- Численные методы решения систем уравнений

Содержание
- 2. 3. Численные методы решения систем уравнений 3.1. Основные положения Точные методы – конечные алгоритмы для вычисления
- 3. 3.2. Метод Крамера (решение систем линейных уравнений с помощью обратной матрицы) Неособенная матрица А: Обратная матрица
- 4. 3.3. Метод Гаусса (метод гауссовых исключений) ,
- 5. 3.4. Встроенная функция Lsolve в пакете MathCad
- 6. 3.5. Встроенная функция Find в пакете MathCad
- 7. 3.6. Встроенная функция rref в пакете MathCad
- 8. 3.7. Метод итераций Дана система n линейных уравнений Предполагается, что диагональные коэффициенты отличны от нуля Система
- 9. Теорема сходимости итерационного ряда Теорема. Процесс итерации для линейной системы уравнений сходится к единственному ее решению,
- 10. Следствие 2. Процесс итерации сходится, если выполнены неравенства : 1. 2. Условия окончания итерационного процесса:
- 11. Вычисление норм матриц в пакете MathCad
- 12. 3.8. Метод Зейделя (модификация метода итераций) При вычислении (k+1) приближения неизвестной xi учитываются уже вычисленные ранее
- 13. 3.9. Метода итераций для систем нелинейных уравнений Задана система уравнений и начальные приближения корней x(0)0, x(0)2,
- 14. 4. Интерполирование функций 4.1. Интерполяционная формула Лагранжа Постановка задачи. На отрезке [a,b] заданы n+1 значения аргумента
- 15. Неизвестные ai можно найти методом Крамера Функция Qi(x) должна удовлетворять условиям Её явный вид Тогда полином
