- Оценка качества регулирования. Радиоавтоматика. Лекция 7

Содержание
- 2. ОЦЕНКА КАЧЕСТВА ПО ПЕРЕХОДНОЙ И ЧАСТОТНОЙ ХАРАКТЕРИСТИКАМ Значение hуст равно или немного меньше 1. Переходная характеристика
- 3. Показатель колебательности K0 близок к 1 и M ≈ Km
- 4. Область СЧ: – (20 - 30) дБ 1) Δφ = 90o = π/2 2) Δφ =
- 5. Δhm(%) = 70 – Δφ(град.) при 30о – 20 дБ/дек. – 40 или – 60 дБ/дек.
- 6. ОЦЕНКА КАЧЕСТВА ПРИ ПОЛИНОМИАЛЬНОМ ВОЗДЕЙСТВИИ xв(t) = 0 δ(t) Δ(p) =Kош(p) Xз (p). Kош(p) = S0
- 7. Для расчета ошибок нужно знать три первых коэффициента разложения: S0, S1, S2. САР называется статической, если
- 8. ОШИБКИ В СТАТИЧЕСКИХ И АСТАТИЧЕСКИХ СИСТЕМАХ 1) СТАТИЧЕСКАЯ СИСТЕМА S0 ≠ 0 → a0 ≠ 0
