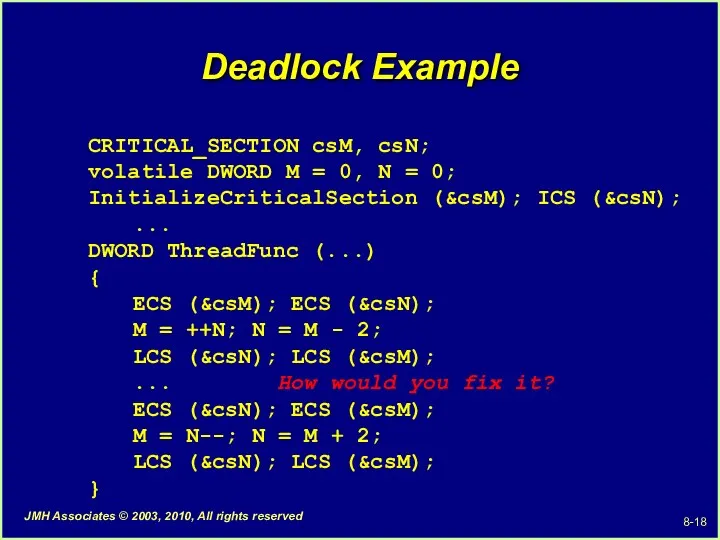
Deadlock Example
CRITICAL_SECTION csM, csN;
volatile DWORD M = 0, N = 0;
InitializeCriticalSection
Deadlock Example
CRITICAL_SECTION csM, csN;
volatile DWORD M = 0, N = 0;
InitializeCriticalSection
Part V - Interlocked Functions
For simple manipulation of signed 32-bit numbers,
Part V - Interlocked Functions
For simple manipulation of signed 32-bit numbers,
Interlocked Functions
LONG InterlockedIncrement(LONG volatile *lpAddend)
LONG InterlockedDecrement(LONG volatile *lpAddend)
Return the resulting value
Interlocked Functions
LONG InterlockedIncrement(LONG volatile *lpAddend)
LONG InterlockedDecrement(LONG volatile *lpAddend)
Return the resulting value
Interlocked CompareExchange
LONG InterlockedCompareExchange(
LONG volatile *lpDest, LONG Exch,
LONG Comparand)
Operands must be 4-byte
Interlocked CompareExchange
LONG InterlockedCompareExchange(
LONG volatile *lpDest, LONG Exch,
LONG Comparand)
Operands must be 4-byte
Other Interlocked Functions
InterlockedExchangePointer
InterlockedAnd, InterlockedOr, InterlockedXor
8, 16, 32, and 64-bit versions
InterlockedIncrement64, InterlockedDecrement64
InterlockedCompare64Exchange128
Compares
Other Interlocked Functions
InterlockedExchangePointer
InterlockedAnd, InterlockedOr, InterlockedXor
8, 16, 32, and 64-bit versions
InterlockedIncrement64, InterlockedDecrement64
InterlockedCompare64Exchange128
Compares
Part VI - Mutexes (1 of 6)
Mutexes can be named and
Part VI - Mutexes (1 of 6)
Mutexes can be named and
Mutexes (2 of 6)
Recursive: A thread can acquire a specific mutex
Mutexes (2 of 6)
Recursive: A thread can acquire a specific mutex
Mutexes (3 of 6)
HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpsa,
BOOL fInitialOwner,
LPCTSTR lpszMutexName)
The fInitialOwner flag, if