- 16. Интерполяционная формула Лагранжа в пакете MathCad
- 17. 4.2. Интерполяционные формулы Ньютона Определения. Конечные разности первого порядка: Δyi = yi+1 – yi Конечные разности
- 18. Пусть для функции, заданной таблично с постоянным шагом, составлена таблица конечных разностей. Будем искать интерполяционный полином
- 19. Найдем коэффициенты a1, ….an : Введем переменную q=(x=x0)/h, (q – число шагов). Тогда первая интерполяционная формула
- 20. Для интерполирования в конце таблицы применяют вторую интерполяционную формулу Ньютона : Введем переменную q=(x-xn)/h, тогда 4.2.2.
- 21. 4.3. Кубическая сплайн-интерполяция На каждом сегменте [xi-1, xi], i=1,2,…n функция S(x) является полиномом третьей степени. Функция
- 22. Коэффициенты ai, bi, ci, di подлежат определению (т.е. нахождению) на всех n элементарных отрезках [xi-1, xi]
- 23. Следующие (n-1) уравнений вытекают из условия непрерывности первых производных в узлах интерполяции Приравнивая правые части в
- 24. Следующие (n-1) уравнений вытекают из условия непрерывности вторых производных в узлах интерполяции Приравнивая правые части в
- 25. На данном этапе у нас имеется 4n неизвестных и (4n-2) уравнений. Оставшиеся 2 уравнения можно получить
- 26. В результате получим
- 28. Скачать презентацию
3. Численные методы решения систем уравнений
3.1. Основные положения
Точные методы – конечные
3. Численные методы решения систем уравнений
