- Интерполяция и аппроксимация данных

Содержание
- 2. Для анализа экспериментальных данных, которые представлены в виде таблиц и задают зависимость одних физических величин от
- 3. Полиномиальная аппроксимация Построить аппроксимирующий полином заданной степени, который приближает функцию одной переменной, заданную таблицей значений, позволяет
- 4. Метод наименьших квадратов Пусть задана таблица значений функции: Найдем коэффициенты полинома по критерию: Точка локального минимума
- 5. Допустим, имеется массив значений аргумента: х=[1 2 3 4 5 6 7 8 9 10] и
- 6. %Программа метода наименьших квадратов: x=[1 2 3 4 5 6 7 8 9 10]; y=[3 4
- 7. Исправим программу, чтобы получить правильный порядок степеней полинома n=1; for j=0:n w(j+1,:)=x.^(n-j); endfor A=w*w'; B=w*y'; p=A\B
- 8. Функция полиномиальной аппроксимации function p=poly_inter(x,y,n) % Аппроксимация методом наименьших %квадратов for j=0:n w(j+1,:)=x.^(n-j); endfor A=w*w'; B=w*y';
- 9. x=[1 2 3 4 5 6 7 8 9 10]; y=[3 4 6 6.5 7 7.5
- 11. pn=polyfit(x,y,length(x)); plot(x,y,’ko’,x,polyval(pn,x))
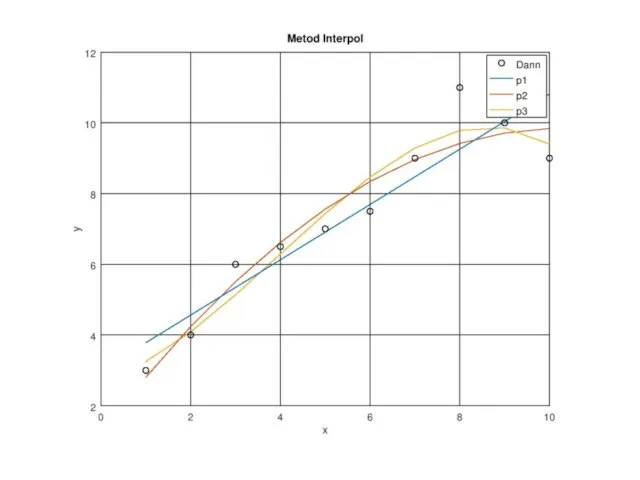
- 12. Выполнение приближения методом наименьших квадратов не всегда дает хороший результат. При увеличении степени полинома качество приближения
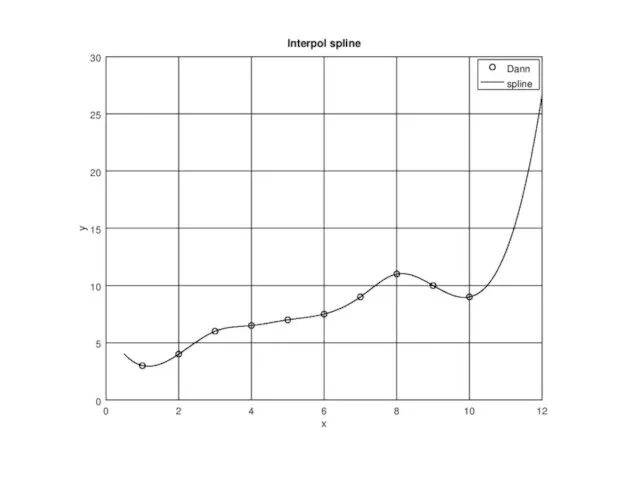
- 13. При таком способе интерполяции экспериментальные точки попарно соединяются отрезками полиномов. Обычно используют полиномы третьей степени, поэтому
- 14. x=[1 2 3 4 5 6 7 8 9 10]; y=[3 4 6 6.5 7 7.5
- 16. Для одномерной интерполяции табличных данных в MATLAB имеется функция interpl: yy=interpl(х,у,хх,method) В её четвёртом аргументе в
- 17. x=[1 2 3 4 5 6 7 8 9 10]; y=[3 4 6 6.5 7 7.5
- 19. Решение нелинейных уравнений fzero (fun, x0) fzero (fun, x0, options) [x, fval, info, output] = fzero
- 20. Если x0 - единственный скаляр, тогда ищутся соседние величины в попытке, чтобы найти отрезок, включающий нуль