Mutexes (3 of 6)
HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpsa,
BOOL fInitialOwner,
LPCTSTR lpszMutexName)
The fInitialOwner flag, if
Mutexes (4 of 6)
BOOL ReleaseMutex(HANDLE hMutex)
ReleaseMutex frees a mutex that the
Mutexes (4 of 6)
BOOL ReleaseMutex(HANDLE hMutex)
ReleaseMutex frees a mutex that the
Mutexes (5 of 6)
Mutex naming:
Name a mutex that is to be
Mutexes (5 of 6)
Mutex naming:
Name a mutex that is to be
Mutexes (6 of 6)
Process interaction with a named mutex
Same name space
Mutexes (6 of 6)
Process interaction with a named mutex
Same name space
Part VII - EVENTS (1 of 6)
Events can release multiple threads
Part VII - EVENTS (1 of 6)
Events can release multiple threads
EVENTS (2 of 6)
HANDLE CreateEvent(
LPSECURITY_ATTRIBUTES lpsa,
BOOL fManualReset, BOOL fInitialState,
LPTCSTR lpszEventName)
Manual-reset event:
EVENTS (2 of 6)
HANDLE CreateEvent(
LPSECURITY_ATTRIBUTES lpsa,
BOOL fManualReset, BOOL fInitialState,
LPTCSTR lpszEventName)
Manual-reset event:
EVENTS (3 of 6)
The three functions for controlling events are:
BOOL SetEvent(HANDLE
EVENTS (3 of 6)
The three functions for controlling events are:
BOOL SetEvent(HANDLE
EVENTS (4 of 6)
A thread signals an event with SetEvent
If the
EVENTS (4 of 6)
A thread signals an event with SetEvent
If the
EVENTS (5 of 6)
If the event is manual-reset, the event remains
EVENTS (5 of 6)
If the event is manual-reset, the event remains
EVENTS (6 of 6)
When using WaitForMultipleEvents, wait for all events to
EVENTS (6 of 6)
When using WaitForMultipleEvents, wait for all events to
Event Notes
Behavior depends on manual or auto reset, Pulse or Set
Event Notes
Behavior depends on manual or auto reset, Pulse or Set
Part VIII - SEMAPHORES (1 of 4)
A semaphore combines event and
Part VIII - SEMAPHORES (1 of 4)