3.1. Основные положения
Точные методы – конечные
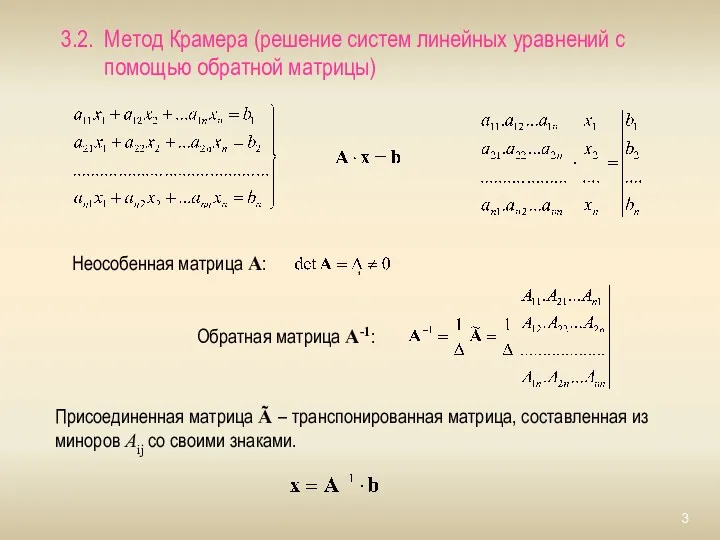
3.2. Метод Крамера (решение систем линейных уравнений с
помощью обратной
3.2. Метод Крамера (решение систем линейных уравнений с
помощью обратной
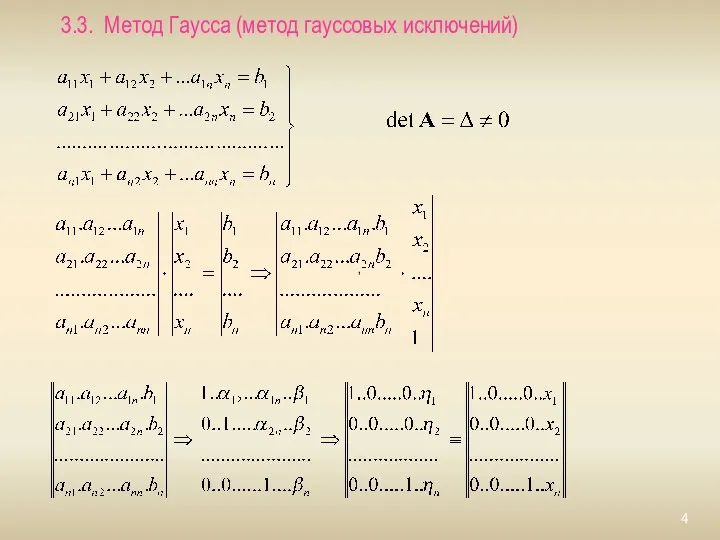
3.3. Метод Гаусса (метод гауссовых исключений)
,
3.3. Метод Гаусса (метод гауссовых исключений)
,
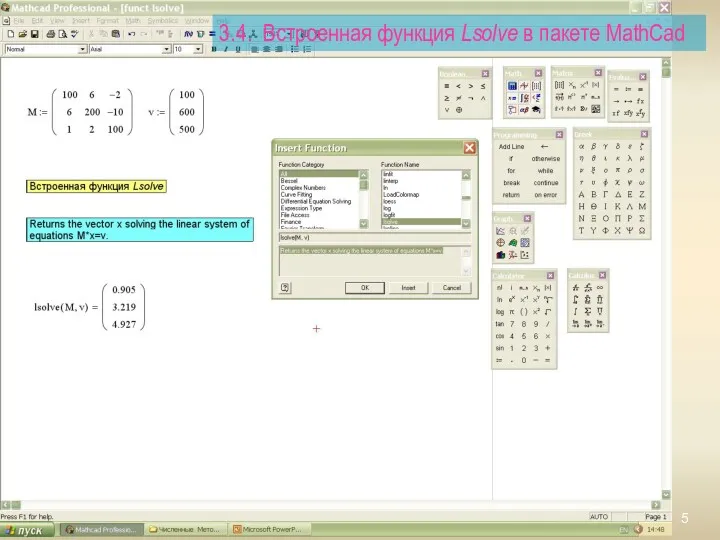
3.4. Встроенная функция Lsolve в пакете MathCad
3.4. Встроенная функция Lsolve в пакете MathCad

3.5. Встроенная функция Find в пакете MathCad
3.5. Встроенная функция Find в пакете MathCad
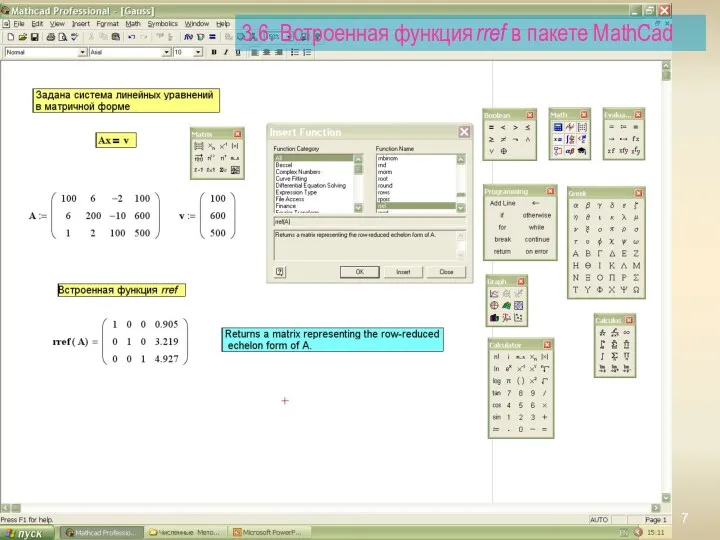
3.6. Встроенная функция rref в пакете MathCad
3.6. Встроенная функция rref в пакете MathCad
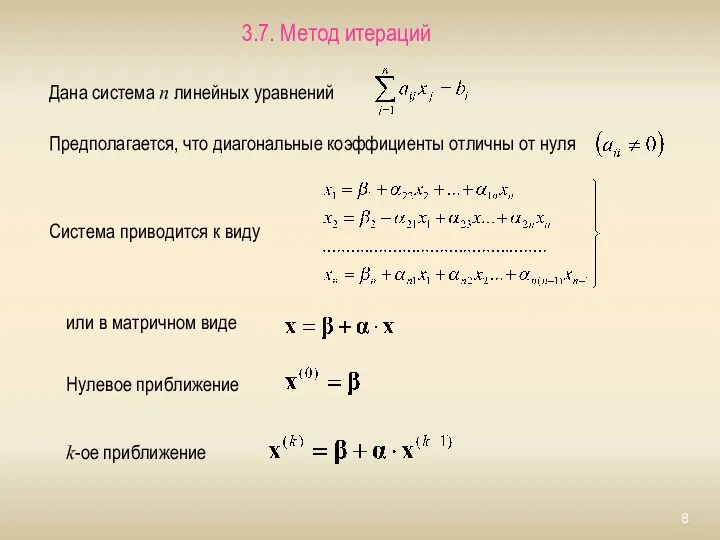
3.7. Метод итераций
Дана система n линейных уравнений
Предполагается, что диагональные коэффициенты
3.7. Метод итераций
Дана система n линейных уравнений
Предполагается, что диагональные коэффициенты
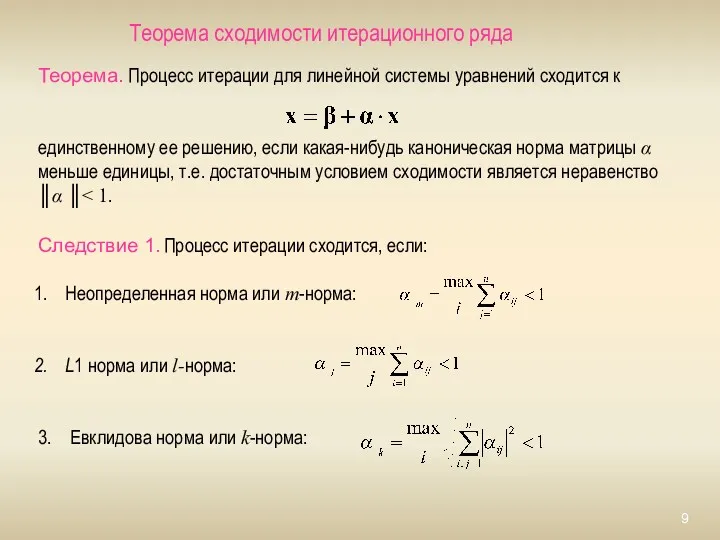
Теорема сходимости итерационного ряда
Теорема. Процесс итерации для линейной системы уравнений сходится
Теорема сходимости итерационного ряда
Теорема. Процесс итерации для линейной системы уравнений сходится
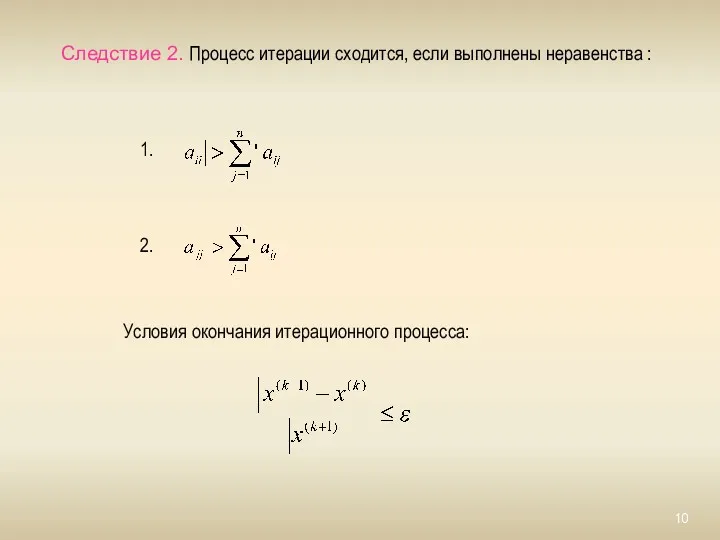
Следствие 2. Процесс итерации сходится, если выполнены неравенства :
1.
2.
Условия окончания итерационного
Следствие 2. Процесс итерации сходится, если выполнены неравенства :
1.
2.
