- История вертолёта

Содержание
- 3. Патрульный Ка-226
- 5. Многоцелевой вертолёт Ми-38 на выставке МАКС-2005
- 7. Ми-8 заходит на посадку
- 8. Вертолёт — винтокрылый летательный аппарат — винтокрылый летательный аппарат, у которого необходимые для полёта подъёмная сила
- 9. Этимология Вертолёт в современном понимании этого слова до войныВертолёт в современном понимании этого слова до войны
- 10. Слово «вертолёт» появилось в 1929 годуСлово «вертолёт» появилось в 1929 году, когда было применено Н. И.
- 11. Не представляется верным утверждение Л. А. Введенской и Н. П. Колесникова, что, «когда изобрели летательный аппарат,
- 12. Существует версия происхождения слова «вертолёт» от названия компании-производителя вертолётов «Vertol» (название, в свою очередь, произошло от
- 13. Основные принципы
- 14. Ми-8 — многоцелевой вертолёт
- 16. Ми-10К — вертолёт-кран
- 18. Четырехмест- ный вертолет Robinson-R44
- 19. Аналогично крылу самолета лопасти несущего винта вертолета находятся под углом к плоскости вращения винта, который называется
- 20. Лопасти вертолета как правило во всех режимах полета вращаются с фиксированной частотой, увеличение или уменьшение мощности
- 21. В качестве рулевого устройства традиционно используется вертикальный рулевой винтВ качестве рулевого устройства традиционно используется вертикальный рулевой
- 22. Также существуют варианты с расположением рулевого винта на крыле вертолета, при этом винт не только противодействует
- 23. В случае, если винт приводится во вращение реактивными двигателями, закреплёнными на самих лопастях, вращающий момент почти
- 24. При этом половина винта с наступающими лопастями по отношению к набегающему воздушному потоку под действием этого
- 25. Кроме того, для улучшения устойчивости во время полета, повышения максимальной скорости и грузоподъемности применяют дополнительные крылья
- 26. Несущий винт создаёт вибрацию, угрожающую разрушением конструкции. Поэтому в большинстве случаев применяется активная система гашения возникающих
- 27. Основные части вертолета
- 28. Основные части вертолета
- 29. Несущий винт предназначен для создания подъемной силы и пропульсивной сил, а также управления полетом. Он состоит
- 30. Автомат перекоса обеспечивает управление общим и циклическим шагом несущего винта, передавая управляющий сигнал от цепи управления
- 31. Фюзеляж служит для размещения экипажа, пассажиров, грузов, оборудования, топлива и т.д. К фюзеляжу крепятся шасси, подредукторные
- 32. Взлетно-посадочные устройства служат для стоянки вертолета, передвижения его по земле и гашения кинетической энергии удара при
- 33. Управление
- 34. Органы управления вертолёта: ручка циклического шага, ручка общего шага, педали. Управление по кренуУправление по крену и
- 35. Управление по рысканьюУправление по рысканью разнится в зависимости от аэродинамической схемы вертолёта и может быть реализовано
- 36. Существенно, что, в отличие от самолётов, в вертолёте применяется не прямое управление мощностью двигателя, но опосредованное.
- 37. Несмотря на наличие такой автоматической системы управления, в ряде случает все же требуется вмешательство летчика (прямое
- 38. На двухдвигательных вертолётах может также устанавливаться система прямого раздельного управления двигателями. Она используется как резервная, на
- 39. Преимущества и недостатки Главным достоинством является способность совершать взлёт и посадку по вертикали — вертолёт может
- 40. Основные недостатки присущие всей винтокрылой технике по сравнению с самолётамиОсновные недостатки присущие всей винтокрылой технике по
- 41. Классификация
- 42. Транспортный вертолёт Ми-26 — самый большой из ныне действующих
- 43. Ми-12 — двухвинтовой вертолёт поперечной схемы
- 44. Як-24 — двухвинтовой вертолёт продольной схемы
- 45. Вертолёты обычно разделяют по аэродинамической схеме, по грузоподъёмности, по назначению.
- 46. Классификация по аэродинамической схеме Одновинтовые с рулевым винтом. Для компенсации реактивного момента используется рулевой винт, создающий