A semaphore combines event and
SEMAPHORES (2 of 4)
Threads or processes wait in the normal way,
SEMAPHORES (2 of 4)
Threads or processes wait in the normal way,
SEMAPHORES (3 of 4)
HANDLE CreateSemaphore(
LPSECURITY_ATTRIBUTES lpsa,
LONG cSemInitial, LONG cSemMax,
LPCTSTR lpszSemName)
cSemMax is
SEMAPHORES (3 of 4)
HANDLE CreateSemaphore(
LPSECURITY_ATTRIBUTES lpsa,
LONG cSemInitial, LONG cSemMax,
LPCTSTR lpszSemName)
cSemMax is
SEMAPHORES (4 of 4)
BOOL ReleaseSemaphore(
HANDLE hSemaphore,
LONG cReleaseCount,
LPLONG lpPreviousCount)
You can find the
SEMAPHORES (4 of 4)
BOOL ReleaseSemaphore(
HANDLE hSemaphore,
LONG cReleaseCount,
LPLONG lpPreviousCount)
You can find the
A SEMAPHORE DEADLOCK DEFECT
There is no “atomic” wait for multiple semaphore
A SEMAPHORE DEADLOCK DEFECT
There is no “atomic” wait for multiple semaphore
Part IX - Windows SYNCHRONIZATION OBJECTS
Summary
Part IX - Windows SYNCHRONIZATION OBJECTS
Summary
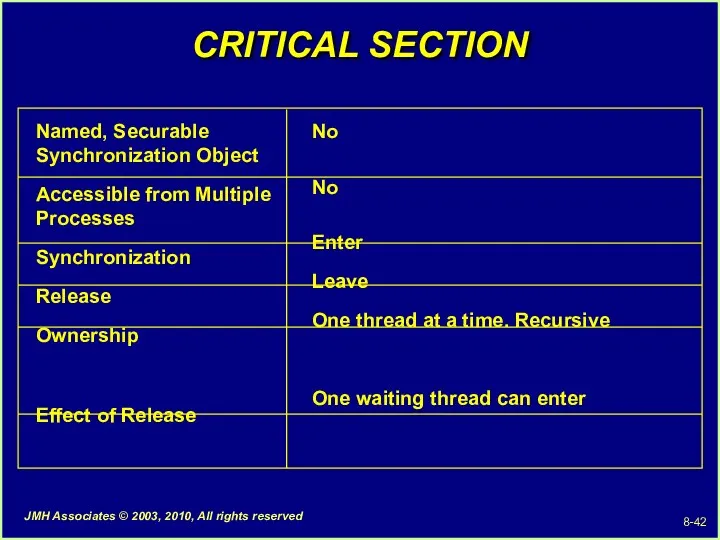
CRITICAL SECTION
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
No
No
Enter
Leave
One thread at
CRITICAL SECTION
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
No
No
Enter
Leave
One thread at
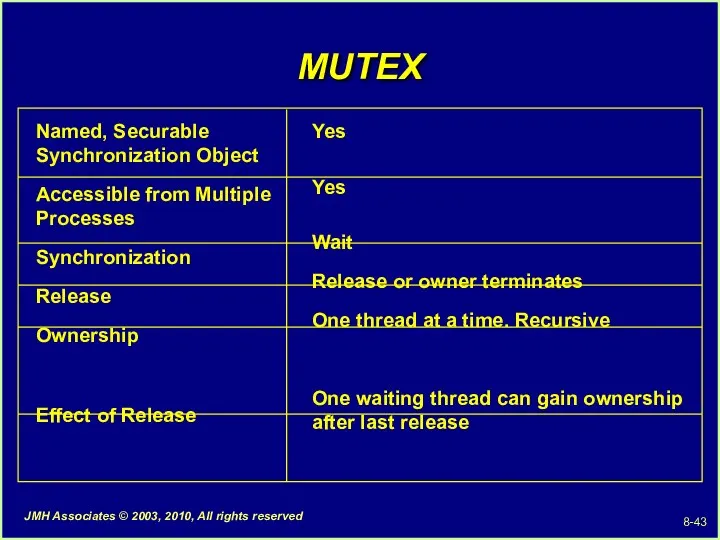
MUTEX
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Release or owner terminates
One
MUTEX
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Release or owner terminates
One
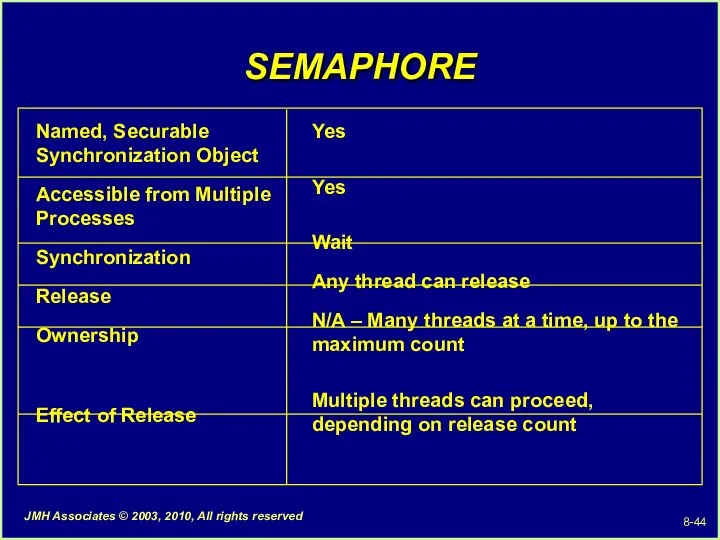
SEMAPHORE
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Any thread can release
N/A
SEMAPHORE
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Any thread can release
N/A
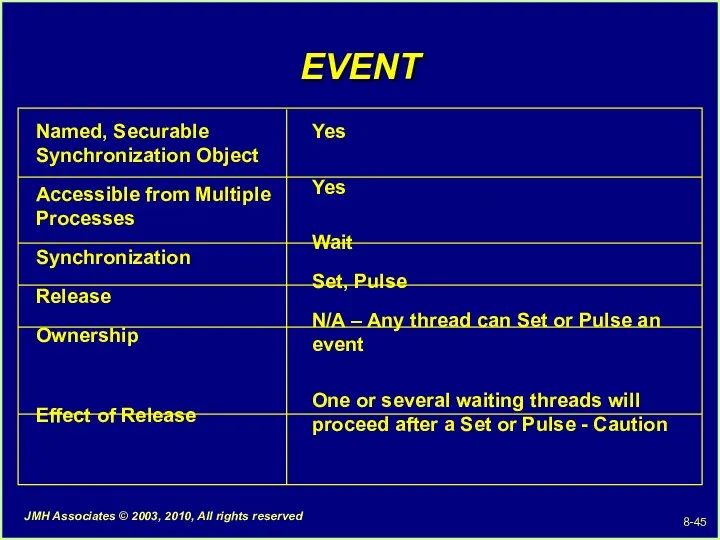
EVENT
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Set, Pulse
N/A – Any
EVENT
Named, Securable Synchronization Object
