- Плоскопараллельное движение твердого тела (плоское)

Содержание
- 2. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ Основная плоскость A B C А1 В1 D Рассмотрим произвольное сечение. Произвольные точки сечения
- 3. Уравнения плоскопараллельного движения A φ B Точка А - полюс
- 4. Пример плоскопараллельного движения твердого тела
- 5. Разложение плоскопараллельного движения на простейшие виды движения φ φ А В А1 В1 В2 А2 Было
- 6. Геометрическая интерпретация теоремы А В ω Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса
- 7. Теорема о проекциях скоростей двух точек тела на прямую, соединяющую эти точки A B VA VB
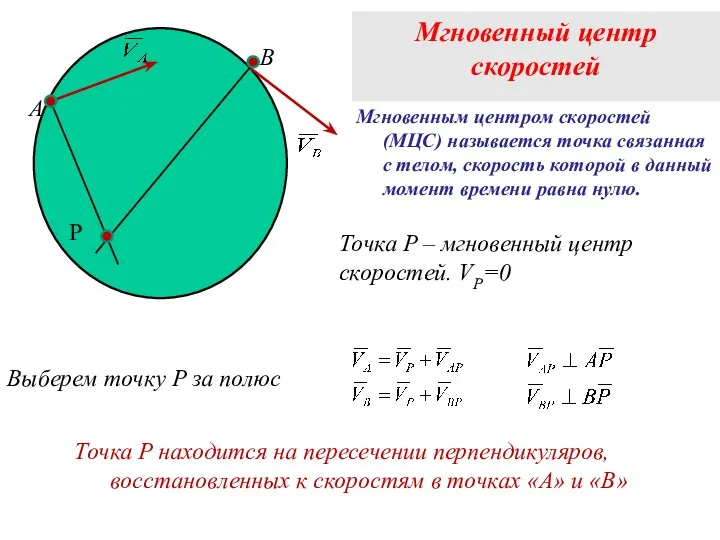
- 8. P A B Точка P – мгновенный центр скоростей. VP=0 Точка P находится на пересечении перпендикуляров,
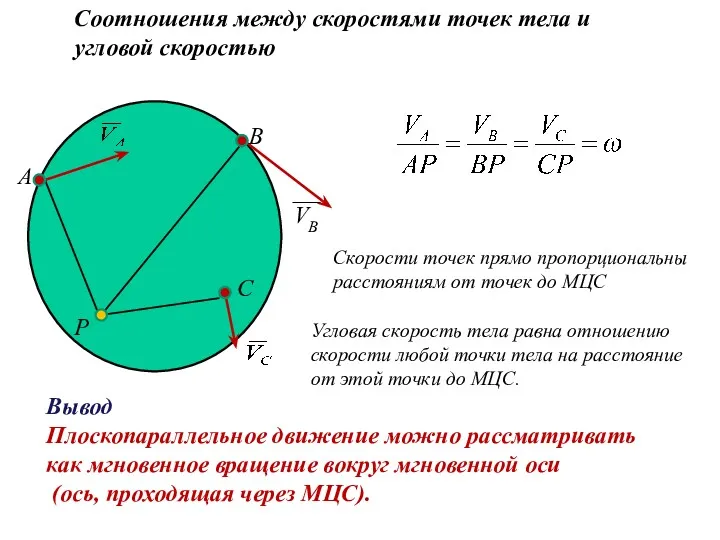
- 9. Соотношения между скоростями точек тела и угловой скоростью Вывод Плоскопараллельное движение можно рассматривать как мгновенное вращение
- 10. Скорости двух точек тела параллельны друг другу, не равны между собой и перпендикулярны прямой соединяющей эти
- 11. Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки. А В МЦС в бесконечности
- 12. 4. Тело катится без скольжения по неподвижной поверхности. ω
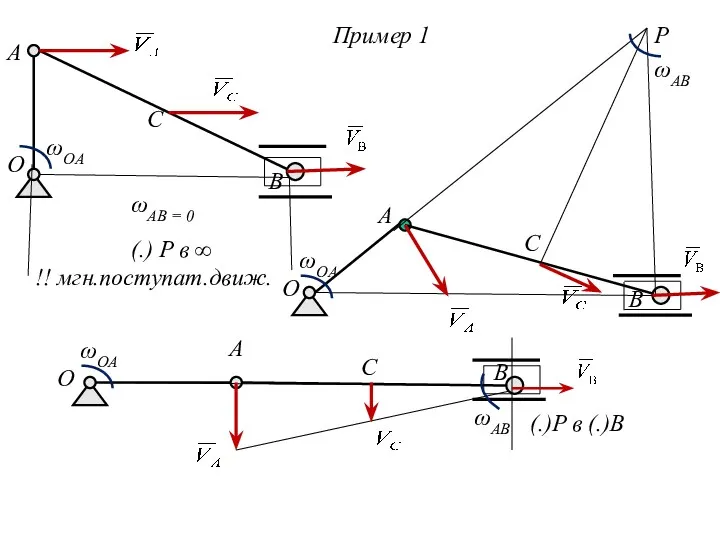
- 13. O O O A A A B B B C C C ωOA ωOA ωOA ωAB
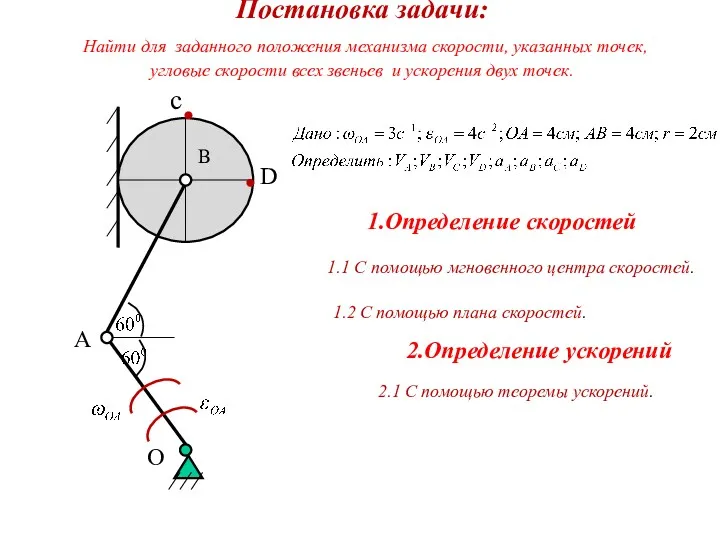
- 14. Постановка задачи: Найти для заданного положения механизма скорости, указанных точек, угловые скорости всех звеньев и ускорения
- 15. Для заданного положения механизма определить скорости всех указанных точек и угловые скорости всех звеньев. С PAB
- 16. 3.Определение скоростей с помощью мгновенного центра скоростей В A D O В В PAB С
