- Компьютерная технология. Наблюдение

Содержание
- 2. Некоторые базовые структуры систем управления
- 3. Наблюдатель состояния полного порядка Пусть стационарный объект описывается традиционной системой уравнений при Пусть матрицы A, B,
- 4. Введем ошибку оценки\восстановления Вычитая (3) из уравнения (1), получим Очевидно, для того чтобы ошибка восстановления стремилась
- 5. Наблюдатель нагрузки электромеханической системы (пример) Рассматривается электромеханическая система с электродвигателем постоянного тока с независимым возбуждением. Ставится
- 6. Введем в рассмотрение расширенный вектор состояния объекта наблюдения Положим Тогда Пусть
- 7. Уравнения всей динамической системы в пространстве состояний Матричную передаточную функцию динамической системы (5) можно представить в
- 8. Из модели (2) следует, что подсистема "объект" по сигналу является статической и ее поведение описывается в
- 9. Исходя из условий требуемой динамики, можно определить элементы матрицы коэффициентов наблюдателя где - суть коэффициенты характеристического
- 10. При непосредственном измерении угловой скорости матрица С имеет вид В этом случае математическая модель наблюдателя (3)
- 11. статья «Астатические наблюдатели нагрузки электромеханической системы», ж. Электричество, 2004. № 2. С. 25. статья «Синтез наблюдателя
- 12. Андреев Ю.Н. Управление линейными конечномерными объектами. // М.: Наука. Физматлит. 1976. Коровин С.К., Фомичев В.В. Наблюдатели
- 16. Скачать презентацию
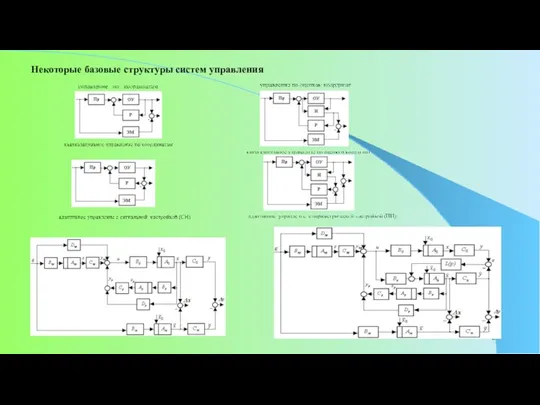
Некоторые базовые структуры систем управления
Некоторые базовые структуры систем управления
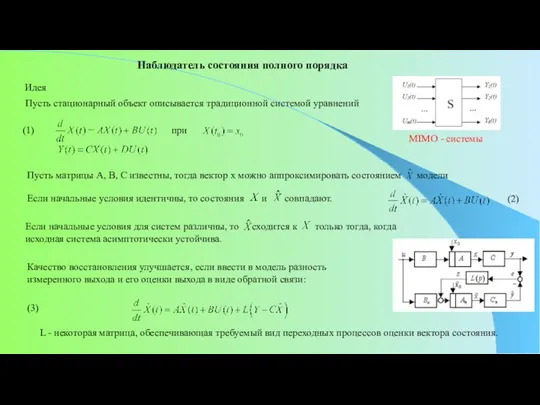
Наблюдатель состояния полного порядка
Пусть стационарный объект описывается традиционной системой уравнений
при
Пусть матрицы
Наблюдатель состояния полного порядка
Пусть стационарный объект описывается традиционной системой уравнений
при
Пусть матрицы
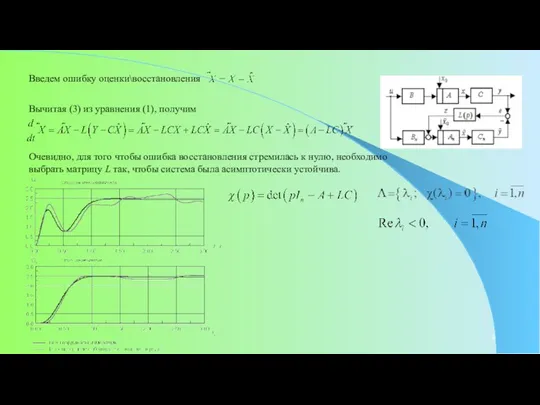
Введем ошибку оценки\восстановления
Вычитая (3) из уравнения (1), получим
Очевидно, для того чтобы
Введем ошибку оценки\восстановления
Вычитая (3) из уравнения (1), получим
Очевидно, для того чтобы