- 47. Одновинтовые с реактивным принципом вращения лопастей. Также именуются реактивными вертолётами. Двигатели расположены на лопастях и на
- 48. Двухвинтовые продольной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых винтов, вращающихся в противоположные
- 49. Двухвинтовые соосной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых винтов вращающихся в противоположные
- 50. Классификация по взлётному весу Сверхлёгкие — вертолёты со взлётным весом до 1000 кг; Лёгкие — вертолёты
- 51. Классификация по назначению Гражданские вертолёты могут быть разделены на следующие типы: Многоцелевые — предназначены для перевозки
- 52. Военные вертолеты условно различаются на: Транспортные; Разведывательные; Боевые; Специальные.
- 53. Классификация FAI Все вертолёты отнесены FAI к классу E-1. Лёгкие вертолеты дополнительно разделены на подклассы: E-1a
- 54. Предыстория Проект д’Амекура
- 55. Первые идеи (400) Первое упоминание о вертикально взлетающем аппарате появилось в Китае в 400 г.н.э. Аппарат
- 56. Действующий физический прибор (1754) «Прототип» М. В. Ломоносова. 1754
- 57. Независимо от идеи летательного аппарата Леонардо да Винчи, труды которого были найдены много позже, М. В.
- 58. № 4...Высокопочтенный советник Ломоносов показал изобретённую им машину, называемую им аэродинамической [воздухобежной], которая должна употребляться для
- 59. Машина подвешивалась на шнуре, протянутом по двум блокам, и удерживалась в равновесии грузиками, подвешенными с противоположного
- 60. — «Воздухоплавание и авиация в России до 1917 г.»[10] Проект д’Амекура (ок. 1860) В 1853—1860 годах
- 61. Первые успехи Главной причиной появления вертолетов, которые смогли оторваться от земли, стало применение в качестве силовой
- 62. Аппарат имел массу 578 кг и был оснащён двигателем Antoinette мощностью 45 л.с. Gyroplane имел 4
- 63. Первый лётчик (13 ноября 1907) Первым человеком, поднявшимся в воздух на вертолёте, был французскийПервым человеком, поднявшимся
- 64. Схема с автоматом перекоса (1911) До изобретения автомата перекосаДо изобретения автомата перекоса управлять полетом вертолета предполагалось
- 65. Устойчиво управляемый полёт (1922) В 1922 годуВ 1922 году профессор Георгий Ботезат, эмигрировавший после революции из
- 66. Хронология 24 апреля 1924 года П. Пескара установил первый мировой рекорд дальности полёта на вертолёте —
- 67. 21 декабря 1935 года21 декабря 1935 года вертолёт соосной схемы Gyroplane конструкции Луи Бреге21 декабря 1935
- 68. В 1942 году немецкий вертолёт Flettner Fl 282В 1942 году немецкий вертолёт Flettner Fl 282 (с
- 69. В июле 1945 годаВ июле 1945 года на армейском вертолёте R-6A был совершен беспосадочный перелёт протяженностью
- 70. 26 мая26 мая 200526 мая 2005 вертолёт под управлением французского пилота Дидье Дельсаля26 мая 2005 вертолёт
- 71. В царской России Игорь Сикорский построил в России два вертолёта[13]Игорь Сикорский построил в России два вертолёта[13]—
- 73. В СССР «Геликоптерная группа» В 1926 годуВ 1926 году в РСФСРВ 1926 году в РСФСР в
- 74. Первый серийный Первый серийный советский вертолёт — Ми-1Первый серийный советский вертолёт — Ми-1 разработки ОКБПервый серийный
- 75. См. также История авиации Автожир Авторотация Винтокрыл Турболёт Вертолётоносец Радиоуправляемая модель вертолёта Симулятор вертолётов Список вертолётов
- 76. Ссылки Историю развития вертолета Издательство «Вертолет»: 100 лет на службе людям Вертолёты мира. Фото, описание, форум
- 77. Примечания ↑ Этимологический словарь русского языка. Т. 1. Под ред. Н. М. Шанского. — М., 1972.
- 78. ↑ История появления в СССР образцов американской вертолётной техники от компании История появления в СССР образцов
- 79. ↑ Ломоносов «Аэродинамика» (Lomonosov «Aerodynamic» — All the World’s Rotorcraft) ↑ Цитаты из А. С. Билярского
- 80. Вертолет МИ-8.
- 84. Ми-34.
- 92. вертолет КА-32.
- 106. Скачать презентацию
Патрульный Ка-226
Патрульный Ка-226