- 17. A D O В В 4.Построение плана скоростей Графическое изображение векторов скоростей точек плоской фигуры О1
- 18. Свойства плана скоростей Одноименные отрезки плана скоростей и механизма взаимно перпендикулярны. 2. Одноименные отрезки плана скоростей
- 19. Правило оформления ИДЗ К. Титульный лист. «Кинематический анализ плоского механизма.» Формат отчета: А4 Лист 1. Схема
- 20. Защита задания Найти скорость точки К (двумя способами) A D O В В PAB К VК
- 21. Теорема о сложении ускорений точек при плоскопараллельном движении тела Ускорение произвольной точки тела при его плоскопараллельном
- 22. Геометрическая интерпретация Теоремы о сложении ускорений
- 23. Постановка задачи: Найти для заданного положения механизма ускорения всех указанных точек и угловые ускорения всех звеньев.
- 24. Аналитическое определение ускорений. O Проведем оси координат и спроецируем (*) на эти оси (*)
- 25. Найти ускорения всех указанных точек и угловое ускорение диска. В Спроецируем (*) на оси координат (*)
- 26. Пример определения ускорения точки В, когда не известно его направление. α ωAB А В α ωOB
- 27. Свойства плана ускорений 1. Одноименные отрезки плана ускорений и механизма прямо пропорциональны. 2. Одноименные фигуры плана
- 28. План ускорений Графическое изображение векторов ускорений точек плоской фигуры O
- 30. Скачать презентацию
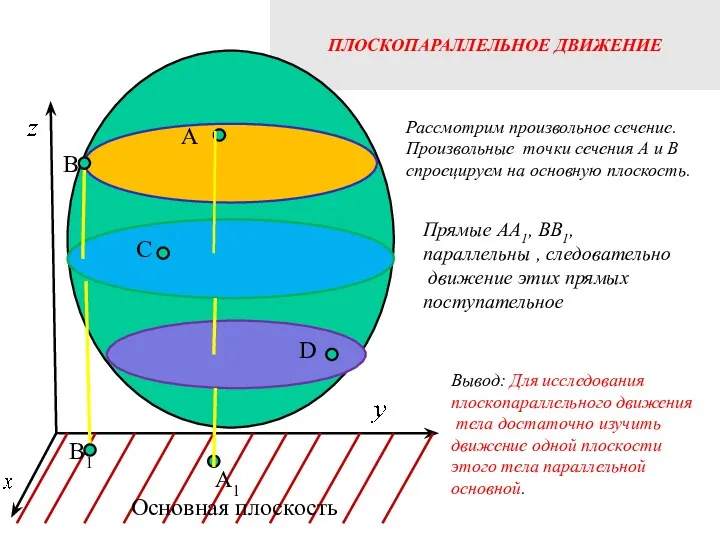
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
Основная плоскость
A
B
C
А1
В1
D
Рассмотрим произвольное сечение.
Произвольные точки сечения А и B
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
Основная плоскость
A
B
C
А1
В1
D
Рассмотрим произвольное сечение.
