- Оценка точности при параметрическом способе уравнивания

Содержание
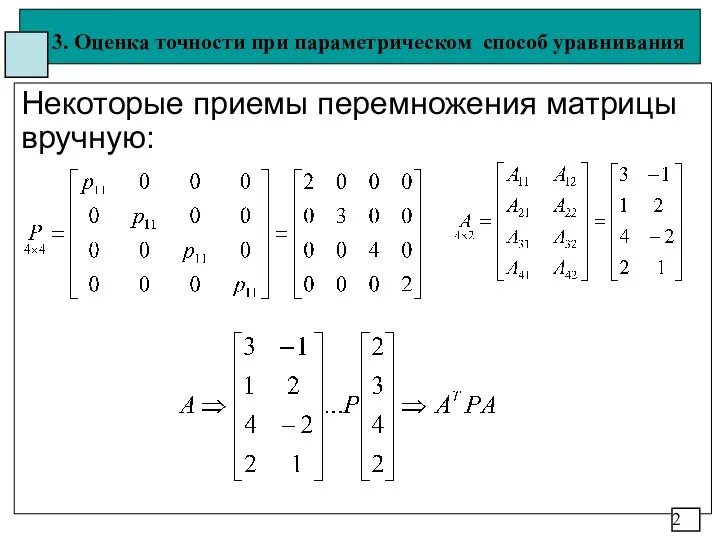
- 2. 3. Оценка точности при параметрическом способ уравнивания Некоторые приемы перемножения матрицы вручную: 2
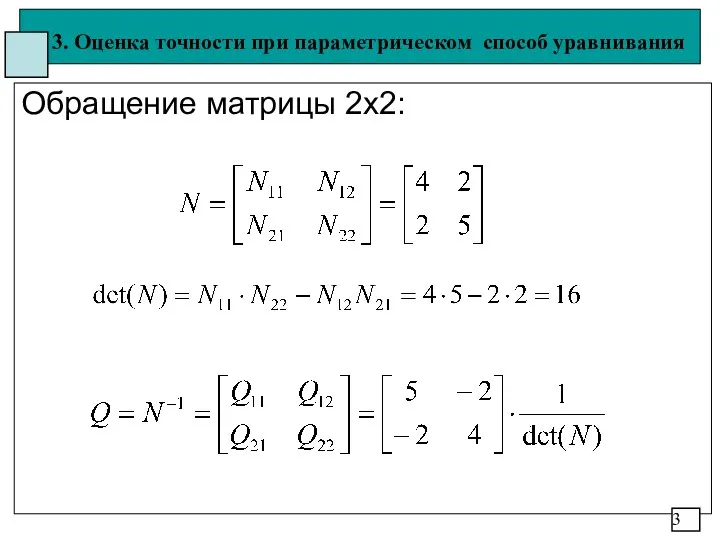
- 3. 3. Оценка точности при параметрическом способ уравнивания Обращение матрицы 2х2: 3
- 4. 3. Оценка точности при параметрическом способ уравнивания Оценивание уравнивание оценка точности (количество) (качество) Оценка точности ⇒
- 5. 3. Оценка точности при параметрическом способ уравнивания Контроль качества в терминах точности - локальные, глобальные оценки
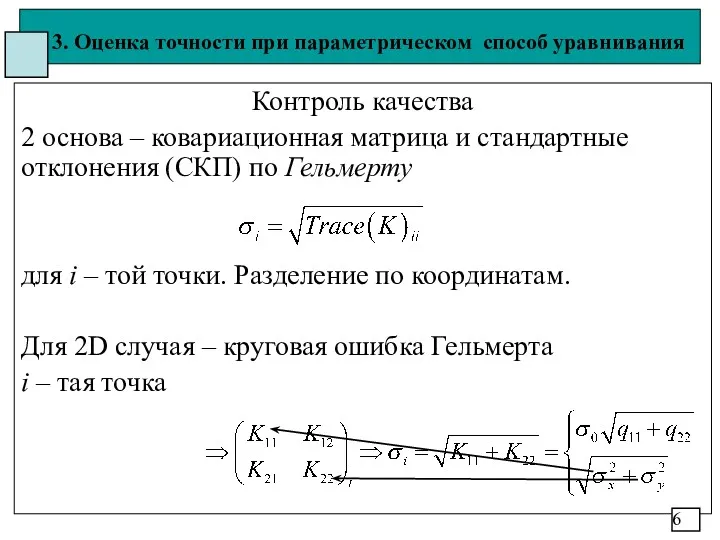
- 6. 3. Оценка точности при параметрическом способ уравнивания Контроль качества 2 основа – ковариационная матрица и стандартные
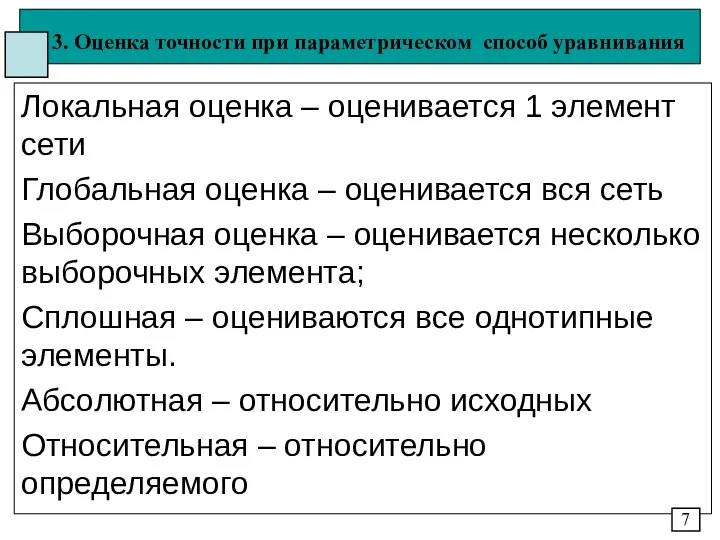
- 7. 3. Оценка точности при параметрическом способ уравнивания Локальная оценка – оценивается 1 элемент сети Глобальная оценка
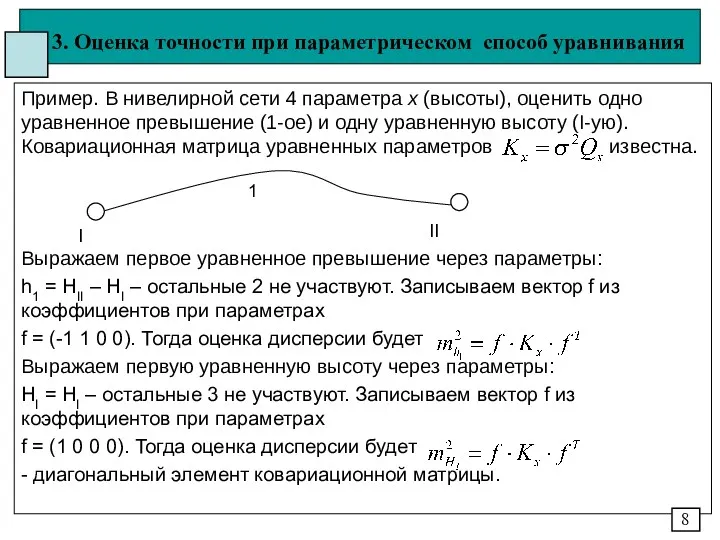
- 8. 3. Оценка точности при параметрическом способ уравнивания Пример. В нивелирной сети 4 параметра х (высоты), оценить
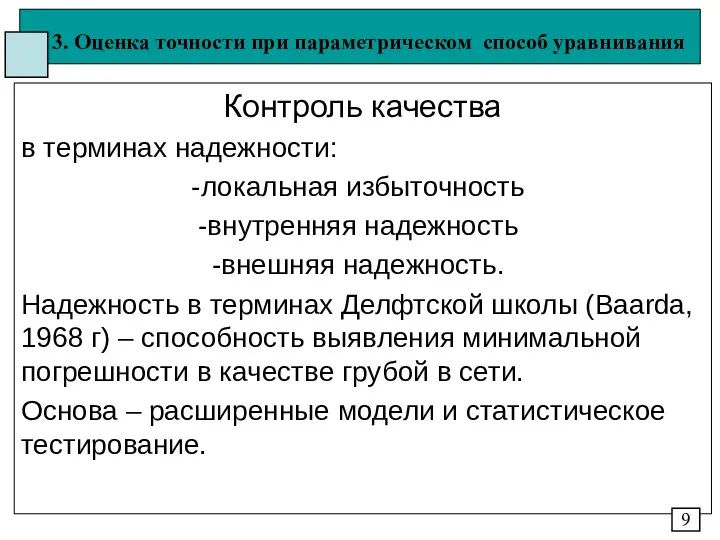
- 9. 3. Оценка точности при параметрическом способ уравнивания Контроль качества в терминах надежности: локальная избыточность внутренняя надежность