Многоцелевой вертолёт Ми-38 на выставке МАКС-2005
Многоцелевой вертолёт Ми-38 на выставке МАКС-2005

Ми-8 заходит на посадку
Ми-8 заходит на посадку
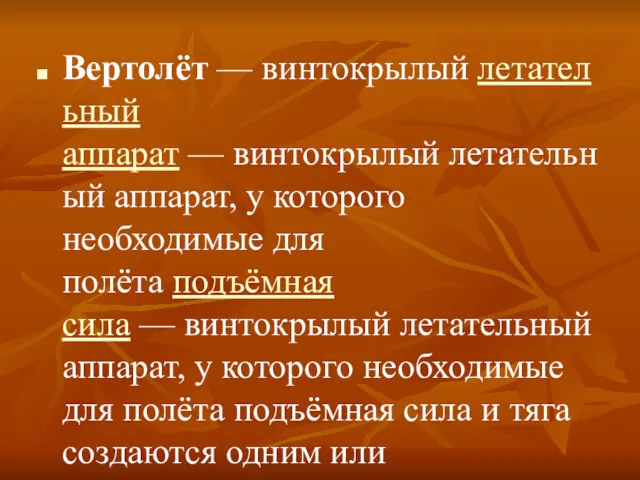
Вертолёт — винтокрылый летательный аппарат — винтокрылый летательный аппарат, у которого необходимые для полёта подъёмная сила — винтокрылый летательный аппарат, у
Вертолёт — винтокрылый летательный аппарат — винтокрылый летательный аппарат, у которого необходимые для полёта подъёмная сила — винтокрылый летательный аппарат, у
Этимология
Вертолёт в современном понимании этого слова до войныВертолёт в современном понимании этого
Этимология
Вертолёт в современном понимании этого слова до войныВертолёт в современном понимании этого
Слово «вертолёт» появилось в 1929 годуСлово «вертолёт» появилось в 1929 году, когда было
Слово «вертолёт» появилось в 1929 годуСлово «вертолёт» появилось в 1929 году, когда было
Не представляется верным утверждение Л. А. Введенской и Н. П. Колесникова, что, «когда изобрели летательный
Не представляется верным утверждение Л. А. Введенской и Н. П. Колесникова, что, «когда изобрели летательный
Существует версия происхождения слова «вертолёт» от названия компании-производителя вертолётов «Vertol» (название,
Существует версия происхождения слова «вертолёт» от названия компании-производителя вертолётов «Vertol» (название,
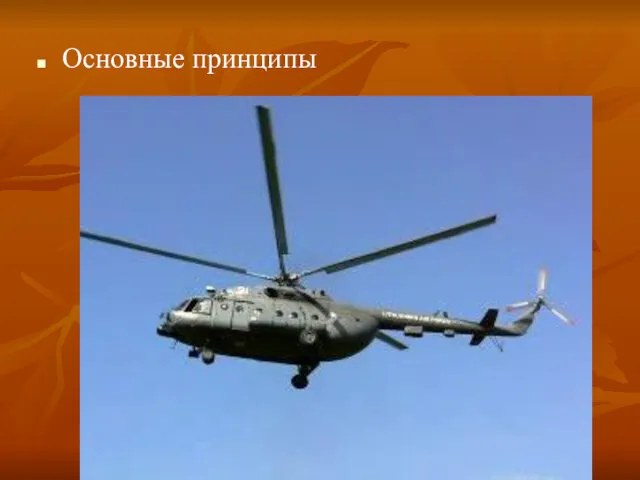
Основные принципы
Основные принципы
Ми-8 — многоцелевой вертолёт
Ми-8 — многоцелевой вертолёт