- 21. output - является структурой, содержащей информацию об алгоритме fzero во время прогона. Области в структуре: iterations
- 22. optimset () options = optimset () options = optimset (par, val, …) options = optimset (old,
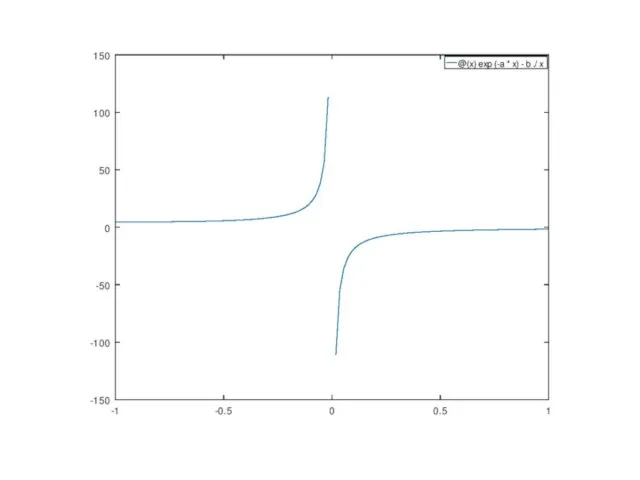
- 23. Пример нахождения корня функции с помощью fzero a=1;b=2; x0=[-1,1]; f1=@(x)exp(-a*x)-b./x; [x,y]=fzero(f1,x0) x = -3.2415e-16 y =
- 24. [x,y,info,output]=fzero(f1,x0) x = -3.2415e-16 y = 6170064136931106 info = -5 output = scalar structure containing the
- 26. fsolve (fcn, x0, options) [x, fvec, info, output, fjac] = fsolve (fcn, …) Решает систему нелинейных
- 27. Решить систему уравнений
- 29. Скачать презентацию
Для анализа экспериментальных данных, которые представлены в виде таблиц и задают
Для анализа экспериментальных данных, которые представлены в виде таблиц и задают
Полиномиальная аппроксимация
Построить аппроксимирующий полином заданной степени, который приближает функцию одной переменной,
Полиномиальная аппроксимация
Построить аппроксимирующий полином заданной степени, который приближает функцию одной переменной,
Метод наименьших квадратов
Пусть задана таблица значений функции:
Найдем коэффициенты полинома по критерию:
Точка
Метод наименьших квадратов
Пусть задана таблица значений функции:
Найдем коэффициенты полинома по критерию:
Точка
Допустим, имеется массив значений аргумента:
х=[1 2 3 4 5 6 7
Допустим, имеется массив значений аргумента:
х=[1 2 3 4 5 6 7
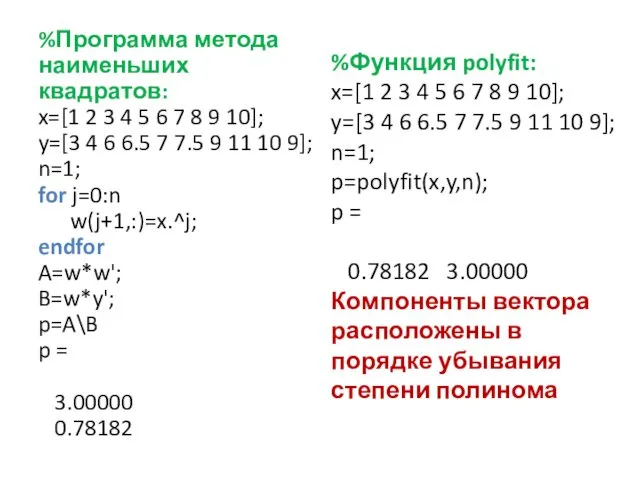
%Программа метода наименьших квадратов:
x=[1 2 3 4 5 6 7 8
%Программа метода наименьших квадратов:
x=[1 2 3 4 5 6 7 8
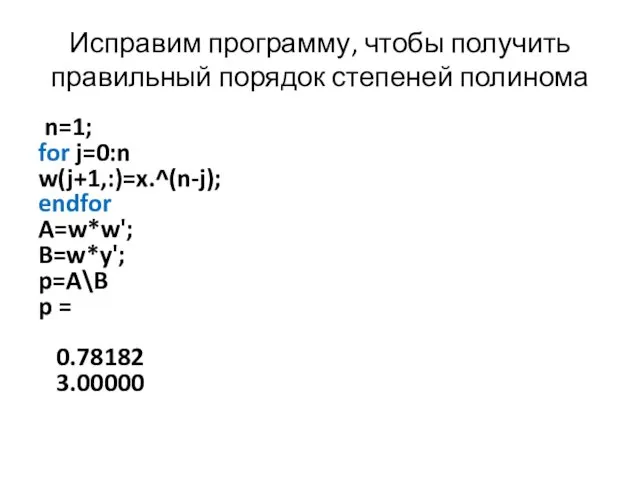
Исправим программу, чтобы получить правильный порядок степеней полинома
n=1;
for j=0:n
w(j+1,:)=x.^(n-j);
endfor
A=w*w';
B=w*y';
p=A\B
p =
Исправим программу, чтобы получить правильный порядок степеней полинома
n=1;
for j=0:n
w(j+1,:)=x.^(n-j);