- 10. 3. Оценка точности при параметрическом способ уравнивания Основа контроля качества в терминах точности – ковариационная матрица
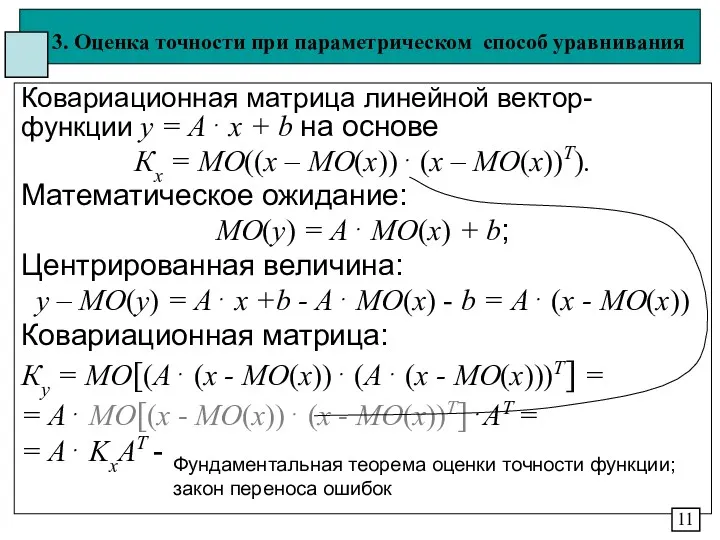
- 11. 3. Оценка точности при параметрическом способ уравнивания Ковариационная матрица линейной вектор-функции y = A⋅ x +
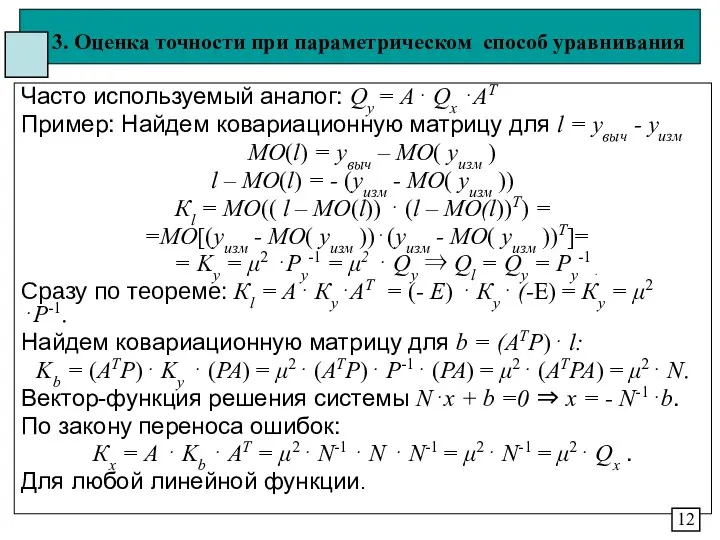
- 12. 3. Оценка точности при параметрическом способ уравнивания Часто используемый аналог: Qy = A⋅ Qx ⋅AT Пример:
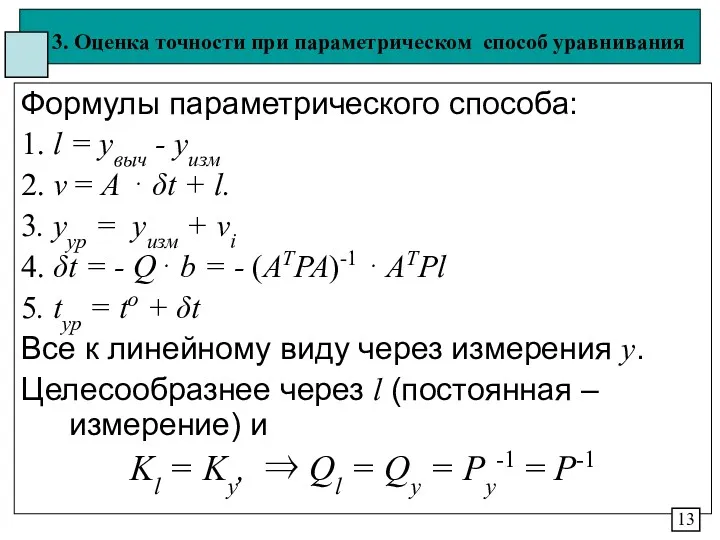
- 13. 3. Оценка точности при параметрическом способ уравнивания Формулы параметрического способа: 1. l = yвыч - yизм
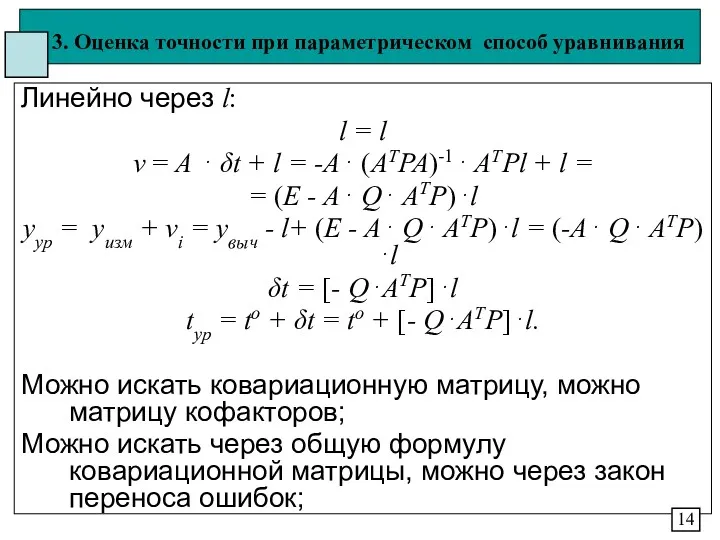
- 14. 3. Оценка точности при параметрическом способ уравнивания Линейно через l: l = l v = A
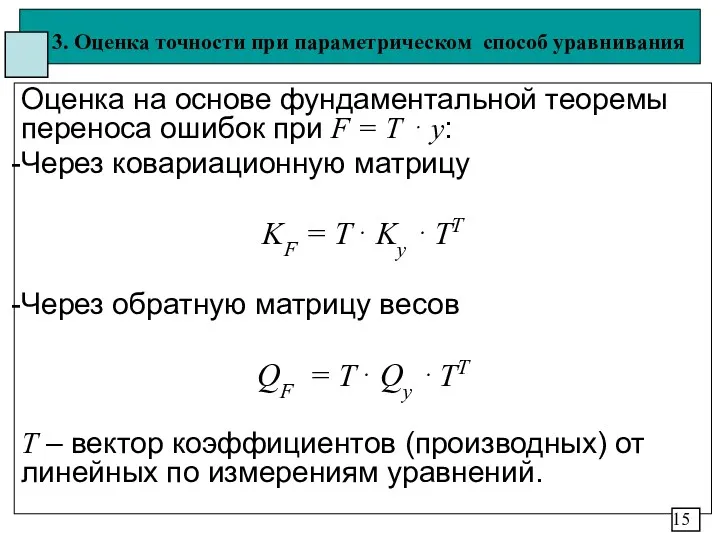
- 15. 3. Оценка точности при параметрическом способ уравнивания Оценка на основе фундаментальной теоремы переноса ошибок при F
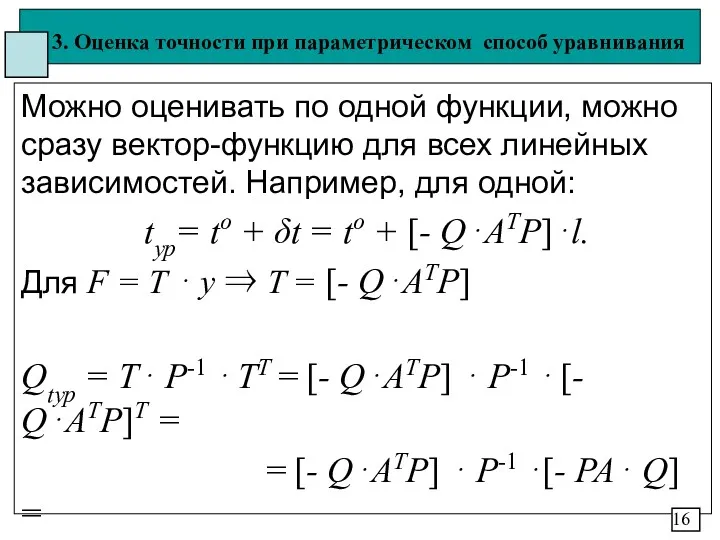
- 16. 3. Оценка точности при параметрическом способ уравнивания Можно оценивать по одной функции, можно сразу вектор-функцию для
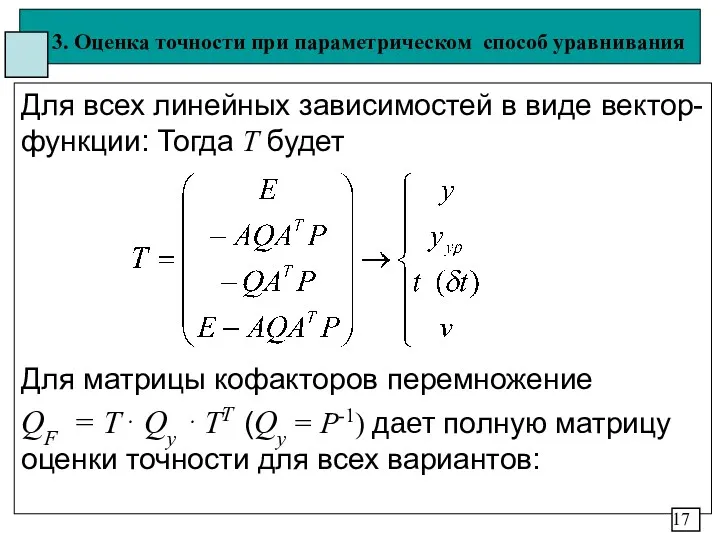
- 17. 3. Оценка точности при параметрическом способ уравнивания Для всех линейных зависимостей в виде вектор-функции: Тогда Т
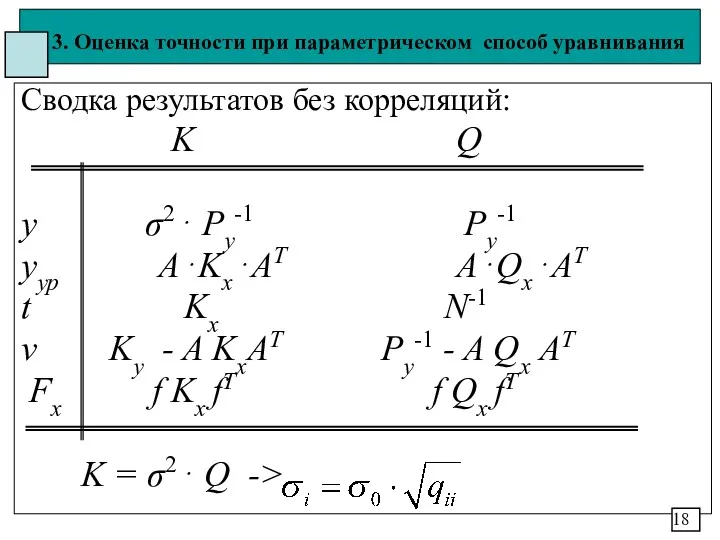
- 18. 3. Оценка точности при параметрическом способ уравнивания Сводка результатов без корреляций: K Q y σ2⋅ Py-1
