- Метод искусственного базиса

Содержание
- 2. Вспомогательная задача к ЗЛП (1): (2) Вектор составлен из естественных переменных ЗЛП (1.) и искусственных переменных,
- 3. Искусственные переменные не несут никакого экономического смысла. Они необходимы только для поиска начального БДП. Единичные векторы
- 4. Теорема. (О существовании плана ЗЛП). Пусть оптимальный план ЗЛП (2), тогда: Если , то план является
- 5. П р и м е р: Рассмотрим ЗЛП: Приведем данную ЗЛП к каноническому виду:
- 6. Единичного базиса нет, поэтому построим вспомогательную задачу, предварительно введя две искусственные переменные х5 ≥ 0 и
- 8. Решив данную вспомогательную задачу симплекс-методом, мы найдем ее оптимальный план и значение целевой функции на этом
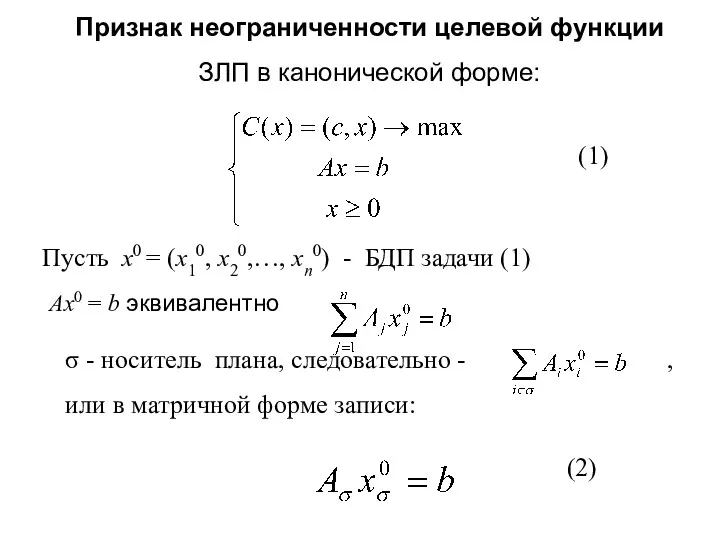
- 9. Признак неограниченности целевой функции ЗЛП в канонической форме: Пусть х0 = (х10, х20,…, хn0) - БДП
- 10. В уравнении (2) хσ0 представляет часть исходного вектора х0 , из которого удалены нулевые (свободные) компоненты.
- 11. Теорема. О неразрешимости ЗЛП. Если для некоторого БДП х0 существует Δk
- 12. Пример: Единичный базис состоит из векторов А3, А4, А5. Вырожденный БДП х0 = (0; 0; 1;
- 13. Решение ЗЛП
- 15. Скачать презентацию
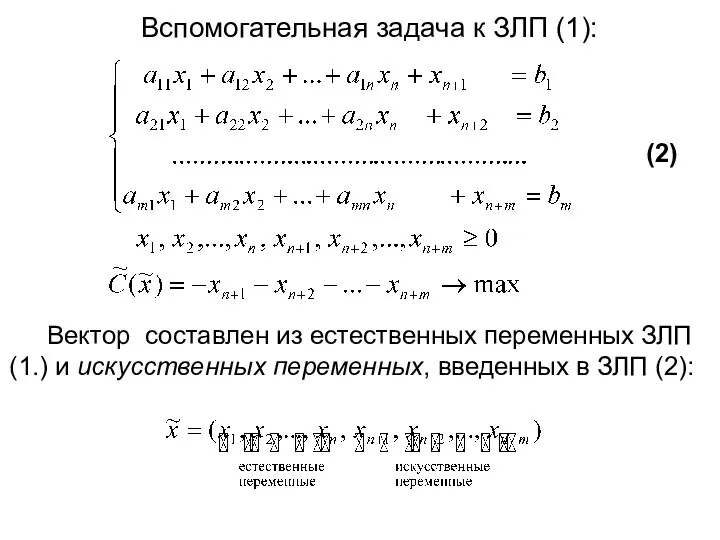
Вспомогательная задача к ЗЛП (1):
(2)
Вектор составлен из естественных переменных ЗЛП
Вспомогательная задача к ЗЛП (1):
(2)
Вектор составлен из естественных переменных ЗЛП