endfor
A=w*w';
B=w*y';
p=A\B
p =
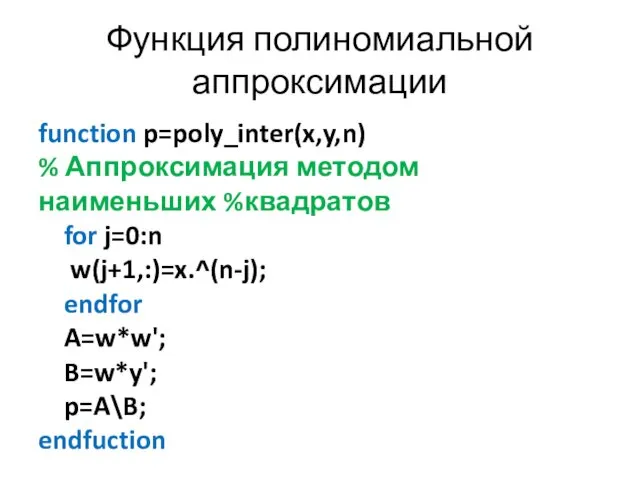
Функция полиномиальной аппроксимации
function p=poly_inter(x,y,n)
% Аппроксимация методом наименьших %квадратов
for j=0:n
w(j+1,:)=x.^(n-j);
Функция полиномиальной аппроксимации
function p=poly_inter(x,y,n)
% Аппроксимация методом наименьших %квадратов
for j=0:n
w(j+1,:)=x.^(n-j);
![x=[1 2 3 4 5 6 7 8 9 10];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-8.jpg)
x=[1 2 3 4 5 6 7 8 9 10];
y=[3 4
x=[1 2 3 4 5 6 7 8 9 10];
y=[3 4
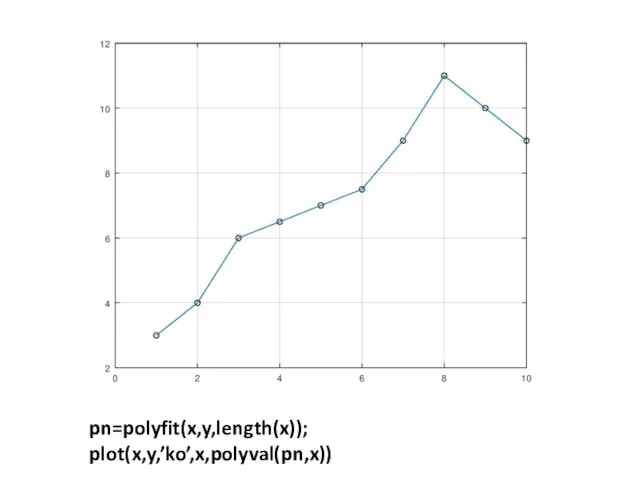
pn=polyfit(x,y,length(x)); plot(x,y,’ko’,x,polyval(pn,x))
pn=polyfit(x,y,length(x)); plot(x,y,’ko’,x,polyval(pn,x))
Выполнение приближения методом наименьших квадратов не всегда дает хороший результат. При
Выполнение приближения методом наименьших квадратов не всегда дает хороший результат. При
При таком способе интерполяции экспериментальные точки попарно соединяются отрезками полиномов. Обычно
При таком способе интерполяции экспериментальные точки попарно соединяются отрезками полиномов. Обычно
![x=[1 2 3 4 5 6 7 8 9 10];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-13.jpg)
x=[1 2 3 4 5 6 7 8 9 10];
x=[1 2 3 4 5 6 7 8 9 10];
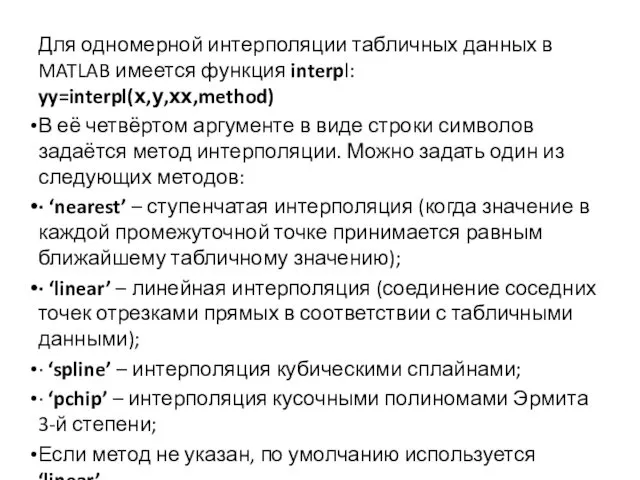
Для одномерной интерполяции табличных данных в MATLAB имеется функция interpl:
yy=interpl(х,у,хх,method)
В её
Для одномерной интерполяции табличных данных в MATLAB имеется функция interpl:
yy=interpl(х,у,хх,method)
В её
![x=[1 2 3 4 5 6 7 8 9 10];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-16.jpg)
x=[1 2 3 4 5 6 7 8 9 10];
x=[1 2 3 4 5 6 7 8 9 10];
Решение нелинейных уравнений
fzero (fun, x0)
fzero (fun, x0, options)
[x, fval, info, output]
Решение нелинейных уравнений
fzero (fun, x0)
fzero (fun, x0, options)
[x, fval, info, output]
Если x0 - единственный скаляр, тогда ищутся соседние величины в попытке,
Если x0 - единственный скаляр, тогда ищутся соседние величины в попытке,