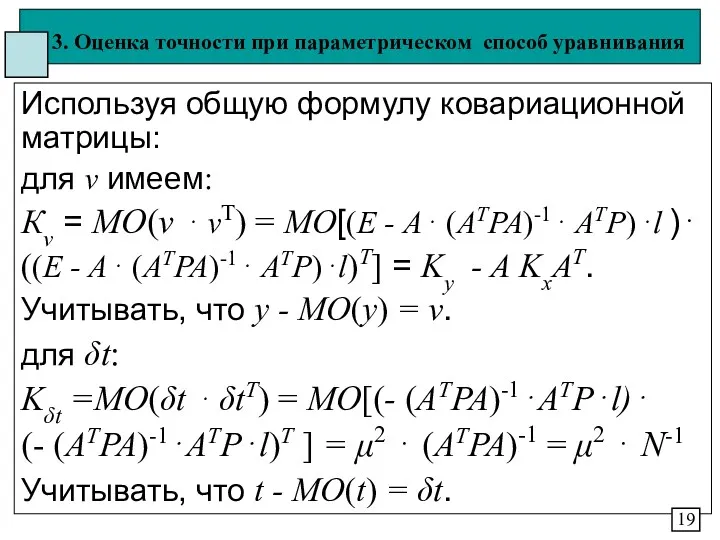
- 19. 3. Оценка точности при параметрическом способ уравнивания Используя общую формулу ковариационной матрицы: для v имеем: Кv
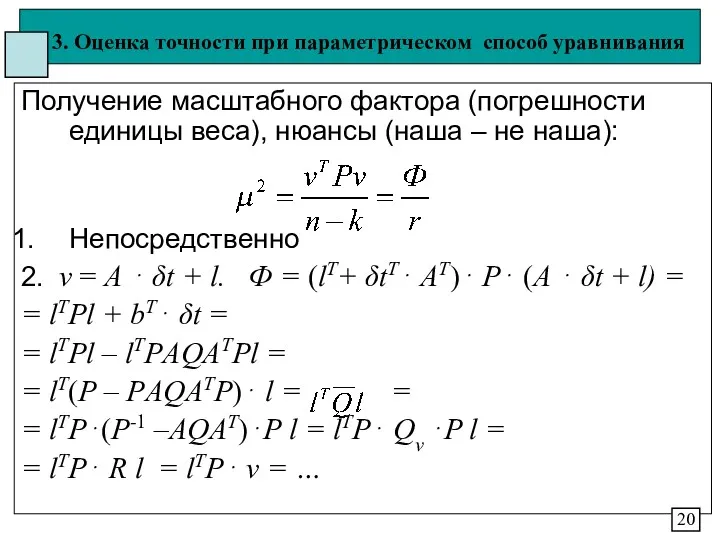
- 20. 3. Оценка точности при параметрическом способ уравнивания Получение масштабного фактора (погрешности единицы веса), нюансы (наша –
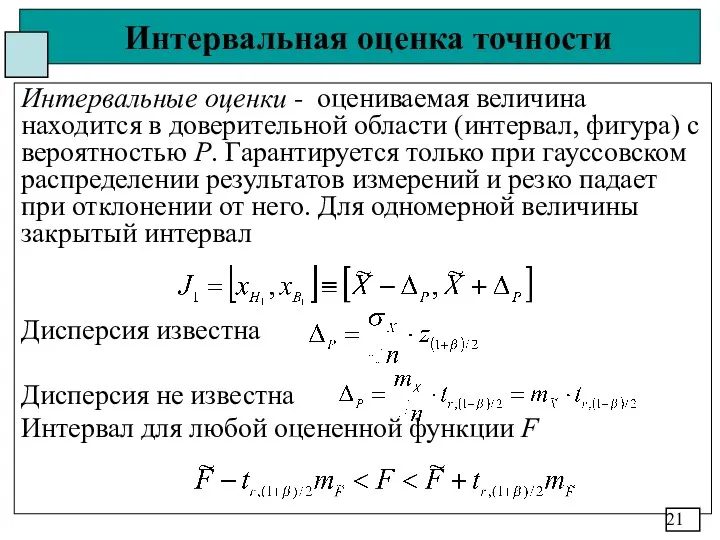
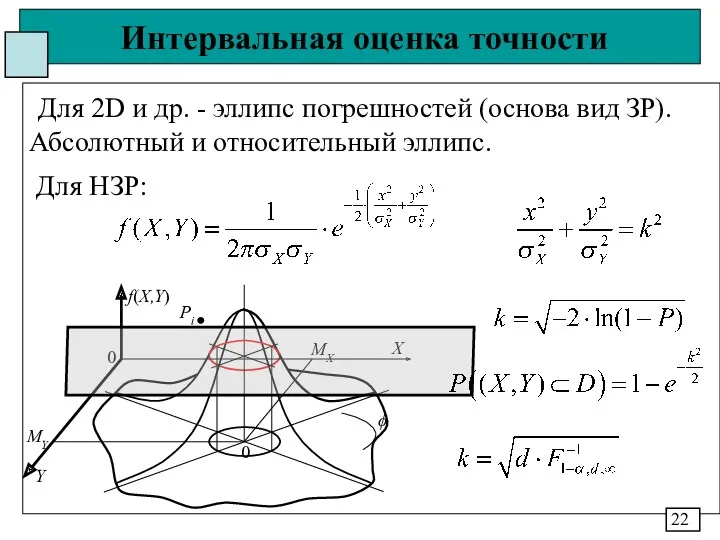
- 21. Интервальная оценка точности Интервальные оценки - оцениваемая величина находится в доверительной области (интервал, фигура) с вероятностью
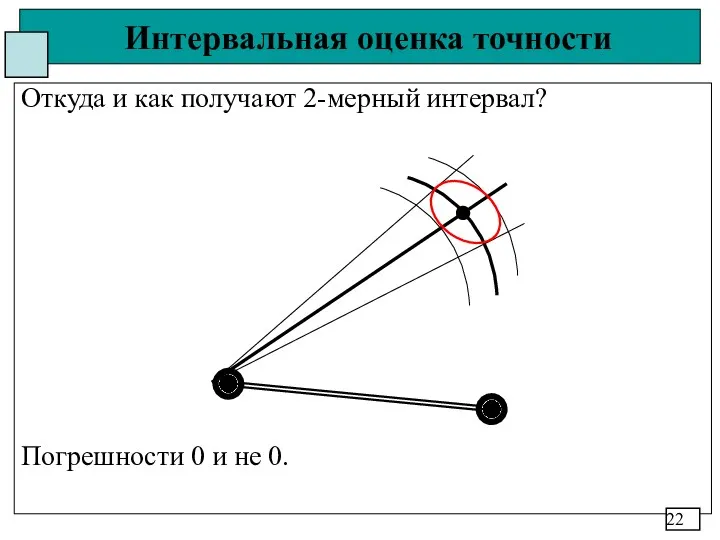
- 22. Интервальная оценка точности Откуда и как получают 2-мерный интервал? Погрешности 0 и не 0. 22
- 23. Интервальная оценка точности Для 2D и др. - эллипс погрешностей (основа вид ЗР). Абсолютный и относительный
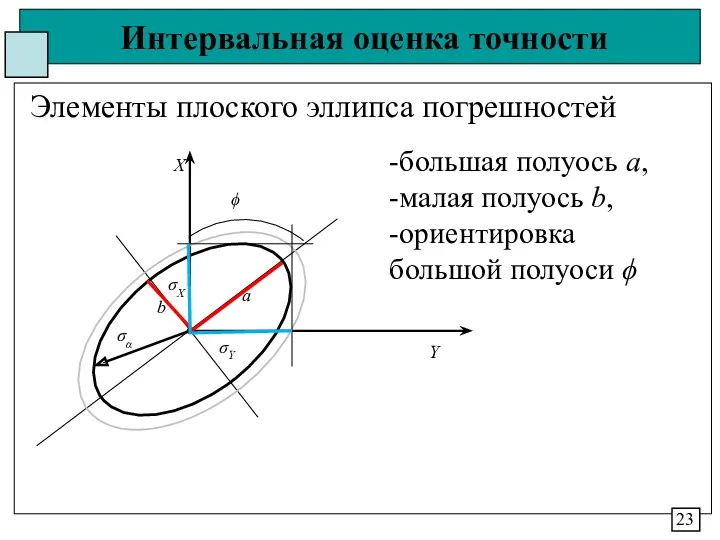
- 24. Интервальная оценка точности Элементы плоского эллипса погрешностей 23 -большая полуось а, -малая полуось b, -ориентировка большой
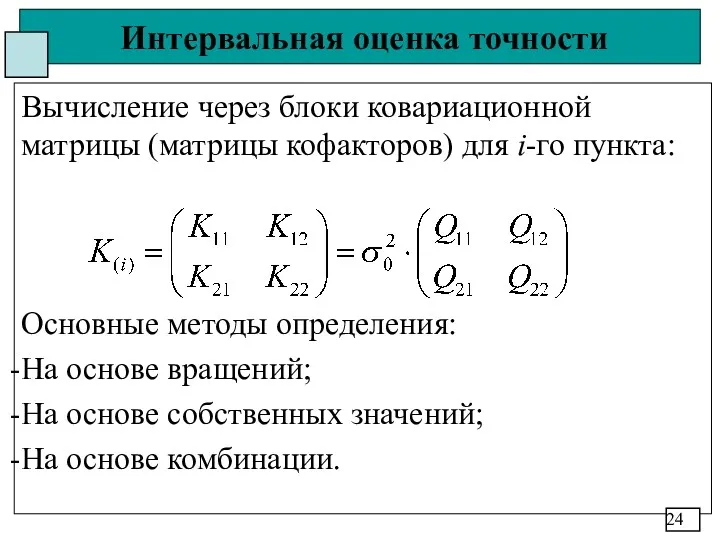
- 25. Интервальная оценка точности Вычисление через блоки ковариационной матрицы (матрицы кофакторов) для i-го пункта: Основные методы определения:
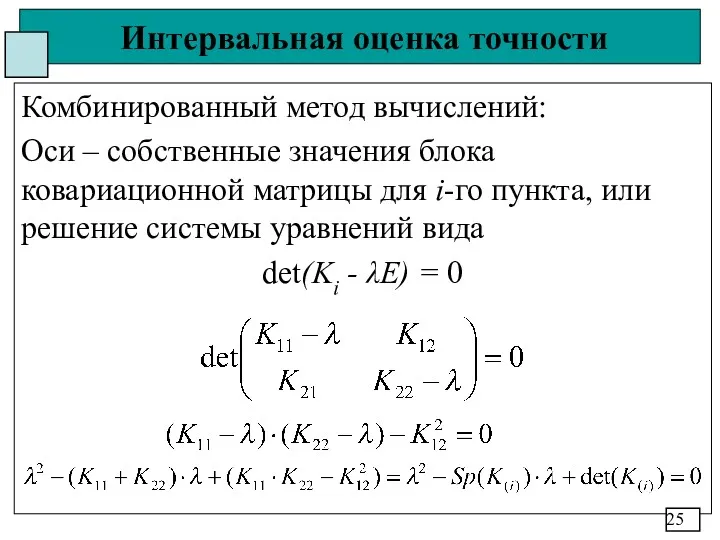
- 26. Интервальная оценка точности Комбинированный метод вычислений: Оси – собственные значения блока ковариационной матрицы для i-го пункта,