Условия окончания итерационного
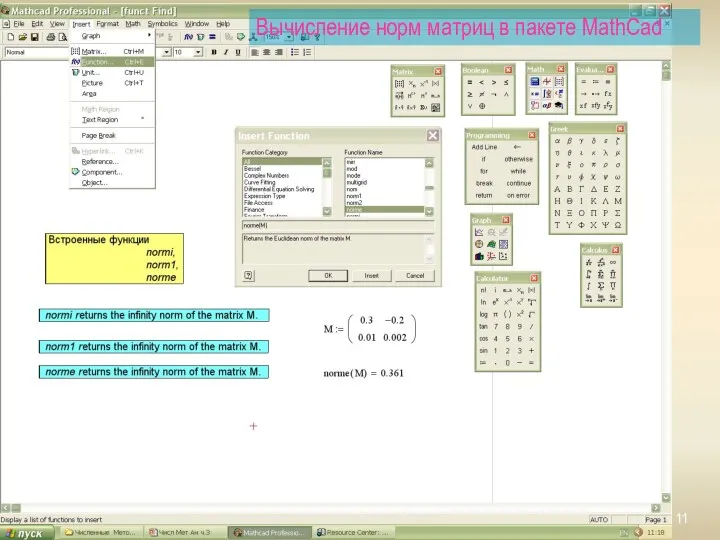
Вычисление норм матриц в пакете MathCad
Вычисление норм матриц в пакете MathCad
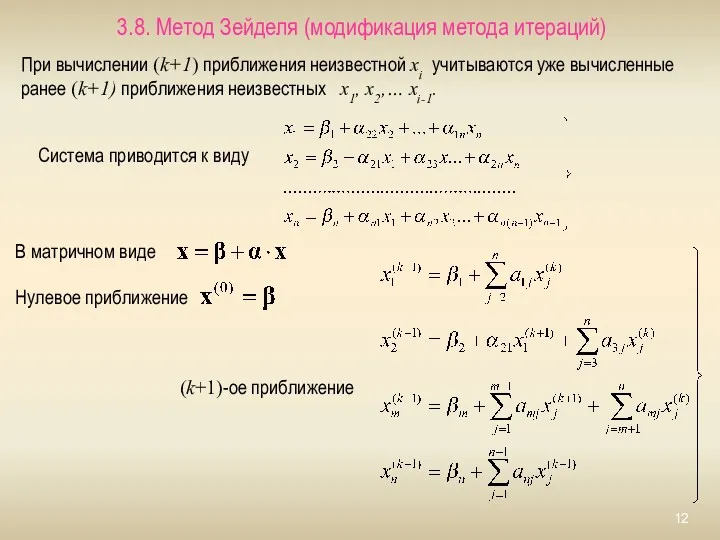
3.8. Метод Зейделя (модификация метода итераций)
При вычислении (k+1) приближения неизвестной xi
3.8. Метод Зейделя (модификация метода итераций)
При вычислении (k+1) приближения неизвестной xi
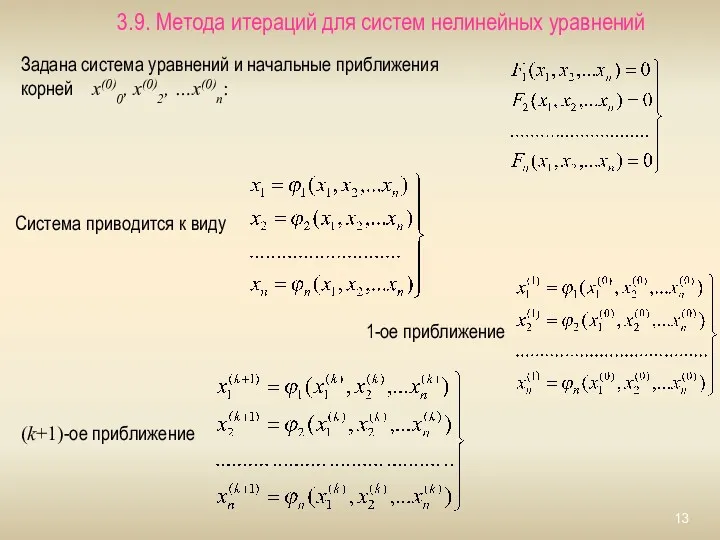
3.9. Метода итераций для систем нелинейных уравнений
Задана система уравнений и начальные
3.9. Метода итераций для систем нелинейных уравнений
Задана система уравнений и начальные
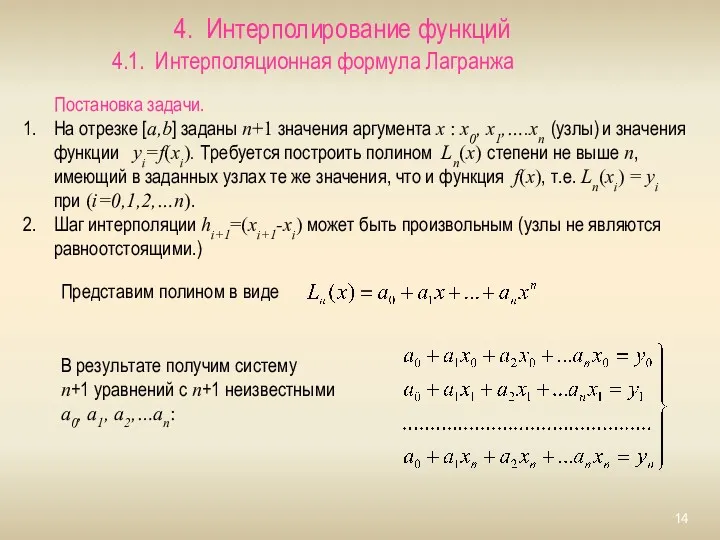
4. Интерполирование функций
4.1. Интерполяционная формула Лагранжа
Постановка задачи.