Произвольные точки сечения А и B
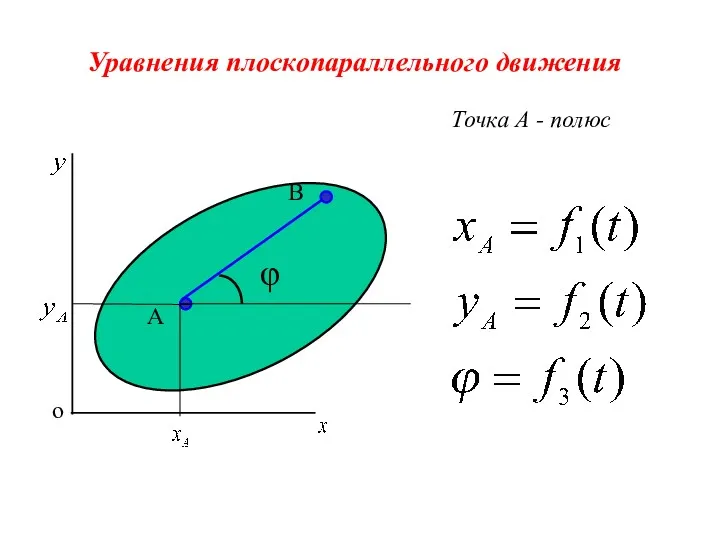
Уравнения плоскопараллельного движения
A
φ
B
Точка А - полюс
Уравнения плоскопараллельного движения
A
φ
B
Точка А - полюс
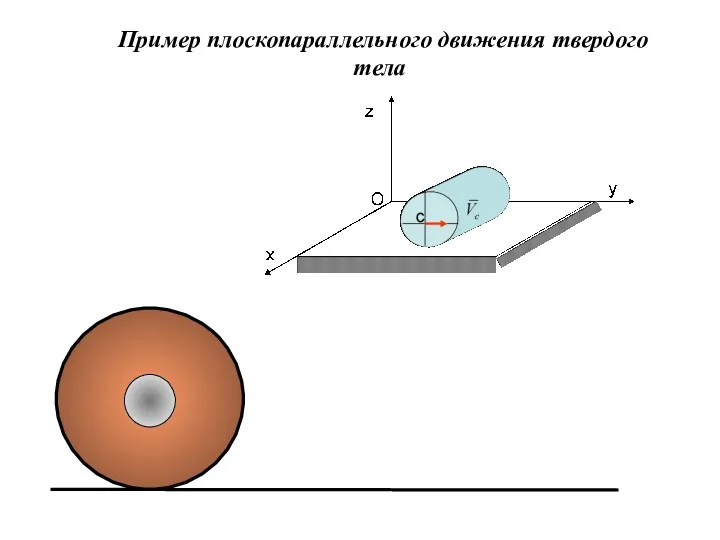
Пример плоскопараллельного движения твердого тела
Пример плоскопараллельного движения твердого тела
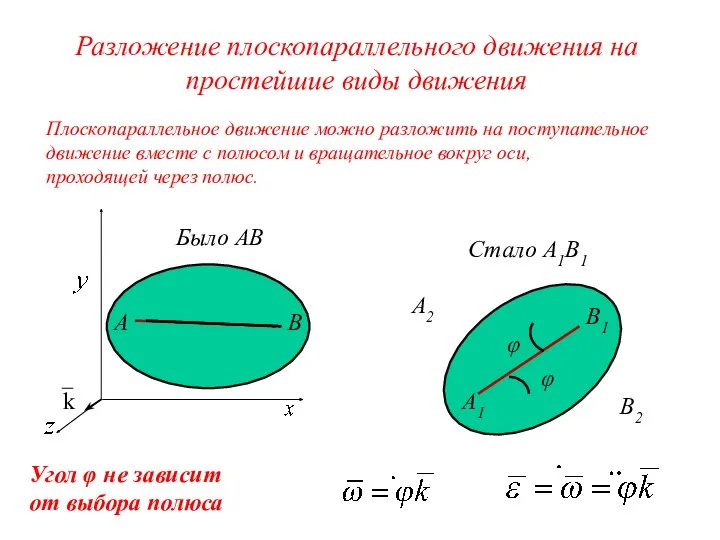
Разложение плоскопараллельного движения на простейшие виды движения
φ
φ
А
В
А1
В1
В2
А2
Было АВ
k
Угол φ не зависит
Разложение плоскопараллельного движения на простейшие виды движения
φ
φ
А
В
А1
В1
В2
А2
Было АВ
k
Угол φ не зависит
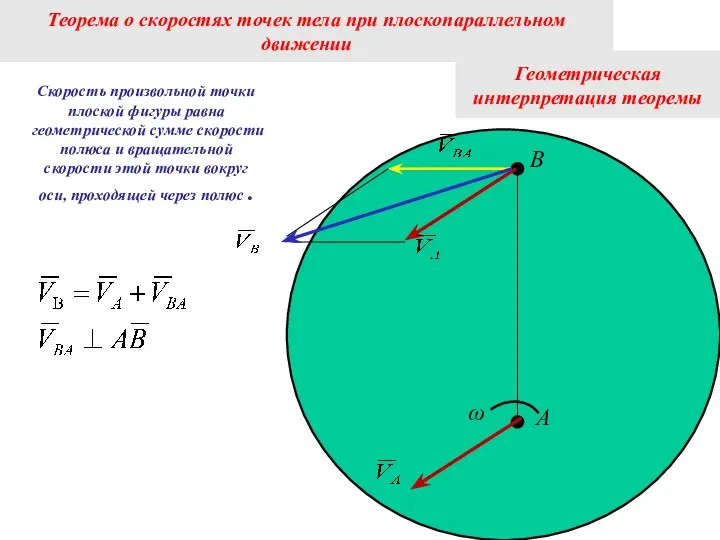
Геометрическая интерпретация теоремы
А
В
ω
Скорость произвольной точки плоской фигуры равна геометрической сумме
Геометрическая интерпретация теоремы
А
В
ω
Скорость произвольной точки плоской фигуры равна геометрической сумме
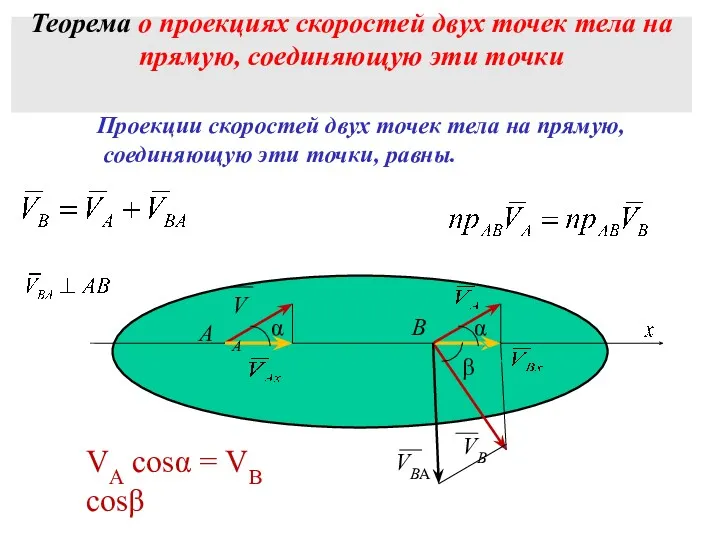
Теорема о проекциях скоростей двух точек тела на прямую, соединяющую эти