Ми-10К — вертолёт-кран
Ми-10К — вертолёт-кран

Четырехмест-
ный вертолет Robinson-R44
Четырехмест-
ный вертолет Robinson-R44
Аналогично крылу самолета лопасти несущего винта вертолета находятся под углом к плоскости вращения
Аналогично крылу самолета лопасти несущего винта вертолета находятся под углом к плоскости вращения
Лопасти вертолета как правило во всех режимах полета вращаются с фиксированной
Лопасти вертолета как правило во всех режимах полета вращаются с фиксированной
В качестве рулевого устройства традиционно используется вертикальный рулевой винтВ качестве рулевого устройства
В качестве рулевого устройства традиционно используется вертикальный рулевой винтВ качестве рулевого устройства
Также существуют варианты с расположением рулевого винта на крыле вертолета, при этом
Также существуют варианты с расположением рулевого винта на крыле вертолета, при этом
В случае, если винт приводится во вращение реактивными двигателями, закреплёнными на самих
В случае, если винт приводится во вращение реактивными двигателями, закреплёнными на самих
При этом половина винта с наступающими лопастями по отношению к набегающему
При этом половина винта с наступающими лопастями по отношению к набегающему
Кроме того, для улучшения устойчивости во время полета, повышения максимальной скорости
Кроме того, для улучшения устойчивости во время полета, повышения максимальной скорости
Несущий винт создаёт вибрацию, угрожающую разрушением конструкции. Поэтому в большинстве случаев применяется
Несущий винт создаёт вибрацию, угрожающую разрушением конструкции. Поэтому в большинстве случаев применяется
Основные части вертолета
Основные части вертолета

Основные части вертолета
Основные части вертолета
Несущий винт предназначен для создания подъемной силы и пропульсивной сил, а также
Несущий винт предназначен для создания подъемной силы и пропульсивной сил, а также
Автомат перекоса обеспечивает управление общим и циклическим шагом несущего винта, передавая управляющий
Автомат перекоса обеспечивает управление общим и циклическим шагом несущего винта, передавая управляющий
Фюзеляж служит для размещения экипажа, пассажиров, грузов, оборудования, топлива и т.д. К
Фюзеляж служит для размещения экипажа, пассажиров, грузов, оборудования, топлива и т.д. К
Взлетно-посадочные устройства служат для стоянки вертолета, передвижения его по земле и гашения
Взлетно-посадочные устройства служат для стоянки вертолета, передвижения его по земле и гашения

Управление
Управление
Органы управления вертолёта: ручка циклического шага, ручка общего шага, педали.
Управление по кренуУправление
Органы управления вертолёта: ручка циклического шага, ручка общего шага, педали.
Управление по кренуУправление
Управление по рысканьюУправление по рысканью разнится в зависимости от аэродинамической схемы вертолёта и может быть реализовано
Управление по рысканьюУправление по рысканью разнится в зависимости от аэродинамической схемы вертолёта и может быть реализовано
Существенно, что, в отличие от самолётов, в вертолёте применяется не прямое
Существенно, что, в отличие от самолётов, в вертолёте применяется не прямое
Несмотря на наличие такой автоматической системы управления, в ряде случает все
Несмотря на наличие такой автоматической системы управления, в ряде случает все
На двухдвигательных вертолётах может также устанавливаться система прямого раздельного управления двигателями.
На двухдвигательных вертолётах может также устанавливаться система прямого раздельного управления двигателями.
Преимущества и недостатки
Главным достоинством является способность совершать взлёт и посадку по вертикали — вертолёт может
Преимущества и недостатки
Главным достоинством является способность совершать взлёт и посадку по вертикали — вертолёт может
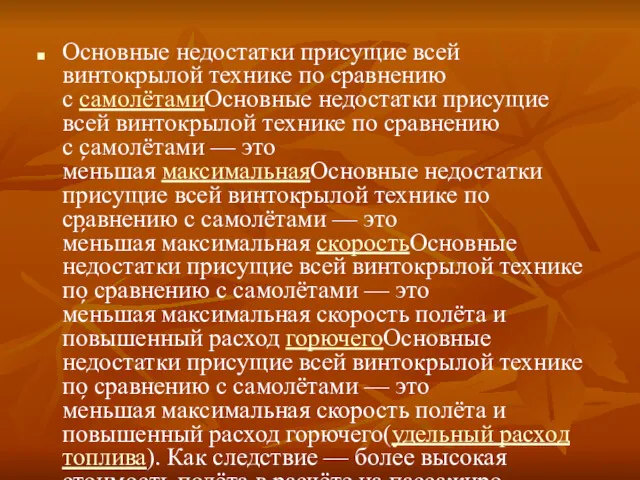
Основные недостатки присущие всей винтокрылой технике по сравнению с самолётамиОсновные недостатки присущие
Основные недостатки присущие всей винтокрылой технике по сравнению с самолётамиОсновные недостатки присущие