На отрезке [a,b]
4. Интерполирование функций
4.1. Интерполяционная формула Лагранжа
Постановка задачи.
На отрезке [a,b]
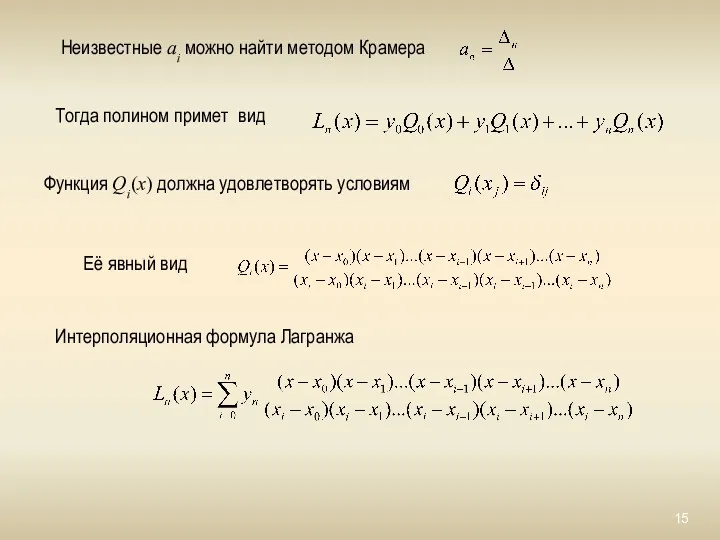
Неизвестные ai можно найти методом Крамера
Функция Qi(x) должна удовлетворять условиям
Её явный
Неизвестные ai можно найти методом Крамера
Функция Qi(x) должна удовлетворять условиям
Её явный
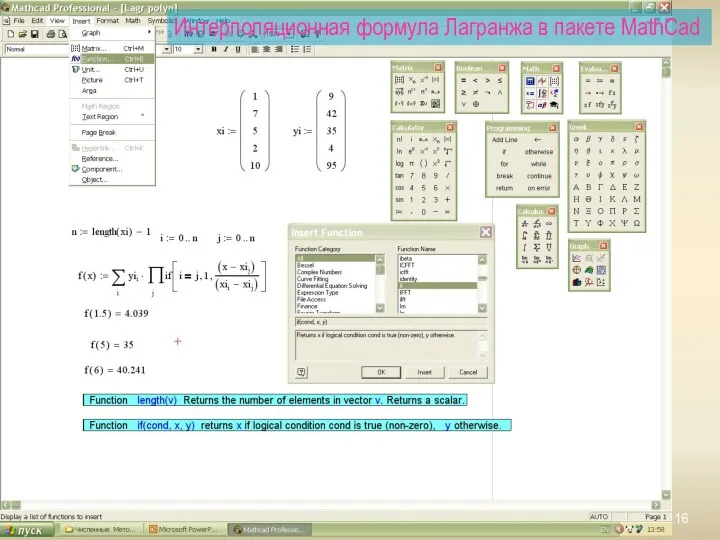
Интерполяционная формула Лагранжа в пакете MathCad
Интерполяционная формула Лагранжа в пакете MathCad
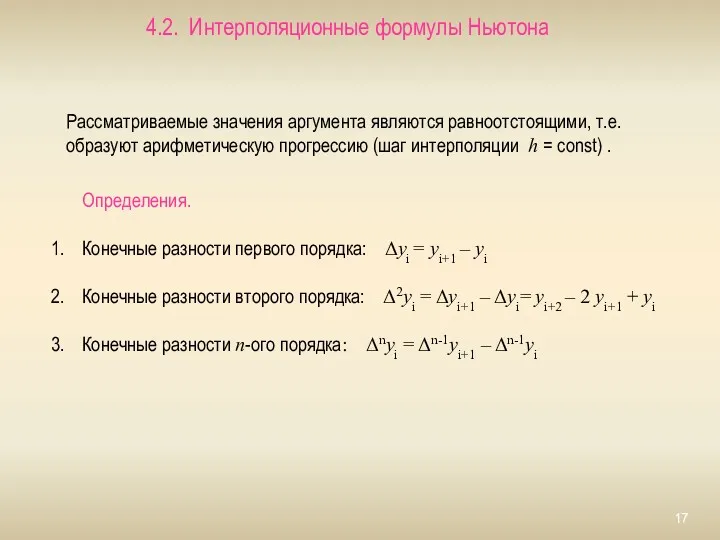
4.2. Интерполяционные формулы Ньютона
Определения.
Конечные разности первого порядка: Δyi =
4.2. Интерполяционные формулы Ньютона
Определения.