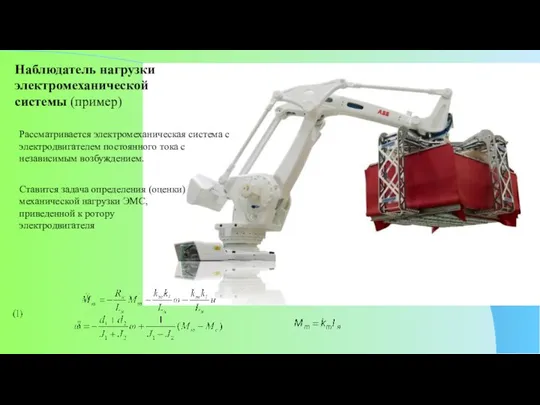
Наблюдатель нагрузки электромеханической системы (пример)
Рассматривается электромеханическая система с электродвигателем постоянного тока
Наблюдатель нагрузки электромеханической системы (пример)
Рассматривается электромеханическая система с электродвигателем постоянного тока
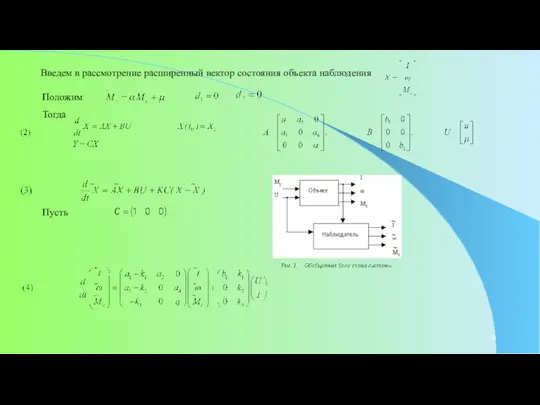
Введем в рассмотрение расширенный вектор состояния объекта наблюдения
Положим
Тогда
Пусть
Введем в рассмотрение расширенный вектор состояния объекта наблюдения
Положим
Тогда
Пусть
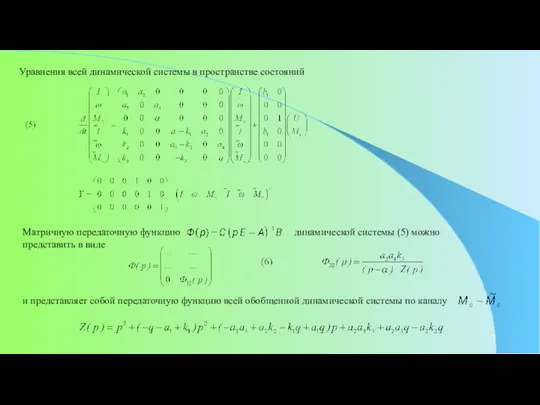
Уравнения всей динамической системы в пространстве состояний
Матричную передаточную функцию динамической
Уравнения всей динамической системы в пространстве состояний
Матричную передаточную функцию динамической
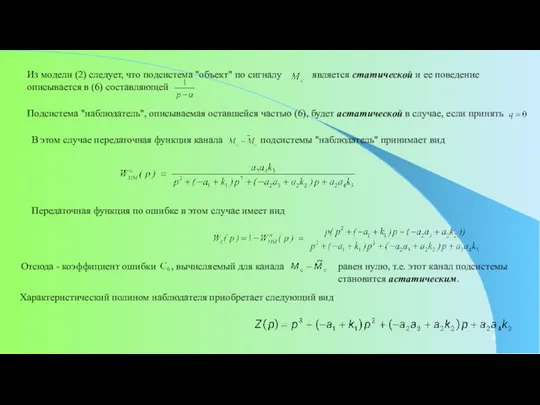
Из модели (2) следует, что подсистема "объект" по сигналу является статической
Из модели (2) следует, что подсистема "объект" по сигналу является статической
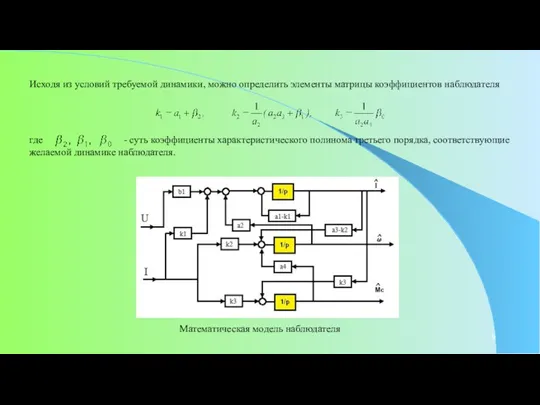
Исходя из условий требуемой динамики, можно определить элементы матрицы коэффициентов наблюдателя
где
Исходя из условий требуемой динамики, можно определить элементы матрицы коэффициентов наблюдателя
где
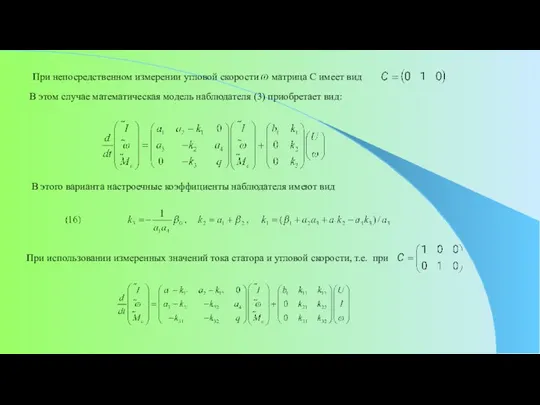
При непосредственном измерении угловой скорости матрица С имеет вид
В этом
При непосредственном измерении угловой скорости матрица С имеет вид
В этом
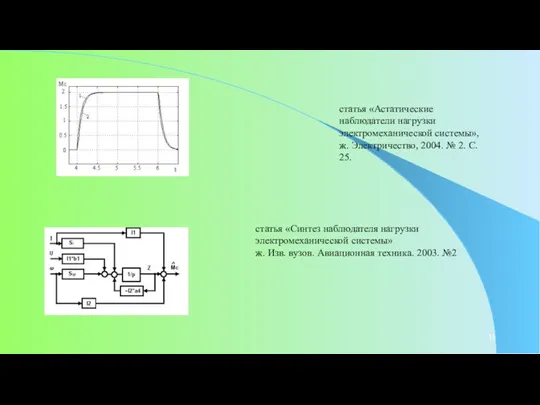
статья «Астатические наблюдатели нагрузки электромеханической системы»,
ж. Электричество, 2004. № 2. С.
статья «Астатические наблюдатели нагрузки электромеханической системы»,
ж. Электричество, 2004. № 2. С.
Андреев Ю.Н. Управление линейными конечномерными объектами. // М.: Наука. Физматлит. 1976.
Коровин С.К.,
Андреев Ю.Н. Управление линейными конечномерными объектами. // М.: Наука. Физматлит. 1976.
Коровин С.К.,


 Ребусы. Рисунки
Ребусы. Рисунки Среднее арифметическое чисел
Среднее арифметическое чисел Презентация по математике
Презентация по математике Определитель матрицы
Определитель матрицы Синус суммы и разности двух углов
Синус суммы и разности двух углов Непрерывная случайная величина