Теорема о проекциях скоростей двух точек тела на прямую, соединяющую эти
P
A
B
Точка P – мгновенный центр
скоростей. VP=0
Точка P находится на пересечении перпендикуляров,
P
A
B
Точка P – мгновенный центр
скоростей. VP=0
Точка P находится на пересечении перпендикуляров,
Соотношения между скоростями точек тела и угловой скоростью
Вывод
Плоскопараллельное движение можно рассматривать
как
Соотношения между скоростями точек тела и угловой скоростью
Вывод
Плоскопараллельное движение можно рассматривать
как
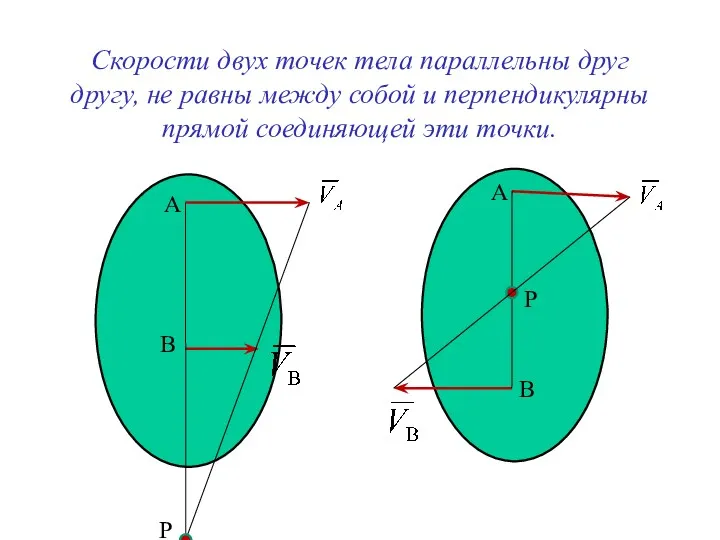
Скорости двух точек тела параллельны друг другу, не равны между собой
Скорости двух точек тела параллельны друг другу, не равны между собой
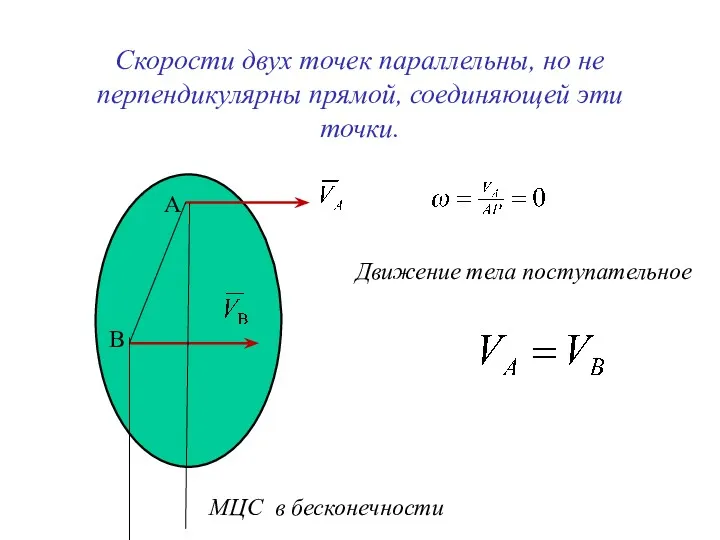
Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
А
В
МЦС
Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
А
В
МЦС
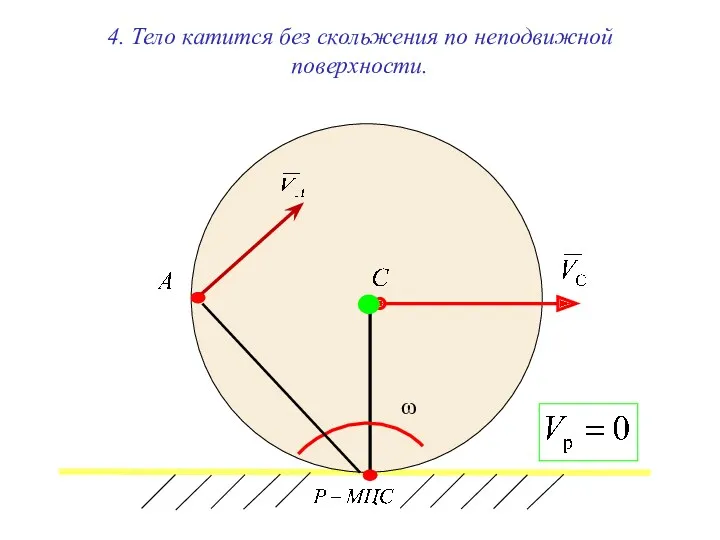
4. Тело катится без скольжения по неподвижной поверхности.