- 9. 2) АСТАТИЧЕСКАЯ СИСТЕМА ПЕРВОГО ПОРЯДКА S0 = 0 → a0 = 0 . Kр(p) = =
- 11. Скачать презентацию
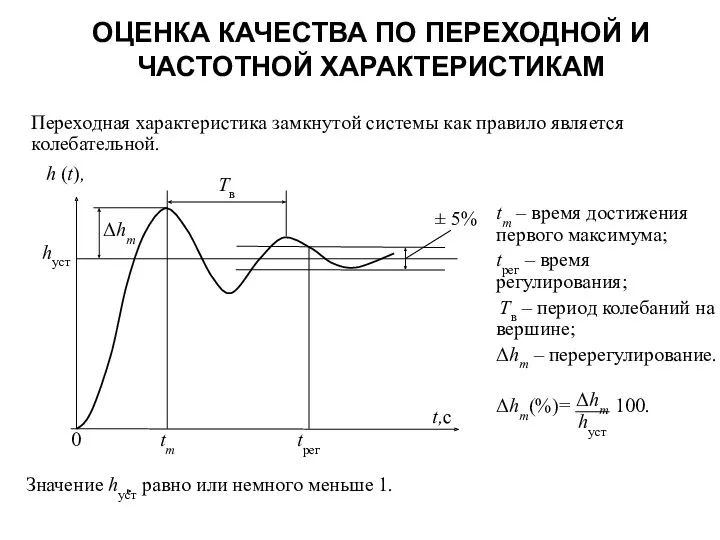
ОЦЕНКА КАЧЕСТВА ПО ПЕРЕХОДНОЙ И ЧАСТОТНОЙ ХАРАКТЕРИСТИКАМ
Значение hуст равно или немного
ОЦЕНКА КАЧЕСТВА ПО ПЕРЕХОДНОЙ И ЧАСТОТНОЙ ХАРАКТЕРИСТИКАМ
Значение hуст равно или немного
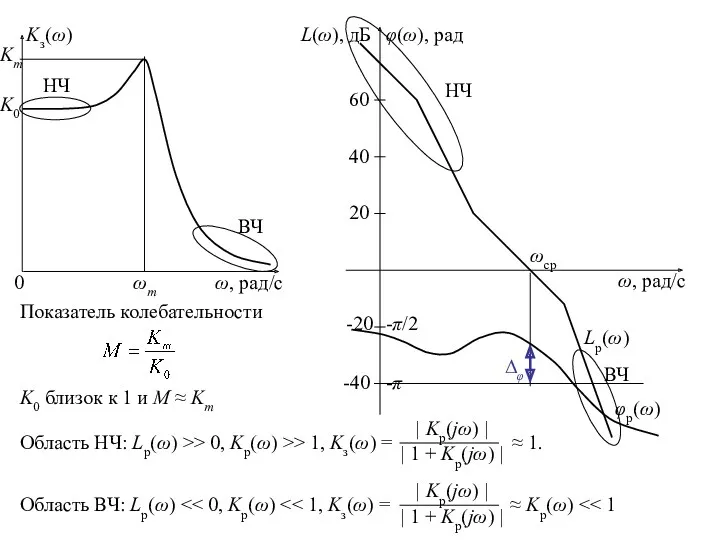
Показатель колебательности
K0 близок к 1 и M ≈ Km
Показатель колебательности
K0 близок к 1 и M ≈ Km
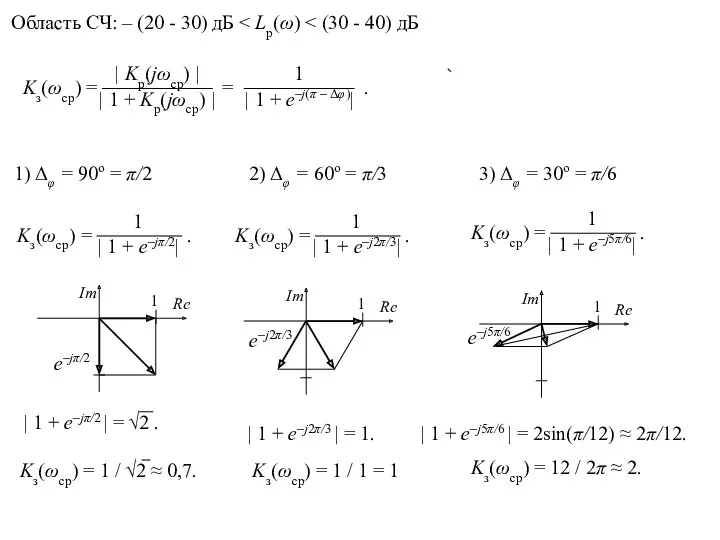
Область СЧ: – (20 - 30) дБ < Lр(ω) < (30
Область СЧ: – (20 - 30) дБ < Lр(ω) < (30
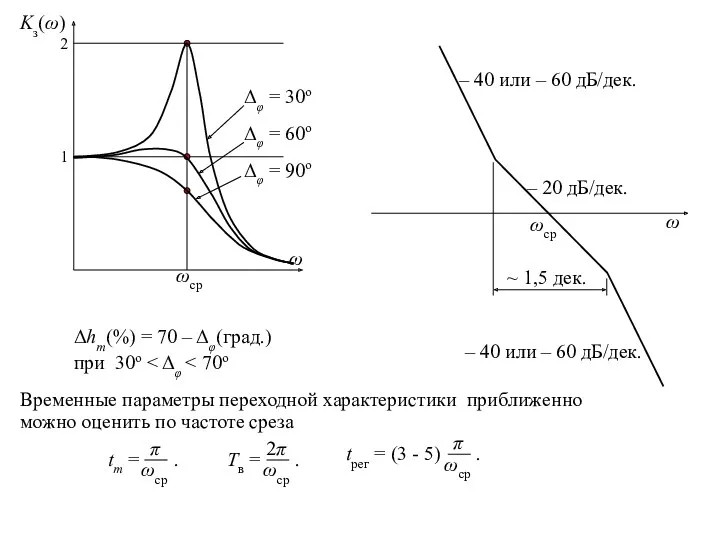
Δhm(%) = 70 – Δφ(град.) при 30о < Δφ < 70o
–
Δhm(%) = 70 – Δφ(град.) при 30о < Δφ < 70o
–
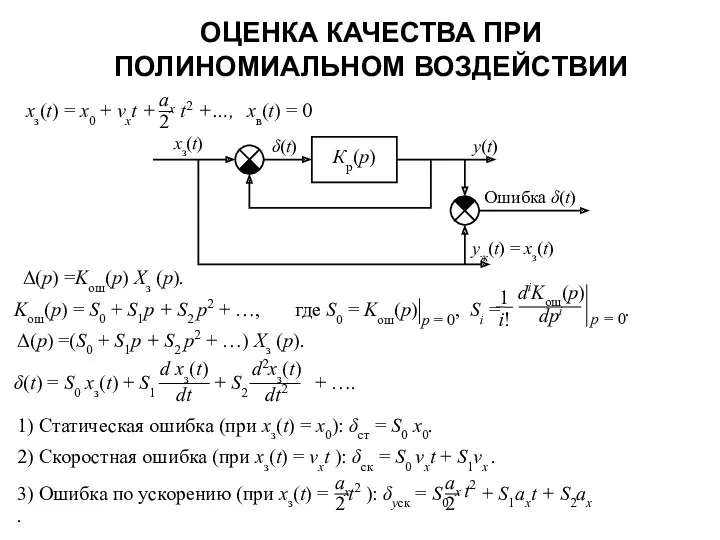