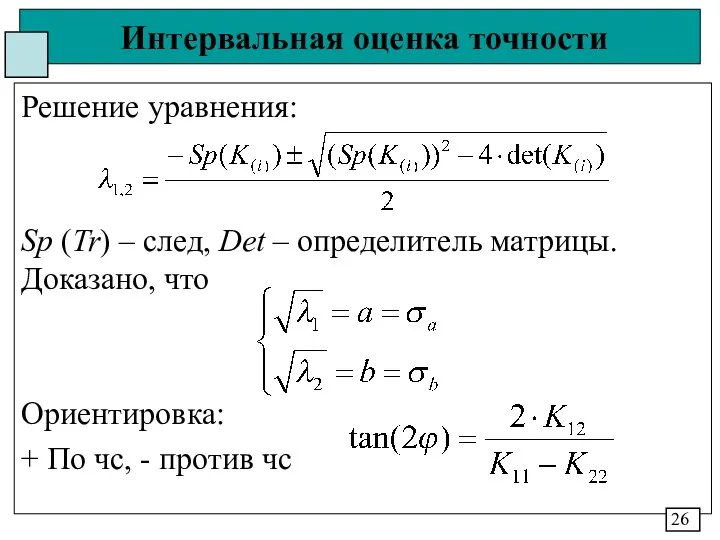
- 27. Интервальная оценка точности Решение уравнения: Sp (Tr) – след, Det – определитель матрицы. Доказано, что Ориентировка:
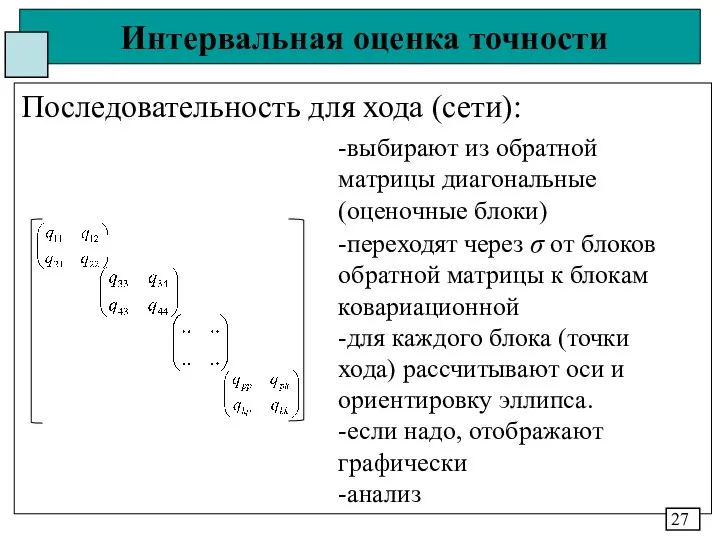
- 28. Интервальная оценка точности Последовательность для хода (сети): 27 -выбирают из обратной матрицы диагональные (оценочные блоки) -переходят
- 29. Интервальная оценка точности Относительный эллипс погрешностей: Представляет доверительную область при оценивании точности позиционирования i-той определяемой точки
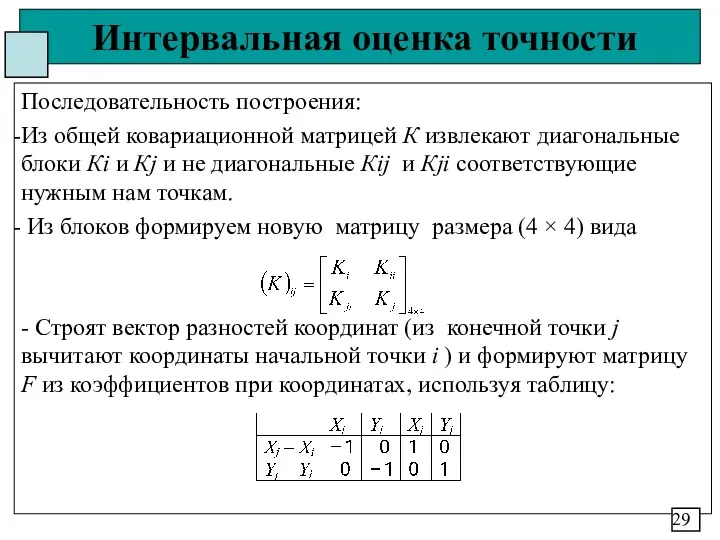
- 30. Интервальная оценка точности Последовательность построения: Из общей ковариационной матрицей К извлекают диагональные блоки Кi и Кj
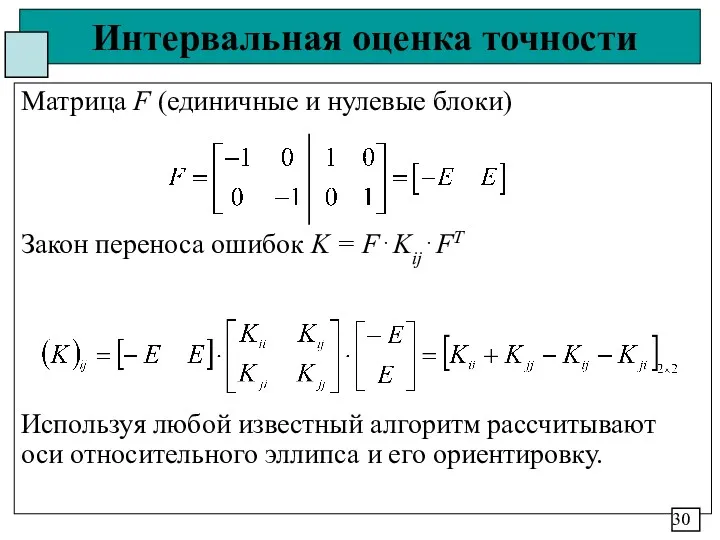
- 31. Интервальная оценка точности Матрица F (единичные и нулевые блоки) Закон переноса ошибок K = F⋅Kij⋅FT Используя
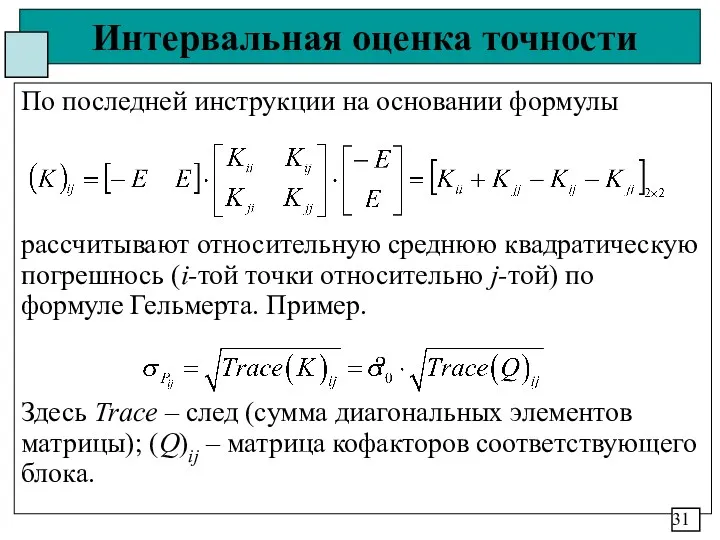
- 32. Интервальная оценка точности По последней инструкции на основании формулы рассчитывают относительную среднюю квадратическую погрешнось (i-той точки
- 34. Скачать презентацию
3. Оценка точности при параметрическом способ уравнивания
Некоторые приемы перемножения матрицы вручную:
2
3. Оценка точности при параметрическом способ уравнивания
Некоторые приемы перемножения матрицы вручную:
2
3. Оценка точности при параметрическом способ уравнивания
Обращение матрицы 2х2:
3
3. Оценка точности при параметрическом способ уравнивания
Обращение матрицы 2х2:
3
3. Оценка точности при параметрическом способ уравнивания
Оценивание
уравнивание оценка точности
(количество) (качество)
Оценка точности
3. Оценка точности при параметрическом способ уравнивания
Оценивание
уравнивание оценка точности
(количество) (качество)
Оценка точности
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
в терминах точности
- локальные,
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
в терминах точности
- локальные,
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
2 основа – ковариационная матрица
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
2 основа – ковариационная матрица
3. Оценка точности при параметрическом способ уравнивания
Локальная оценка – оценивается 1 элемент
3. Оценка точности при параметрическом способ уравнивания
Локальная оценка – оценивается 1 элемент
3. Оценка точности при параметрическом способ уравнивания
Пример. В нивелирной сети 4 параметра
3. Оценка точности при параметрическом способ уравнивания
Пример. В нивелирной сети 4 параметра
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
в терминах надежности:
локальная избыточность
внутренняя надежность
внешняя
3. Оценка точности при параметрическом способ уравнивания
Контроль качества
в терминах надежности:
локальная избыточность
внутренняя надежность
внешняя
3. Оценка точности при параметрическом способ уравнивания
Основа контроля качества в терминах точности
3. Оценка точности при параметрическом способ уравнивания
Основа контроля качества в терминах точности

3. Оценка точности при параметрическом способ уравнивания
Ковариационная матрица линейной вектор-функции y =
3. Оценка точности при параметрическом способ уравнивания
Ковариационная матрица линейной вектор-функции y =
3. Оценка точности при параметрическом способ уравнивания
Часто используемый аналог: Qy = A⋅
3. Оценка точности при параметрическом способ уравнивания
Часто используемый аналог: Qy = A⋅
3. Оценка точности при параметрическом способ уравнивания
Формулы параметрического способа:
1. l = yвыч
3. Оценка точности при параметрическом способ уравнивания
Формулы параметрического способа:
1. l = yвыч
3. Оценка точности при параметрическом способ уравнивания
Линейно через l:
l = l
v
3. Оценка точности при параметрическом способ уравнивания
Линейно через l:
l = l
v
3. Оценка точности при параметрическом способ уравнивания
Оценка на основе фундаментальной теоремы переноса
3. Оценка точности при параметрическом способ уравнивания
Оценка на основе фундаментальной теоремы переноса