Непрерывная случайная величина Площадь. Свойства площади. Формула площади прямоугольника
Площадь. Свойства площади. Формула площади прямоугольника Письменное умножение трехзначного числа на однозначное
Письменное умножение трехзначного числа на однозначное Столбчатые диаграммы и графики
Столбчатые диаграммы и графики 100 логических задач. 2 класс
100 логических задач. 2 класс Теория вероятностей. ЕГЭ (задание №4.)
Теория вероятностей. ЕГЭ (задание №4.) Математика пәнінен арнайы мектептерге арналған тақырыптық жоспар. Қосу және азайту
Математика пәнінен арнайы мектептерге арналған тақырыптық жоспар. Қосу және азайту Задача. Найти допускаемую нагрузку
Задача. Найти допускаемую нагрузку Площадь фигур
Площадь фигур 20230917_arifmetich_progressiya
20230917_arifmetich_progressiya Единицы длины. Миллиметр. 2 класс
Единицы длины. Миллиметр. 2 класс Решение задач на применение аксиом стереометрии и их следствий
Решение задач на применение аксиом стереометрии и их следствий Подобие в геометрии. Подобные треугольники
Подобие в геометрии. Подобные треугольники Множество. Элементы множества
Множество. Элементы множества Вступ до математичного аналізу. Поняття функції однієї змінної. Методи побудови графіків функцій без використання похідної
Вступ до математичного аналізу. Поняття функції однієї змінної. Методи побудови графіків функцій без використання похідної Геометрии Евклида как первая научная система
Геометрии Евклида как первая научная система Наглядная геометрия
Наглядная геометрия Тренажёр. Сравнение
Тренажёр. Сравнение Презентация по математике 1 класс Сложение и вычитание с нулем
Презентация по математике 1 класс Сложение и вычитание с нулем Разложение многочлена на множители
Разложение многочлена на множители Целые и рациональные числа. Действительные числа
Целые и рациональные числа. Действительные числа Количественное описание математических объектов
Количественное описание математических объектов Табличные случаи сложения и вычитания в пределах 10 Презентация к уроку математики 1 класс
Табличные случаи сложения и вычитания в пределах 10 Презентация к уроку математики 1 класс