ω
4. Тело катится без скольжения по неподвижной поверхности.
ω
O
O
O
A
A
A
B
B
B
C
C
C
ωOA
ωOA
ωOA
ωAB = 0
ωAB
ωAB
(.) P в ∞
!! мгн.поступат.движ.
(.)P в
O
O
O
A
A
A
B
B
B
C
C
C
ωOA
ωOA
ωOA
ωAB = 0
ωAB
ωAB
(.) P в ∞
!! мгн.поступат.движ.
(.)P в
Постановка задачи:
Найти для заданного положения механизма скорости, указанных точек, угловые
Постановка задачи: Найти для заданного положения механизма скорости, указанных точек, угловые
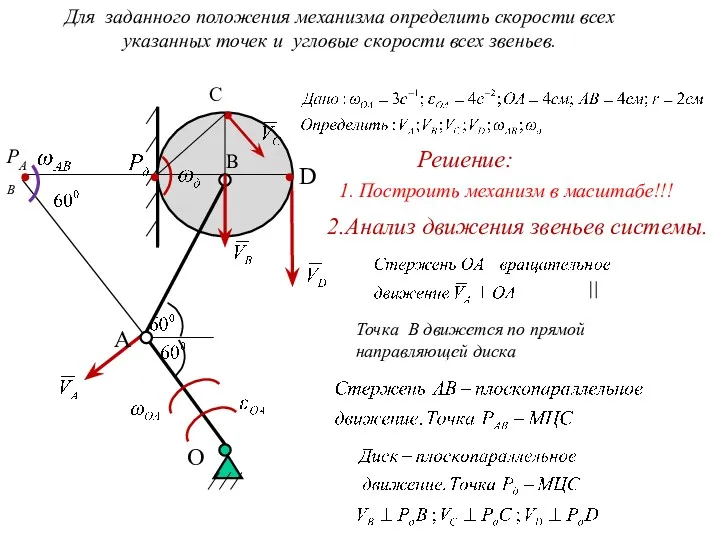
Для заданного положения механизма определить скорости всех указанных точек и угловые
Для заданного положения механизма определить скорости всех указанных точек и угловые
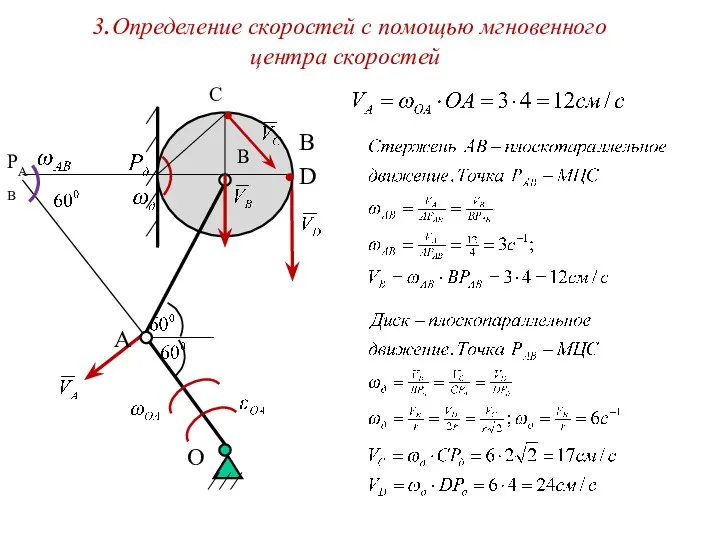
3.Определение скоростей с помощью мгновенного центра скоростей
В
A
D
O
В
В
PAB
С
3.Определение скоростей с помощью мгновенного центра скоростей
В
A
D
O
В
В
PAB
С
A
D
O
В
В
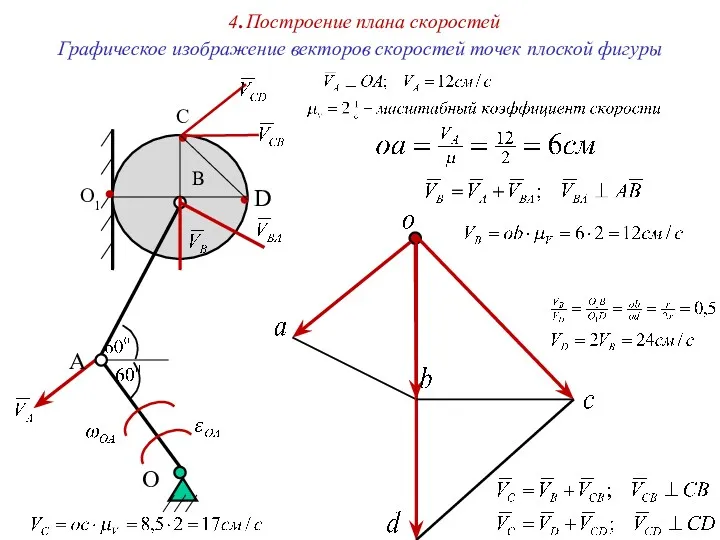
4.Построение плана скоростей
Графическое изображение векторов скоростей точек плоской фигуры
О1
С
A
D
O
В
В
4.Построение плана скоростей
Графическое изображение векторов скоростей точек плоской фигуры
О1
С
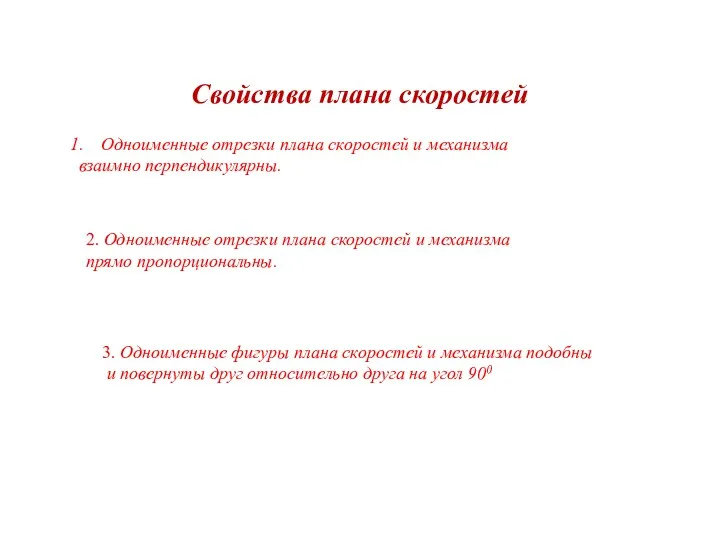
Свойства плана скоростей
Одноименные отрезки плана скоростей и механизма
взаимно перпендикулярны.