Конечные разности первого порядка: Δyi =
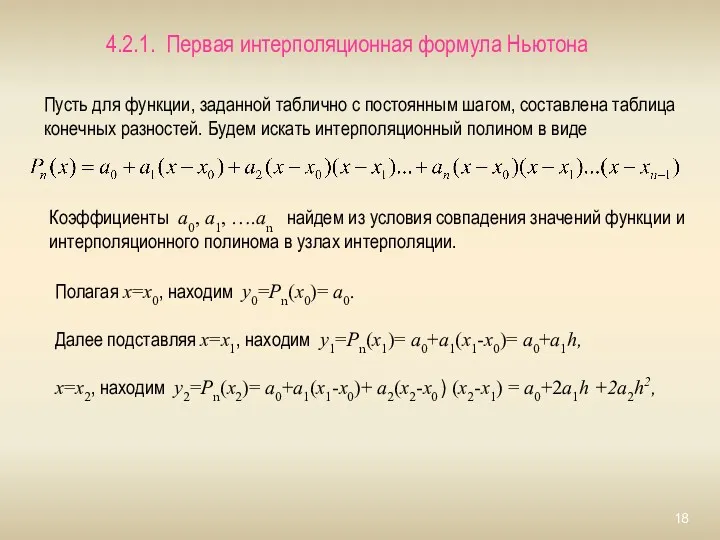
Пусть для функции, заданной таблично с постоянным шагом, составлена таблица конечных
Пусть для функции, заданной таблично с постоянным шагом, составлена таблица конечных
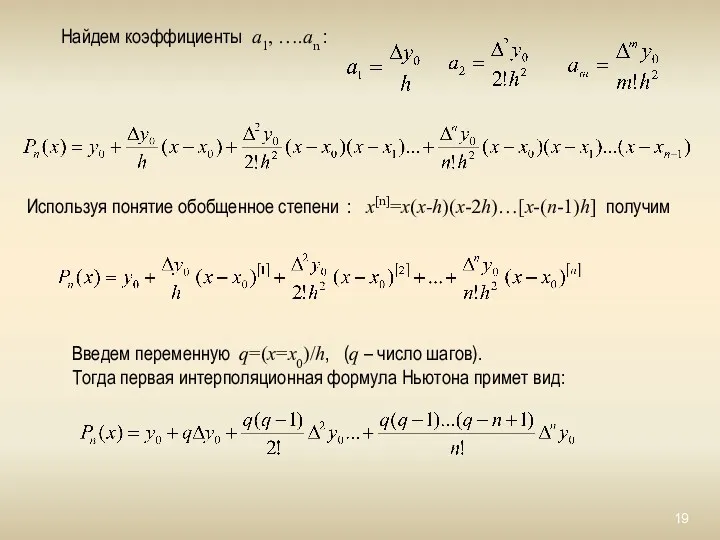
Найдем коэффициенты a1, ….an :
Введем переменную q=(x=x0)/h, (q – число
Найдем коэффициенты a1, ….an :
Введем переменную q=(x=x0)/h, (q – число
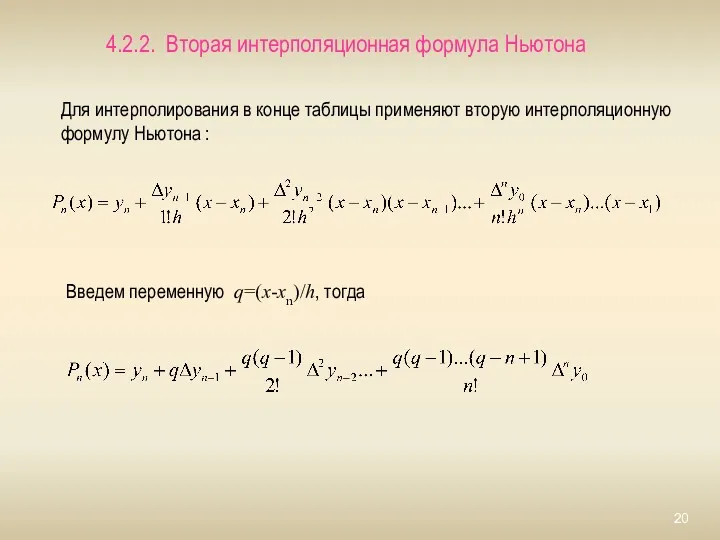
Для интерполирования в конце таблицы применяют вторую интерполяционную формулу Ньютона :
Для интерполирования в конце таблицы применяют вторую интерполяционную формулу Ньютона :
![4.3. Кубическая сплайн-интерполяция На каждом сегменте [xi-1, xi], i=1,2,…n функция](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/16724/slide-20.jpg)
4.3. Кубическая сплайн-интерполяция