Accessible from Multiple
Processes
Synchronization
Release
Ownership
Effect of Release
Yes
Yes
Wait
Set, Pulse
N/A – Any
Part X - Lab/Demo Exercise 8-1
Create two working threads: A producer
Part X - Lab/Demo Exercise 8-1
Create two working threads: A producer
Part XI - Condition Variable Model
Using Models (or Patterns)
Use well-understood and
Part XI - Condition Variable Model
Using Models (or Patterns)
Use well-understood and
Events and Mutexes Together (1 of 2)
Similar to POSIX Pthreads
Illustrated with
Events and Mutexes Together (1 of 2)
Similar to POSIX Pthreads
Illustrated with
Events and Mutexes Together (2 of 2)
One thread (producer) locks the
Events and Mutexes Together (2 of 2)
One thread (producer) locks the
The Condition Variable Model (1 of 4)
Several key elements:
Data structure of
The Condition Variable Model (1 of 4)
Several key elements:
Data structure of
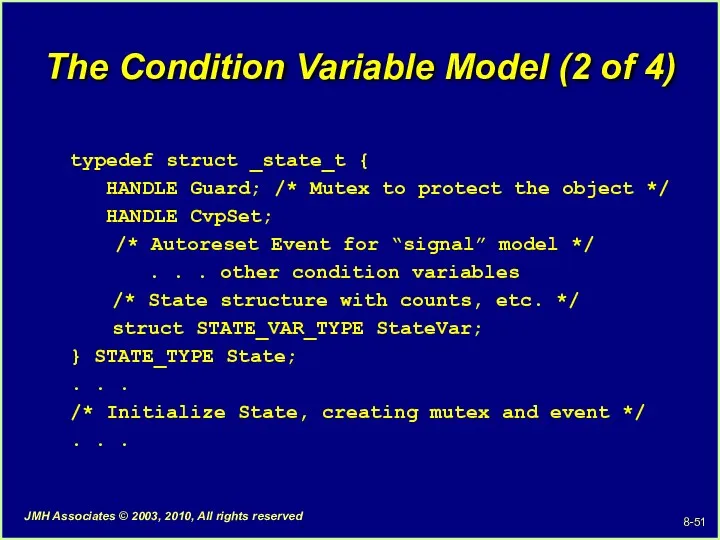
The Condition Variable Model (2 of 4)
typedef struct _state_t {
HANDLE
The Condition Variable Model (2 of 4)
typedef struct _state_t {
HANDLE
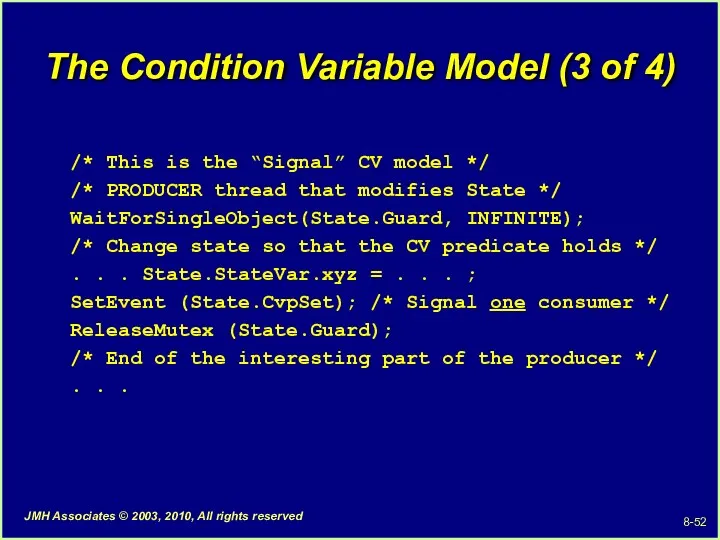
The Condition Variable Model (3 of 4)
/* This is the “Signal”
The Condition Variable Model (3 of 4)
/* This is the “Signal”
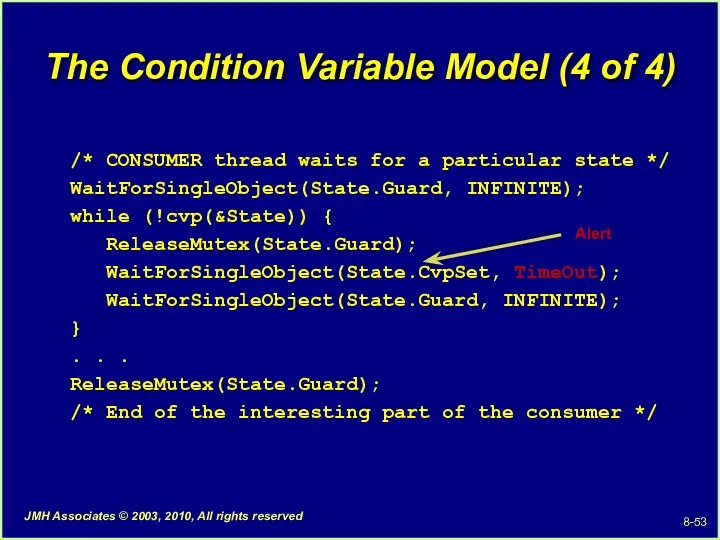
The Condition Variable Model (4 of 4)
/* CONSUMER thread waits for
The Condition Variable Model (4 of 4)
/* CONSUMER thread waits for
Condition Variable Model Comments
Three essential steps of the loop in the
Condition Variable Model Comments
Three essential steps of the loop in the
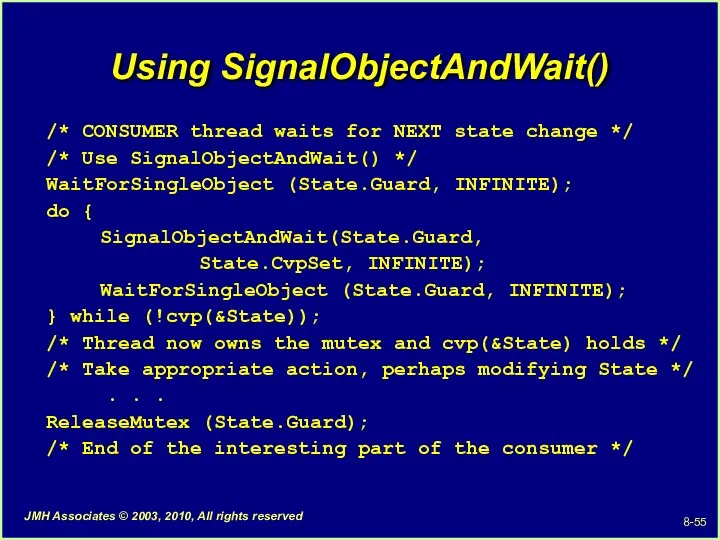
Using SignalObjectAndWait()
/* CONSUMER thread waits for NEXT state change */
/* Use
Using SignalObjectAndWait()
/* CONSUMER thread waits for NEXT state change */
/* Use