2. Одноименные
Свойства плана скоростей
Одноименные отрезки плана скоростей и механизма
взаимно перпендикулярны.
2. Одноименные
Правило оформления ИДЗ К.
Титульный лист.
«Кинематический анализ плоского механизма.»
Формат
Правило оформления ИДЗ К.
Титульный лист.
«Кинематический анализ плоского механизма.»
Формат
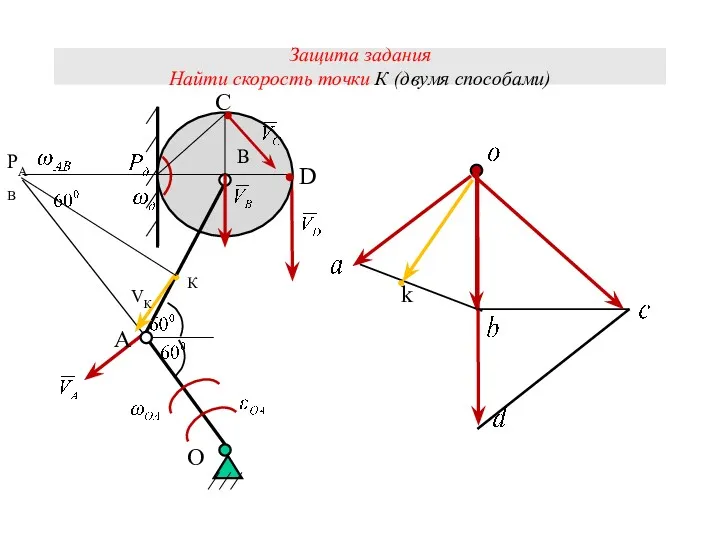
Защита задания
Найти скорость точки К (двумя способами)
A
D
O
В
В
PAB
К
VК
k
С
Защита задания
Найти скорость точки К (двумя способами)
A
D
O
В
В
PAB
К
VК
k
С

Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
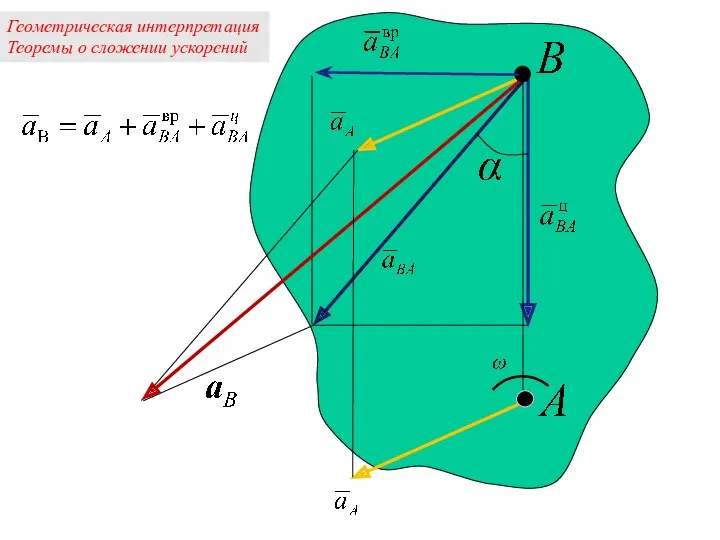
Геометрическая интерпретация
Теоремы о сложении ускорений
Геометрическая интерпретация
Теоремы о сложении ускорений
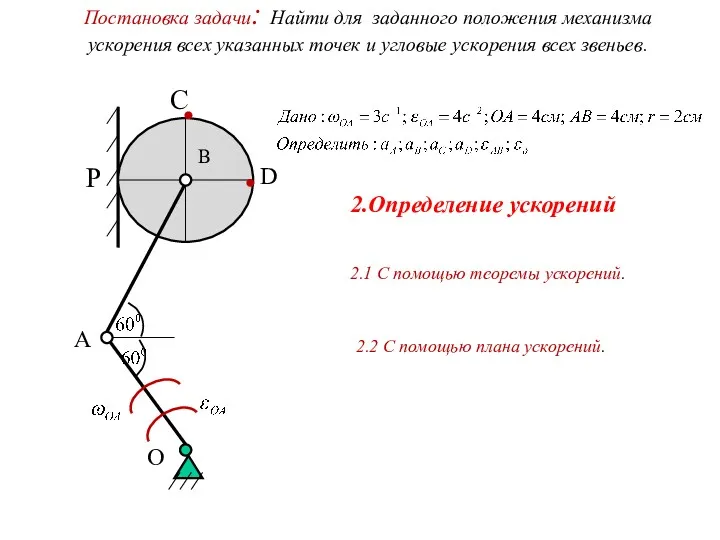