Классификация
Классификация
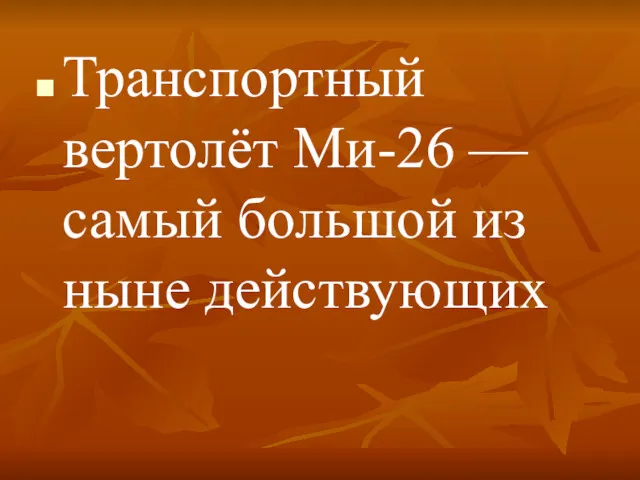
Транспортный вертолёт Ми-26 — самый большой из ныне действующих
Транспортный вертолёт Ми-26 — самый большой из ныне действующих

Ми-12 — двухвинтовой вертолёт поперечной схемы
Ми-12 — двухвинтовой вертолёт поперечной схемы

Як-24 — двухвинтовой вертолёт продольной схемы
Як-24 — двухвинтовой вертолёт продольной схемы
Вертолёты обычно разделяют по аэродинамической схеме, по грузоподъёмности, по назначению.
Вертолёты обычно разделяют по аэродинамической схеме, по грузоподъёмности, по назначению.
Классификация по аэродинамической схеме
Одновинтовые с рулевым винтом. Для компенсации реактивного момента используется рулевой винт,
Классификация по аэродинамической схеме
Одновинтовые с рулевым винтом. Для компенсации реактивного момента используется рулевой винт,
Одновинтовые с реактивным принципом вращения лопастей. Также именуются реактивными вертолётами. Двигатели расположены
Одновинтовые с реактивным принципом вращения лопастей. Также именуются реактивными вертолётами. Двигатели расположены
Двухвинтовые продольной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых
Двухвинтовые продольной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых
Двухвинтовые соосной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых
Двухвинтовые соосной схемы. Компенсация реактивного момента происходит за счёт наличия двух одинаковых
Классификация по взлётному весу
Сверхлёгкие — вертолёты со взлётным весом до 1000 кг;
Лёгкие — вертолёты
Классификация по взлётному весу
Сверхлёгкие — вертолёты со взлётным весом до 1000 кг;
Лёгкие — вертолёты
Классификация по назначению
Гражданские вертолёты могут быть разделены на следующие типы:
Многоцелевые — предназначены
Классификация по назначению
Гражданские вертолёты могут быть разделены на следующие типы:
Многоцелевые — предназначены
Военные вертолеты условно различаются на:
Транспортные;
Разведывательные;
Боевые;
Специальные.
Военные вертолеты условно различаются на:
Транспортные;
Разведывательные;
Боевые;
Специальные.
Классификация FAI
Все вертолёты отнесены FAI к классу E-1.
Лёгкие вертолеты дополнительно разделены на подклассы:
E-1a —
Классификация FAI
Все вертолёты отнесены FAI к классу E-1.
Лёгкие вертолеты дополнительно разделены на подклассы:
E-1a —

Предыстория
Проект д’Амекура
Предыстория
Проект д’Амекура
Первые идеи (400)
Первое упоминание о вертикально взлетающем аппарате появилось в Китае
Первые идеи (400)
Первое упоминание о вертикально взлетающем аппарате появилось в Китае