CV Model Variation
In producer/consumer code, ONE consumer is released
Signal CV model
Auto-reset
CV Model Variation
In producer/consumer code, ONE consumer is released
Signal CV model
Auto-reset
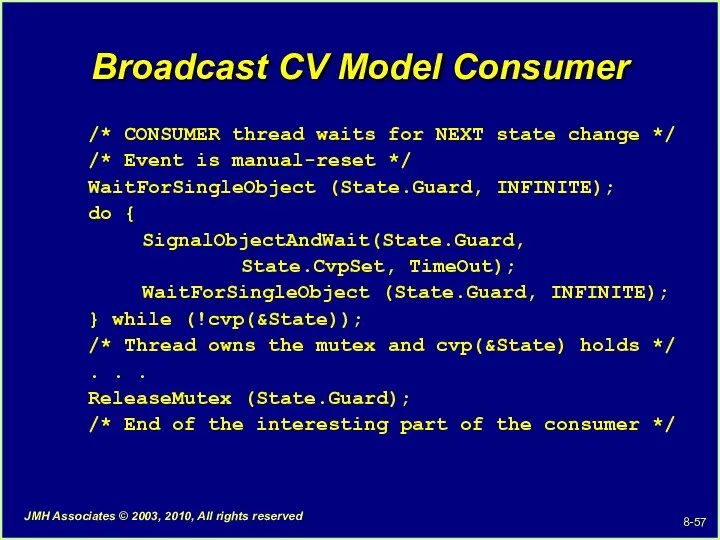
Broadcast CV Model Consumer
/* CONSUMER thread waits for NEXT state change
Broadcast CV Model Consumer
/* CONSUMER thread waits for NEXT state change
Part XII - Multithreading: Designing, Debugging, Testing Hints
Avoiding Incorrect Code (1
Part XII - Multithreading: Designing, Debugging, Testing Hints
Avoiding Incorrect Code (1
Avoiding Incorrect Code (2 of 3)
Avoid relying on “thread inertia”
Never bet
Avoiding Incorrect Code (2 of 3)
Avoid relying on “thread inertia”
Never bet
Avoiding Incorrect Code (3 of 3)
Beware of sharing stacks and related
Avoiding Incorrect Code (3 of 3)
Beware of sharing stacks and related
Part XIII - Lab 8-2
Debug and test the ThreeStage pipeline implementation
Two
Part XIII - Lab 8-2
Debug and test the ThreeStage pipeline implementation
Two
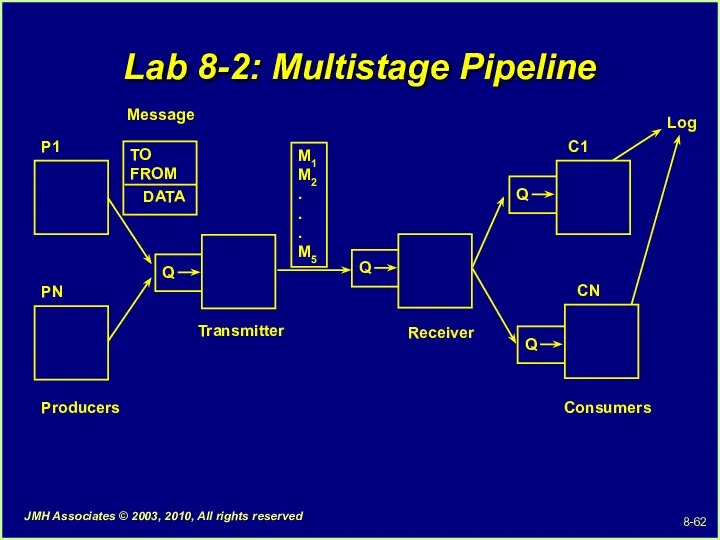
Lab 8-2: Multistage Pipeline
Q
Q
Transmitter
Receiver
Consumers
Q
M1
M2
.
.
.
M5
P1
Producers
PN
Message
TO
FROM
DATA
Log
C1
CN
Lab 8-2: Multistage Pipeline
Q
Q
Transmitter
Receiver
Consumers
Q
M1
M2
.
.
.
M5
P1
Producers
PN
Message
TO
FROM
DATA
Log
C1
CN
 Построение диаграмм в электронных таблицах. 8 класс
Построение диаграмм в электронных таблицах. 8 класс Наследование. Основы наследования. Лекция №8
Наследование. Основы наследования. Лекция №8 PowerPoint программасы тест
PowerPoint программасы тест Национальная программа сохранения библиотечных фондов
Национальная программа сохранения библиотечных фондов Программирование. Лекция 1
Программирование. Лекция 1 Электронные системы тестирования