Постановка задачи: Найти для заданного положения механизма ускорения всех указанных точек
Постановка задачи: Найти для заданного положения механизма ускорения всех указанных точек
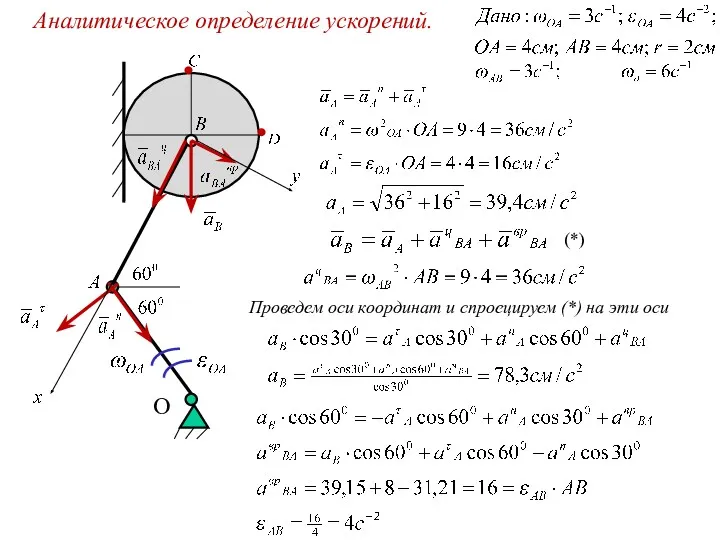
Аналитическое определение ускорений.
O
Проведем оси координат и спроецируем (*) на эти оси
(*)
Аналитическое определение ускорений.
O
Проведем оси координат и спроецируем (*) на эти оси
(*)
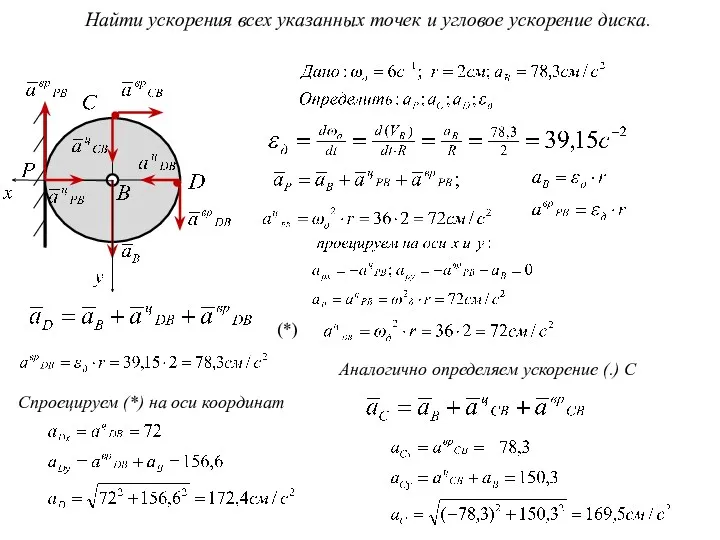
Найти ускорения всех указанных точек и угловое ускорение диска.
В
Спроецируем (*) на
Найти ускорения всех указанных точек и угловое ускорение диска.
В
Спроецируем (*) на
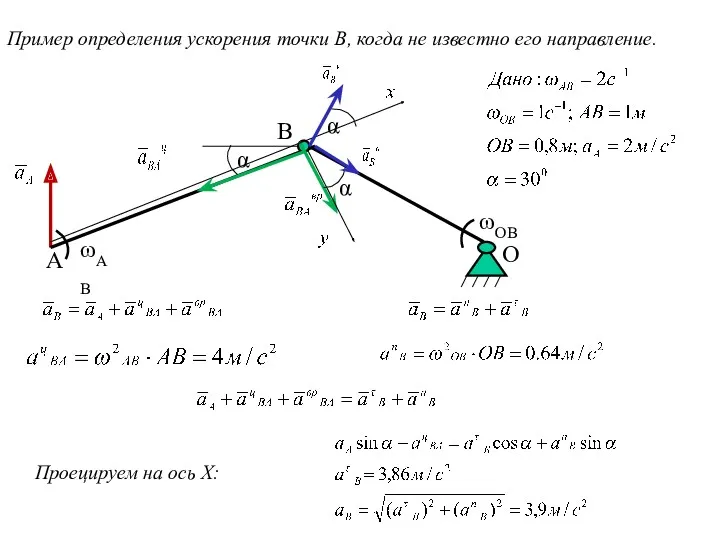
Пример определения ускорения точки В, когда не известно его направление.
α
ωAB
А
В
α
ωOB
Проецируем
Пример определения ускорения точки В, когда не известно его направление.