На каждом сегменте [xi-1, xi], i=1,2,…n функция S(x) является
4.3. Кубическая сплайн-интерполяция
На каждом сегменте [xi-1, xi], i=1,2,…n функция S(x) является
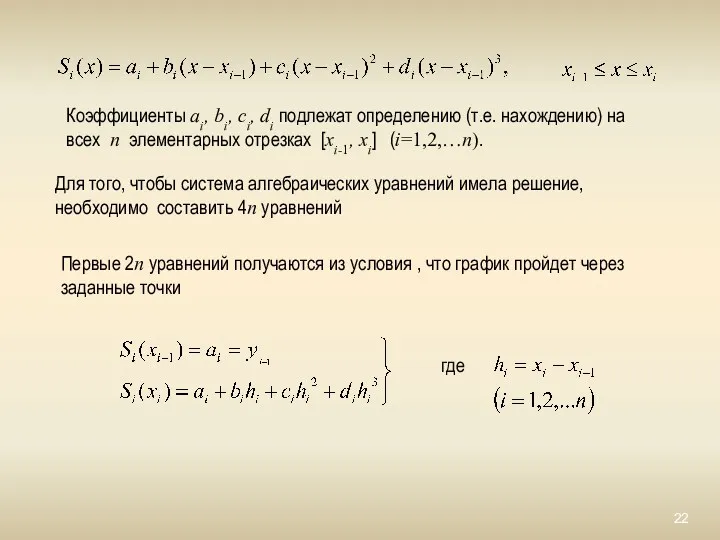
Коэффициенты ai, bi, ci, di подлежат определению (т.е. нахождению) на всех
Коэффициенты ai, bi, ci, di подлежат определению (т.е. нахождению) на всех
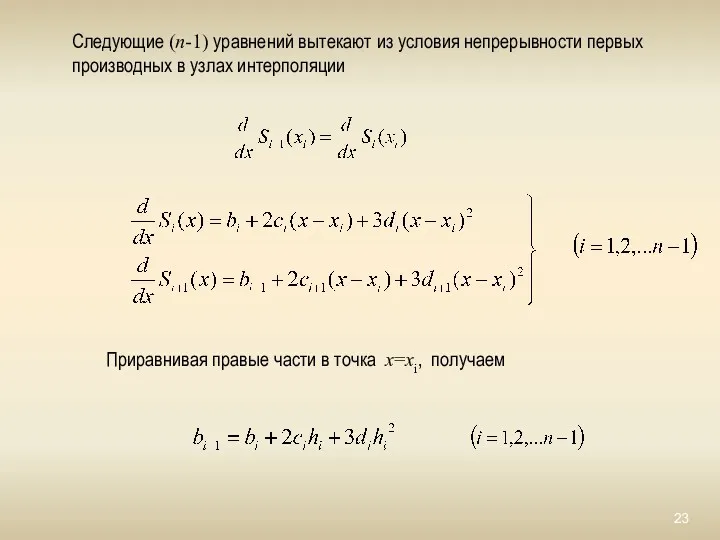
Следующие (n-1) уравнений вытекают из условия непрерывности первых производных в узлах
Следующие (n-1) уравнений вытекают из условия непрерывности первых производных в узлах
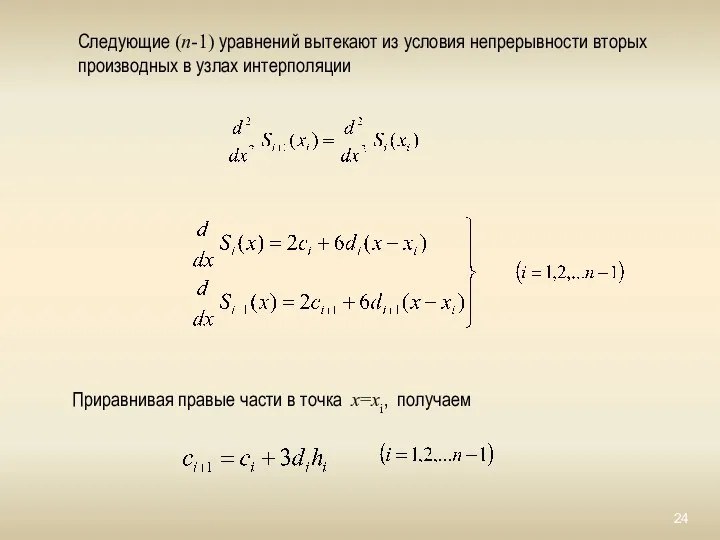
Следующие (n-1) уравнений вытекают из условия непрерывности вторых производных в узлах
Следующие (n-1) уравнений вытекают из условия непрерывности вторых производных в узлах
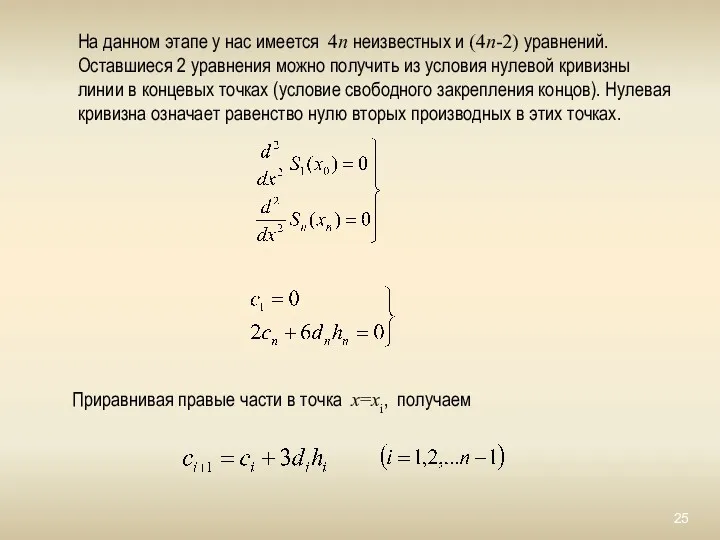
На данном этапе у нас имеется 4n неизвестных и (4n-2) уравнений.