Искусственные переменные не несут никакого экономического смысла. Они необходимы только для
Искусственные переменные не несут никакого экономического смысла. Они необходимы только для
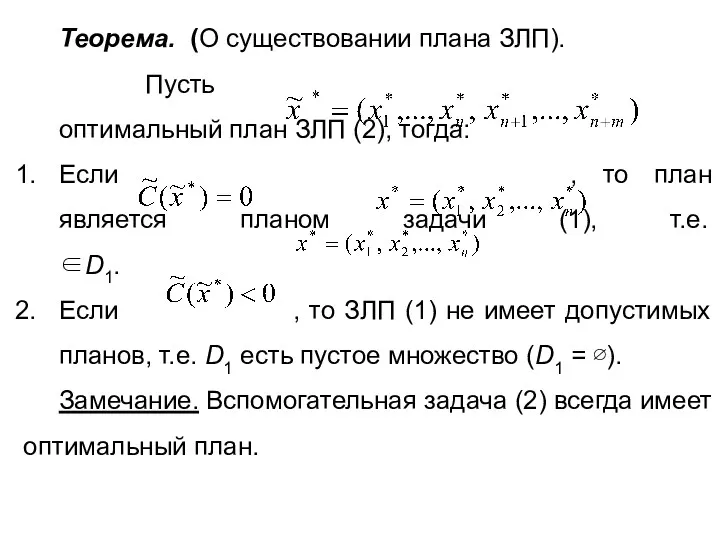
Теорема. (О существовании плана ЗЛП).
Пусть
оптимальный план ЗЛП (2), тогда:
Если
Теорема. (О существовании плана ЗЛП).
Пусть
оптимальный план ЗЛП (2), тогда:
Если
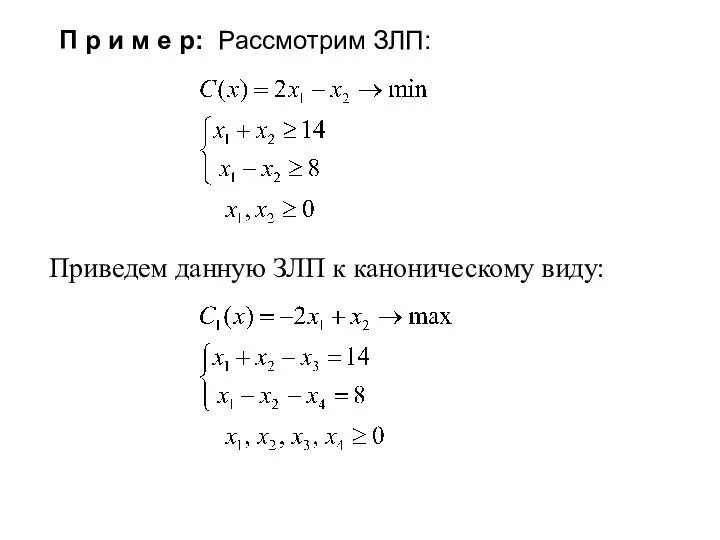
П р и м е р: Рассмотрим ЗЛП:
Приведем данную ЗЛП к
П р и м е р: Рассмотрим ЗЛП:
Приведем данную ЗЛП к
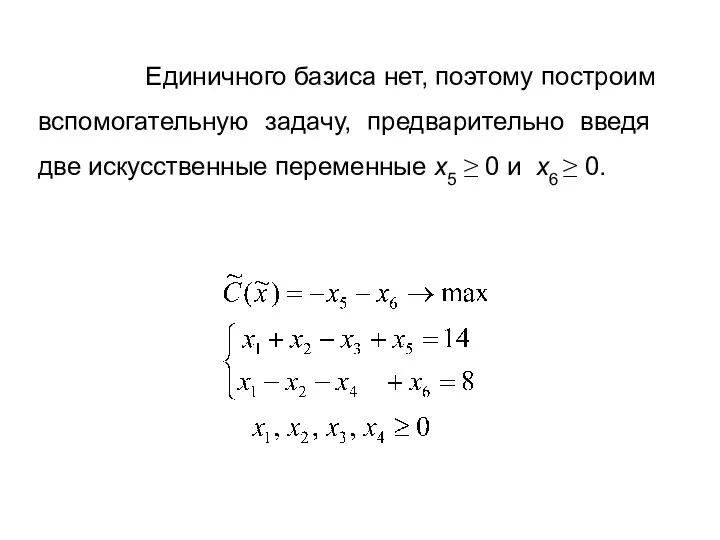
Единичного базиса нет, поэтому построим вспомогательную задачу, предварительно введя две
Единичного базиса нет, поэтому построим вспомогательную задачу, предварительно введя две
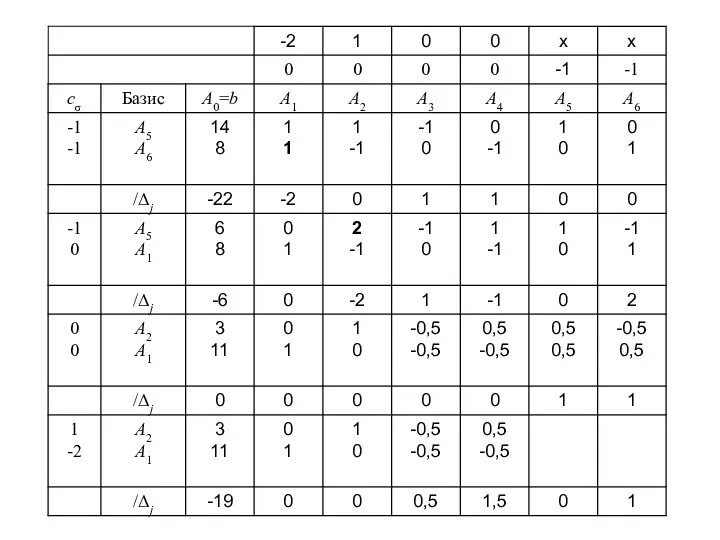
Решив данную вспомогательную задачу симплекс-методом, мы найдем ее оптимальный план и
Решив данную вспомогательную задачу симплекс-методом, мы найдем ее оптимальный план и
Признак неограниченности целевой функции
ЗЛП в канонической форме:
Пусть х0 = (х10,
Признак неограниченности целевой функции
ЗЛП в канонической форме:
Пусть х0 = (х10,
В уравнении (2) хσ0 представляет часть исходного вектора х0 ,
В уравнении (2) хσ0 представляет часть исходного вектора х0 ,
Теорема. О неразрешимости ЗЛП.
Если для некоторого БДП х0 существует Δk <
Теорема. О неразрешимости ЗЛП.
Если для некоторого БДП х0 существует Δk <
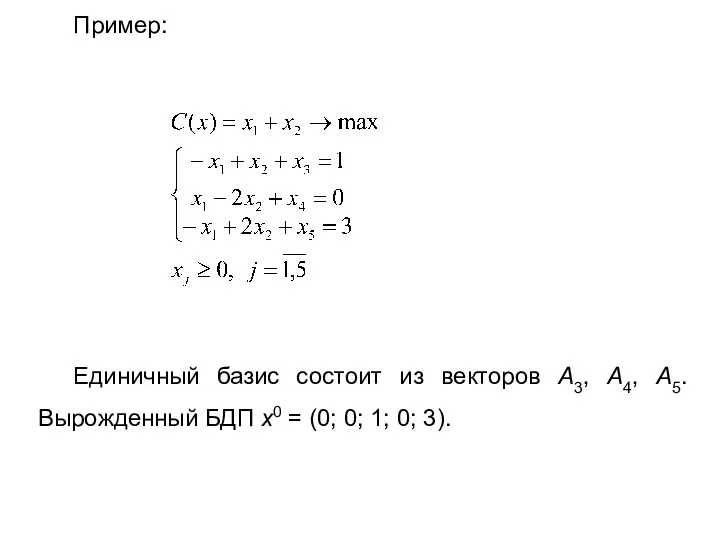
Пример:
Единичный базис состоит из векторов А3, А4, А5. Вырожденный БДП х0
Пример:
Единичный базис состоит из векторов А3, А4, А5. Вырожденный БДП х0
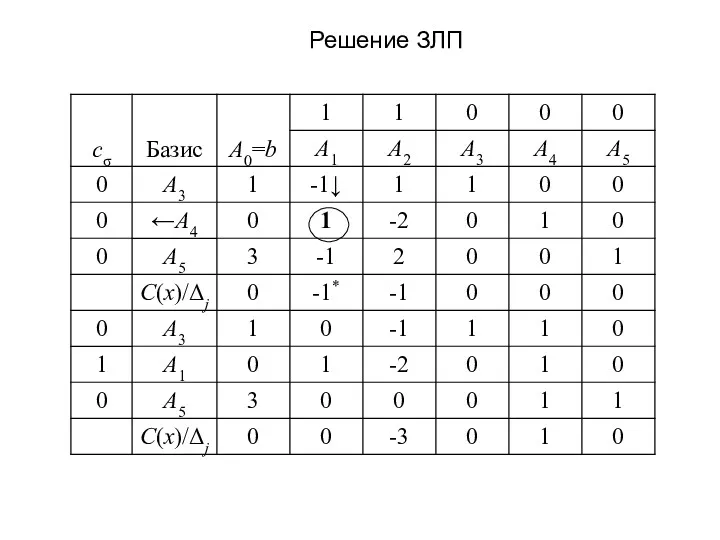
Решение ЗЛП
Решение ЗЛП
 Системы двух уравнений с двумя неизвестными
Системы двух уравнений с двумя неизвестными Функция. Область определения и область значений функции
Функция. Область определения и область значений функции Контрольная работа: Системы линейных уравнений с двумя неизвестными
Контрольная работа: Системы линейных уравнений с двумя неизвестными Задачи на движение. Математика. 5 класс
Задачи на движение. Математика. 5 класс Свойства равнобедренного треугольника. Решение задач
Свойства равнобедренного треугольника. Решение задач Парадокс Гиффена
Парадокс Гиффена Метрология и теория измерений. Метрологические характеристики средств измерений. (Лекция 7)
Метрология и теория измерений. Метрологические характеристики средств измерений. (Лекция 7) Итоговый тест по математике. 1 класс
Итоговый тест по математике. 1 класс Презентация к конспекту урока по математике Письменные приемы сложения и вычитания двузначных чисел с переходом через десяток.
Презентация к конспекту урока по математике Письменные приемы сложения и вычитания двузначных чисел с переходом через десяток. Приближенные вычисления (8 класс)
Приближенные вычисления (8 класс) Урок математики в 3 классе Свойства пересечения множеств