3. Оценка точности при параметрическом способ уравнивания
Можно оценивать по одной функции, можно
3. Оценка точности при параметрическом способ уравнивания
Можно оценивать по одной функции, можно
3. Оценка точности при параметрическом способ уравнивания
Для всех линейных зависимостей в виде
3. Оценка точности при параметрическом способ уравнивания
Для всех линейных зависимостей в виде
3. Оценка точности при параметрическом способ уравнивания
Сводка результатов без корреляций:
K Q
y
3. Оценка точности при параметрическом способ уравнивания
Сводка результатов без корреляций:
K Q
y
3. Оценка точности при параметрическом способ уравнивания
Используя общую формулу ковариационной матрицы:
для v
3. Оценка точности при параметрическом способ уравнивания
Используя общую формулу ковариационной матрицы:
для v
3. Оценка точности при параметрическом способ уравнивания
Получение масштабного фактора (погрешности единицы веса),
3. Оценка точности при параметрическом способ уравнивания
Получение масштабного фактора (погрешности единицы веса),
Интервальная оценка точности
Интервальные оценки - оцениваемая величина находится в доверительной области (интервал,
Интервальная оценка точности
Интервальные оценки - оцениваемая величина находится в доверительной области (интервал,
Интервальная оценка точности
Откуда и как получают 2-мерный интервал?