α
ωAB
А
В
α
ωOB
Проецируем
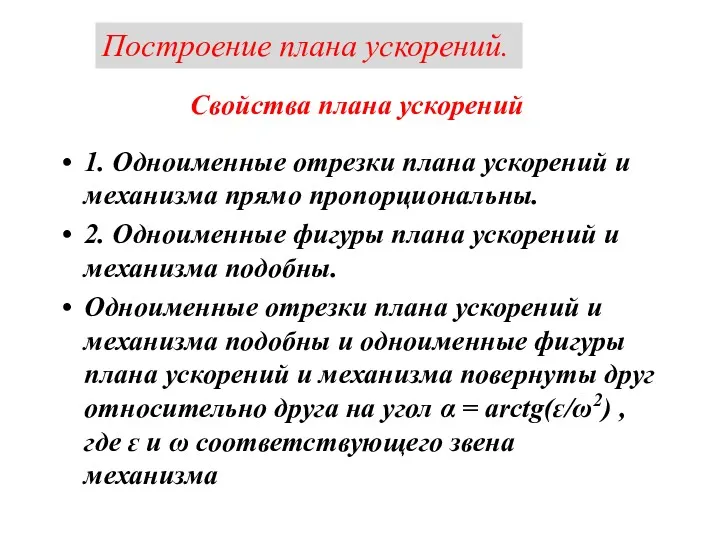
Свойства плана ускорений
1. Одноименные отрезки плана ускорений и механизма прямо пропорциональны.
Свойства плана ускорений
1. Одноименные отрезки плана ускорений и механизма прямо пропорциональны.
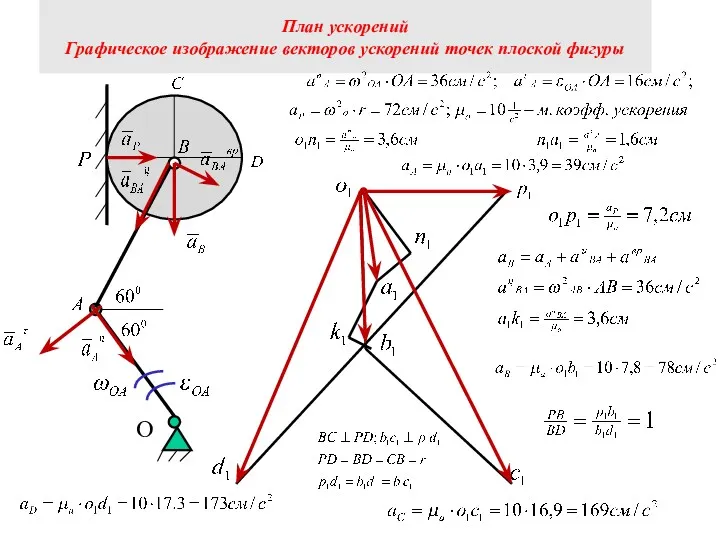
План ускорений
Графическое изображение векторов ускорений точек плоской фигуры
O
План ускорений
Графическое изображение векторов ускорений точек плоской фигуры
O
 Натуральные числа. Обозначение натуральных чисел
Натуральные числа. Обозначение натуральных чисел Геометрический смысл производной. Задачи типа В8 в ЕГЭ
Геометрический смысл производной. Задачи типа В8 в ЕГЭ Презентация Деление с остатком
Презентация Деление с остатком Доли. Обыкновенные дроби. 5 класс
Доли. Обыкновенные дроби. 5 класс Единицы времени УМК Гармония 4 класс УМК Гармония
Единицы времени УМК Гармония 4 класс УМК Гармония Конструирование системы задач по теме Линейная функция
Конструирование системы задач по теме Линейная функция ОТКРЫТЫЙ УРОК ПО МАТЕМАТИКЕ В 4 А КЛАССЕ ПО ТЕМЕ: АРИФМЕТИЧЕСКИЕ ДЕЙСТВИЯ НАД ЧИСЛАМИ
ОТКРЫТЫЙ УРОК ПО МАТЕМАТИКЕ В 4 А КЛАССЕ ПО ТЕМЕ: АРИФМЕТИЧЕСКИЕ ДЕЙСТВИЯ НАД ЧИСЛАМИ Решение систем линейных уравнений с двумя переменными
Решение систем линейных уравнений с двумя переменными Знаходження числа за його відсотком
Знаходження числа за його відсотком Франсуа Виет
Франсуа Виет Дерево возможных вариантов
Дерево возможных вариантов Математика. Основные разделы теста. 1 семестр
Математика. Основные разделы теста. 1 семестр Круги Эйлера в решении задач
Круги Эйлера в решении задач Одночлены и многочлены
Одночлены и многочлены Закон больших чисел
Закон больших чисел Единицы времени УМК Гармония 4 класс УМК Гармония
Единицы времени УМК Гармония 4 класс УМК Гармония Задачи на увеличение и уменьшение на несколько единиц
Задачи на увеличение и уменьшение на несколько единиц Состав чисел второго десятка с переходом через десяток
Состав чисел второго десятка с переходом через десяток Многоугольники. Четырехугольники
Многоугольники. Четырехугольники Григорий Яковлевич Перельман
Григорий Яковлевич Перельман Решение задач. 1 класс
Решение задач. 1 класс Действия с рациональными числами
Действия с рациональными числами Умножение десятичных дробей
Умножение десятичных дробей Что такое топология. Лист Мёбиуса
Что такое топология. Лист Мёбиуса Комплексные числа. Типовой вариант самостоятельной работы
Комплексные числа. Типовой вариант самостоятельной работы Сложение натуральных чисел и его свойства
Сложение натуральных чисел и его свойства Задания типа С5
Задания типа С5 Период радиоактивного распада. Решение задач. Интегрированный урок физика+математика 11 класс
Период радиоактивного распада. Решение задач. Интегрированный урок физика+математика 11 класс