Действующий физический прибор (1754)
«Прототип» М. В. Ломоносова. 1754
Действующий физический прибор (1754)
«Прототип» М. В. Ломоносова. 1754
Независимо от идеи летательного аппарата Леонардо да Винчи, труды которого были
Независимо от идеи летательного аппарата Леонардо да Винчи, труды которого были
№ 4...Высокопочтенный советник Ломоносов показал изобретённую им машину, называемую им аэродинамической
№ 4...Высокопочтенный советник Ломоносов показал изобретённую им машину, называемую им аэродинамической
Машина подвешивалась на шнуре, протянутом по двум блокам, и удерживалась в
Машина подвешивалась на шнуре, протянутом по двум блокам, и удерживалась в
![— «Воздухоплавание и авиация в России до 1917 г.»[10] Проект](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/160024/slide-59.jpg)
— «Воздухоплавание и авиация в России до 1917 г.»[10]
Проект д’Амекура (ок. 1860)
В
— «Воздухоплавание и авиация в России до 1917 г.»[10]
Проект д’Амекура (ок. 1860)
В
Первые успехи
Главной причиной появления вертолетов, которые смогли оторваться от земли, стало
Первые успехи
Главной причиной появления вертолетов, которые смогли оторваться от земли, стало
Аппарат имел массу 578 кг и был оснащён двигателем Antoinette мощностью 45
Аппарат имел массу 578 кг и был оснащён двигателем Antoinette мощностью 45
Первый лётчик (13 ноября 1907)
Первым человеком, поднявшимся в воздух на вертолёте,
Первый лётчик (13 ноября 1907)
Первым человеком, поднявшимся в воздух на вертолёте,
Схема с автоматом перекоса (1911)
До изобретения автомата перекосаДо изобретения автомата перекоса управлять полетом вертолета
Схема с автоматом перекоса (1911)
До изобретения автомата перекосаДо изобретения автомата перекоса управлять полетом вертолета
Устойчиво управляемый полёт (1922)
В 1922 годуВ 1922 году профессор Георгий Ботезат, эмигрировавший после революции из
Устойчиво управляемый полёт (1922)
В 1922 годуВ 1922 году профессор Георгий Ботезат, эмигрировавший после революции из
Хронология
24 апреля 1924 года П. Пескара установил первый мировой рекорд дальности полёта
Хронология
24 апреля 1924 года П. Пескара установил первый мировой рекорд дальности полёта
21 декабря 1935 года21 декабря 1935 года вертолёт соосной схемы Gyroplane конструкции Луи Бреге21 декабря 1935
21 декабря 1935 года21 декабря 1935 года вертолёт соосной схемы Gyroplane конструкции Луи Бреге21 декабря 1935
В 1942 году немецкий вертолёт Flettner Fl 282В 1942 году немецкий вертолёт Flettner
В 1942 году немецкий вертолёт Flettner Fl 282В 1942 году немецкий вертолёт Flettner
В июле 1945 годаВ июле 1945 года на армейском вертолёте R-6A был совершен беспосадочный перелёт протяженностью
В июле 1945 годаВ июле 1945 года на армейском вертолёте R-6A был совершен беспосадочный перелёт протяженностью
26 мая26 мая 200526 мая 2005 вертолёт под управлением французского пилота Дидье Дельсаля26 мая 2005 вертолёт под
26 мая26 мая 200526 мая 2005 вертолёт под управлением французского пилота Дидье Дельсаля26 мая 2005 вертолёт под
![В царской России Игорь Сикорский построил в России два вертолёта[13]Игорь](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/160024/slide-70.jpg)
В царской России
Игорь Сикорский построил в России два вертолёта[13]Игорь Сикорский построил в России
В царской России
Игорь Сикорский построил в России два вертолёта[13]Игорь Сикорский построил в России

В СССР
«Геликоптерная группа»
В 1926 годуВ 1926 году в РСФСРВ 1926 году в РСФСР в ЦАГИВ 1926 году в РСФСР в ЦАГИ была сформирована «геликоптерная группа», которую
В СССР
«Геликоптерная группа»
В 1926 годуВ 1926 году в РСФСРВ 1926 году в РСФСР в ЦАГИВ 1926 году в РСФСР в ЦАГИ была сформирована «геликоптерная группа», которую
Первый серийный
Первый серийный советский вертолёт — Ми-1Первый серийный советский вертолёт — Ми-1 разработки ОКБПервый серийный советский вертолёт — Ми-1 разработки ОКБ под
Первый серийный
Первый серийный советский вертолёт — Ми-1Первый серийный советский вертолёт — Ми-1 разработки ОКБПервый серийный советский вертолёт — Ми-1 разработки ОКБ под
См. также
История авиации
Автожир
Авторотация
Винтокрыл
Турболёт
Вертолётоносец
Радиоуправляемая модель вертолёта
Симулятор вертолётов
Список вертолётов
См. также
История авиации
Автожир
Авторотация
Винтокрыл
Турболёт
Вертолётоносец
Радиоуправляемая модель вертолёта
Симулятор вертолётов
Список вертолётов
Ссылки
Историю развития вертолета
Издательство «Вертолет»: 100 лет на службе людям
Вертолёты мира. Фото,
Ссылки
Историю развития вертолета
Издательство «Вертолет»: 100 лет на службе людям
Вертолёты мира. Фото,
Примечания
↑ Этимологический словарь русского языка. Т. 1. Под ред. Н. М. Шанского. — М., 1972.
Примечания
↑ Этимологический словарь русского языка. Т. 1. Под ред. Н. М. Шанского. — М., 1972.
↑ История появления в СССР образцов американской вертолётной техники от компании История появления
↑ История появления в СССР образцов американской вертолётной техники от компании История появления
↑ Ломоносов «Аэродинамика» (Lomonosov «Aerodynamic» — All the World’s Rotorcraft)
↑ Цитаты из А. С. Билярского даны
↑ Ломоносов «Аэродинамика» (Lomonosov «Aerodynamic» — All the World’s Rotorcraft)
↑ Цитаты из А. С. Билярского даны