Электронные системы тестирования Инструкция – настройки телефона
Инструкция – настройки телефона Применение ГИС в оперативном управлении и планировании чрезвычайных ситуаций
Применение ГИС в оперативном управлении и планировании чрезвычайных ситуаций Сортировка одномерного массива
Сортировка одномерного массива Представление чисел в компьютере. Математические основы информатики
Представление чисел в компьютере. Математические основы информатики Безопасный Интернет
Безопасный Интернет Правила заполнения таблицы
Правила заполнения таблицы История киберспорта
История киберспорта Этапы развития информационных технологий
Этапы развития информационных технологий Электронный процессор MS Excel. Создание диаграмм
Электронный процессор MS Excel. Создание диаграмм Системное программное обеспечение. (Лекция 8)
Системное программное обеспечение. (Лекция 8) Базы данных SQL
Базы данных SQL Введение в теорию информации и кодирования
Введение в теорию информации и кодирования 01 Лекция - Что такое DVB
01 Лекция - Что такое DVB Роль графического дизайнера в мультипликации
Роль графического дизайнера в мультипликации Қолданбалы программа Fine Reader
Қолданбалы программа Fine Reader Технология беспроводной связи Bluetooth и Wi-Fi
Технология беспроводной связи Bluetooth и Wi-Fi Сказка Смайлик
Сказка Смайлик Подготовка к ЕГЭ. Задание №27
Подготовка к ЕГЭ. Задание №27 Программирование (C++)
Программирование (C++) Сущность и понятие информационной безопасности (ИБ). Место информационной безопасности в национальной безопасности страны
Сущность и понятие информационной безопасности (ИБ). Место информационной безопасности в национальной безопасности страны Қабырғалық баяндама. Постер жасауға арналған веб сайттар
Қабырғалық баяндама. Постер жасауға арналған веб сайттар Типология интернет-СМИ
Типология интернет-СМИ