На данном этапе у нас имеется 4n неизвестных и (4n-2) уравнений.
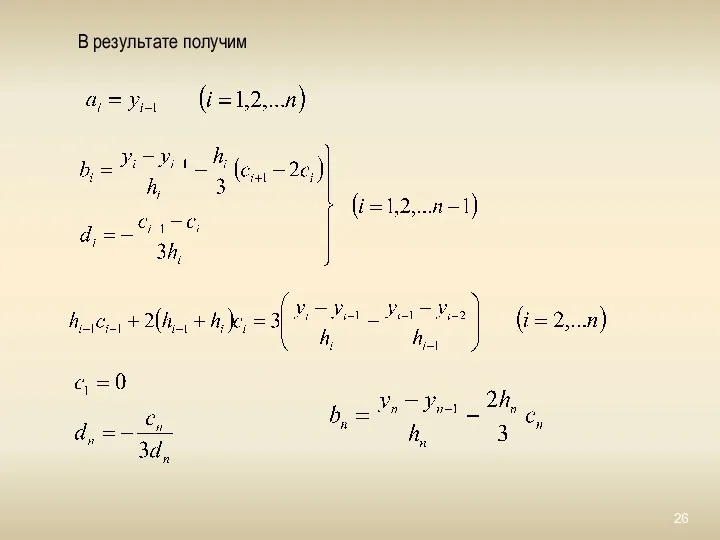
В результате получим
В результате получим
 Модуль геометрия. Подготовка к ОГЭ
Модуль геометрия. Подготовка к ОГЭ Второй и третий признаки подобия треугольников
Второй и третий признаки подобия треугольников Площади фигур. Теорема Пифагора
Площади фигур. Теорема Пифагора Екітаңбалы санды екітаңбалы санға бөлу 78:26, 88:44
Екітаңбалы санды екітаңбалы санға бөлу 78:26, 88:44 Геометрическая прогрессия
Геометрическая прогрессия Сложение и вычитание векторов
Сложение и вычитание векторов Қалпына келетін жуйелер. Интегродифференциалды сенімділік теңдігі
Қалпына келетін жуйелер. Интегродифференциалды сенімділік теңдігі Отношения и пропорции
Отношения и пропорции Координаты на прямой
Координаты на прямой Линейная алгебра и аналитическая геометрия
Линейная алгебра и аналитическая геометрия Умножение дроби на число и смешанную дробь. Натуральное
Умножение дроби на число и смешанную дробь. Натуральное Деление дробей. Урок математики в 6 классе
Деление дробей. Урок математики в 6 классе Поверхности вращения. Конические поверхности
Поверхности вращения. Конические поверхности Комплексные числа
Комплексные числа Осевая и центральная симметрия
Осевая и центральная симметрия Таблиця множення числа 4
Таблиця множення числа 4 Путешествие в страну математики
Путешествие в страну математики Цилиндр
Цилиндр Семинар для воспитателей Математическое развитие дошкольников
Семинар для воспитателей Математическое развитие дошкольников Дифференциальное исчисление функции одной переменной
Дифференциальное исчисление функции одной переменной Тест по теме: Тетраэдр и параллелепипед
Тест по теме: Тетраэдр и параллелепипед Деление на 3
Деление на 3 Нахождение нескольких долей целого.
Нахождение нескольких долей целого. Математическая викторина В гостях у мудрой совы
Математическая викторина В гостях у мудрой совы Нестандартные задачи по математике как средство развития творческих способностей учащихся
Нестандартные задачи по математике как средство развития творческих способностей учащихся Умножение и деление десятичных дробей. Контрольная работа
Умножение и деление десятичных дробей. Контрольная работа Учимся считать и решать задачи.
Учимся считать и решать задачи. Сводка и группировка статистических данных. Тема 3
Сводка и группировка статистических данных. Тема 3