ОЦЕНКА КАЧЕСТВА ПРИ ПОЛИНОМИАЛЬНОМ ВОЗДЕЙСТВИИ
xв(t) = 0
δ(t)
Δ(p) =Kош(p) Xз (p).
Kош(p)
ОЦЕНКА КАЧЕСТВА ПРИ ПОЛИНОМИАЛЬНОМ ВОЗДЕЙСТВИИ
xв(t) = 0
δ(t)
Δ(p) =Kош(p) Xз (p).
Kош(p)
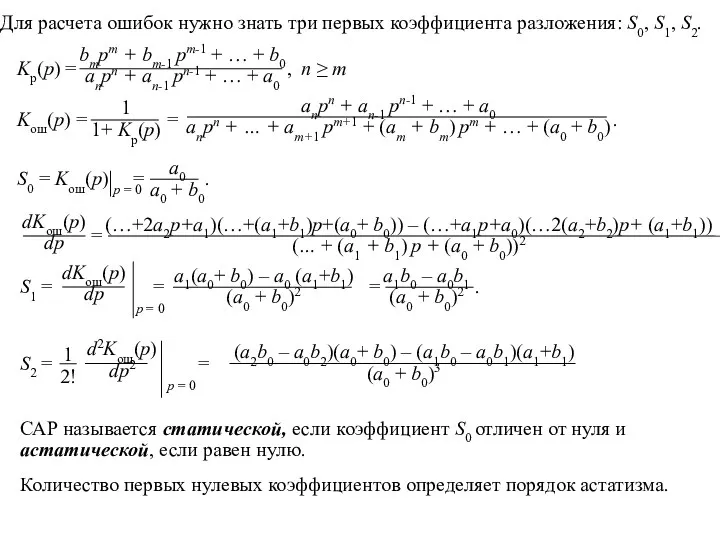
Для расчета ошибок нужно знать три первых коэффициента разложения: S0, S1,
Для расчета ошибок нужно знать три первых коэффициента разложения: S0, S1,
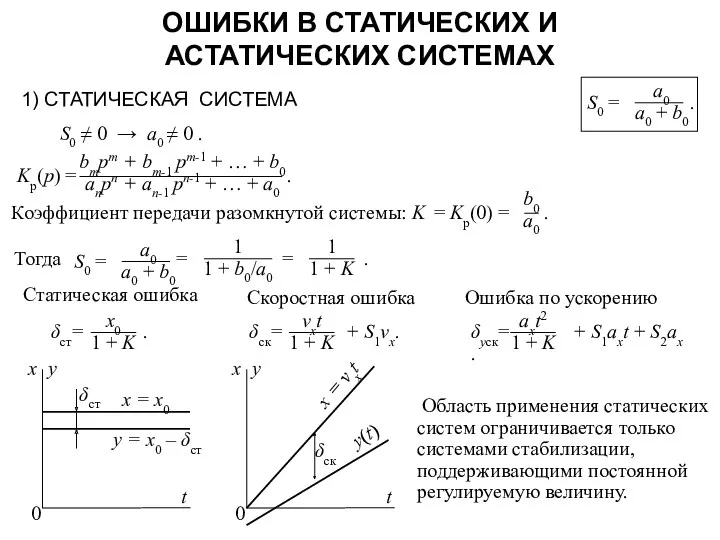
ОШИБКИ В СТАТИЧЕСКИХ И АСТАТИЧЕСКИХ СИСТЕМАХ
1) СТАТИЧЕСКАЯ СИСТЕМА
S0 ≠ 0 →
ОШИБКИ В СТАТИЧЕСКИХ И АСТАТИЧЕСКИХ СИСТЕМАХ
1) СТАТИЧЕСКАЯ СИСТЕМА
S0 ≠ 0 →
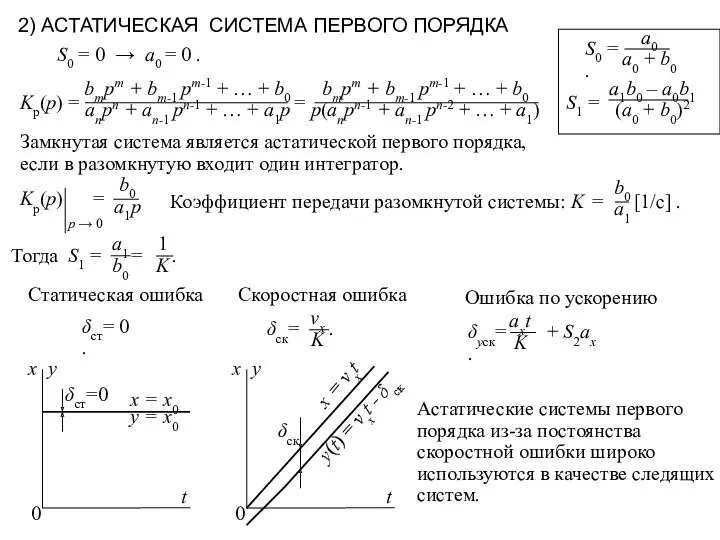
2) АСТАТИЧЕСКАЯ СИСТЕМА ПЕРВОГО ПОРЯДКА
S0 = 0 → a0 = 0
2) АСТАТИЧЕСКАЯ СИСТЕМА ПЕРВОГО ПОРЯДКА
S0 = 0 → a0 = 0
 Куля і сфера
Куля і сфера Прямоугольная система координат. Координаты вектора
Прямоугольная система координат. Координаты вектора Ученые-математики в годы войны
Ученые-математики в годы войны Цветные вопросы. Дидактическая игра
Цветные вопросы. Дидактическая игра Математика. 1 класс. Урок 94. Табличное сложение и вычитание - Презентация
Математика. 1 класс. Урок 94. Табличное сложение и вычитание - Презентация Случайные величины
Случайные величины Методы решения тригонометрических уравнений
Методы решения тригонометрических уравнений урок математики 4 класс Решение задач на противоположное движение
урок математики 4 класс Решение задач на противоположное движение Единицы стоимости: рубль, копейка.