output - является структурой, содержащей информацию об алгоритме fzero во время
output - является структурой, содержащей информацию об алгоритме fzero во время
optimset ()
options = optimset ()
options = optimset (par, val, …)
options =
optimset ()
options = optimset ()
options = optimset (par, val, …)
options =
![Пример нахождения корня функции с помощью fzero a=1;b=2; x0=[-1,1]; f1=@(x)exp(-a*x)-b./x;](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-22.jpg)
Пример нахождения корня функции с помощью fzero
a=1;b=2;
x0=[-1,1];
f1=@(x)exp(-a*x)-b./x;
[x,y]=fzero(f1,x0)
x = -3.2415e-16
y = 6170064136931106
Пример нахождения корня функции с помощью fzero
a=1;b=2;
x0=[-1,1];
f1=@(x)exp(-a*x)-b./x;
[x,y]=fzero(f1,x0)
x = -3.2415e-16
y = 6170064136931106
![[x,y,info,output]=fzero(f1,x0) x = -3.2415e-16 y = 6170064136931106 info = -5](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-23.jpg)
[x,y,info,output]=fzero(f1,x0)
x = -3.2415e-16
y = 6170064136931106
info = -5
output =
scalar structure containing the
[x,y,info,output]=fzero(f1,x0)
x = -3.2415e-16
y = 6170064136931106
info = -5
output =
scalar structure containing the
![fsolve (fcn, x0, options) [x, fvec, info, output, fjac] =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/111204/slide-25.jpg)
fsolve (fcn, x0, options)
[x, fvec, info, output, fjac] = fsolve (fcn,
fsolve (fcn, x0, options)
[x, fvec, info, output, fjac] = fsolve (fcn,
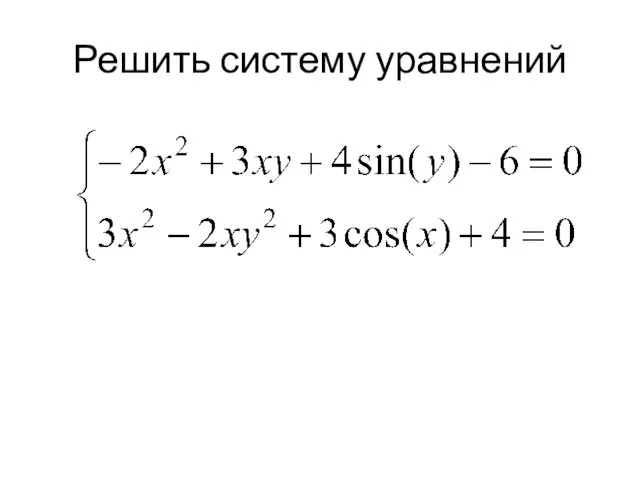
Решить систему уравнений
Решить систему уравнений
 Вписанная и описанная окружности
Вписанная и описанная окружности Нахождение дроби от числа
Нахождение дроби от числа Задачи на построение. Геометрия. 7 класс
Задачи на построение. Геометрия. 7 класс Знакомство с задачами
Знакомство с задачами Решение уравнений. 2 класс. УМК Гармония
Решение уравнений. 2 класс. УМК Гармония Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле
Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле Знакомим дошкольников с часами
Знакомим дошкольников с часами Развёртка прямоугольного параллелепипеда. Урок 143
Развёртка прямоугольного параллелепипеда. Урок 143 Кубизм в архитектуре. Оригами
Кубизм в архитектуре. Оригами Фалес Милетский. Нахождение расстояния до недоступного предмета
Фалес Милетский. Нахождение расстояния до недоступного предмета Сложение чисел с разными знаками» (проверочная работа)
Сложение чисел с разными знаками» (проверочная работа) Площадь криволинейной трапеции и интеграл
Площадь криволинейной трапеции и интеграл Решение систем, содержащих уравнения второй степени
Решение систем, содержащих уравнения второй степени Осевая и центральная симметрия 8 класс
Осевая и центральная симметрия 8 класс Умножение и деление обыкновенных дробей
Умножение и деление обыкновенных дробей Своя игра. 5 класс
Своя игра. 5 класс Луч и угол
Луч и угол Презентация Занимательная геометрия
Презентация Занимательная геометрия Презентация Веселая математика с Винни-Пухом
Презентация Веселая математика с Винни-Пухом Прямоугольный параллелепипед
Прямоугольный параллелепипед Измерение углов. Транспортир. 5 класс
Измерение углов. Транспортир. 5 класс Математика вокруг нас: форма, размер, цвет
Математика вокруг нас: форма, размер, цвет Конспект урока по математике Составные задачи 1 класс. (Программа Петерсон Л.Г.)
Конспект урока по математике Составные задачи 1 класс. (Программа Петерсон Л.Г.) Презентация по математике на тему Какие бывают алгоритмы
Презентация по математике на тему Какие бывают алгоритмы Дидактическая игра Круги и квадраты (презентация)
Дидактическая игра Круги и квадраты (презентация) Подготовка к ВПР. Математика 3 задание. Арифметический метод
Подготовка к ВПР. Математика 3 задание. Арифметический метод Заниматика №3
Заниматика №3 Способы решения логических задач
Способы решения логических задач