Урок математики в 3 классе Свойства пересечения множеств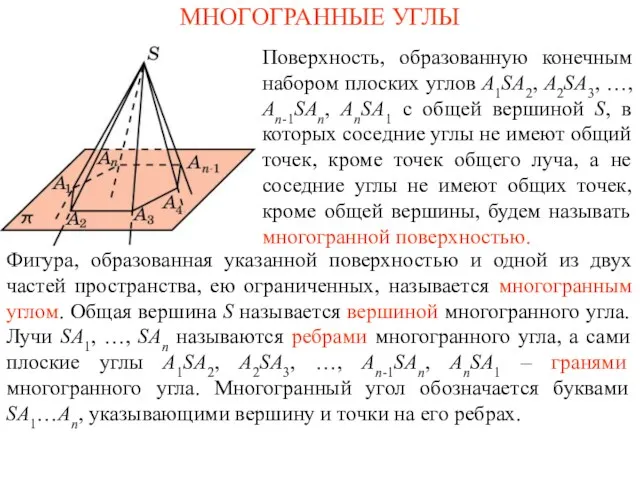 Многогранные углы
Многогранные углы Транспортная задача
Транспортная задача Анализ геометрической формы предмета
Анализ геометрической формы предмета Применение производных частных. Касательная плоскость и нормаль к поверхности
Применение производных частных. Касательная плоскость и нормаль к поверхности Презентация по математике Положение предметов на плоскости
Презентация по математике Положение предметов на плоскости Умножение десятичных дробей. 5 класс
Умножение десятичных дробей. 5 класс Аналіз характеристик КС на основі теорії марківських процесів. (Тема 5)
Аналіз характеристик КС на основі теорії марківських процесів. (Тема 5) Абсолютная и относительная погрешность
Абсолютная и относительная погрешность Работа с задачами на математическом кружке
Работа с задачами на математическом кружке Отношение. Урок математики в 6 классе
Отношение. Урок математики в 6 классе Правильные многогранники (тела Платона)
Правильные многогранники (тела Платона) Статистикалық әдістер
Статистикалық әдістер Одночлен и его стандартный вид. 7 класс
Одночлен и его стандартный вид. 7 класс Десятичные дроби. Сложение и вычитание десятичных дробей
Десятичные дроби. Сложение и вычитание десятичных дробей Решение задач с помощью уравнений
Решение задач с помощью уравнений Интеллектуальный марафон
Интеллектуальный марафон Презентации по математике 1 класс Школа 2100
Презентации по математике 1 класс Школа 2100