Единицы стоимости: рубль, копейка. Применение производной и первообразной показательной и логарифмической функции
Применение производной и первообразной показательной и логарифмической функции Урок математики во 2 классе Табличное умножение и деление
Урок математики во 2 классе Табличное умножение и деление Правильные многогранники
Правильные многогранники Линейные неравенства с одним неизвестным. 9 класс
Линейные неравенства с одним неизвестным. 9 класс Кызыклы математика
Кызыклы математика Умножение натуральных чисел и его свойства. 5 класс
Умножение натуральных чисел и его свойства. 5 класс Сфера. Геометрия. 11 класс
Сфера. Геометрия. 11 класс Взаимное расположение прямой и окружности
Взаимное расположение прямой и окружности Числовые и буквенные выражения
Числовые и буквенные выражения Презентация. Пути формирования (развития) универсальных учебных действий учащихся 1 класса в урочной деятельности по предмету Математика
Презентация. Пути формирования (развития) универсальных учебных действий учащихся 1 класса в урочной деятельности по предмету Математика Повторение. Решение задач и примеров
Повторение. Решение задач и примеров Задачки от смешариков. Интерактивные игры для детей старшего дошкольного возраста
Задачки от смешариков. Интерактивные игры для детей старшего дошкольного возраста Уравнения и неравенства. Равносильность уравнений
Уравнения и неравенства. Равносильность уравнений Графический способ решения систем уравнений. 9 класс
Графический способ решения систем уравнений. 9 класс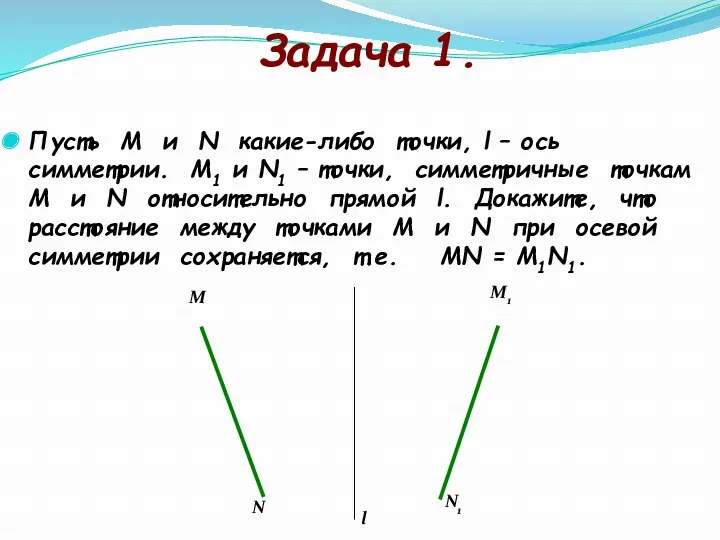 Осевая симметрия. Задачи. 9 класс. Геометрия
Осевая симметрия. Задачи. 9 класс. Геометрия урок-презентация 1класс
урок-презентация 1класс ВПМ. Математичне програмування та дослідження операцій. Оптимізаційні задачі управління запасами. (Лекція 5)
ВПМ. Математичне програмування та дослідження операцій. Оптимізаційні задачі управління запасами. (Лекція 5)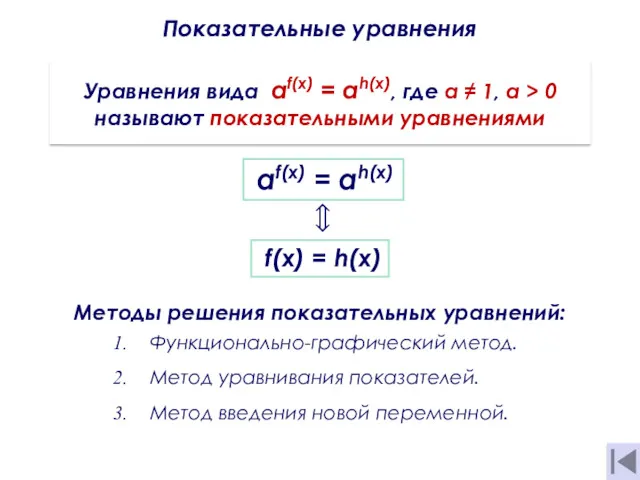 Показательные уравнения и неравенства
Показательные уравнения и неравенства Компетентностно-ориентированные задания. Пропорции
Компетентностно-ориентированные задания. Пропорции