Вертолет МИ-8.
Вертолет МИ-8.



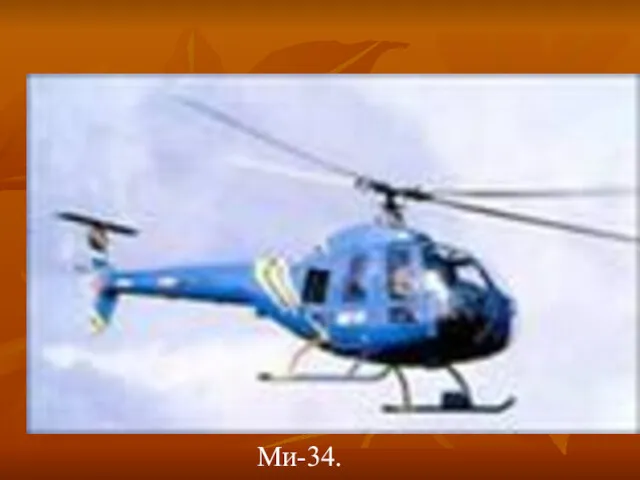
Ми-34.
Ми-34.








вертолет КА-32.
вертолет КА-32.












 История государственного флага России
История государственного флага России Артисты -г ерои Великой Отечественной войны
Артисты -г ерои Великой Отечественной войны Отечественная война 1812 года
Отечественная война 1812 года Спас-на- Крови
Спас-на- Крови Внешняя политика Петра I
Внешняя политика Петра I Культура стародавнього Єгипту
Культура стародавнього Єгипту Внутренняя политика Николая I
Внутренняя политика Николая I Мы казаки – Отечества сыны. История, обычаи и традиции казаков
Мы казаки – Отечества сыны. История, обычаи и традиции казаков Первая мировая война (1914–1918 гг.)
Первая мировая война (1914–1918 гг.) Георгиевская ленточка
Георгиевская ленточка Урок 3 Предпосылки петровских преобразований
Урок 3 Предпосылки петровских преобразований Теория цивилизаций А. Дж.Тойнби
Теория цивилизаций А. Дж.Тойнби Предпосылки преобразований
Предпосылки преобразований Начало реформации в Европе в эпоху Возрождения. Кризис папской власти
Начало реформации в Европе в эпоху Возрождения. Кризис папской власти Первый автомобиль АМО-Ф15
Первый автомобиль АМО-Ф15 Волгоград. Сталинград. 70 лет победе
Волгоград. Сталинград. 70 лет победе Земледельцы Аттики теряют землю и свободу
Земледельцы Аттики теряют землю и свободу Культура Древнего Китая
Культура Древнего Китая Род и семья – исток нравственных отношений
Род и семья – исток нравственных отношений Воспоминания о блокаде Ленинграда
Воспоминания о блокаде Ленинграда Культура Казахстана во второй половине XIX века
Культура Казахстана во второй половине XIX века Разработка урока-конференции Человек на войне с презентацией
Разработка урока-конференции Человек на войне с презентацией Отечественная война 1812 г. Окружающий мир. 4 класс
Отечественная война 1812 г. Окружающий мир. 4 класс Культура Древней Руси
Культура Древней Руси Индия во второй половине XX века
Индия во второй половине XX века Патриарх Никон
Патриарх Никон Усадьба Кусково
Усадьба Кусково Иосиф Виссарионович Сталин
Иосиф Виссарионович Сталин