Погрешности 0 и не 0.
22
Интервальная оценка точности
Откуда и как получают 2-мерный интервал?
Погрешности 0 и не 0.
22
Интервальная оценка точности
Для 2D и др. - эллипс погрешностей (основа вид
Интервальная оценка точности
Для 2D и др. - эллипс погрешностей (основа вид
Интервальная оценка точности
Элементы плоского эллипса погрешностей
23
-большая полуось а,
-малая полуось b,
-ориентировка
Интервальная оценка точности
Элементы плоского эллипса погрешностей
23
-большая полуось а,
-малая полуось b,
-ориентировка
Интервальная оценка точности
Вычисление через блоки ковариационной матрицы (матрицы кофакторов) для i-го пункта:
Основные
Интервальная оценка точности
Вычисление через блоки ковариационной матрицы (матрицы кофакторов) для i-го пункта:
Основные
Интервальная оценка точности
Комбинированный метод вычислений:
Оси – собственные значения блока ковариационной матрицы для
Интервальная оценка точности
Комбинированный метод вычислений:
Оси – собственные значения блока ковариационной матрицы для
Интервальная оценка точности
Решение уравнения:
Sp (Tr) – след, Det – определитель матрицы. Доказано,
Интервальная оценка точности
Решение уравнения:
Sp (Tr) – след, Det – определитель матрицы. Доказано,
Интервальная оценка точности
Последовательность для хода (сети):
27
-выбирают из обратной матрицы диагональные (оценочные
Интервальная оценка точности
Последовательность для хода (сети):
27
-выбирают из обратной матрицы диагональные (оценочные
Интервальная оценка точности
Относительный эллипс погрешностей:
Представляет доверительную область при оценивании точности позиционирования i-той
Интервальная оценка точности
Относительный эллипс погрешностей:
Представляет доверительную область при оценивании точности позиционирования i-той
Интервальная оценка точности
Последовательность построения:
Из общей ковариационной матрицей К извлекают диагональные блоки Кi
Интервальная оценка точности
Последовательность построения:
Из общей ковариационной матрицей К извлекают диагональные блоки Кi
Интервальная оценка точности
Матрица F (единичные и нулевые блоки)
Закон переноса ошибок K =
Интервальная оценка точности
Матрица F (единичные и нулевые блоки)
Закон переноса ошибок K =
Интервальная оценка точности
По последней инструкции на основании формулы
рассчитывают относительную среднюю квадратическую погрешнось
Интервальная оценка точности
По последней инструкции на основании формулы
рассчитывают относительную среднюю квадратическую погрешнось
 Множество значений функции (+ презентация)
Множество значений функции (+ презентация) НОД по развитию интеллектуальных способностей Цветик - семицветик
НОД по развитию интеллектуальных способностей Цветик - семицветик Окружность, хорда, диаметр
Окружность, хорда, диаметр Закрепление знаний по теме Сложение и вычитание
Закрепление знаний по теме Сложение и вычитание Виды углов. Измерение углов
Виды углов. Измерение углов Графическое решение квадратных уравнений
Графическое решение квадратных уравнений Активизация познавательной деятельности на уроках математики
Активизация познавательной деятельности на уроках математики Способы решения логических задач
Способы решения логических задач Финно-угорская система счисления
Финно-угорская система счисления Умножение и деление степеней
Умножение и деление степеней Действия с дробями. Задачи на движения
Действия с дробями. Задачи на движения Измерение отрезков
Измерение отрезков Системы линейных уравнений
Системы линейных уравнений Множества. Последовательность
Множества. Последовательность Развитие логического мышления у детей дошкольного возраста через использование блоков Дьенеша
Развитие логического мышления у детей дошкольного возраста через использование блоков Дьенеша Разработка контрольно-диагностического материала по разделу математики Натуральные числа 5 класса
Разработка контрольно-диагностического материала по разделу математики Натуральные числа 5 класса Запись смешанного числа в виде неправильной дроби.
Запись смешанного числа в виде неправильной дроби. Объём цилиндра в заданиях ЕГЭ
Объём цилиндра в заданиях ЕГЭ Дисперсионный анализ
Дисперсионный анализ Умножение и деление десятичных дробей
Умножение и деление десятичных дробей Теория судна. Общие представления о морском волнении
Теория судна. Общие представления о морском волнении Методы описания детерминированных и случайных процессов в информационных системах (тема № 4)
Методы описания детерминированных и случайных процессов в информационных системах (тема № 4) Квадратные уравнения. Разработка раздела образовательной программы алгебры 8 класса
Квадратные уравнения. Разработка раздела образовательной программы алгебры 8 класса Основні види моделювання. Формальні методи побудови моделей
Основні види моделювання. Формальні методи побудови моделей Последовательность выполнения действий в выражении
Последовательность выполнения действий в выражении Презентация к уроку математики во 2 классе Умножение на 0 и 1 по программе Школа 2100 по УМК Моя математика (Т.Е.Демидова, С.А.Козлова, А.П.Тонких)
Презентация к уроку математики во 2 классе Умножение на 0 и 1 по программе Школа 2100 по УМК Моя математика (Т.Е.Демидова, С.А.Козлова, А.П.Тонких) Интегрированный урок по теме Внетабличное умножение и деление. Экологическая безопасность. 3 класс
Интегрированный урок по теме Внетабличное умножение и деление. Экологическая безопасность. 3 класс Магические свойства чисел
Магические свойства чисел